基于二進小波的人臉特征提取與檢索
2022-08-17 10:07:26阿斯古麗艾合麥提吐爾洪江阿布都克力木趙思溫
電子設計工程 2022年15期
關鍵詞:特征提取
阿斯古麗·艾合麥提,吐爾洪江·阿布都克力木,趙思溫
(1.昌吉學院數學與數據科學學院,新疆昌吉 831100;2.新疆師范大學數學科學學院,新疆 烏魯木齊 830017)
二進小波變換在人臉圖像特征提取尤其是在邊緣檢測方面應用廣泛,基于單個特征的人臉圖像特征提取方法不能夠無缺且足夠地描述圖像的內容信息[1],因此,文中用二進小波變換進行邊緣檢測,提取人臉圖像的相關信息,將顏色、形狀、紋理3 種人臉特征矢量數據進行融合和分析,并作了相關研究。雖然目前部分研究人員已經給出了將顏色、紋理以及形狀特征中的兩個特征融合的圖像特征提取及檢索算法,但是由于提取的單個特征算法的效果不理想[2],因此文中需要對單個特征提取算法進行改進,最終融合多種特征,從而描述圖像的內容信息,以此達到較優的效果。
1 二進小波變換
定義1[3]令函數若存在常數A、B且滿足0 <A≤B<∞,使得:

則稱ψ(t)為二進小波,式(1)叫做二進小波的穩定性條件。當A=B時,稱為最穩定條件。
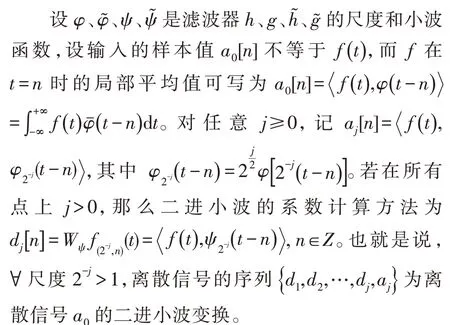
定理1[4](二維àtrous 算法)
需要說明的是,提出的àtrous 算法是在Mallat 創建的算法基礎上修改得到的。其分解公式如下:
2 人臉特征提取方法
2.1 環色直方圖特征提取
假設尺寸為M×N的圖像用I表示,圖像已量化的彩色邊緣用F表示,P=(x,y),(x,y)∈F代表彩色邊緣F內所有像素點的組合。|P|代表邊緣點的集合表示彩色邊緣的中心點,包括計算求出以C點為圓心的最大半徑為將半徑R用正整數n平分,求出每個等分的數值,之后以中心點C為圓心,以(k×R)/n(1≤k≤n)作為半徑,能夠計算出數量為n的圓環邊緣個數,那么由內到外每個環和P的交集把P分成P1,P2,…,Pn。假定Pk代表第k個圓環的邊緣點個數,Hk為根據第k個圓環灰度出現的頻率數值,通過匯總分析繪制一維直方分布圖,計算方法是:分析各圓環Pk的顏色數值是j(j=0,1,…,255) 的像素數量hk,j=sum{P(x,y):P(x,y)=j,?(x,y)∈Pk},進而可以繪制出彩色邊緣環形顏色直方分布圖[5]:

2.2 二進小波變換的邊緣梯度特征提取算法
1)基本原理
如果F圖像具有N×N個像素,那么F=fn,m,n=0,1,2,…,N-1,m=0,1,2,…,N-1 因此首先按照連續圖像提取的方法,利用小波變換對圖像邊緣進行提取。由于在實際的操作中會受到環境和其他因素的影響,所以數字圖像基于二進小波變換的邊緣提取計算方法如下:
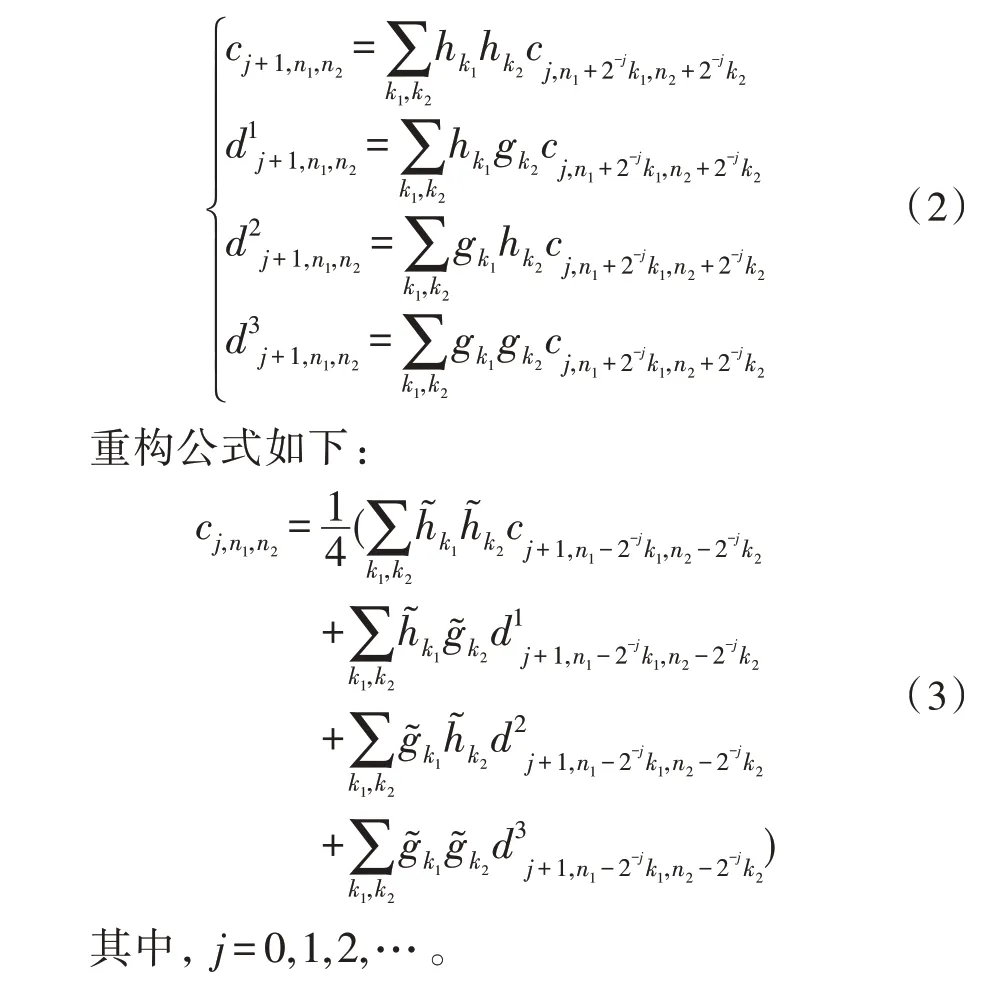
①參數取離散值a=2-j,計算求出F圖像的二維小波變換值W1f(2-j,n,m)、W2f(2-j,n,m),n,m=0,1,2,…,N-1,其中既可以按照傳統的三層分解,也可以根據用戶的選擇分解層數。通過如下兩種方法得到二維小波變換:一是連續小波變換,即將計算出的離散數值在圖像中表現出來,變成連續信號,再求出連續小波變換在不同尺度下的小波系數;二是二進小波變換,即使用合適的小波和濾波器組,然后對數字圖像信號與濾波器通過卷積可求出二進小波變換,計算出不同尺度下的小波系數。
②對所有像素(n,m)求出梯度值以及它們之間夾角Af(2-j,n,m)的正切函數值[6]。
③求邊界點:確認閾值T>0,因此n,m=0,1,…,N-1。如果W2f(2-j,n,m)≥T,那么由W2f(2-j,n,m)計算出局部模極大數值,則(n,m)是模極大點,同時也成為了一個邊界點。但是判斷離散圖像中一個像素點(n,m)是不是模極大數值點和連續圖像對比不會有差異,根據圖像的構成可以看出,在單個像素點取相鄰點時可以選擇不同的個數,如4、8、16 等,可以根據實際需求選擇。文中按照8 個鄰接點的方法,將平面分成8 個不同的區域。這8 個分區依次由22.5°、67.5°、112.5°、157.5°、-157.5°、-112.5°、-67.5°、-22.5°組成。受到梯度方向對稱性的影響,使用4 個扇區1、2、3、4 中的梯度方向,各自的像素點(n,m) 及tanAf(2-j,n,m) 需 在4 個區域之中。可以用CodeAf(2-j,n,m) 標 記tanAf(2-j,n,m)所進入區間的編號,將Mf(2-j,n,m)和分區CodeAf(2-j,n,m)在各自梯度方向鄰近像素的模值進行對比[7]。
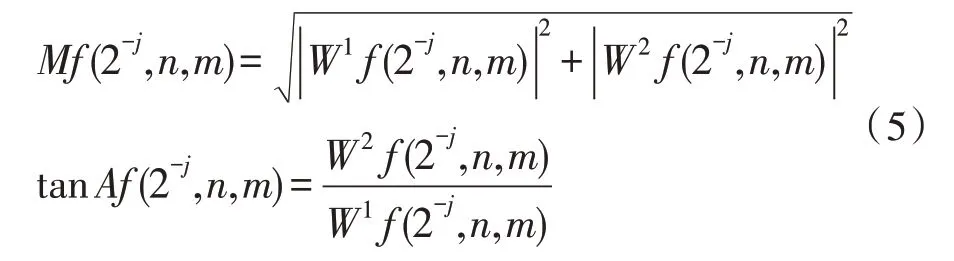
④連接各尺度上的邊緣點,構成各自邊緣的極大曲線圖。在離散條件下,極大曲線是根據圖像離散采樣各鄰近的邊緣點(n,m) 和(n,m)+γ(n,m) 相連生成的曲線,包括γ(n,m)正交于CodeAf(2-j,n,m)的梯度角度[8]。根據原始圖像和二值邊緣的互相影響,計算求出原始圖像的彩色邊緣數據。所以必須選用性能優良、符合實際的小波函數和濾波器,以便更好地進行邊緣檢測。第一種和第二種二進制小濾波器系數分別如表1 和表2 所示。用兩種二進制小濾波器系數的邊緣檢測,結果圖如圖1-2 所示。
表1 第一種二進小波濾波器系數
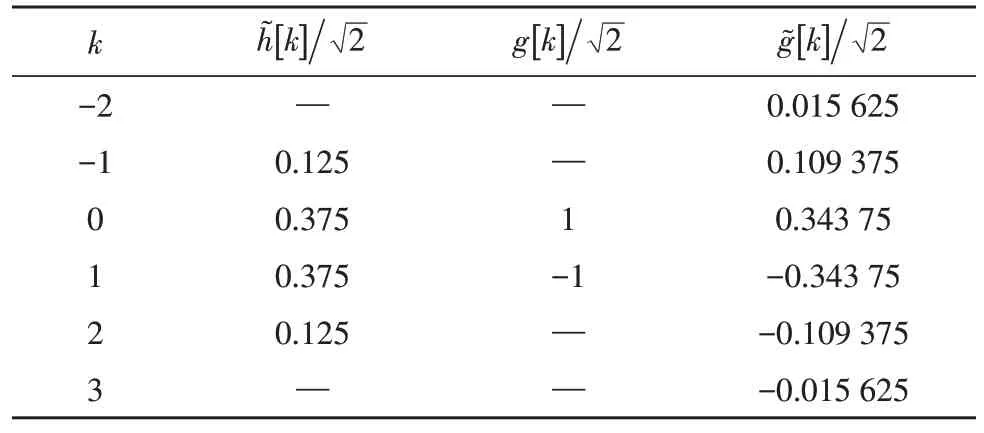
表2 第二種二進小波濾波器系數
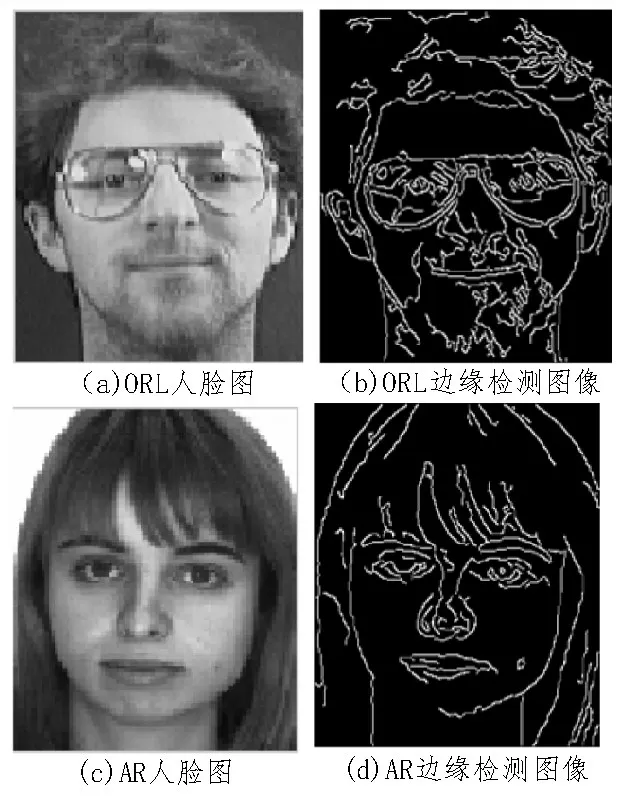
圖1 用第一種二進小波濾波器系數的邊緣檢測結果圖
從圖1 和圖2 可以看出,圖2 的邊緣細節比圖1的多,邊緣細節越多,對后面的實驗越有利。

圖2 用第二種二進小波濾波器系數的邊緣檢測結果圖
2)算法步驟
計算小波模極大數值環形直方圖結構數值的方法如下:將徑向尺寸R平均分成m等份,然后以(k×R)/m(1 ≤k≤m)為半徑繪制圓環,由此得到數量為m的多個同心圓環,在每個圓環和P的交叉處可以求出邊緣圖像點的數值根據第m個圓環內的所有邊緣點,求出在邊緣線上的點的小波模極大數值累計結果,根據結果繪制小波模極大值環形直方分布圖[9]。
文中繪制邊緣梯度直方分布圖的主要步驟如下:①根據二進小波模極大值計算出邊緣點的數值。②求出邊緣圖像的梯度角度Aa f(x,y),并將弧度轉換為度。③依據邊緣像素點的梯度數值繪制邊緣梯度方向直方分布圖H(i)。具體實現的過程為:將梯度角度Aa f(x,y)∈[0°~360°]平均分成L個區域,匯總區間內包含的邊緣個數,那么n(i)的區間數值是:

為了使邊緣梯度方向直方圖對圖像光照變化、平移變化、尺度變化具有不變性,根據邊緣像素計算結果,繪制出邊緣梯度方向的直方分布圖H(i)[10]。在直方分布圖H(i)中,L的數值影響和角度量化之間成正比,L的數值越大,角度量化的變化越多。根據以上計算結果,在直方分布圖H(i)中,橫坐標中每一個角度單位量化數值為8,角度是45°,縱坐標表示的是角度單位的像素占所有邊緣像素的比值,得到的一維邊緣梯度方向直方圖函數如下:

式中,ni代表邊緣處的梯度方向角在i×45°~(i+1) ×45°范圍內的像素數量,N代表邊緣像素點的總數值[11]。
2.3 LBP特征提取
根據圖像的尺寸M×N調整圖像的比例,在圖像左上角設置滑動區域,然后按照一定規律來移動鄰域,并對鄰域內的圖像塊進行預先設置的運算[12]。待該鄰域運算結束后,便將領域向右或向下移動一步,再作相同處理,直至覆蓋圖像中所有的像素點。特征提取之前,需要設定領域尺寸以及移動步長(文中設定兩個像素點之間的距離為一個步長)。一般按照從上到下、從左到右的順序,從圖像的左上角入手,參照一定的比例尺寸開始移動,根據獲得的圖像像素進行卷積計算,通過計算結果可看出圖像的紋理特性。
3 三個特征融合的原理和實驗結果分析
利用之前所描述的3 種方法,即環形顏色直方圖、二進小波邊緣梯度特征的直方圖以及LBP 算子對圖像的實際內容進行表達,完成了以3 種特征結合為基礎的圖像特征提取與檢索。若將Q看作待特征檢索的圖片,把I看作圖像庫的圖片,那么這兩個圖片的彩色邊緣環形顏色直方分布圖類似程度則可以表示為其中分別可看作I、Q第k個圓環的顏色直方分布圖序列;可看作是需要檢索的圖片于第k個圓環的彩色邊緣個數[13]。可以把 |P|看作需要檢索圖片所有邊緣的數量,把ωk看作權值,該數值考慮到了各個點在所有圓環里分布的情況,其目標為增加關鍵區域類似對總體相似程度的干擾。
可把S=[S1,S2,…,SM]看作是已經歸一化處理的小波模極大數值環形直方分布圖,那么已經歸一化的邊緣梯度直方圖可寫作那么D2=D(SQ,SI),D3=D()則表示彩色邊緣環形顏色直方分布圖和已經歸一化處理的小波模極大數值環形直方分布圖的相似程度[14]。因此,隨機兩張圖片的相似程度可表示為D(I,Q)=w1D1+w2D2+w3D3,其中,w1、w2、w3代表3 類特征相似性程度所設置的權值,且符合w1+w2+w3=1[15],三類權值可選擇為w1=0.3、w2=0.4、w3=0.3。
4 結論
利用3 種方法,即環形顏色直方圖、二進小波邊緣梯度方向直方圖以及LBP 算子來描述人臉圖片信息,在兩種不同的人臉數據庫里通過軟件Matlab 進行模擬分析;同時,對照了兩種不同的二進小波濾波器的邊緣檢測結果圖。為了更深入地檢驗提出方法的有效性,將其與現階段的相同種類方法進行了比較。文中所使用的3 種方法蘊含了圖像多層人臉圖像內容,互相補充地描述了圖片重要信息,還確保了其旋轉不變性、平移不變性以及尺度不變性,且抗干擾能力較好[16]。
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年7期)2017-04-18 13:41:09
自動化學報(2017年11期)2017-04-04 02:52:58
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:38
計算機工程(2015年4期)2015-07-05 08:28:02
機電信息(2015年3期)2015-02-27 15:54:46
機械工程師(2015年10期)2015-02-02 01:13:49
