射彈高速入水尾拍載荷和彈道特性的數值研究
2022-08-17 11:24:00王曉輝孫士明
船舶力學 2022年8期
王曉輝,李 鵬,孫士明,張 珂
(中國船舶科學研究中心 水動力學國家重點實驗室,江蘇 無錫 214082)
0 引 言
超空泡射彈的高速入水過程,是其由空中彈道進入水中彈道的一個重要的過渡環節。自彈體接觸自由液面瞬間,到形成超空泡水下航行狀態,由于涉及流動介質突變引起的入水沖擊,以及入水空泡發展、包覆狀態改變引起的水動力變化,射彈的入水載荷形式較為復雜。
在射彈高速入水載荷研究方面,蘇軼龍[1]在考慮水的可壓縮性基礎上,對射彈垂直入水過程進行了數值研究,研究表明,基于不同的載荷形成機理,射彈垂直入水載荷先后表現為入水沖擊載荷與入水水動力載荷特征。進而,陳晨等[2]、孟慶昌等[3]對射彈垂直入水后超空泡航行狀態的水動力進行了數值模擬研究,并獲得了與Serebryakov等[4]、易文俊等[5]試驗研究相一致的結果。
射彈擾動運動狀態下高速入水,通常還會伴隨射彈的尾拍及水動力載荷的變化。Hrubes[6]通過超空泡射彈水下發射試驗,對射彈超空泡狀態下的尾拍彈道穩定機理進行了研究。孟慶昌等[7]、趙成功等[8-9]對射彈水下超空泡航行狀態的尾拍特性及射彈結構參數、初始擾動的影響進行了一定的研究。
基于射彈入水、水中彈道的相關性,本文重點對伴隨尾拍的射彈垂直入水過程開展數值模擬研究,以獲得射彈的尾拍水動力載荷、尾拍彈道運動特性,并在尾拍對射彈水彈道的影響分析基礎上,對其水彈道性能進行評估。
1 數值計算方法及驗證
1.1 入水的耦合歐拉—拉格朗日求解方法
有限元的顯式動態求解方法是由模擬高速沖擊等高速動力學問題發展而來,特別適用于瞬時的,包含接觸、碰撞行為的非線性動力學問題的模擬。通過引入描述水動力學行為的狀態方程,并結合可用于自由液面捕捉的CEL(coupled Eulerian-Lagrangian analysis)分析技術,使得射彈高速入水過程也能夠通過顯式動力學方法進行求解。
本文基于CEL 方法的入水數值模擬,采用接觸算法捕捉入水空泡的形態演化。空氣域采用不考慮質量、強度的真空材料(void material)加以模擬;水介質采用Hugoniot 形式的米埃—格林愛森(Mie-Gru?neisen)狀態方程描述其體積響應,采用牛頓黏性剪切模型描述其黏性剪切響應。
Hugoniot形式的Mie-Gru?neisen狀態方程表述為

牛頓黏性剪切模型為

式中,S為應力偏量,e?為應變率偏量,γ?= 2e?為工程偏應變率,μ為動力黏度。
本文射彈高速入水問題中,水介質線性Us-UpMie-Gru?neisen 狀態方程的基本參數為:密度ρ0=9.832×102kg/m3,c0= 1.4506×103m/s,s= 0,Γ0= 0,μ= 1×10-3Pa·s.
1.2 射彈的垂直入水模擬及方法驗證
本文采用文獻[6]中超空泡射彈外形開展射彈垂直入水的數值研究,其幾何模型如圖1所示,空化器直徑d=1.42 mm,射彈長度l=157.4 mm,射彈尾端直徑D=13.12 mm。

圖1 射彈幾何模型Fig.1 Geometric model of projectile
基于以上數值求解模型,射彈以970 m/s 垂直入水過程中入水空泡的形態演化如圖2所示。

圖2 射彈垂直入水過程Fig.2 Vertical water-entry process of projectile
可見,經射彈頭部撞水、入水空泡敞開,逐步形成包覆于彈體的入水超空泡,射彈隨即進入水中航行狀態。將CEL 方法獲得的射彈入水后水中航行超空泡形態,與文獻[6]中試驗及Logvinovich 獨立膨脹原理[10]獲得的超空泡形態(泡內壓力取水的飽和蒸汽壓)對比,如圖3~4所示。

圖3 射彈水中航行超空泡形態與試驗、理論模型結果對比Fig.3 Comparison of cavity shapes among computation,experiment and theory

圖4 數值模擬的超空泡輪廓與試驗、理論模型結果對比Fig.4 Comparison of cavity profiles among computation,experiment and theory
可見,沿空泡長度方向,數值模擬與試驗數據、理論計算結果在空泡前段吻合較好:以空化器直徑d為特征尺寸,空泡輪廓在縱向尺度近似L/d=50 的范圍內,CEL 數值模擬、獨立膨脹原理均與試驗結果相接近。空泡長度方向尺度繼續增加,空泡半徑尺寸誤差累積,差異逐漸明顯。以射彈尾端處空泡截面半徑為例,相對于試驗光測數據,CEL數值模擬結果略小,而獨立膨脹原理計算結果略大,相對誤差分別為11.2%、7.34%。
在理想垂直入水狀態下,射彈高速入水載荷形式較為簡單:彈體在觸水瞬間受到軸向入水沖擊載荷作用,而后入水空泡敞開,水的慣性流動形成后受到連續的入水水動力載荷作用,如圖5所示。
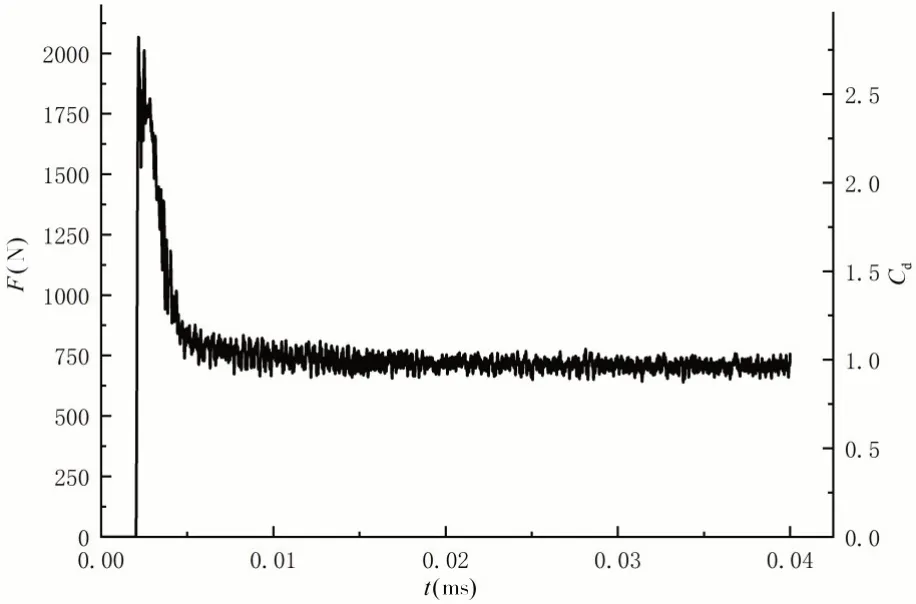
圖5 射彈垂直入水載荷曲線Fig.5 Time history of axial load in the projectile’s vertical water-entry process
由一維彈性碰撞理論,剛性平板沖擊可壓縮水面沖擊壓力的極限值的估算公式為

式中,ρ為水的密度,c為水中聲速,v0為結構入水速度。CEL 數值模擬獲得的入水沖擊載荷峰值Fmax= 2000 N,小于由此極限壓力峰值計算的沖擊載荷(2223 N)是合理的,兩者的相對誤差為10%。
基于細長體理論并考慮水體的可壓縮性,圓盤空化器超空泡航行阻力系數Cd的計算方法[4]為

以射彈頭部半徑為特征尺寸,由以上理論公式計算得到射彈水下超空泡航行的阻力系數Cd=0.89,而CEL數值計算得到的平均阻力系數為0.9715,與理論結果的相對誤差為9.16%。
綜上可見,顯式動力學CEL方法在高速入水空泡界面捕捉、入水載荷計算方面具備一定的求解精度,將其應用于超空泡射彈高速入水的研究是可行的。
2 射彈垂直入水尾拍的數值模擬
作為射彈高速入水典型特征的入水超空泡,同時構成了射彈入水、水中運動的動力學邊界。由于發射初始擾動、射彈空中彈道擾動因素的存在,射彈入水過程中不可避免地會存在一定的攻角、側滑角散布。射彈在擾動運動狀態下,帶攻角、側滑角入水,彈體與入水空泡壁面接觸進而形成了射彈的尾拍(tail-slap)現象。
基于上文數值求解模型,開展射彈在1000 m/s速度、1°攻角(假設其為空中段飛行最大攻角)垂直入水過程的數值模擬,獲得射彈入水的首次尾拍過程如圖6所示。可見,伴隨射彈尾拍,入水空泡表現出顯著的不連續演化特征。

圖6 射彈帶攻角垂直入水過程Fig.6 Water-entry process of projectile with attack angle
射彈在入水的首次尾拍后,彈體反向偏轉,再次觸水、尾拍,進而形成射彈伴隨尾拍的、水下超空泡航行狀態。射彈姿態偏轉及后續的尾拍過程如圖7所示。

圖7 射彈后續的尾拍過程Fig.7 Subsequent tail-slap process of projectile
3 射彈尾拍的載荷及彈道特性
3.1 射彈尾拍的載荷及彈道特性
以上文射彈在1000 m/s速度、1°攻角垂直入水過程為例,其在伴隨尾拍的入水及水下超空泡航行過程中,彈體受到的軸向載荷Fx、側向載荷Fz變化分別如圖8~9所示。

圖8 射彈尾拍引起的軸向載荷變化Fig.8 Change of axial load caused by projectile’s tail-slap
與圖7 相對應,可以看到射彈在完成入水后形成數次尾拍。隨著射彈尾拍觸水,彈體的軸向載荷、側向載荷迅速增加;而后隨著尾拍作用下射彈姿態的恢復,彈體的軸向、側向載荷也隨之下降。射彈單次尾拍的載荷變化歷程表現出顯著的非對稱特征。
在射彈伴隨尾拍的入水、水下航行過程中,彈體姿態偏轉角速度的變化如圖10所示。

圖10 射彈伴隨尾拍航行過程中偏轉角速度變化Fig.10 Change of angular velocity caused by projectile’s tail-slap
可見,射彈尾拍起始、結束時刻均伴隨有射彈角速度曲線斜率的突變,使射彈的角速度變化明顯地分為射彈尾拍作用階段與超空泡完整包覆航行階段。在射彈的尾拍作用階段,彈體的姿態偏轉由尾拍側向載荷主導;在超空泡完整包覆航行階段,攻角航行狀態下作用于射彈頭部的側向載荷分量對其姿態偏轉產生影響;不同的載荷量值決定了不同階段的角速度變化的斜率。射彈的往復尾拍運動使射彈的角速度也呈現往復的、近似周期性的變化特征。
值得注意的是,與圖8、圖9中單次尾拍引起的彈體載荷的非對稱特征相對應,彈體尾拍過程在進入水體與反向偏轉回到空泡中的角加速度是有差別的。在圖10中選取射彈角速度變化的一個周期,以特征點A-G加以表征。其角速度變化過程大致可分為3 個階段:(1)從A-B或D-E,射彈尾段以一定的角速度穿越空泡界面,開始在水中滑行,并在B、E達到最大的滑行浸沒角,此階段角速度逐步減小直至為零;(2)從B-C或E-F,射彈尾段由水中滑行狀態向空泡內側反向偏轉,并在C、F離開空泡壁面,此階段反向偏轉角速度逐步增大,在尾拍結束時刻C、F達到最大;(3)在C-D或F-G,射彈處于超空泡完整包覆航行狀態,可近似認為射彈在空泡內以恒定角速度偏轉。
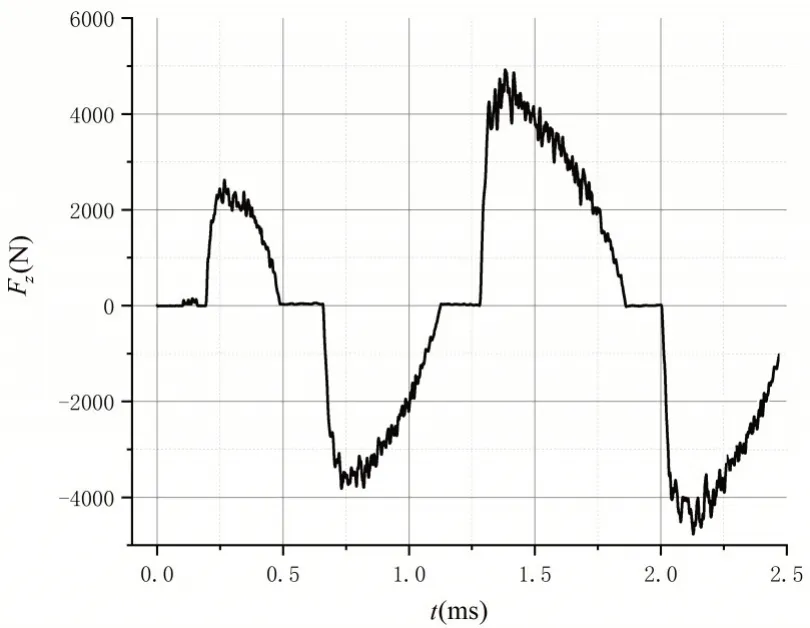
圖9 射彈尾拍引起的側向載荷變化Fig.9 Change of lateral load caused by projectile’s tail-slap
由于角速度的存在,射彈尾拍過程中(A-C或D-F)的有效攻角αeff為



相應地,伴隨射彈帶攻角入水、超空泡狀態下的往復尾拍,射彈的航行攻角α的變化如圖11所示。

圖11 射彈尾拍引起的航行攻角變化Fig.11 Change of attack angle caused by projectile’s tail-slap
3.2 射彈尾拍對水彈道性能的影響
就射彈入水的首次尾拍而言,由于介質突變,射彈在入水尾拍形成的側向水動力載荷,作為初始擾動力,是形成射彈超空泡航行往復尾拍運動的主要原因。初始擾動作用的大小,在射彈入水首次尾拍的空泡演化特征上也有所體現。
以射彈1000 m/s 入水速度下,不同攻角垂直入水過程為例(為使射彈尾拍觸水位置在彈體質心后,本文入水攻角控制在2°以內),數值模擬得到其首次尾拍過程中的彈體姿態偏轉及空泡形態演化,如圖12 所示。可見,射彈的入水攻角越大,入水初始擾動越大,射彈尾拍的作用行程更長,尾拍引起的空泡不連續演化特征也越顯著。

圖12 不同攻角下射彈垂直入水過程對比Fig.12 Comparison of projectile’s water-entry processes at different attack angles
值得注意的是,由于射彈與入水空泡壁面之間存在一定的間隙,本文研究的射彈在以較小攻角、側滑角入水過程中(如圖12(a)射彈以攻角α= 0.5°入水),彈體姿態的微幅偏轉始終在入水空泡形成的空間范圍以內,射彈并未發生尾拍現象。在此入水、水下航行狀態下,射彈通過作用于頭部空化器的側向力恢復彈體姿態偏轉,其航行阻力也與理想的垂直入水狀態相近。
對于射彈在完成入水、進入水下超空泡航行狀態下的尾拍,以射彈入水速度1000 m/s,入水攻角α分別為0.75°、1.25°、1.75°下的垂直入水過程為例,其在伴隨尾拍的入水及水下超空泡航行過程中,軸向載荷Fx、側向載荷Fz變化的對比,分別如圖13~14所示。

圖13 不同攻角下射彈垂直入水軸向載荷變化對比Fig.13 Comparison of axial loads in projectile’s waterentry process at different attack angles

圖14 不同攻角下射彈垂直入水側向載荷變化對比Fig.14 Comparison of lateral loads in projectile’s waterentry process at different attack angles
可見,在射彈入水初期,連續的2次尾拍引起的彈體軸向、側向載荷變化有明顯差別;在射彈第3、4 次尾拍,其水動力載荷的形式、幅值,及尾拍作用時間相接近,表明射彈開始進入穩定的水下超空泡尾拍航行狀態。針對射彈尾拍對其水中彈道性能的影響,本文基于以此階段射彈的尾拍載荷予以研究。
同時,在本文研究的入水攻角2°以內,射彈在不同攻角下,水下穩定尾拍航行過程的水動力載荷的幅值和尾拍作用時間相近。以下取射彈入水速度1000 m/s,入水攻角為1.25°的入水狀態,對其第4次尾拍及空泡完整包覆狀態航行過程中的航行阻力變化取均值,對射彈水下超空泡尾拍航行狀態的彈道性能進行評估,如圖15所示。

圖15 射彈尾拍航行阻力與無尾拍航行阻力對比Fig.15 Comparison of drag forces with and without projectile’s tail-slap
射彈尾拍航行阻力均值以F′表示,不考慮尾拍時射彈的航行阻力以F表示,定義尾拍阻力增加系數k=F′/F=Cd′/Cd。其水下超空泡尾拍航行狀態下k= 1.22,航行阻力增加了近22%。可見,由于尾拍的存在,射彈的航行阻力的增加是十分顯著的。
3.3 射彈水彈道性能的評估
不考慮重力作用,射彈在水下運動可簡化為

對上式積分,并令速度衰減系數b=CdπR2ρ/2m,可以得到

再次積分得到彈體水中運動位移s與時間t的關系:

進而可得到其速度衰減與位移的關系為

將射彈水下超空泡尾拍航行狀態,以考慮尾拍阻力增加系數k的方式向理想的超空泡航行狀態等效,得到射彈在水中超空泡理想航行狀態與尾拍航行狀態下,彈體速度隨射程的衰減,如圖16所示。

圖16 射彈水下超空泡航行速度衰減隨位移的變化Fig.16 Variation of projectile’s velocity attenuation with penetration distance
隨著射彈入水深度的增加和入水速度的衰減,其空泡尺度不斷減小。從射彈的水下毀傷效能角度,要求在其水彈道末段保持一定的航速;而從彈道穩定角度,則要求其保持超空泡水下航行狀態不變,即空泡仍可以將彈體完整包覆。超空泡射彈水下射程的估計,即在這兩方面約束下加以開展。
在彈道穩定性方面,取射彈長度不超過空泡最大直徑位置對應長度作為空泡完整包覆約束,則射彈在空化數σ=0.0065達到此臨界要求,其航行空泡包覆狀態如圖17所示。

圖17 射彈水下航行空泡包覆臨界狀態Fig.17 Critical cavity profile of projectile in underwater motion
在射彈的垂直入水狀態下,考慮水下環境壓力隨射彈入水深度的變化、彈體速度的衰減,將以上射彈的彈道規律轉化為空化數隨射程的變化,如圖18所示。

圖18 射彈垂直入水空化數隨射程的變化Fig.18 Variation of cavitation number with penetration distance in projectile’s vertical waterentry process
結合圖16可以看到,超空泡射彈垂直入水時,隨著入水深度的增加,其有效射程主要受到空泡包覆的完整性和彈道穩定性制約;而在其最大射程內,射彈的末段毀傷速度仍有一定裕量,即超空泡射彈應用于較淺的水深,可將此裕量轉化為更大的射程。
以最大作戰深度20 m 為例,以此最大深度的環境壓力估算,并考慮彈體速度的衰減,可得到空化數隨射程的變化,如圖19 所示。可見,超空泡射彈在1000 m/s 初速下,20 m 作戰深度范圍內,其水下有效射程可達近200 m,射彈尾拍對其射程的影響也非常顯著。而提高射彈的發射初速,還可進一步增加其水下射程。

圖19 射彈20m水深超空泡航行空化數隨射程的變化Fig.19 Variation of cavitation number with penetration distance in projectile’s underwater motion with a depth of 20 m
4 結 語
本文針對射彈高速入水問題,采用顯式動力學CEL 方法開展了射彈入水尾拍的相關數值模擬研究,捕捉到了射彈尾拍伴隨的空泡壁面的不連續演化特征,并對其尾拍水動力載荷、尾拍彈道運動特性進行了研究。
在尾拍對射彈水彈道的影響方面,對射彈單個尾拍周期內航行阻力取均值,通過引入尾拍阻力增加系數的方式,將其尾拍航行狀態向理想的超空泡航行狀態等效,獲得了射彈水下超空泡尾拍航行過程的彈道性能。進一步對射彈水下射程的評估表明,采用超空泡射彈武器進行艦艇的水下近程防御是可行的。
