基于屬性描述的零樣本滾動軸承故障診斷
2022-08-16 08:48:30趙曉平呂凱揚張中洋
振動與沖擊 2022年15期
趙曉平, 呂凱揚, 邵 凡, 張中洋
(1.南京信息工程大學 計算機與軟件學院,南京 210044;2.南京信息工程大學 江蘇省網絡監控中心,南京 210044;3.南京信息工程大學 自動化學院,南京 210044)
機械故障診斷是對工業生產設備進行維護的最佳途徑,故滾動軸承故障診斷[1]是現今工業生產過程不可或缺的任務。因滾動軸承長期處于連續工作狀態且工作環境極其惡劣,故很容易發生故障[2]。一旦滾動軸承損壞,輕則導致機器故障延誤生產,重則造成重大事故甚至出現傷亡。因此,對滾動軸承的工作狀況進行監測,確認已發生的故障類型并及時做出相應的零件更換具有重要意義[3]。
隨著科技的不斷創新以及大數據技術的不斷發展,大量軸承運轉狀態的監測信息被記錄下來。因此,以數據驅動方式為根本的故障診斷方法被學術以及工業領域廣泛運用。而在實際數據采集環境中,通過頻繁停機檢查確定故障類型費時費力,故需通過試驗臺采集已知故障信號從而對實際工作環境中的未知故障進行診斷。傳統的滾動軸承故障診斷方法主要采用時頻分析方法,通過對振動信號的故障特征進行降維和提取,進而獲取故障診斷結果。蔡艷平等[4]結合經驗小波變換與同步壓縮小波變換進行圖像的紋理特征提取,有效地降低了振動信號間的交叉干擾,提高了故障診斷的準確率。李勇發等[5]考慮到故障檢測方法泛化能力較弱的問題,提出了融合支持向量數據描述與小波奇異譜的滾動軸承故障檢測方法,通過db5小波對信號分解后進行篩選,最后通過支持向量數據描述訓練,有效地實現了滾動軸承故障診斷。但是,傳統的故障診斷方法過分依賴于專家知識,容易造成誤判,且面對數據量日益增大的機械診斷任務,很難高效地完成診斷工作。
近年來,深度學習技術迅猛發展,在圖像識別與分割、自動駕駛、目標風格變換等方向都得到了廣泛運用。卷積神經網絡(convolutional neural networks, CNN)作為深度學習中的一類模式分析方法,因其強大的自適應特征提取能力以及學習能力,越來越多的學者和專家將其運用到故障診斷領域。趙曉平等[6]提出了一種基于多任務深度學習模型的診斷方法,針對單標簽系統會忽視復合故障之間關系的情況,引入了多標簽系統,從而實現了對多故障情況的準確分類。湯保平等[7]考慮到齒輪箱內部各個零部件的振動信號重疊嚴重的問題,提出了一種多共振分量融合CNN,得到了不錯的分類效果。針對傳統的旋轉機械故障算法抗干擾性差,無法準確提取故障特征的問題,Shao等[8]提出了一種基于遷移學習的對抗域自適應方法,對故障特征利用最大均方差和域混淆函數進行域間自適應,實現了跨域故障診斷。但是,深度學習故障診斷模型大多是以數據驅動的方式來對模型進行訓練,通過試驗臺采集的數據進行模型訓練,往往導致訓練出來的故障診斷模型可遷移性較差。在實際生產過程中,因為工況不同、生產環境復雜等原因,出現的故障種類不可預測,這可能會導致無可用的測試類樣本進行故障診斷模型的訓練。因此,為了解決上述問題,筆者結合零樣本學習(zero-shot learning, ZSL)的思想,在無測試類樣本可供訓練的情況下完成對未知類故障的診斷工作。
ZSL[9]由Palatucci和Hinton等于2009年提出,該方法在模型的學習過程中,訓練集和測試集沒有交集。ZSL模型在使用非測試類的樣本進行訓練后,通過屬性遷移、語義輸出編碼、跨模態遷移[10]等方法,仍能對測試類進行準確的分類。Norouzi等[11]構造了一個圖像分類模型,通過類標簽將圖像映射到語義空間中,從而在不需要對測試類進行額外訓練的情況下,完成圖片分類任務。Verma等[12]建立了一個基于概率編碼器的ZSL框架,減小了預測的偏差,在ZSL常用的公開數據集上都得到了不錯的結果。然而上述幾個ZSL的試驗中,試驗對象往往是物品或者動物等,而將零樣本圖像識別的方法遷移到故障診斷方向時,這些物品的屬性并不適用于工業傳感器信號,因此在進行零樣本滾動軸承故障診斷任務時,需要更加有代表性的故障屬性信息來輔助識別工作。
針對零樣本故障診斷問題,Feng等[13]采用了一種基于故障描述的屬性遷移方法,從而實現了對TEP數據集故障的準確診斷,該方法使用良好的語言描述代替樣本來進行診斷和識別各種故障,然而該模型完成特征提取任務的主成分分析方法(principal component analysis,PCA),需要大量的先驗知識才可以最優化保留特征維數,故提取的特征往往不能很好地代表訓練和測試樣本。針對上述問題,筆者從屬性描述的角度出發,提出了一種結合Xception網絡[14]與CNN的零樣本滾動軸承故障診斷方法,即X-CNN故障診斷模型。本方法憑借對現有固定故障類型的屬性學習,完成在工業場景下對未見類故障的識別工作,以此擺脫對共享故障類型的依賴,從而令使用范圍更加廣泛。該方法采用Xception網絡對故障信號時頻圖進行特征提取;根據故障類別的屬性描述構建屬性矩陣,使用CNN對提取的特征進行屬性學習;最后通過屬性矩陣的相似度比較完成故障診斷工作。
1 理論基礎
1.1 ZSL
傳統的機器學習采用大量具有標簽的數據進行有監督學習,現如今人們已經不滿足這種繁瑣的學習方式,于是針對一些尚未獲得大量訓練數據的新類型,或者需要消耗繁雜、巨大的人力物力才能獲得足夠訓練數據的對象,提出了一種零樣本學習方法[15]。
ZSL衍生于遷移學習[16],但是卻與普通的遷移學習方法有著很大的區別:在ZSL的訓練過程中,訓練集樣本類型和測試集是沒有交集的[17]。ZSL模型通過對其他已知類別的學習,完成對未知類的識別。這一過程常常搭建直接屬性預測(direct attribute prediction,DAP)模型來進行分類工作。DAP的結構圖如圖1所示。
圖1中:D1,D2,…,DK為訓練類數據;DK+1,DK+2,…,DK+M為測試類數據;y={ε1,ε2,…,εN}為不同類型訓練數據的屬性向量。通過對屬性學習器α1,α2,…,αz的訓練,完成對數據屬性的預測,從而得到輸入數據的特征估計,最終進行分類判斷,其分類過程如式(1)
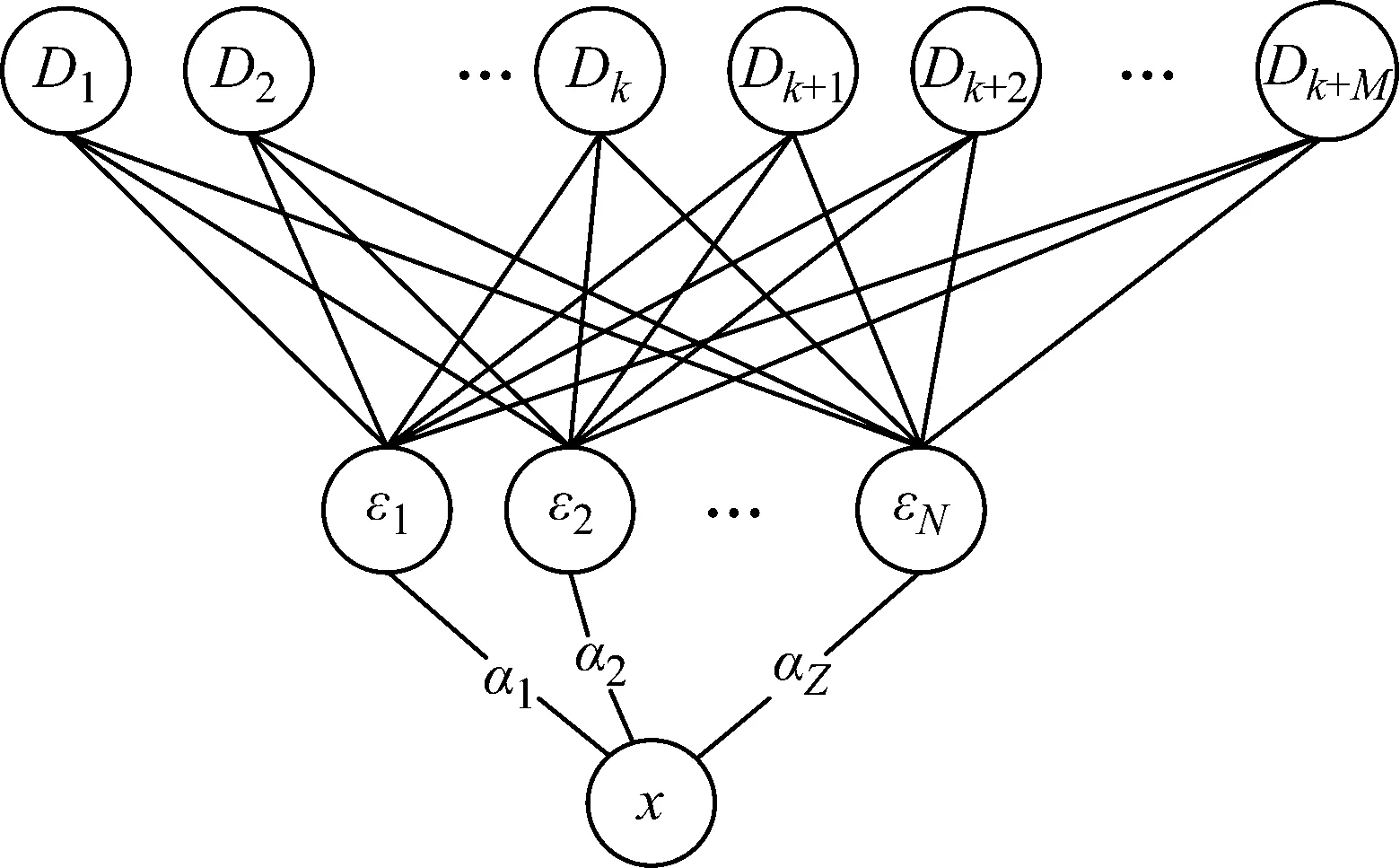
圖1 直接屬性預測模型
(1)
式中:M為數據包含的屬性數目;εn,l為l類屬性的第n個分量;p(εn,lx)為輸入數據x的特定屬性包含的概率;P(εn,l)則為對該類特定屬性的先驗估計。
1.2 Xception網絡
Xception網絡是一種將有殘差連接的深度可分離卷積層進行線性堆疊的深度學習模型,Xception網絡將Resnet中的卷積層模塊替換為極致的Inception模塊[18],極致的Inception模塊對輸入先進行了普通的卷積操作,然后對1*1卷積后的每一個通道分別進行3*3的卷積操作,并在最后將結果concat,該過程如圖2所示。Xception網絡在原網絡的基礎上提高了網絡的運行效率,在不增加網絡復雜度的情況下改善了模型的效果。
2 X-CNN故障診斷模型
X-CNN模型通過對已知類故障樣本的學習,完成對未知類故障樣本的診斷。這一過程分為兩個階段:第一階段采用Xception特征提取網絡對樣本進行特征提取;第二階段使用基于CNN的屬性學習器完成對特征的屬性學習以及預測,并最終通過相似度度量獲得具體的故障診斷結果。
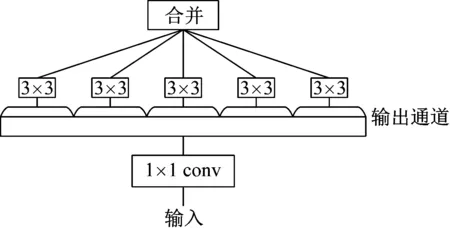
圖2 Inception模塊
2.1 Xception特征提取網絡
X-CNN模型選用Xception網絡進行時頻圖特征提取。Xception網絡通過36個卷積層來進行基礎的特征提取,其引入了Entry flow,Middle flow和Exit flow 3層,每個flow都有若干個conv_bn模塊或者sep_bn模塊。本模型刪除用于輸出的Exit flow,Xception特征提取網絡結構如圖3所示。
(1) Entry flow
Entry flow共進行了8次卷積,其作用是對輸入振動信號時頻圖進行下采樣,減小空間維度。其中的con_bn層將卷積層與批歸一化層(batch normalization,BN)結合,sep_bn層將可分離卷積層與BN層結合。這一改進省去了整個BN層的計算量。BN層計算過程如式(2)。
(2)


圖3 Xception特征提取網絡結構圖
(2) Middle flow
Middle flow將3個可分離卷積層重復運算8次以不斷學習通道間的關系,實現特征的優化,即圖3中Middle flow模塊內部的虛線連接處。再將原網絡中的Exit flow中的部分模塊添加至Middle flow,在完成特征優化后流向sep_bn層和conv_bn層,進行特征的匯總和整理后,將多維特征輸出。
2.2 基于CNN的屬性學習器
基于屬性描述的零樣本滾動軸承故障診斷方法需要對提取的特征進行屬性預測,因CNN采用局部連接和權值共享的方式,可以有效地降低權值的數量,使得網絡易于優化,從而很好得完成特征提取與多分類任務[19],故選用CNN作為特征圖的屬性學習器。
基于CNN的屬性學習器由特征提取層和預測分類層組成,其網絡結構如圖4所示。
(1) 特征提取層
特征提取層由卷積層、池化層組成[20]。卷積層和池化層對輸入數據的特征進行提取。卷積的過程中,使用矩形的卷積核對輸入對象的每一個像素點進行卷積計算,同一輸入對象共享權重。卷積計算過程如式(3)
fi+1=Wi?fi+bi
(3)
式中:fi為卷積運算的輸入;fi+1為卷積過后產生的特征圖;Wi為權重;bi為偏置值;?為卷積運算符。通過卷積操作,會增加輸出的特征圖個數,這將導致輸出維度不斷增大,造成維度災難,故通過添加最大池化層的方式降低輸出維度并保留主要特征,最大池化的過程對輸入特征的紋理較為敏感,其過程見式(4)。
Max-pooling(f[i-1],f[i],f[i+1])=
max(f[i-1],f[i],f[i+1])
(4)
通過將卷積層和池化層進行堆疊,不斷降低參數量,與此同時獲得感受野的提升,該過程見圖4特征提取層結構。卷積池化層后使用ReLU激活函數,使得原先的單一線性變化多樣化,從而增強學習能力。
(2) 預測分類層
預測分類層中用全連接層將提取的所有主要特征合并,并將其輸送至SoftMax分類器,經過全連接層或者池化層輸出可得一個k行j列的矩陣Yk*j,其中:k為樣本數量;j為j個類別對應的量化值。對于輸入樣本x以及其對應的標簽y,可以用q(y=jx)表示y屬于j類別的概率,Softmax函數的公式為
(5)

圖4 基于CNN的屬性學習器網絡結構
2.3 X-CNN故障診斷流程
圖5為X-CNN故障診斷流程圖,由圖5可以看出X-CNN故障診斷模型由數據預處理階段、特征提取階段、屬性學習及分類階段組成。
(1) 數據預處理階段
隨機選擇凱斯西儲大學原始振動信號,按照ZSL的思想(訓練類樣本在測試類樣本中均不出現),對數據集進行訓練集和測試集的劃分,劃分比例為22∶5。對所選取的訓練集和測試集,分別進行短時傅里葉變換(short-time Fourier transform, STFT)得到振動信號時頻圖。
(2) 特征提取階段
對模型進行訓練時,將訓練集時頻圖作為樣本輸入到Xception網絡訓練,對其進行特征提取,訓練直至網絡收斂,從而獲得時頻圖的特征并將訓練完畢的Xception網絡保存。將測試集信號時頻圖輸入到訓練完畢的Xception特征提取網絡,通過Entry flow完成對時頻圖的下采樣以及降低維度后,經Middle flow完成對特征的不斷優化,得到訓練集和測試集的特征圖并輸出供屬性學習器使用。
(3) 屬性學習及分類階段
將訓練階段中由訓練集得到的特征圖傳入到屬性學習器{α1,α2,…,αM}中,對其M個屬性分別訓練對應的屬性學習器。測試階段,將測試集特征輸入屬性學習器中,獲得測試樣本的屬性預測矩陣,并將測試集樣本的屬性預測矩陣與數據集屬性表進行相似度度量,從而診斷最終的故障類別。

圖5 X-CNN故障診斷流程圖
3 試驗分析
為驗證所提方法對未知類故障的診斷能力,試驗中選用真實的滾動軸承數據,數據選自凱斯西儲大學(Case Western Reserve University, CWRU)的滾動軸承數據集。
3.1 數據預處理
CWRU數據集的采集試驗臺如圖6所示。裝置主要由3個部分組成:位于最左側的1.5 kW的驅動電機、位于中間的扭矩傳動裝置、位于最右側的功率測試機。加速度傳感器分別安裝在試驗電機的基座處、風扇端、驅動端的電機外殼處,從而獲得基座加速度數據(base accelerometer data, BA)、風扇端加速度數據(fan end accelerometer, FE)、驅動端加速度數據(drive end accelerometer data, DE)。同時,CWRU通過電火花加工技術在滾動軸承三處布置單點故障,分別是內圈故障(InnerRace)、外圈故障(OuterRace)和滾動體故障(Ball),并且選用0.17 mm,0.35 mm,0.52 mm,0.7 mm的不同故障體量級別。除此之外,外圈故障還區分為外圈3點鐘,外圈6點鐘和外圈12點鐘三處損傷點。

圖6 CWRU試驗臺
在試驗中屬性描述為判斷某種故障屬性是否出現,按照不同故障類型的故障位置(內圈故障、外圈3點鐘方向故障、外圈6點鐘方向故障、外圈12點鐘方向故障、滾動體故障)、電機負載0,0.75 kW,1.5 kW,2.25 kW、故障大小0.17 mm,0.35 mm,0.52 mm,0.7 mm等信息定義其屬性。
根據選用的數據集,定義了13種不同的屬性(如表1所示),其中包括4種故障尺寸屬性、4種運行負載屬性、5種不同故障位置屬性。試驗從驅動端數據中根據5種不同的故障位置、4種不同的工作負載和4種故障的損傷尺寸選取了共計27類故障數據進行試驗,按照不同滾動軸承狀態選取的不同故障類別數及其樣本數如表2所示。
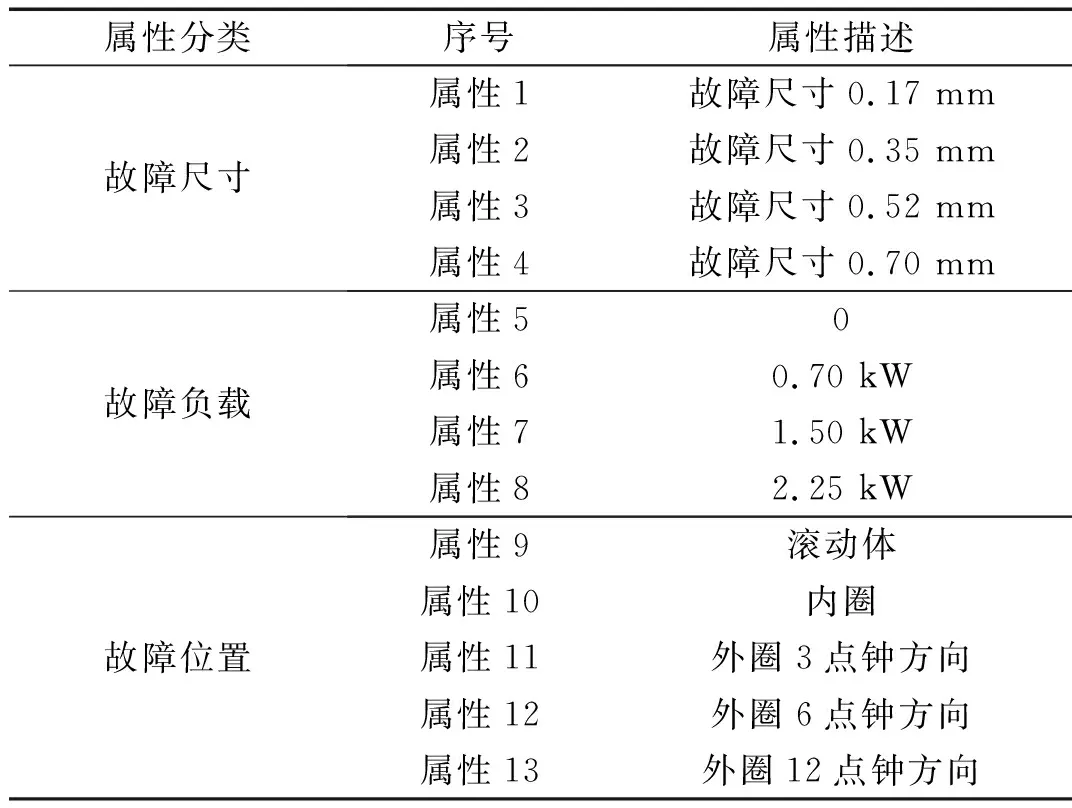
表1 屬性描述對應表

表2 故障類別數及樣本數
其中無故障狀態因本試驗存在3種負載故選擇3類,外圈故障因其包含更多類故障位置故選擇10類,滾動體和內圈故障選擇7類,共計27類故障。
對選取的故障類型定義數據編碼,數據編碼代表故障的發生位置、尺寸以及機器的運行負載:對于故障位置,正常類型為N,滾動體故障為B,內圈故障為IR,外圈故障為OR;故障類型后的兩位數字代表故障尺寸。如“OR07@3_0”代表外圈故障,故障尺寸0.17 mm,且負載為0,故障位置為外圈3點鐘方向。表3展示了從CWRU數據集中,選取用作試驗部分的屬性描述在向量空間中的配置,共計27種故障。表3中:“1”表示該故障具備該屬性;“0”表示該故障不具備該屬性。通過對3種不同的屬性類型,共計13種屬性的學習,可以實現在不使用測試類故障樣本進行訓練的情況下,完成對測試類故障的診斷分類工作。
將選取的振動信號數據隨機劃分為訓練集、測試集,其序號如表4所示。
在對CWRU所提供的振動信號進行預處理時,考慮到選取的特征提取網絡在對圖像處理方面有著優異的表現,故先采用STFT將故障信號數據轉變為時頻圖,從而獲得其隨時間變化的頻譜信息。在STFT中使用Hanmming窗作為窗函數并且預設窗函數長度為256,窗重疊度為50%,采樣頻率設為120 kHz。
3.2 試驗與結果對比分析
3.2.1 特征提取網絡效果分析
對時頻圖進行特征提取是基于屬性描述的零樣本滾動軸承故障診斷方法的第二步,本試驗中分別使用有監督的機器學習方法PCA、改進后的Xception特征提取網絡來提取時頻圖的相關特征,特征提取網絡的主要參數見表5。表5中Entry flow和Middle flow中的殘差連接conv_bn步長相同,卷積核大小分別為1×1和3×3,池化過程都選擇最大池化,padding方式為“same”,大小為3×3,步長為2。其余sep_bn和conv_bn的卷積核大小皆為3×3,各自的步長如表5所示。
設置對比試驗時,需對選定機器學習方法參數進行設置。在進行特征提取時,選用的PCA方法,保留前20個主要特征。屬性學習階段選用經典機器學習分類方法,即支持向量機(support vector machine, SVM)、概率樸素貝葉斯(naive Bayesian, NB)和隨機森林(random forest, RF)進行屬性學習。對PCA提取的20個主要特征,使用SVM,NB和RF進行屬性學習器的訓練。其中SVM的懲罰系數C設為1,NB中不設先驗概率大小,利用極大似然法進行計算,RF的決策樹數設為50。
X-CNN故障診斷網絡通過Entry flow和Middle flow完成對時頻圖的特征的逐步提取,特征提取網絡的末端添加一個Softmax層,并設置網絡的損失函數如下
(6)

訓練集和測試集的分類準確率和Loss值見圖7和圖8,試驗結果表明,Xception網絡可以很好的提取時頻圖特征并進行分類工作。如圖7所示,在訓練階段,當iteration達到1 000次時,在訓練集上模型的分類準確率已經達到99.5%,Loss值已經降到了0.348,在這之后模型訓練的分類準確率和Loss值的變化趨勢逐漸平緩。如圖8所示,在測試階段,當進行到第1 000個iteration時,模型的分類準確率已經達到99.6%,Loss值降到了0.298,在這之后準確率和Loss值保持穩定。由此可見若是只對可見類進行分類,Xception網絡可以很好地完成任務,從而說明了Xception網絡具有極強的分類能力。
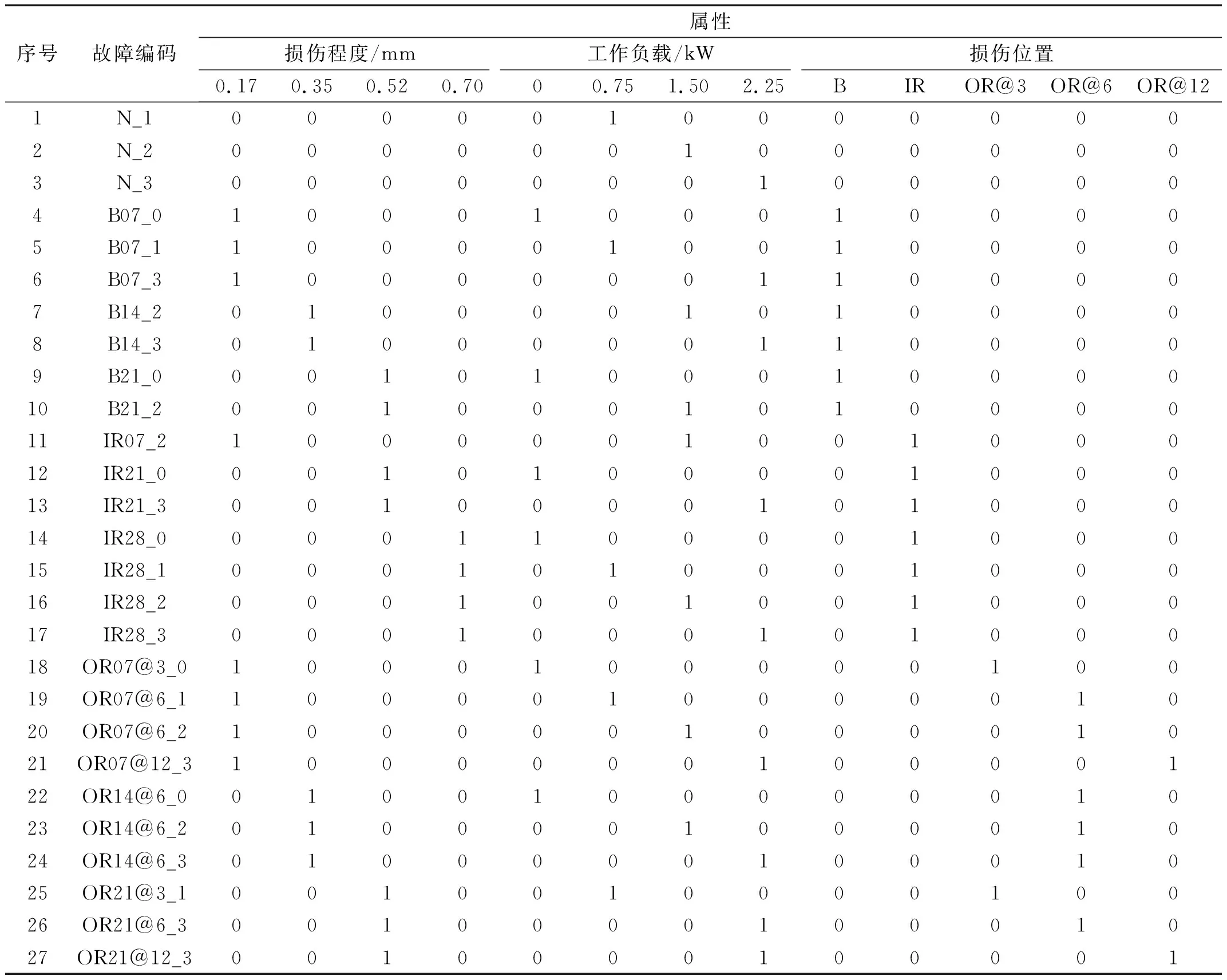
表3 CWRU數據集屬性表

表4 訓練集、測試集劃分
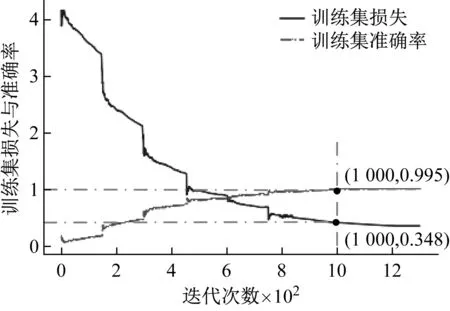
圖7 訓練集準確率與Loss值
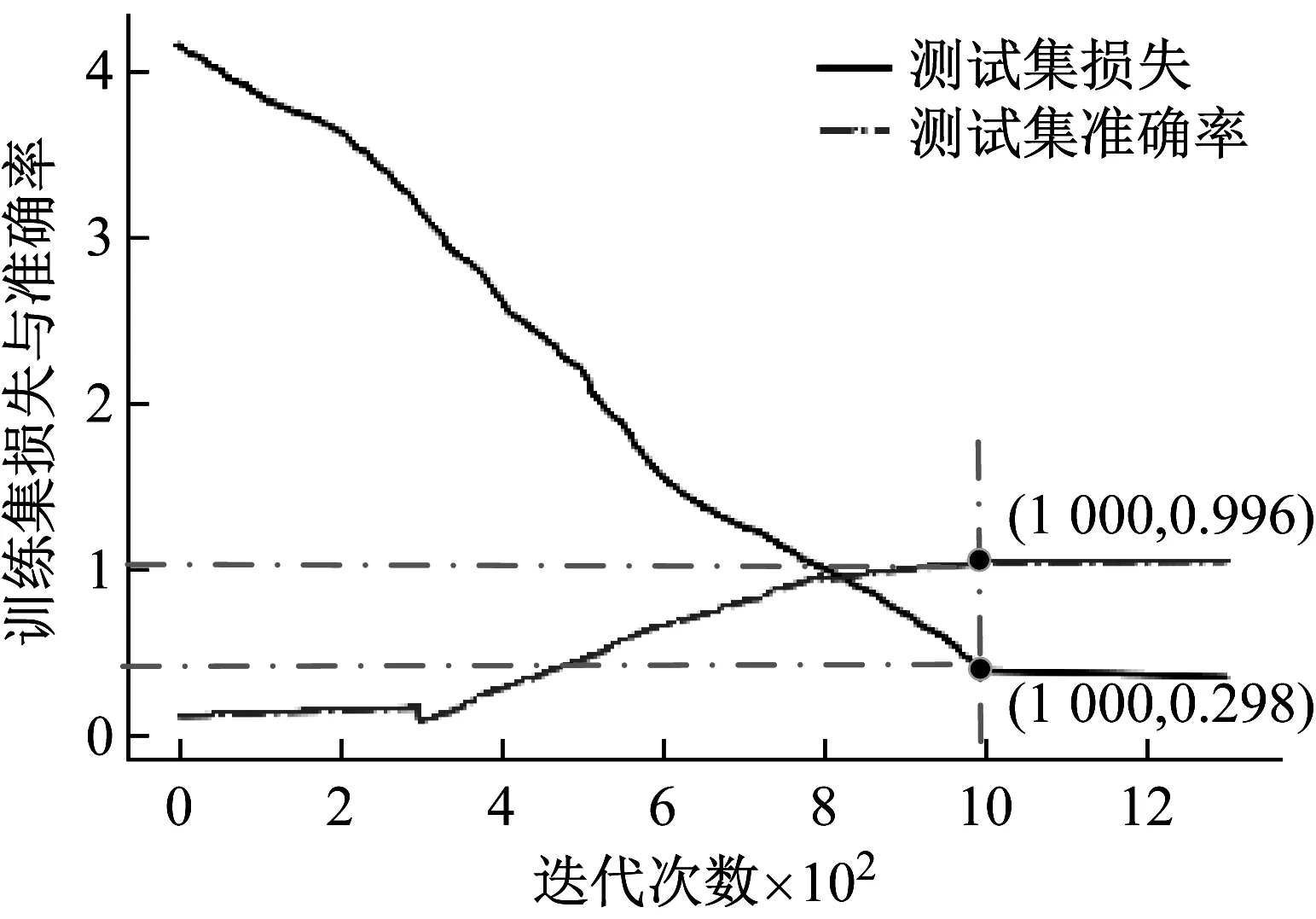
圖8 測試集準確率與Loss值
為了驗證Xception網絡是否具備優異的特征提取能力,本試驗使用t-SNE方法將提取的多維特征降維后投影到二維空間中進行可視化分析,若投射結果可分性好,則可以說明該方法的特征提取能力強。本試驗隨機選取了7種故障對其進行特征提取并且降維可視化,使用PCA方法以及Xception特征提取網絡進行特征提取后,特征降維可視化的結果如圖9和圖10所示。通過觀察圖9可以發現使用PCA方法進行特征提取后,負載為2.25 kW、損傷尺寸0.17 mm和負載為1.5 kW、損傷尺寸0.52 mm的滾動體故障發生了混淆,即圖9中圓圈劃出部分,故PCA特征提取方法對不同故障尺寸與負載的滾動體故障區分能力較弱。而觀察圖10可以發現使用Xception網絡提取的特征可分性極好,各種不同位置、尺寸、負載的故障類型特征可分性極強,特征分類無混淆。故相較于使用PCA進行特征提取的方法,Xception網絡可以更好得進行特征提取。
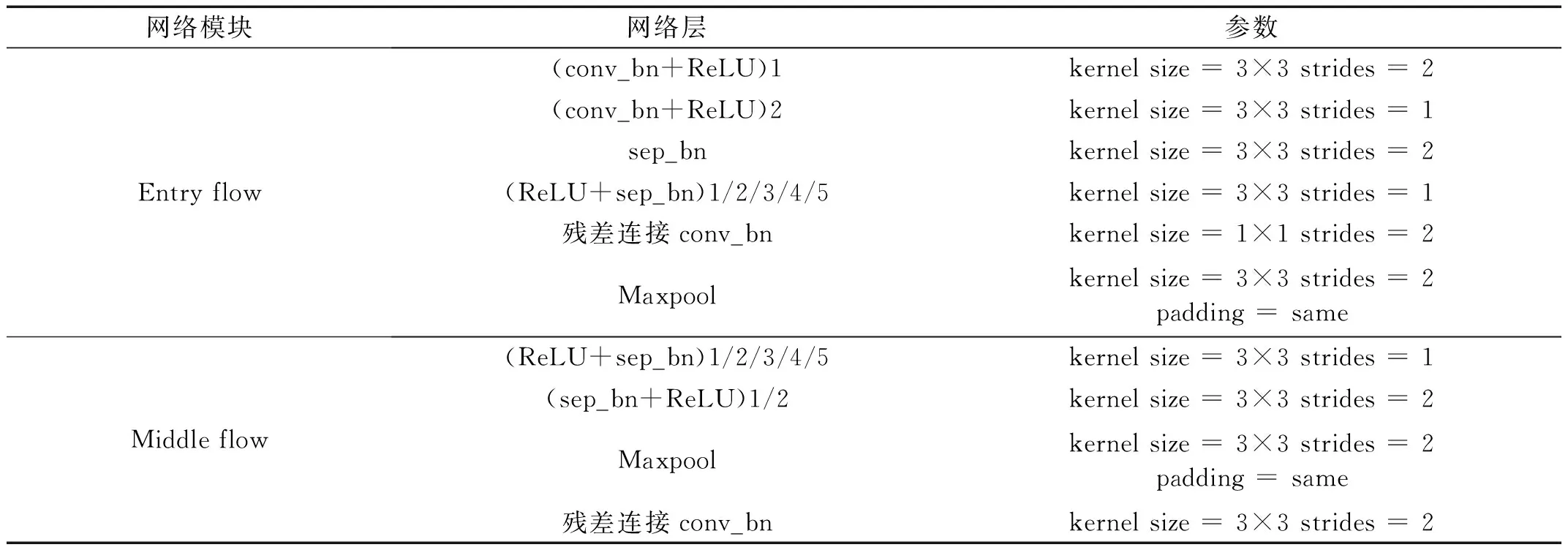
表5 特征提取網絡主要參數
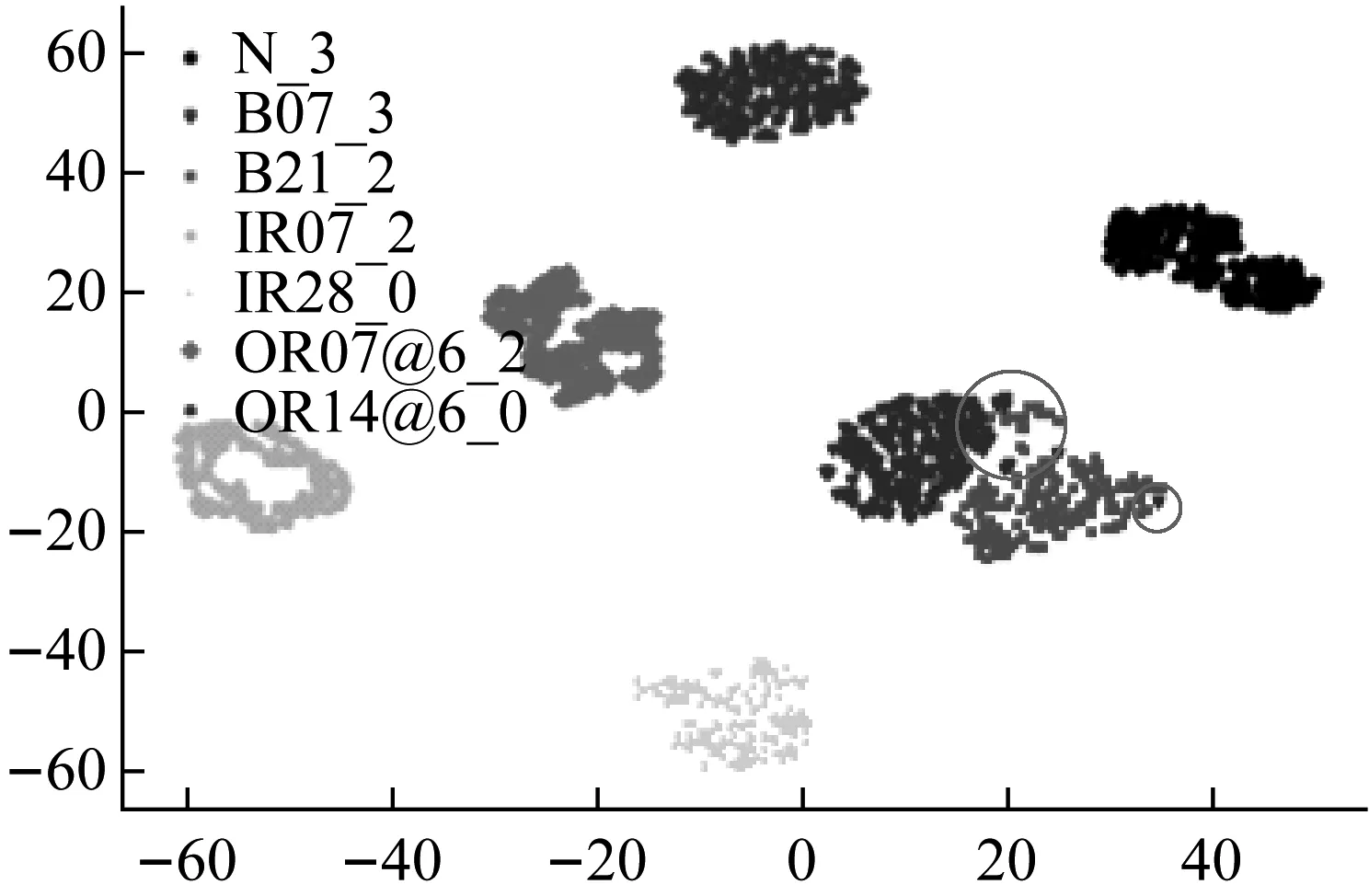
圖9 PCA特征提取降維可視化
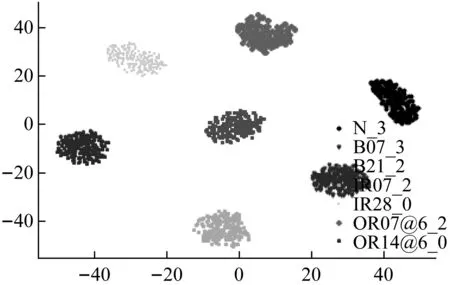
圖10 Xception網絡特征提取降維可視化
3.2.2 屬性學習器效果對比
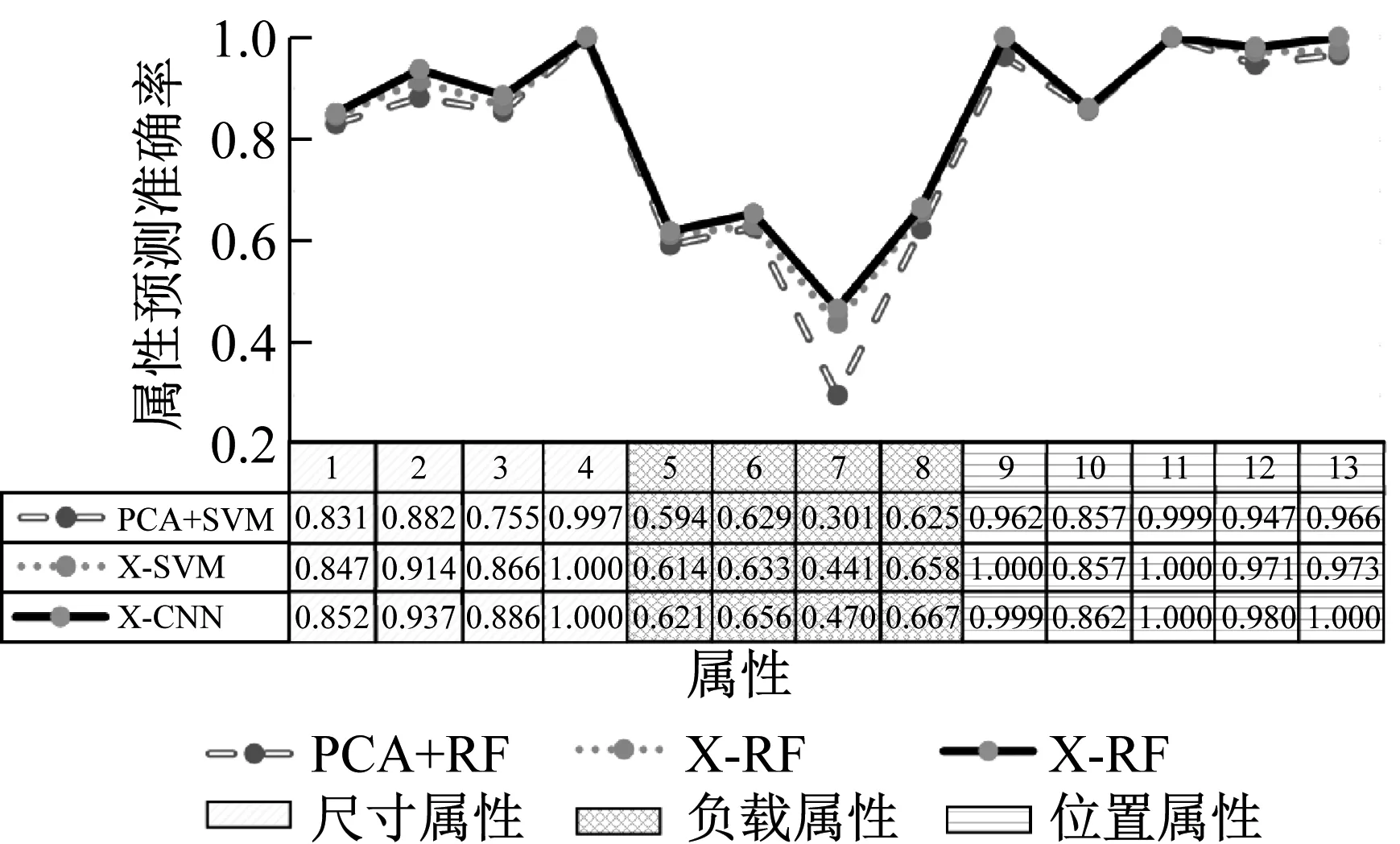
使用CNN作為屬性學習器對提取的特征圖進行屬性預測,所搭建的CNN網絡參數如表6所示。考慮到Softmax通過自然底數e使得輸入差異擴大,然后使用配分方式將結果歸一化為概率分布,具有優異的分類效果,故選用Softmax作為最終全連接層輸出的分類函數。此外,屬性學習器選用Adam作為優化器,選用categorial crossentropy損失函數。使用訓練完畢的屬性學習器對其進行屬性預測,從而評估其屬性學習的準確率。將屬性矩陣傳入學習器,分別預測13種屬性在多種不同故障類型種是否存在。使用PCA方法與Xception網絡提取特征后使用不同屬性學習器進行屬性學習,其準確率如圖11所示。
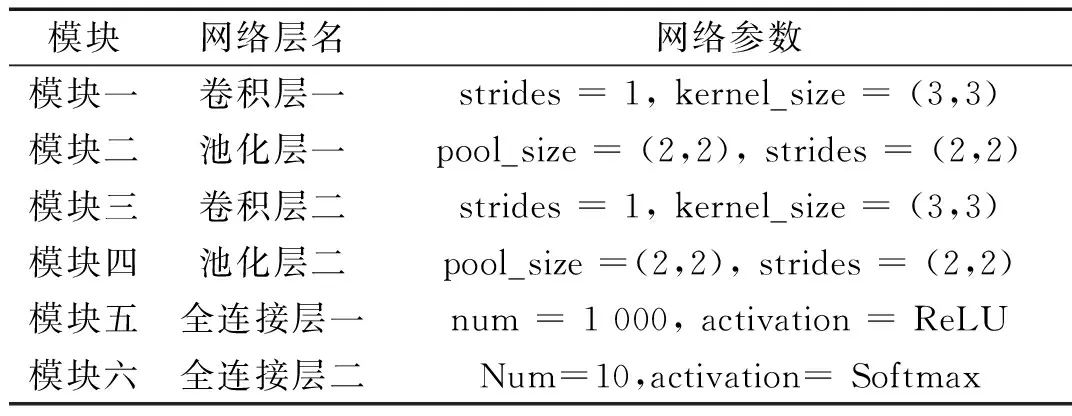
表6 CNN參數
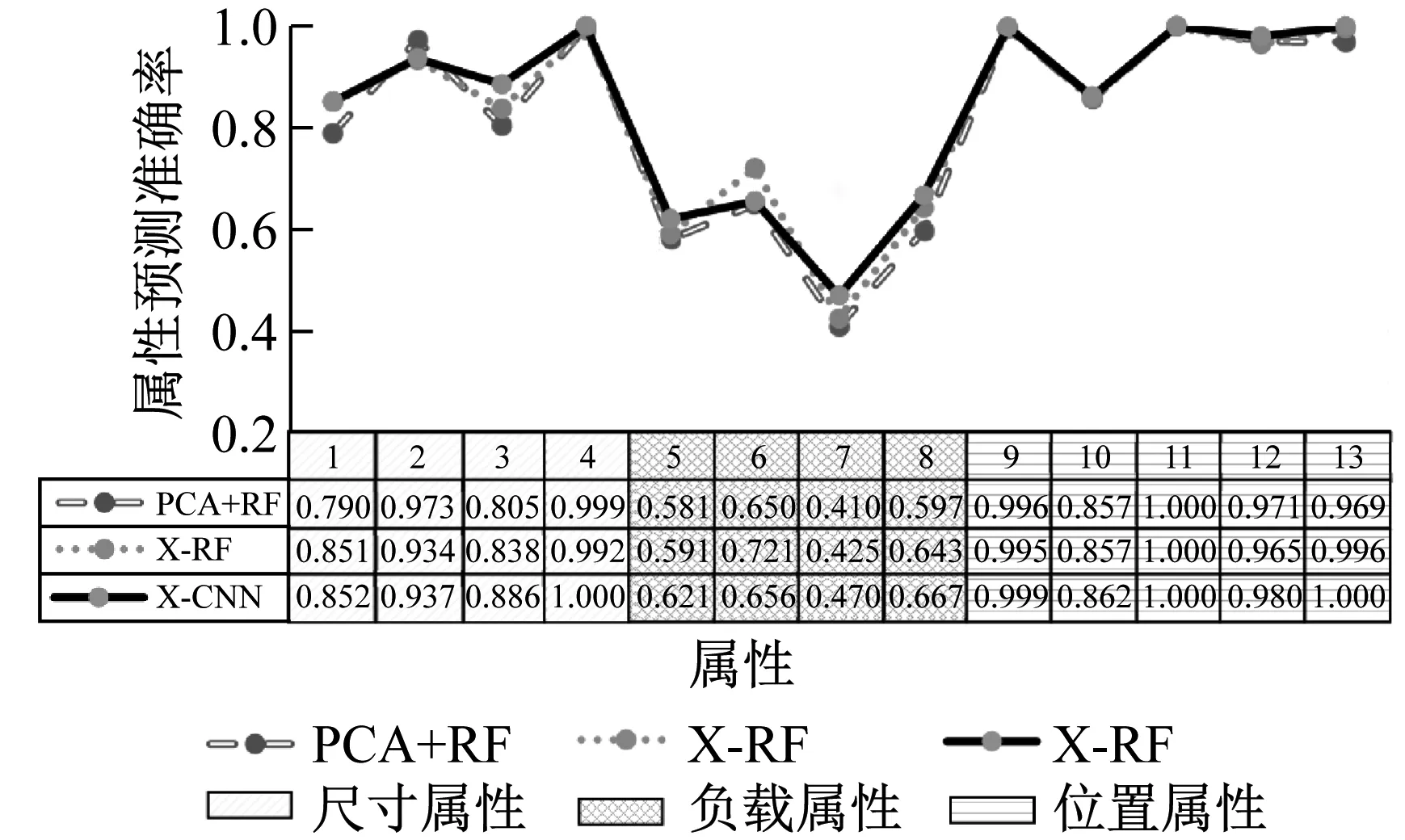
由圖11可知,X-CNN模型對故障尺寸(屬性1~4)、故障位置(屬性9~13)的屬性學習準確率高,最低的屬性預測準確率可達75.4%。在對屬性1~4與屬性9~13進行分析時,觀察圖11(a)可知,使用X-CNN進行屬性學習的準確率優于PCA+RF或者X-RF,最高預測準測率可達100%,最低預測準確率可達85.2%。X-CNN對屬性的預測準確率明顯優于使用傳統方法;由圖11(b)可知,使用X-NB對多數屬性的預測準確率都高于PCA+NB,而X-CNN對所有屬性的預測準確率都高于X-NB;觀察圖11(c)可知,使用X-SVM進行屬性預測的準確率優于使用PCA+SVM進行屬性預測,而使用X-CNN對所有屬性的預測準確率皆優于X-SVM。相對于內圈故障和滾動體故障,X-CNN模型對外圈故障的屬性識別率尤其優秀,針對3點鐘方向和12點鐘方向的外圈故障屬性學習的準確率都達到了100%,對0.7 mm的故障屬性識別準確率也達到100%。觀察圖11可以發現,本方法對振動信號的負載屬性(即圖中的屬性5,6,7,8)的識別能力均較弱,準確率均在50%左右。可見本方法對于負載的識別能力較弱,分析原因是相同故障狀態的滾動軸承在變負載條件下,數據特征分布差異較小,這一情況增加了區分難度。為減小這類特征分布差異所帶來的問題,可以使用度量學習方法,或者使用triplet loss損失函數,加大相似特征之間的分布差異,從而提高區分度。這一情況為接下來的研究學習提供了方向。
(a) X-CNN與RF方法下屬性學習準確率比較

(b) X-CNN與NB方法下屬性學習準確率比較
(c) X-CNN與SVM方法下屬性學習準確率比較
3.2.3 零樣本分類結果分析
為保證試驗過程的合理性和真實性,對所選擇的數據集進行測試集和訓練集的隨機劃分,其中訓練類故障樣本與測試類故障樣本無交集,樣本序號和故障類型的對應情況可見表3。對測試集進行故障類別診斷過程中,考慮到過小的K值會造成過擬合,而過大的K值會增大學習的近似誤差,故通過交叉驗證法確定最優K值為K=7,并且選用歐氏距離作為度量標準。
表7展示了使用Xception網絡和PCA方法進行特征提取后,配合不同屬性學習器,在不同數據集上的分類準確率。由表7可知,使用Xception提取特征后進行屬性學習并進行故障診斷,相較于使用PCA方法,無論是使用SVM,RF還是NB作為屬性學習器,都可以獲得更高的分類準確率,最高達到了82.6%,而使用PCA作為特征提取器時,在5組試驗中準確率最高的PCA+RF也只有59%,平均準確率最高僅僅55.92%。此外,相對于使用機器學習方法作為屬性學習器,使用CNN作為屬性學習器時可以獲得更高的分類準確率,單次分類的準確率最高達到了88.5%,平均準確率達到了86.5%,可見X-CNN模型對于各種故障屬性、故障位置、故障大小的滾動軸承故障進行診斷時魯棒性較強。

表7 分類準確率
圖12展示了對數據集A使用Xception進行特征提取后,運用不同屬性學習器進行故障診斷的混淆矩陣。圖12中,縱坐標代表了測試樣本的真實類別,橫坐標表示模型預測的類別,橫縱坐標交點代表預測的準確率。圖12(a)中X-CNN模型的平均準確率達到了88.2%,診斷準確率最低的故障類型也可達到83%,遠高于其他使用PCA作為特征提取方法后得到的結果,相比于圖12(b)~圖12(d)中其他使用Xception網絡作為特征提取網絡的方法,CNN對屬性學習的準確率比SVM(82.6%)、RF(73.4%)、NB(76.2%)等機器學習方法更高,圖12(c)與圖12(d)方法對于測試集中的各種不同種類的故障,均存在較高的識別錯誤率,平均準確率僅76.6%與74.2%。比較圖12(a)與圖12(b),可以發現,X-SVM模型的識別精度相當高,但是對于某種特定的故障類型識別效果一般,最優診斷結果與最差診斷結果誤差可達36%,而X-CNN方法最優準確率可達100%,最低可達83%,結果誤差僅17%。可見X-CNN模型對各種不同的故障種類在零樣本情況下分類的魯棒性更高。


(c) X-RF診斷結果混淆矩陣
4 結 論
本文提出的X-CNN方法由Xception特征提取網絡和基于CNN的屬性學習網絡組成。通過對特征的提取以及屬性的學習,實現了由故障特征空間到故障屬性空間的映射,進而在無測試類樣本可供訓練的情況下完成故障診斷工作,試驗結果表明:
(1) 經過Xception網絡提取的故障特征,相較于PCA等傳統機器學習方法,可以更好得代表故障信號,且通過該方法提取的故障特征可以為屬性學習過程提供優質的輸入。
(2) 通過將CNN和其他3種傳統機器學習方法(SVM,RF,NB)構成的屬性學習器比較可知,基于CNN的屬性學習器可以更加準確得進行屬性學習工作且具備更強的魯棒性。
(3) 所構建的X-CNN故障診斷模型以多種屬性作為輔助信息,將特征的分類轉化為對不同屬性的識別,屬性共享于不同的故障種類之間,從而進行由故障特征空間到故障屬性空間的映射,通過對屬性的學習可以高效且準確地完成故障診斷任務。
綜上,X-CNN故障診斷模型能夠完成在零樣本條件下的故障診斷工作,適用范圍更廣且魯棒性強,為解決可供訓練數據類別不足而導致的特征學習不充分的模型訓練問題提供了新的思路。
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
河南科技(2014年23期)2014-02-27 14:19:15
