近紅外光譜煤巖識別裝置研制
2022-08-13 08:00:16呂淵博王世博葛世榮周悅王賽亞柏永泰
工礦自動化 2022年7期
關鍵詞:標準
呂淵博, 王世博, 葛世榮, 周悅, 王賽亞, 柏永泰
(1. 中國礦業大學 機電工程學院,江蘇 徐州 221116;2. 中國礦業大學(北京) 機電與信息工程學院,北京 100083;3. 蘇州信息職業技術學院 電氣與電子工程系,江蘇 蘇州 215200;4. 中科院南京天文儀器有限公司 研發中心,江蘇 南京 210042;5. 徐州華達機電科技有限公司,江蘇 徐州 221100)
0 引言
綜采放頂煤開采工藝是一種適用于厚煤層與特厚煤層開采的方法,可實現采煤、放煤平行作業,使工作面單產和工效均大幅度提高[1]。進行放煤作業時通常需要根據后部刮板輸送機上放落煤巖的狀態判斷是否“關窗”,何時停止放煤是放煤作業的關鍵所在。以往都是工人憑借經驗并通過視覺和聽覺觀察放煤口狀況,主觀判斷停止時刻,并手動控制液壓支架停止放煤。然而放煤過程中的大量粉塵與工作面高分貝噪聲使得依靠人工目測和耳聽很難得出準確的判斷,常常導致過放和欠放,此外惡劣的環境嚴重影響工人的安全與身體健康。為了改善這一狀況并適應綜放工作面智能開采的需求,通過現代傳感技術實時感知放煤過程中垮落的煤巖類別,利用客觀真實的放煤數據判斷“關窗”時刻,是解決放煤過程中資源采出率與煤炭含矸率這一矛盾的關鍵。目前國內外學者開展了大量煤巖識別技術研究工作,提出了許多識別方法。利用振動技術識別煤巖是應用較多的一種技術,文獻[2]通過在放頂煤液壓支架尾梁上安裝振動傳感器采集尾梁振動信號,利用煤矸沖擊產生的信號進行煤巖識別。文獻[3]采用煤矸識別傳感器采集、分析、處理煤塊和矸石撞擊支架尾梁產生的振動信號,以能量值判斷煤塊和矸石的下落狀態。文獻[4]分析了振動信號的時域指標(峰峰值、方差和峰度指數),并根據時域特性識別煤巖。文獻[5]基于固定在液壓支架尾梁下的振動和聲學傳感器及信號處理技術,以煤巖沖擊液壓支架產生的獨特振動和聲學信號判斷煤巖混合狀態。但振動技術是通過液壓支架間接識別煤巖類別的,不同液壓支架振動模態不同,存在適應性不強等問題,不易推廣。文獻[6-7]根據煤矸不同的放射量確定閾值,進而識別煤巖類別,利用雙能γ射線技術確定煤矸混合體中的矸石含量。該技術因不同工作面煤巖放射量不同,無法通過統一的閾值進行判斷。文獻[8]根據放煤口拍攝的圖像,提出了基于圖像灰度直方圖和灰度均值的綜放工作面煤巖性狀識別方法。但圖像識別方法只能得到煤巖的表面特性,當煤巖在外觀上相似度較高時無法進行準確識別。為此,亟需引入一種能夠通過煤巖物質成分進行煤巖識別的技術。
研究人員將光譜技術引入煤巖識別領域。近紅外光譜屬于分子振動光譜的倍頻和主頻吸收光譜[9-13],物質的反射和吸收光譜特征能夠反映物質組成成分和結構等,是不同物質的“指紋”[14-15],能夠從成分層面對物質進行識別,為煤巖識別提供了可能。文獻[16-17]利用特征工程分別建立了遼寧鐵法礦區與山西塔山礦區煤巖的光譜特征,并基于特征閾值進行煤巖分類。雖然通過人為觀察光譜曲線而構建的特征針對性強,但對煤巖曲線多變的工況適應性較差,設置的閾值可能只適用于特定煤礦。文獻[18-20]利用無監督的余弦角算法與相關系數法對不同礦區煤巖光譜進行識別。無監督識別算法雖然可以度量2個向量方向與長度的一致性,但是2個向量必須有相同的維度,且無法適應橫向偏差。文獻[21-23]利用近紅外光譜建立隨機森林等機器學習與寬度學習系統等深度學習分類算法辨別煤巖。基于深度學習的算法識別準確性高,但計算量大,單次識別時間長。以上這些研究都是在靜態下采集光譜數據,然后進行離線識別,無法適應放頂煤作業時需要實時識別輸送機上高速移動煤巖的需求。
本文基于近紅外光譜技術研制了一種煤巖識別裝置,該裝置由數據采集與處理裝置和光源探頭一體化裝置2個部分組成,通過光源探頭一體化裝置搜集煤巖反射光,利用數據采集與處理裝置分析光譜數據,通過改進的煤巖識別算法,可在獲取到煤巖光譜曲線后立即分析光譜信息并判斷當前煤巖類別。實驗結果證明了該裝置在現場使用的可行性。
1 煤巖識別裝置研制
1.1 硬件系統
煤巖識別裝置硬件組成如圖1所示。數據采集與處理裝置主要由嵌入式工控機、近紅外光譜儀、繼電器等組成。光源探頭一體化裝置由光源、準直鏡頭組成。嵌入式工控機配備Intel Cherry Trail Z8350四核處理器、4 GB DDR3內存和256 GB固態硬盤;近紅外光譜儀采用AvaSpec-NIR512-2.5-HSC-EVO光譜儀,共有512個像元探測器,測量波長范圍為1 000~2 500 nm,光譜分辨率為3.2 nm,雜散光小于1.0%,可將反射光轉換為光譜數據。光源功率為400 W,波長范圍為350~2 500 nm,光源通過角度調節可在距離光源0.7 m處匯聚成直徑為65 mm的光斑。準直鏡頭的發射角為0.12°,可搜集距光源0.7 m處、直徑為40 mm圓形區域內的反射光。繼電器用于嵌入式工控機控制光源啟停。煤巖識別裝置的工作過程:嵌入式工控機控制光源照射到待測煤巖,準直鏡頭搜集待測煤巖的反射光,并經光纖傳輸到近紅外光譜儀。近紅外光譜儀將光信號轉換為光譜數據并傳輸到嵌入式工控機。嵌入式工控機利用煤巖識別算法對得到的光譜數據進行處理,判斷當前煤巖類別,并存儲光譜曲線。

圖1 煤巖識別裝置硬件組成Fig. 1 Hardware composition of coal rock identification device
1.2 軟件系統
煤巖識別裝置識別流程如圖2所示,主要包括3個步驟:光譜采集、煤巖識別和光譜存儲。首先預設3個光譜采集參數,分別為積分時間(單次掃描時近紅外光譜儀探測器暴露在光中的時間)、積分次數(形成單條光譜所需的掃描次數)與平滑次數(相鄰像素取平均的窗口大小),獲取緩存在近紅外光譜儀中轉換完成的波長及相應的輻射照度。然后判斷是否已經獲取校對數據,如果沒有則完成黑校對(暗條件下的輻射照度)與白校對(光源完全反射的輻射照度),利用校對數據計算全反射光譜數據并在識別界面(圖3)上顯示。利用選擇的煤巖識別算法結合標準光譜庫中的光譜曲線,對比實時光譜曲線與標準光譜庫中的光譜曲線,從而判別煤巖類別,并在界面輸出識別結果。裝置運行過程中會將采集的原始數據保存在數據庫中,便于后續對裝置結構與算法進行進一步優化。
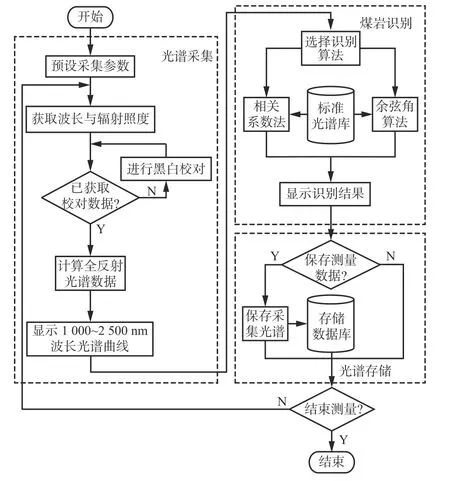
圖2 煤巖識別裝置識別流程Fig. 2 Identification flow of coal and rock identification device

圖3 裝置控制與識別界面Fig. 3 Device control and identification interface
1.2.1 標準光譜庫
為實現無監督的煤巖識別算法,需要建立標準光譜庫,通過計算實時光譜與標準光譜庫中所有光譜的相似度,對比得到相似度最高值對應的標準光譜曲線,以該條標準光譜曲線對應的煤巖類別確定實時光譜所屬的煤巖類別。為此從工作面獲取了不同的煤巖試樣創建標準光譜庫,煤巖類型、外觀特征、分布位置見表1,表1中包含了形態各異的煙煤試樣與不同種類的巖石試樣。從所有試樣中選擇其中26個最具代表性的煤巖,它們能夠表征其余同類別試樣的基本特征,采集它們的光譜曲線存儲于標準光譜庫中,結果如圖4所示,其中煤炭11條、巖石15條。近紅外光譜儀在邊緣波段電流噪聲較大,處理時只選取1 100~2 400 nm波段內數據。
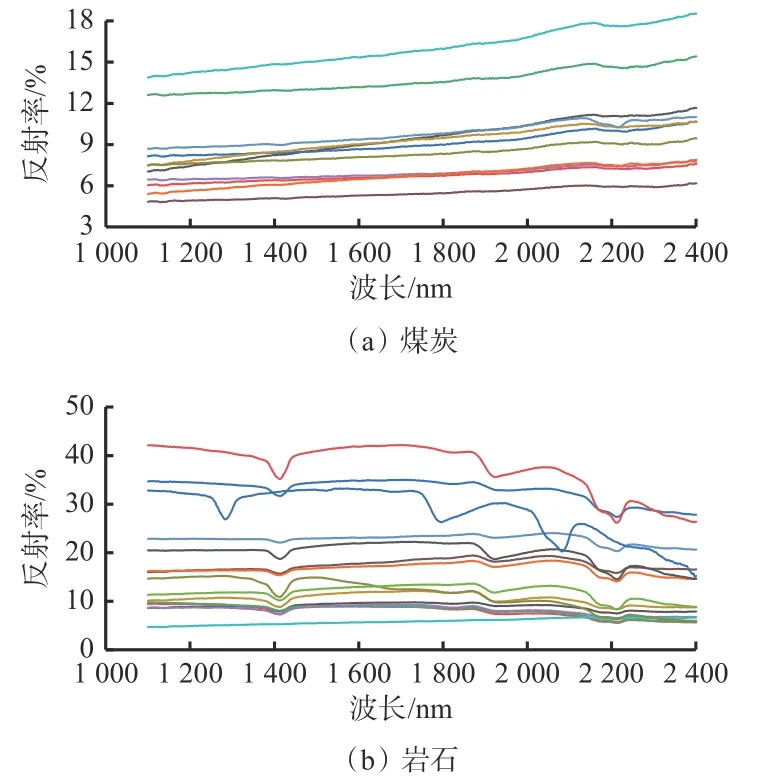
圖4 標準光譜庫中的光譜曲線Fig. 4 Spectral curves in the standard spectral library
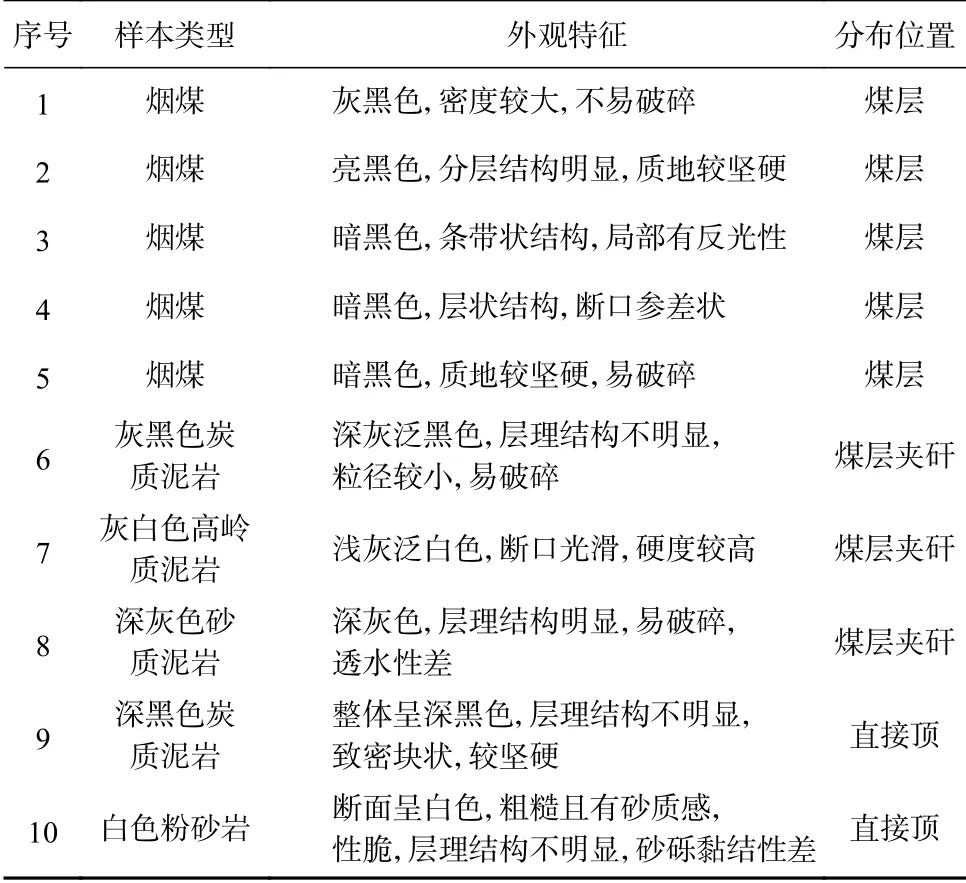
表1 煤巖類型、外觀、分布Table 1 Type, appearance and distribution of coal and rock
1.2.2 識別算法
本文采用余弦角算法和相關系數法進行煤巖識別,比較并選擇2種算法中煤巖識別效果較好的方法推廣到現場。余弦角算法是用向量空間中2個向量夾角的余弦值作為衡量2個向量間差異大小的度量[24],計算得到的廣義余弦值越大,2條光譜的相似度越高。其計算公式為

式中:D為2條光譜的廣義余弦值;a,b分別為實時光譜向量和標準光譜向量;xi和yi分別為實時光譜向量和標準光譜向量第i(i=1,2,···n,n為波長數)個波長點處的反射率。
相關系數法是用皮爾遜相關系數表示2個向量的相似度[21],計算公式為
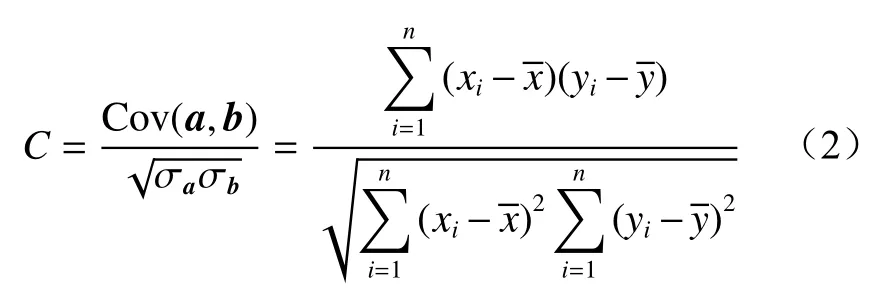
式中:C為2條光譜的皮爾遜相關系數; C ov(a,b)為實時光譜向量和標準光譜向量的協方差函數 ;σa, σb和x,y分別為實時光譜向量和標準光譜向量的標準差與均值。
皮爾遜相關系數C為在-1.0~1.0,越接近0則相關性越低,靠近1或者-1相關性強。
由于光譜采集時環境參數、光源壽命等都會對采集的光譜產生影響,會出現反射率偏移和波長軸彎曲的情況。反射率偏移是指相同種類煤巖在不同測量條件下波形相似但水平基線偏移。波長軸彎曲是指同種煤巖波形發生橫向移動導致波谷之間不能完全對齊。為提高波形的關聯性及識別的準確性,需要在降維的同時對細節誤差進行修復。光譜波形的形變如圖5所示。

圖5 光譜波形的形變Fig. 5 Deformation of spectral waveform
從余弦角算法和相關系數法(式(1)和式(2))可看出,待比較的2個光譜向量波長數必須相同,如果同一種煤巖類別的光譜向量,其特征吸收谷不在同一個波長位置處,則這種度量方式將無法得到2個光譜向量形態的相似性。為解決上述問題,提高煤巖識別的準確性,對煤巖識別算法進行改進。改進算法本質上不改變最終計算形態相似性的方法,在計算形態相似性之前對比較的向量進行少量偏移,增大特征吸收谷處的重疊區域。改進算法在不同步驟所形成的光譜如圖6所示。可看出改進算法識別后的標準光譜與實時采集光譜在特征吸收谷處重疊區域更多,為隨后的計算打下了很好的基礎。

圖6 改進識別算法處理后的光譜Fig. 6 Spectrum processed by improved Identification algorithm
具體計算過程如下:獲取實時光譜與標準光譜庫中任一光譜,對比前先進行分段插值,將原始光譜特征分為3段(1 400,1 900,2 200 nm附近),由于實際情況中光譜波長軸彎曲度為1~5 nm,有略小于光譜分辨率3.2 nm的部分,因此,對3段光譜數據分別進行線性插值,調整波長的分度值為1 nm,實時光譜分段后的3段數據分別記作A1,A2,A3,標準光譜庫中用于對比的光譜分段后的3段數據分別記作B1,B2,B3。 設A1=(rA1,rA2,···,rAk),B1=(rB1,rB2,···,rBk)(k為分段后該段波形的維數)。對A1和B1進行搜索,找出其中最小值rAo(1≤o≤k)和rBu(1≤u≤k)。計算波長軸彎曲度 Δ=u-o, 將B1循 環移位 Δ位 ,確保A1與B1中的最小值對應波長相同,然后將B1中的所有數據減去A1,B1最 小值的差值 δ=rAo-rBu,使B1與A1的最小值經偏移后相同,調整其水平基線在同一高度。對A2與B2、A3與B3做 同 樣 計 算,隨 后 將A1,A2,A3及B1,B2,B3分 別合并為A?和B?,用余弦角算法或相關系數法依次計算出實時光譜與標準光譜庫中所有標準光譜的余弦值或皮爾遜相關系數,排序找出最大余弦值或皮爾遜相關系數對應的標準光譜庫中的光譜,該條光譜對應的煤巖類別即為當前光照區域內的煤巖類別。
為驗證改進算法的識別效果,利用煤巖識別裝置采集不同試樣光譜曲線,試樣的類型、外觀特征、分布位置與表1相同,得到如圖7所示的102條光譜曲線,其中煤炭36條、巖石66條,分別用未改進與改進的識別算法對光譜曲線進行識別。

圖7 測試光譜曲線Fig. 7 Test spectral curves
未改進與改進識別算法識別正確率見表2,可看出未改進識別算法誤分波形概率較高,原因是余弦角算法與相關系數法識別時都必須維數相同且存在一一對應關系,受向量平移影響較大,波長軸彎曲會大幅降低正確率;改進算法正確率明顯高于未改進算法,誤分波形比例降低。

表2 未改進算法與改進算法識別正確率比較Table 2 Identification accuracy comparison between unimproved algorithm and improved algorithm
為進一步提高識別算法的準確性,通過設置不同的識別波段與標準光譜庫大小進行識別,確定最優的算法參數。
(1) 識 別 波 段。不 同 的 巖 種 在1 400,1 900,2 200 nm 附近形成的吸收谷寬度不同,因此,不同特征提取寬度也將影響識別正確率。為驗證特征寬度對識別正確率的影響,分別采用波段1(1 250~1 550,1 750~2 050,2 050~2 350 nm),波段2(1 300~1 500,1 800~2 000,2 100~2 300 nm),波段3(1 350~1 450,1 850~1 950,2 150~2 250 nm)這3種寬度形式,用2種算法識別圖7中的曲線,標準光譜庫大小為26,試驗結果見表3。

表3 不同特征提取寬度下識別結果比較Table 3 Identification results comparison under different feature extraction width
結合表3與圖7可看出,對于波段1,由于特征分布較分散并受近紅外光譜儀性能影響,在曲線兩端對光接收效果較差,造成信噪比較低而降低識別準確性;波段3雖然特征集中,提高了準確率,但是特征區域單一,對特征模糊的巖石識別易出現偏差;波段2的寬度適合于大多數煤巖樣本,在該波段識別準確率最高,它兼顧了特征的分布特性與數據降維程度。
(2) 標準光譜庫大小。標準光譜庫中不同種類光譜的數量同樣影響識別的準確性,但更多的光譜將降低識別的實時性,為探究標準光譜庫大小對識別時間和正確率的影響,在2種識別算法下用4,13,20,26這4種不同大小的標準光譜庫,以1 300~1 500,1 800~2 000,2 100~2 300 nm組合波段的形式識別圖7中的光譜曲線,試驗結果見表4。
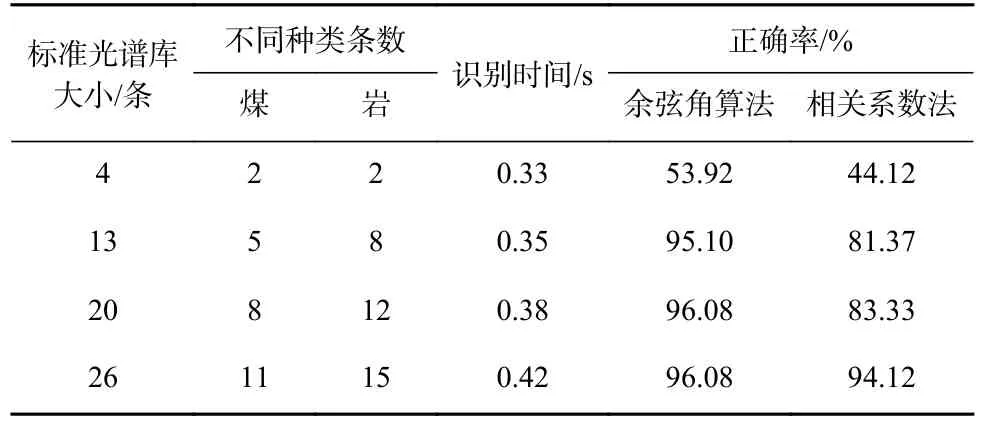
表4 不同大小標準光譜庫識別結果比較Table 4 Identification results comparison of different sizes standard spectral library
從表4可看出,標準光譜庫大小與識別正確率正相關,由于圖7中光譜曲線的煤巖種類較多,吸收谷寬度不同,當標準光譜庫較小時,其他種類煤巖曲線會與當前曲線匹配得到最大值。識別時間對標準光譜庫大小不敏感,增加標準光譜庫中光譜數量對實時性影響不大。在實際應用中受多種因素影響,光譜變化較大,因此有必要增加標準光譜庫中光譜曲線數量。為實現在較短時間內得到較高的準確性,標準光譜庫大小為26比較合適。
2 實驗與測試
2.1 實驗室實驗
2.1.1 光譜采集參數確定
不同的光譜采集參數對于光譜質量有很大的影響,為了探究該影響規律,在實驗室搭建了模擬試驗臺。為使最終光譜采集參數更具有泛化性,選擇了5種能基本表征不同煤巖大類的試樣:泥質灰巖、氣煤、炭質砂巖、無煙煤和粉砂巖。模擬試驗臺與煤巖擺放實物如圖8所示,模擬試驗臺采用滑臺移動光源的方式,通過數控程序控制光源在樣本上方0.6 m處以0.3 m/s的速度左右移動;采用直線滑臺的電動機編碼器檢測光源移動距離,平臺上間隔放置煤巖樣本。
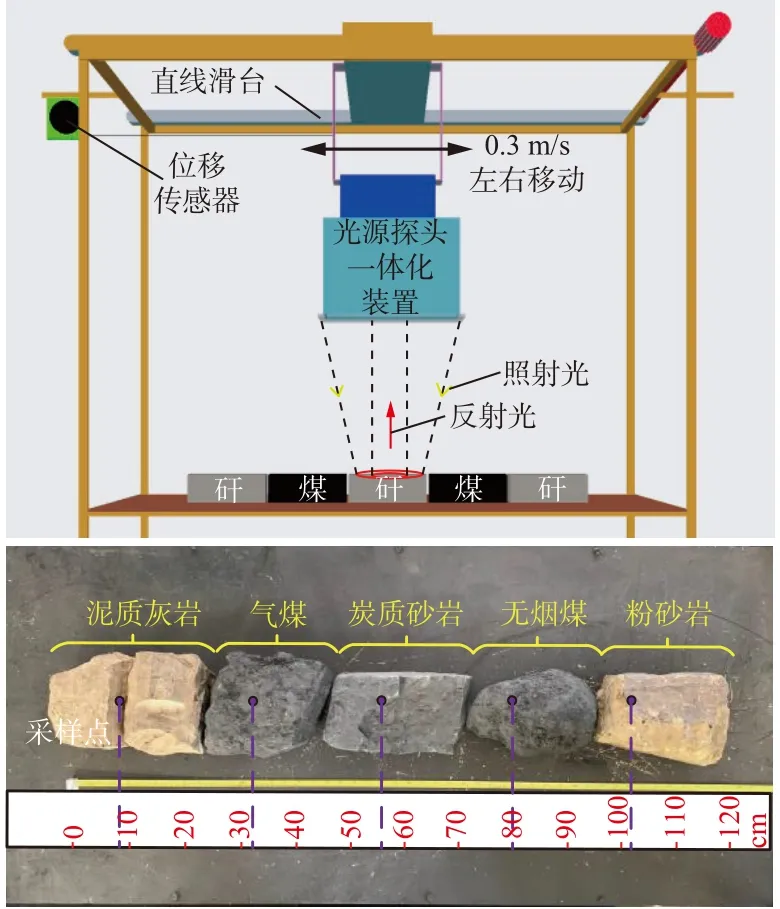
圖8 模擬試驗臺與煤巖擺放實物Fig. 8 Simulation test bench and physical map of coal and rock placement
設置采集參數如下:采樣積分時間為30 ms,積分次數為4,平滑次數為3。在每個煤巖試樣上分別選擇1個采樣點,各采樣點位置如圖8所示,分別在90,330,560,800,1 020 mm。由于采集時光源是從左往右移動,為了使采集區域位于每種試樣中心,采樣點設置偏向于每種試樣的左側。實驗時分別改變積分時間、積分次數、平滑次數,觀察光譜曲線變化,并采用余弦角算法識別,光譜曲線上有●表示識別結果正確,有▲表示識別結果錯誤。
不同積分時間下獲取的光譜曲線如圖9所示。可看出積分時間為5 ms時,每個點采集的光譜曲線都不平滑,波動比較嚴重,吸收谷特別不明顯,甚至被噪聲覆蓋,識別算法對積分時間為5 ms下的光譜數據無法準確判斷。積分時間為30 ms時,每個點采集的光譜與預設點處相同,除炭質砂巖外,其他試樣的吸收峰比較明顯,炭質砂巖區域光譜曲線吸收谷非常弱,與煤炭在該段波長處的光譜曲線非常相似。積分時間為75 ms時,光譜曲線吸收谷特征有所減弱,此時近紅外光譜儀已經接近飽和,無法吸收更多的光子。
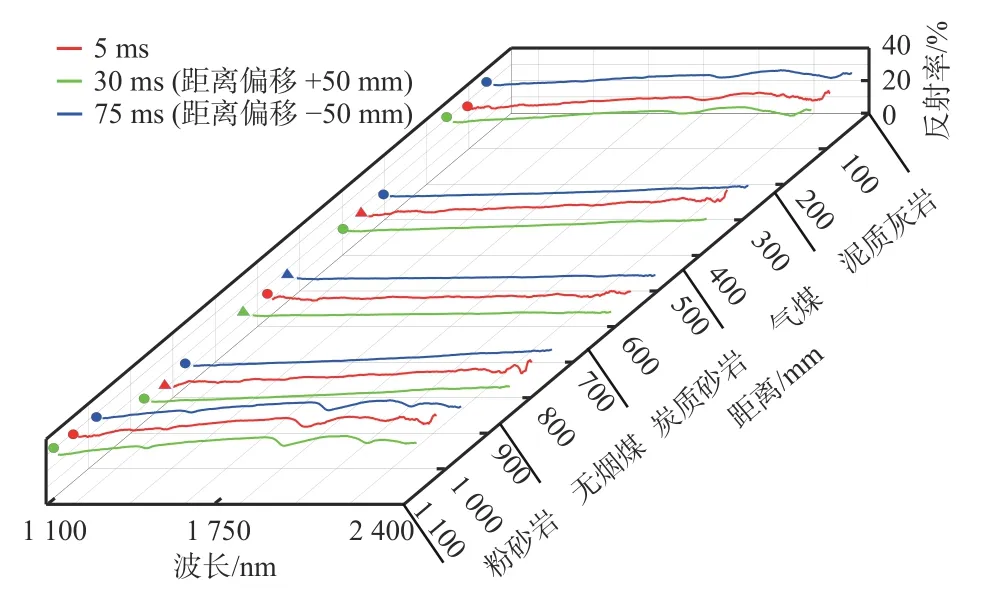
圖9 不同積分時間下獲取的光譜曲線Fig. 9 Acquired spectral curves under different integration times
積分時間越長,同一波長下獲得的輻射照度越大,動態下采集距離變長,積分時間是5,30,75 ms時,實際采集距離分別為3,18,45 mm,實際采集距離是預設點之后的一段區域。積分時間增加導致探測區域增大,由于探測煤巖樣本并不是均質且表面有高低變化,探測距離的增大會引入更多的噪聲,進一步降低光譜數據的信噪比。動態采集中積分時間主要參考光源的光照強度,當光照強度較大時,可設置的積分時間最小值較小,但可設的最大值也較低。本實驗中設置積分時間下限為10 ms,上限為75 ms。當低于下限或超過上限會出現波形喪失的情況,因此,煤巖識別裝置安裝位置處光照條件較好時,為實現更佳的識別效果和更好的實時性,積分時間設置為比下限略高5~10 ms最佳。
不同積分次數下獲取的光譜曲線如圖10所示。可看出積分次數為1時,各采集點得到的光譜曲線質量都很好,巖石的吸收谷明顯且深度較大,各條曲線都能夠正確識別。積分次數為3時,部分光譜曲線出現異變,炭質砂巖識別錯誤。積分次數為9時,巖石光譜曲線吸收谷略微變淺,識別準確性下降。積分是為了減少偶然變化影響,取多條光譜進行平均,因此動態采集過程中,積分次數越多,則采集距離越長。積分次數在1,3,9下采集距離分別是6,18,54 mm。采集距離增大同樣會引入更多的噪聲,進一步降低光譜數據的信噪比。綜放工作面對煤巖識別的實時性要求高,且放煤過程中煤流速度較快,為提高煤巖識別裝置識別頻率,積分次數應越少越好,設置為1最佳。

圖10 不同積分次數下獲取的光譜曲線Fig. 10 Acquired spectral curves under different integration numbers
不同平滑次數下獲取的光譜曲線如圖11所示。可看出平滑次數為0時,曲線全波段有細微鋸齒狀,但吸收谷明顯,預設點處采集的煤巖光譜曲線基本能正確識別;平滑次數為3時的曲線明顯優于0時,曲線上沒有鋸齒狀波動,但在光譜特征不明顯的炭質砂巖區域,本該是巖石的光譜曲線吸收谷消失;平滑次數為8時,由于平滑次數過大,吸收谷被當作噪聲平滑掉一部分,但仍可進行正確的識別。

圖11 不同平滑次數下獲取的光譜曲線Fig. 11 Acquired spectral curves under different smoothing times
設置平滑次數是因為環境光、暗背景并非恒定不變,采集過程中環境光的改變會使曲線出現細微鋸齒狀,通過平滑可以消除鋸齒。平滑次數并不影響曲線的采集距離。圖11中平滑次數為0時得到的光譜曲線信噪比較低,平滑次數為3時光譜曲線質量更好。平滑次數主要參考環境波動快慢,只需設置為可消除環境光變化即可,過多的平滑次數會模糊吸收谷,降低識別的正確性。
2.1.2 動態下識別算法檢驗
選擇表1中的不同樣本順序布置于試驗臺上,讓光源探頭一體化裝置相對于煤巖試樣以0.4 m/s的速度不斷移動,動態采集煤巖光譜曲線,如圖12所示,總計46條光譜曲線。利用改進的識別算法對采集到的光譜曲線進行識別,結果見表5。可看出余弦角算法在動態識別下正確率大幅下降,而相關系數法則能維持在較高的水平,原因可能是動態移動下采集的光譜特征被減弱,而相關系數法可消除量綱的特點起到了放大特征的作用。因此,綜合考慮識別算法靜態和動態識別特性,當將煤巖識別裝置部署于工作面時,采用改進相關系數法。
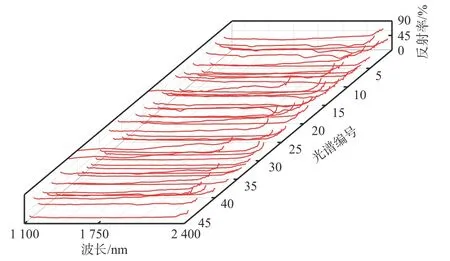
圖12 動態采集下煤巖光譜曲線Fig. 12 Coal and rock spectrum curves under dynamic acquisition

表5 動態采集下煤巖識別正確率Table 5 Accuracy of coal and rock identification under dynamic acquisition
2.2 現場測試
2.2.1 煤巖識別裝置現場安裝
為驗證該煤巖識別裝置現場使用的可行性,選擇在山西大同市某煤礦綜放工作面進行現場試驗。該綜放工作面平均走向長為2 644.5 m,傾向長為230.5 m,煤層厚度為8.17~29.21 m,平均煤層厚度為15.76 m。煤為黑色、半亮型煤,煤層中含夾矸2~17 層,單層厚度為0.05~0.82 m,夾矸巖性多為炭質泥巖、高嶺巖、粉砂巖等。煤巖識別裝置樣機如圖13所示,裝置現場安裝如圖14所示,將光源探頭一體化裝置安裝于端頭支架外側,安裝時光源照射方向垂直向下,使探照區域落在輸送帶的中線上,數據采集與處理裝置放置于1號液壓支架立柱間。光源探頭一體化裝置和數據采集與處理裝置之間連接的電源線與光纖通過液壓管道卡槽固定。
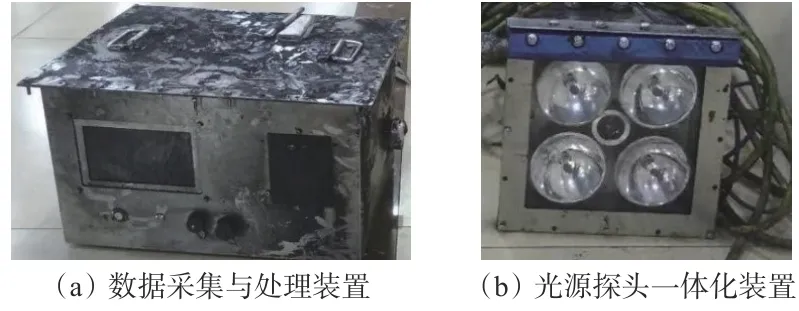
圖13 煤巖識別裝置樣機Fig. 13 Prototype of coal and rock identification device
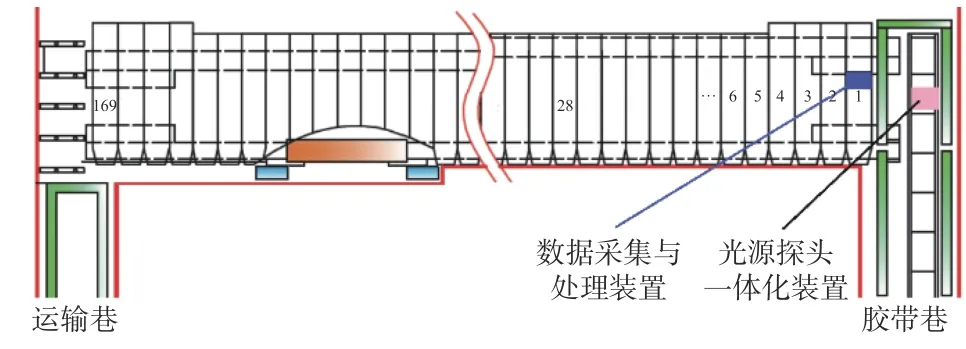
圖14 煤巖識別裝置現場安裝Fig. 14 Installation of coal and rock identification device on-site
2.2.2 測試結果與分析
利用煤巖識別裝置采集完整放煤過程中放落煤巖的光譜數據,結果如圖15所示。綜放工作面采集的光譜曲線受多種因素影響而存在波動,呈細微鋸齒狀,光譜數據信噪比較低,同時考慮工作面粉塵濃度大、環境濕度高等外界因素,加之頂板來壓不穩定,光源受其擾動影響,反射率偏低。可看出400 s之前曲線較為平緩,沒有明顯的特征吸收谷,400~600 s時有吸收谷的曲線間歇性出現,600~850 s時曲線重新變得平滑,850 s后曲線全都是有吸收谷的形態。
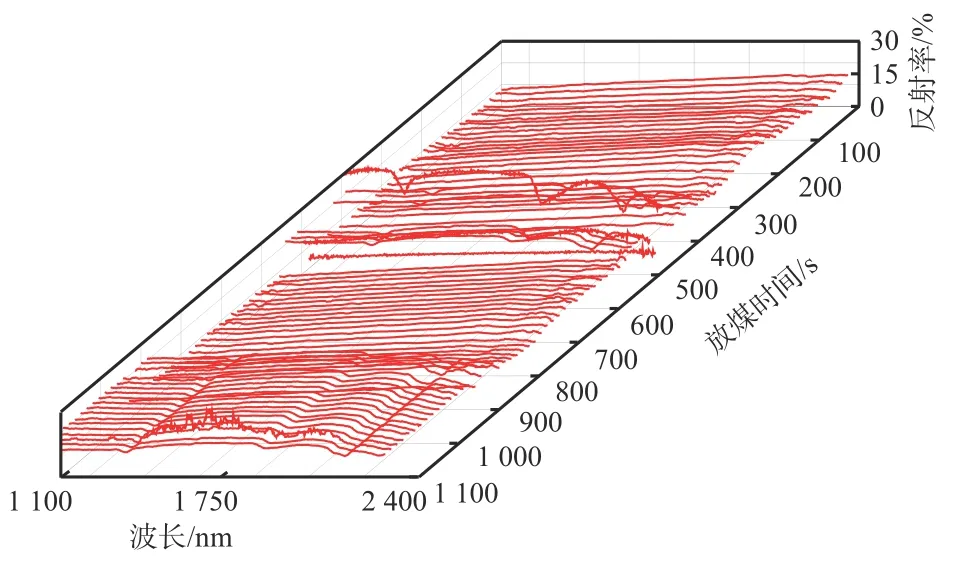
圖15 現場光譜曲線Fig. 15 On-site spectrum curves
圖16為現場利用改進相關系數法得到的識別結果。可看出0~400 s時為完全放煤狀態,400~600 s時存在夾矸現象,600~850 s又開始放煤,850 s以后放煤結束,矸石開始流出,識別結果與圖15中觀察到的光譜曲線變化一致,基本符合放煤-夾矸-放煤-全矸的放煤規律,這個結果從側面說明改進的識別算法能夠較為準確地對光譜曲線進行識別。

圖16 現場煤巖識別效果Fig. 16 Identification effect of coal and rock on-site
3 結論
(1) 研制了一種近紅外光譜煤巖識別裝置。其由數據采集與處理裝置和光源探頭一體化裝置組成,通過光源探頭一體化裝置搜集煤巖反射光,利用數據采集與處理裝置分析光譜數據。利用煤巖識別裝置內部署的改進識別算法,可在獲取到煤巖光譜曲線后立即分析光譜信息并判斷當前煤巖類別。該裝置具有采集、識別和存儲功能,可實現放煤過程中煤巖的實時識別。試驗結果證明了該裝置在現場使用的可行性。
(2) 通過對比原始識別算法與改進識別算法測試光譜的正確率,證明改進相關系數法可使實時光譜與標準光譜庫光譜的特征吸收谷重疊區域更多,誤分波形比例降低。探究了不同特征波段和標準光譜庫大小對識別準確度的影響,認為1 300~1 500,1 800~2 000,2 100~2 300 nm特征寬度適用于大多數煤巖樣本,標準光譜庫大小與正確率正相關,采集動態光譜有必要增加標準光譜庫中曲線數量,相關系數法相比于余弦角算法在動態識別中效果更好,識別正確率為91.3%。
(3) 通過探究不同光譜采集參數對光譜質量的影響規律,得到了光譜采集參數的設置準則:積分時間設置主要參考光源的光照強度,當采集條件較好時積分時間設置為比下限略高5~10 ms最佳;考慮綜放工作面對煤巖識別的實時性要求高且放煤過程中刮板輸送機上煤巖變化較快,積分次數設置為1最佳;平滑次數主要參考環境波動快慢,只需設置為可消除環境光變化即可。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
當代陜西(2019年8期)2019-05-09 02:22:48
上海建材(2019年1期)2019-04-25 06:30:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
家庭影院技術(2018年4期)2018-05-09 07:07:52
專用汽車(2016年4期)2016-03-01 04:13:43
質量與標準化(2015年9期)2015-12-31 11:41:40
中國質量與標準導報(2014年4期)2014-03-11 19:54:25
中國質量與標準導報(2014年10期)2014-02-28 22:25:47
中國質量與標準導報(2014年7期)2014-02-28 22:24:39
