融合大高差序列影像的單體異形建筑免像控建模方法
2022-08-18 08:53:10孫保燕周鑫覃禹程張小可黃邦偉
遙感信息 2022年2期
孫保燕,周鑫,覃禹程,張小可,黃邦偉
(桂林電子科技大學(xué) 建筑與交通工程學(xué)院,廣西 桂林 541004)
0 引言
數(shù)字多維城市的發(fā)展為推進(jìn)城市信息模型(city information modeling,CIM)基礎(chǔ)平臺(tái)建設(shè)奠定了基礎(chǔ),2020年9月印發(fā)了第一本城市信息模型標(biāo)準(zhǔn)——《城市信息模型(CIM)基礎(chǔ)平臺(tái)技術(shù)導(dǎo)則》。隨著城市化速度加快,外形不規(guī)則、流線多向、立面復(fù)雜多樣的異形建筑數(shù)量也越來越多。為順應(yīng)城市信息模型基礎(chǔ)平臺(tái)建設(shè)發(fā)展,以及建立城市實(shí)景三維模型和異形建筑的精細(xì)化實(shí)景三維模型需求日益顯著,一個(gè)大高差環(huán)境下的高效率重建精細(xì)實(shí)景模型具有較高的前景和經(jīng)濟(jì)價(jià)值[1]。
目前免除地面像控點(diǎn)的無人機(jī)實(shí)景三維模型建模研究在國內(nèi)有一定的進(jìn)展,相比測繪地面像控點(diǎn)而言,減少甚至免除像控點(diǎn)的研究對(duì)無人機(jī)航測工作具有較大價(jià)值[2]。采用消費(fèi)級(jí)無人機(jī)免除像控點(diǎn)的航測,能夠有效地實(shí)現(xiàn)便捷測圖工作[3],且能夠完成很多不同類型的航測方案,為高效測圖工作提供了很多便捷的途徑[4]。
國內(nèi)外諸多學(xué)者從無人機(jī)傾斜攝影測量技術(shù)關(guān)鍵技術(shù)的發(fā)展、像控點(diǎn)布設(shè)、航線規(guī)劃、特殊場地模型創(chuàng)建等多方面展開了研究[5-6]。針對(duì)飛行高度、航攝傾角、航線方案等諸多問題,多數(shù)研究者采用多數(shù)據(jù)融合方式完成了單體建筑的精細(xì)化建模[7-8]。在大高差環(huán)境下,區(qū)域異形建筑精細(xì)化三維模型重建鮮有相關(guān)針對(duì)性研究。本文以校區(qū)大學(xué)生活動(dòng)中心異形建筑為研究對(duì)象,提出一種基于消費(fèi)級(jí)無人機(jī)融合大高差影像序列的單體異形建筑免像控建模方法。研究中涉及多環(huán)交叉環(huán)拍方案與五架次拍攝方案進(jìn)行效率和精度對(duì)比,驗(yàn)證了多環(huán)交叉環(huán)拍方案的高效性、有效性,并采用“高空多環(huán)交叉環(huán)拍、弓形貼面環(huán)拍為主,航攝分區(qū)公共接邊過渡影像為輔”的航攝影像采集方式,借助航攝分區(qū)公共接邊過渡影像拼接大高差的不同航攝序列影像,完成區(qū)域單體異形建筑的實(shí)景三維模型重構(gòu)。該方法重建的異形建筑三維模型紋理清晰,精度高,為大高差環(huán)境的城市建筑精細(xì)化三維建模提供了有效方案,可順應(yīng)城市信息模型基礎(chǔ)平臺(tái)的建設(shè)。
1 大高差影像三維重建技術(shù)
1.1 大高差影像介紹
在《工程攝影測量規(guī)范》(GB 50167—2014)4.1.12航高保持規(guī)定指出:同一航線上相鄰的航攝圖像的航高差不應(yīng)大于30 m,最大航高與最小航高之差不應(yīng)大于50 m,實(shí)際航高與設(shè)計(jì)航高之差不應(yīng)大于50 m[9]。
1.2 飛行高度對(duì)影像質(zhì)量的影響
如式(1)所示,在保證無人機(jī)的鏡頭焦距和感光元件(complementary metal oxide semiconductor,CMOS)的尺寸不變情況下,航攝高度與地面分辨率成正比關(guān)系。高空航攝條件下,地面分辨率數(shù)值越大,圖像質(zhì)量越差,重建的模型精度越差。為重建良好的高精度模型,需進(jìn)行低空航攝,采集效果良好的圖像分辨率圖像。
(1)
式中:H為攝影航高,單位為m;f為鏡頭焦距,單位為mm;a為像元尺寸,單位為mm;GSD為地面分辨率,單位為m。
1.3 大高差影像融合關(guān)鍵技術(shù)
大高差實(shí)景建模技術(shù)的關(guān)鍵點(diǎn)為兩組大高差序列像片可正常融合。重建影像間的幾何關(guān)系,首先要保證影像有足夠的重疊度[10]。研究中多環(huán)交叉航攝像片與立面弓形貼面航攝像片在垂直高度上遠(yuǎn)遠(yuǎn)高于50 m,屬于大高差影像。由于像片距離和傾角差異過大的影響,兩組像片間的重疊度極低,無法正常通過自動(dòng)搜尋同名點(diǎn)的方式進(jìn)行匹配,模型重建后易出現(xiàn)大面積分層、錯(cuò)層問題[11]。針對(duì)上述問題,本文提出一種大高差航攝分區(qū)公共接邊過渡影像作為大高差像片融合的輔助匹配“橋梁”(圖1)。
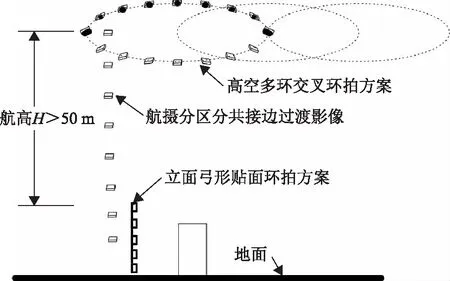
圖1 航攝分區(qū)公共接邊過渡影像示意圖
過渡影像本質(zhì)上屬于攝影分區(qū)中的公共接邊問題,在公共航攝區(qū)域設(shè)置上至下傾角為90°的過渡影像,保證圖像識(shí)別與匹配有足夠多的同名點(diǎn)。過渡影像的重疊度可為相似三角形的性質(zhì)劃分,需依據(jù)過渡影像相鄰的上下像片重疊度和無人機(jī)相機(jī)尺寸大小確定影像的豎直距離差,即可確定過渡像片數(shù)量。依據(jù)相似三角形原理可得式(2)。
(2)
式中:i為過渡影像序列數(shù)量;f為無人機(jī)鏡頭固定焦距;m和n分別為感光元件長和寬;Hi為第i個(gè)過渡影像的航高;Mi和Ni為第i個(gè)過渡影像的取景范圍的長和寬;Si為第i張過渡影像的取景面積。
依據(jù)式(2)已求出第i張過渡影像的取景面積Si,接著還需求出第i張過渡影像的航高Hi(式(3))。
(3)
式中:S2與S1為第二張與第一張過渡影像的面積;k為相鄰過渡影像間的重疊度系數(shù)。假定已知相鄰像片間的重疊度和初始過渡影像H1,即可求得第2張過渡影像的航高H2,同理可求得第i張過渡影像的航高Hi(式(4))。
(4)
以此類推,通過式(4)可得,已知第1張像片與第i像片的間距ΔHi,即可獲得所需的過渡影像數(shù)量(需向上取整)。
1.4 GPS輔助光束法區(qū)域網(wǎng)平差
為實(shí)現(xiàn)免像控建模,應(yīng)考慮偏移、漂移、曝光延遲等因素的影響,因此,需建立曝光延遲的區(qū)域網(wǎng)平差模型(圖2)。傳統(tǒng)的光束法區(qū)域網(wǎng)平差具有一定局限性,過度依賴控制點(diǎn)的選取和高端的無人機(jī)。曝光延遲可更方便地使用消費(fèi)型無人機(jī)。GPS輔助光束法區(qū)域網(wǎng)平差公式如式(5)所示,根據(jù)式(5)求出相機(jī)坐標(biāo)中的像點(diǎn)在像直角空間坐標(biāo)系下的坐標(biāo),實(shí)現(xiàn)免相控建模。
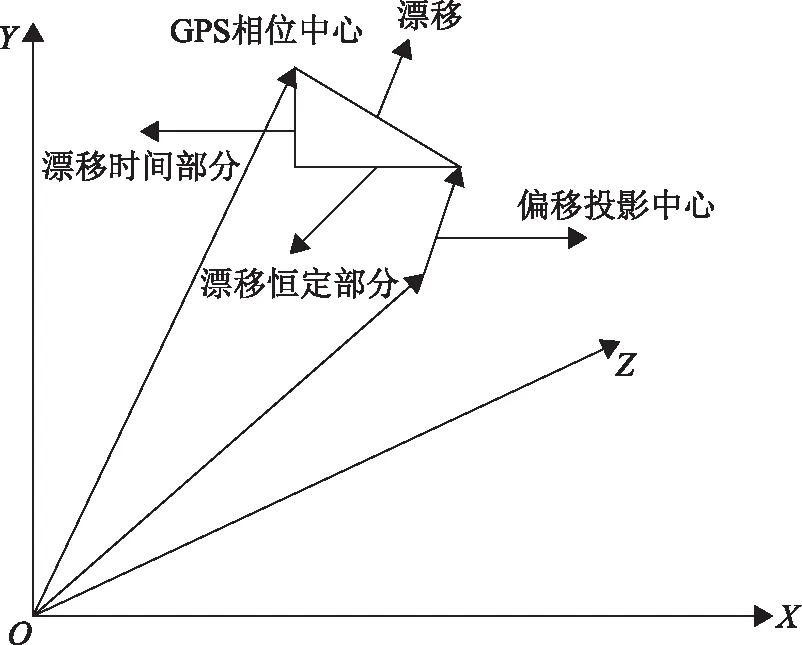
圖2 曝光延遲的區(qū)域網(wǎng)平差模型
(5)
1.5 平面多環(huán)交叉環(huán)拍技術(shù)
平面多環(huán)交叉航攝方案是一種區(qū)域選取拍攝,采用任意多邊形擬圓航攝的方式取代常規(guī)弓形或者井字形航帶網(wǎng)式航線航攝方式(圖3)。在指定區(qū)域以及航攝高度,可設(shè)置不同航飛半徑、航飛間距以及環(huán)繞方向數(shù)等參數(shù)。平面多環(huán)交叉環(huán)拍方案可代替常規(guī)五架次航攝方式,以少數(shù)像片從多視角方向獲取地物豐富數(shù)據(jù)。
圖3 平面多環(huán)交叉航攝示意圖
1.6 立面弓形貼面環(huán)拍技術(shù)
立面弓形貼面環(huán)拍方案是一種針對(duì)異形單體建筑物測量的高效航攝方式,是水平五架次弓形航攝方式的空間轉(zhuǎn)換(圖4)。根據(jù)單體異形建筑區(qū)域范圍、建筑形狀、建筑周圍環(huán)境,個(gè)性化規(guī)劃航攝方案,實(shí)現(xiàn)多空間貼面環(huán)繞航攝,異形建筑立面像片的分辨率更均勻,彌補(bǔ)大高差序列影像的建筑立面分辨率較差難題。
圖4 立面弓形貼面環(huán)拍示意圖
2 數(shù)據(jù)采集方案
2.1 實(shí)驗(yàn)區(qū)域及實(shí)驗(yàn)設(shè)備介紹
航攝實(shí)驗(yàn)區(qū)域?yàn)榇髮W(xué)生活動(dòng)中心和花江慧谷四創(chuàng)中心組成的300 m×300 m的正方形區(qū)域(圖5),大學(xué)生活動(dòng)中心呈現(xiàn)為非規(guī)整L形建筑(圖6),一側(cè)設(shè)計(jì)了半徑為10 m的圓形演藝廳,與建筑主體具有明顯的樓層高差,另一側(cè)設(shè)計(jì)了不超10°的偏主體五層建筑工作區(qū)。建筑設(shè)計(jì)了邊緣凸出安全樓梯通道,屋頂設(shè)計(jì)為復(fù)雜羽翼展翅形,建筑貼地部分設(shè)有反光玻璃背景連廊,為典型的異形建筑研究對(duì)象,其長為105 m,寬為60 m,高為35 m。

圖5 實(shí)驗(yàn)區(qū)域

圖6 大學(xué)生活動(dòng)中心建筑
航攝實(shí)驗(yàn)采用消費(fèi)級(jí)精靈Phantom 4 RTK無人機(jī),其相機(jī)搭載了2 000萬像素的1英寸大底索尼Exmor R CMOS傳感器,采用了FOV84°、8.8 mm/24 mm(35 mm格式等效)、光圈f/2.8~f/11的廣角自動(dòng)對(duì)焦鏡頭。
2.2 航攝流程方案
實(shí)驗(yàn)過程中需避免陰天低光環(huán)境和大晴天高光環(huán)境,整個(gè)實(shí)驗(yàn)包括:實(shí)驗(yàn)設(shè)計(jì)、數(shù)據(jù)采集、曝光補(bǔ)償、剔除過短基線航片、空三測量、模型重建、數(shù)據(jù)分析,流程如圖7所示。
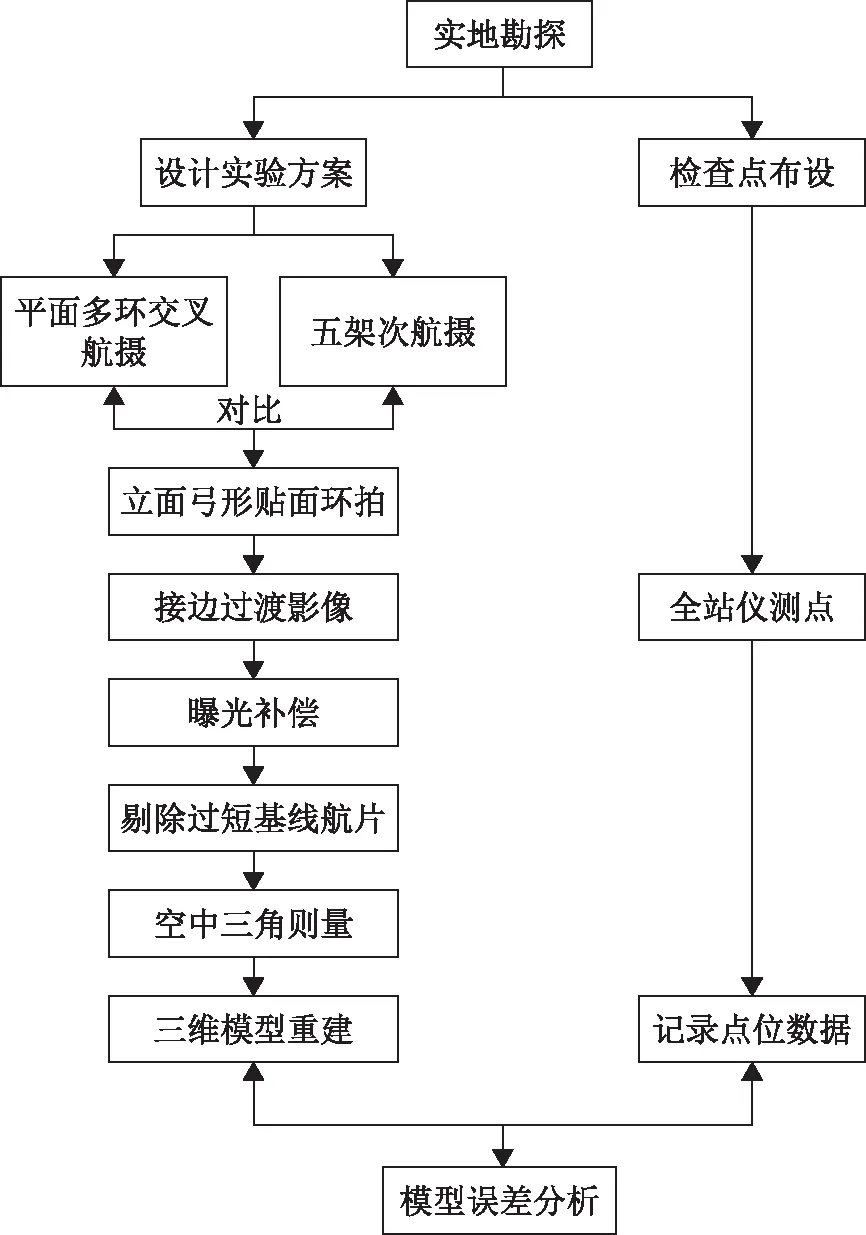
圖7 實(shí)驗(yàn)流程
多環(huán)交叉環(huán)拍攝影會(huì)出現(xiàn)相鄰攝站基線過短的情況,一起空三計(jì)算容易造成高程失鎖錯(cuò)誤,需要在計(jì)算之前事先消除曝光點(diǎn)接近的基線過短的航片,再聯(lián)合進(jìn)行空三測量,避免相鄰攝站基線過短導(dǎo)致空三計(jì)算出現(xiàn)高程失鎖錯(cuò)誤。
2.3 兩種高空航攝方案
根據(jù)測區(qū)建筑環(huán)境,設(shè)計(jì)多環(huán)交叉環(huán)拍航攝和五架次弓形交叉航攝,高度為120 m,擬圓飛行半徑為120 m,間距為37%,無人機(jī)相機(jī)傾角為45°,單圓方向數(shù)為16,飛行速度為15 m/s。五架次航攝航向重疊度為75%,旁向重疊度為70%,無人機(jī)相機(jī)傾角為45°,飛行速度為15 m/s。
2.4 建筑立面弓形貼面環(huán)拍航攝
依據(jù)大學(xué)生活動(dòng)單體異形建筑外形(圖8),設(shè)置了擬建筑立面走勢的弓形貼面環(huán)拍航攝方案,拍攝距離為10 m,航向重疊度80%,旁向重疊度為70%,最大高度40 m,最小高度為3 m,無人機(jī)相機(jī)傾角為0°,飛行速度為10 m/s,航攝耗時(shí)1 239 s。
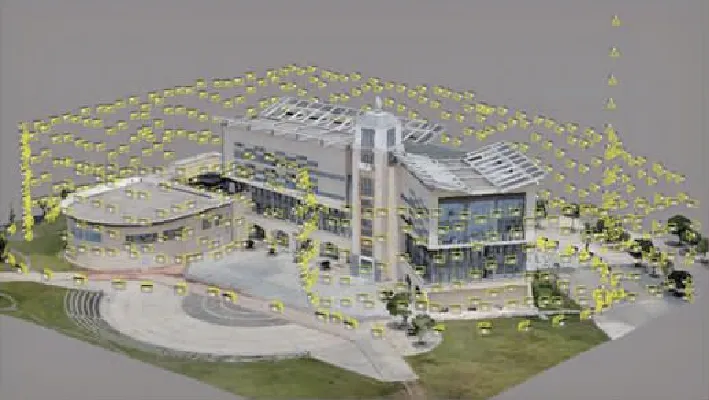
圖8 建筑立面弓形貼面環(huán)拍航攝
2.5 大高差航攝分區(qū)公共接邊過渡影像
高空航攝高度設(shè)定為120 m,單體異形建筑最高位像片高度為38 m,根據(jù)規(guī)范對(duì)高差的定義,本研究所涉及航空影像包含有高空水平航攝圖像和低空貼面航攝圖像,豎向高差已超過50 m,屬于大高差影像。保證兩組像片能夠正常空中三角測量,航攝分區(qū)公共接邊過渡影像間的重疊度系數(shù)設(shè)置為0.9,根據(jù)式(2)與式(3),在大高差航攝分區(qū)設(shè)置單列公共接邊過渡影像,過渡區(qū)域共拍攝了20張傾角90°過渡影像。為增加傾角90°過渡影像與傾角0°貼面環(huán)拍的影像間的同名點(diǎn),在最后一張過渡影像的高度位置拍攝定點(diǎn)交向影像,即從90°至0°之間每隔10°拍攝一張影像,共計(jì)8張影像。
3 實(shí)驗(yàn)結(jié)果
對(duì)多環(huán)交叉環(huán)拍航攝與五架次弓形交叉航攝的實(shí)驗(yàn)結(jié)果進(jìn)行預(yù)對(duì)比,根據(jù)對(duì)比結(jié)果再實(shí)現(xiàn)高空多環(huán)交叉環(huán)拍、弓形貼面環(huán)拍以及航攝分區(qū)公共接邊過渡影像三組像片融合,完成大學(xué)生活動(dòng)中心單體異形建筑的三角網(wǎng)格、DSM白膜和三維實(shí)景模型重建(圖9)。
3.1 航攝效率與重建模型細(xì)節(jié)分析
外業(yè)數(shù)據(jù)采集工作效率注重?zé)o人機(jī)航攝耗時(shí),內(nèi)業(yè)工作效率則注重三維模型重建耗時(shí)[14]。如表1所示,分別統(tǒng)計(jì)了高空兩種航攝的耗時(shí)。
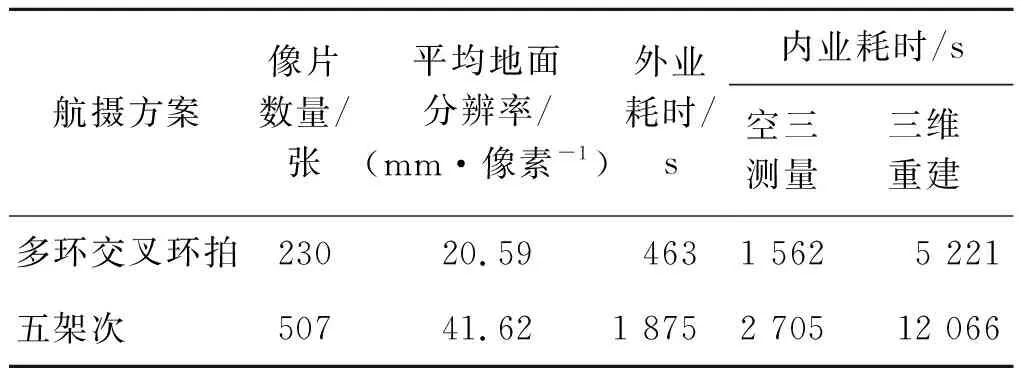
表1 航攝建模效率對(duì)比
根據(jù)數(shù)據(jù)分析,多環(huán)交叉環(huán)拍航攝方案像片數(shù)量明顯少于五架次航攝方案;前者平均地面分辨率優(yōu)于后者;前者外業(yè)耗時(shí)亦遠(yuǎn)遠(yuǎn)少于后者外業(yè)耗時(shí),多環(huán)交叉環(huán)拍航攝方案外業(yè)效率可觀;內(nèi)業(yè)耗時(shí)方面,前者三維重建所需時(shí)間遠(yuǎn)少于后者三維重建時(shí)間,內(nèi)業(yè)重建效率有明顯的差異。
針對(duì)兩種方案的結(jié)果進(jìn)行分析(圖10),對(duì)比建筑立面與地面植物較近區(qū)域建模效果,前者方案建筑立面與地面植物沒有出現(xiàn)重合,三維模型孤立,效果良好,后者建筑立面和地面植物已經(jīng)貼合,建模效果差;異形建筑遮擋面建模效果對(duì)比方面,后者航攝方案下出現(xiàn)了大面積扭曲、立面線條模糊,相比之下,前者航攝方案下,立面層次分明。由此,多環(huán)交叉環(huán)拍航攝方案優(yōu)勢更高,在大面積城市航攝工作中采用多環(huán)交叉環(huán)拍航攝方案更能滿足航測采集工作的需求。
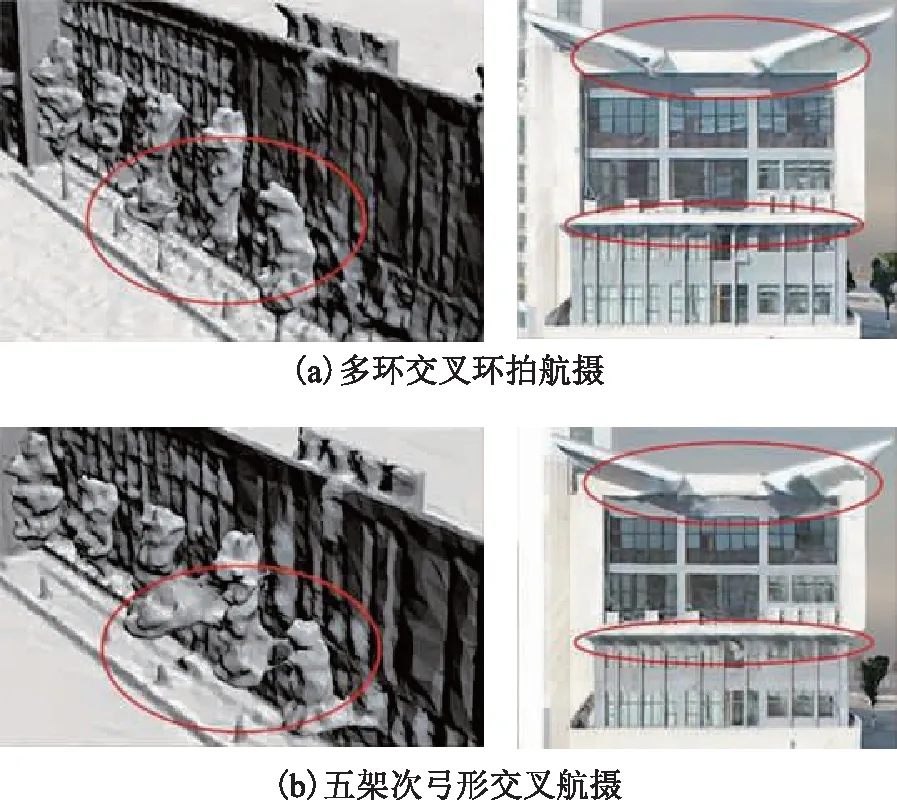
圖10 兩種方案模型對(duì)比
3.2 單體異形建筑模型細(xì)節(jié)對(duì)比分析
融合弓形貼面環(huán)拍以及航攝分區(qū)公共接邊過渡影像三組像片后效果如圖11所示。融合后單體建筑立面的細(xì)節(jié)精度與紋理質(zhì)量都有很大提升,且融合后建筑紋理色彩相對(duì)均勻,異形建筑連廊通透性好,未出現(xiàn)模型扭曲阻塞,建筑異形屋檐模型條理清晰,建筑高反光幕墻立面建模效果較好,異形建筑整體模型精度有所提高。
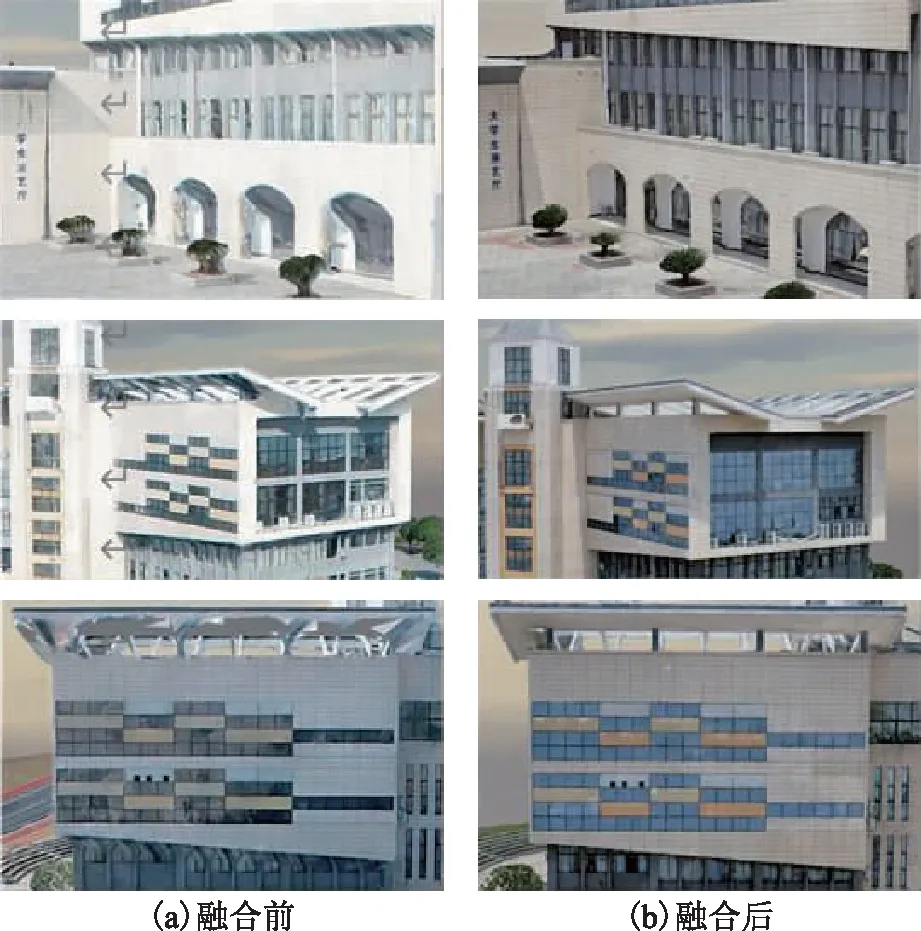
圖11 融合前后模型對(duì)比
3.3 建筑模型免像控精度分析
數(shù)據(jù)精度分析是評(píng)價(jià)一個(gè)建筑質(zhì)量的重要指標(biāo)[15],單體異形建筑精度分析需設(shè)計(jì)平面精度分析以及高程精度分析、對(duì)單體異形建筑立面設(shè)立的檢查點(diǎn)進(jìn)行計(jì)算統(tǒng)計(jì)。平面及高程精度計(jì)算參見文獻(xiàn)[16]。
根據(jù)選取10個(gè)檢查點(diǎn)的實(shí)測值與模型上量取的坐標(biāo)值計(jì)算獲取融合前(表2)與融合后(表3)的精度統(tǒng)計(jì)數(shù)據(jù)。
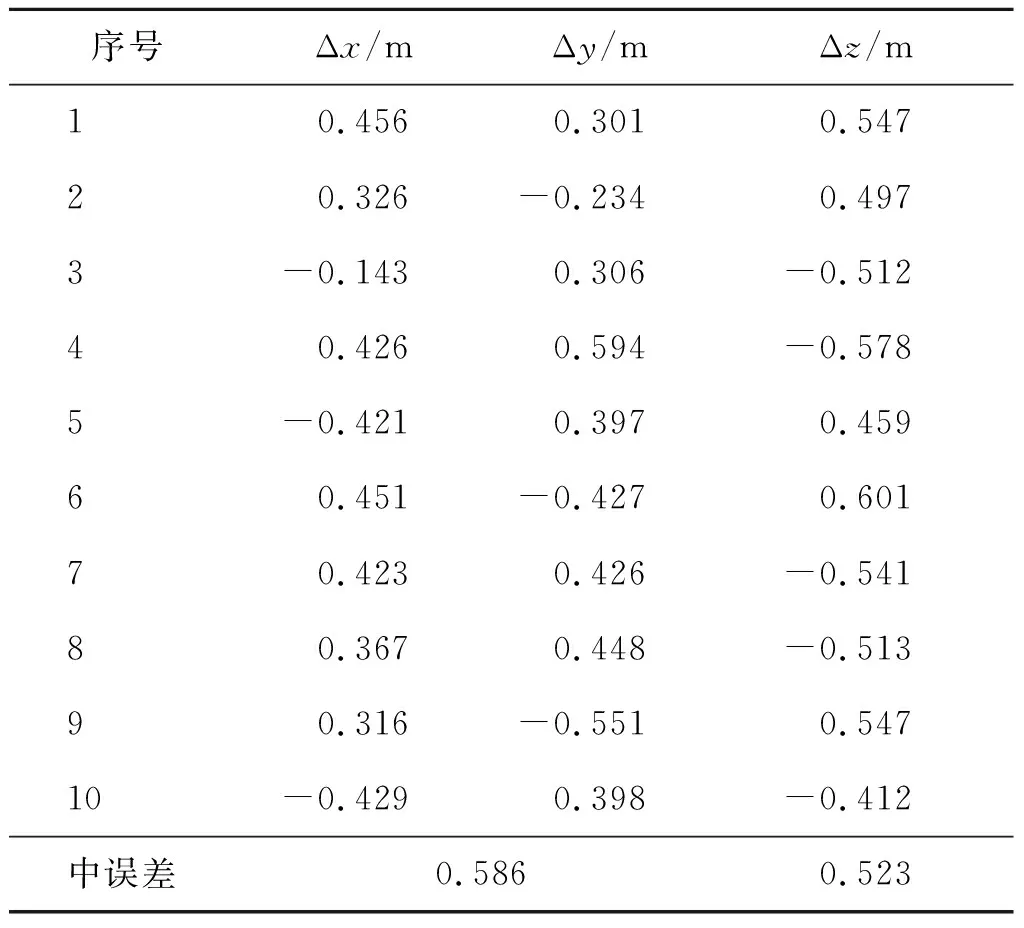
表2 融合前模型三維精度統(tǒng)計(jì)
從表3可知,融合高空多環(huán)交叉環(huán)拍、弓形貼面環(huán)拍以及航攝分區(qū)公共接邊過渡影像三組像片后重建的單體異形建筑整體模型精度較高,融合后的精度較高于精細(xì)化建筑模型精度要求。上述精度數(shù)據(jù)分析表明,采用該融合式航攝方案可以獲取高精度單體異形建筑精細(xì)化三維模型,滿足城市三維模型建模精度需求。
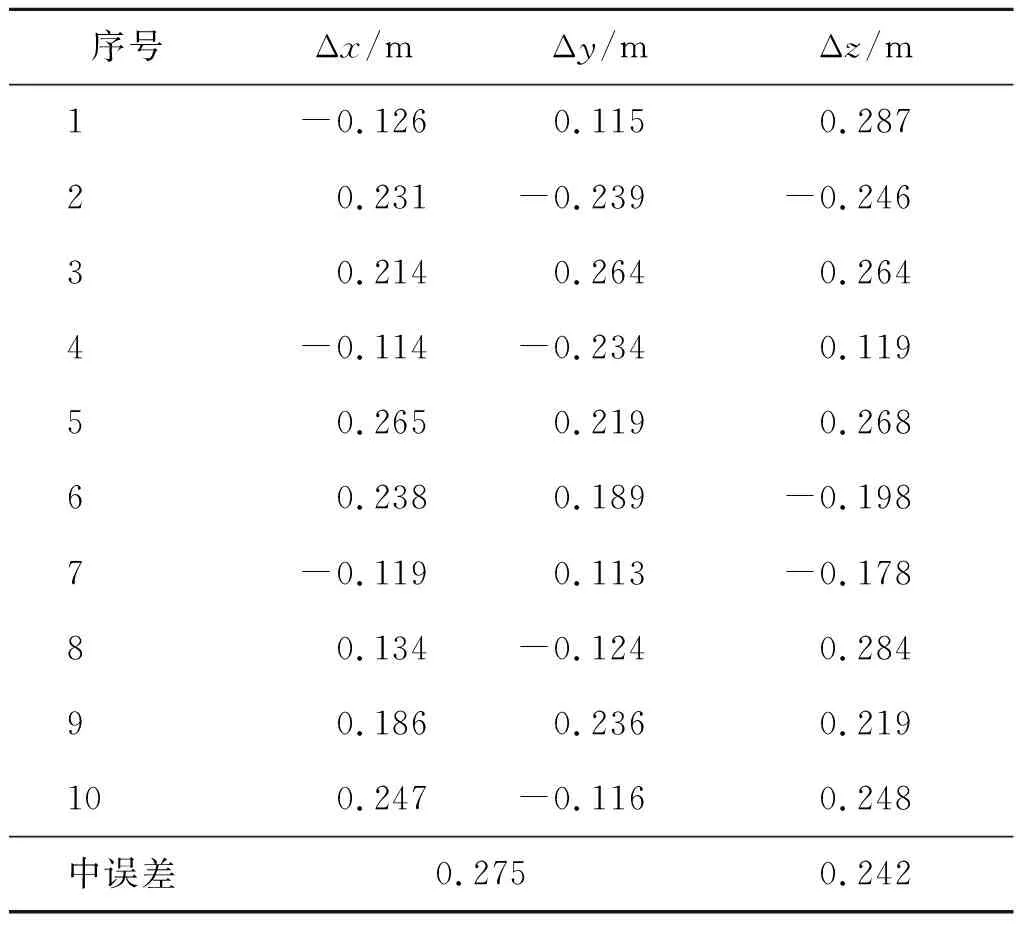
表3 融合后模型三維精度統(tǒng)計(jì)
4 結(jié)束語
本研究從工作效率和模型細(xì)節(jié)完整度方面分析了多環(huán)交叉環(huán)拍航攝和五架次弓形交叉航攝兩種航飛方案,并提出一種基于消費(fèi)級(jí)無人機(jī)大高差影像序列融合的單體異形建筑免像控建模方法,設(shè)計(jì)了航攝分區(qū)公共接邊過渡影像搭橋融合大高差的高空多環(huán)交叉環(huán)拍像片與弓形貼面環(huán)拍航攝像片,完成區(qū)域大高差序列影像實(shí)景建模和單體異形建筑精細(xì)化模型重建工作,得出以下結(jié)論。
1)針對(duì)工作效率而言,在免像控基礎(chǔ)下,同比常規(guī)的五架次航攝方案,多環(huán)交叉環(huán)拍航攝方案不僅重建模型質(zhì)量較高,而且外業(yè)和內(nèi)業(yè)工作效率明顯高于五架次航攝。
2)在大高差環(huán)境下,可融合較少的航攝分區(qū)公共接邊過渡影像,避免大高差影像無法匹配問題,并且融合后模型建模效果良好。
3)采用高空多環(huán)交叉環(huán)拍方式融合弓形貼面環(huán)拍航攝以及航攝分區(qū)公共接邊過渡影像,可在大高差環(huán)境下高效完成單體異形建筑的精細(xì)化模型。
本文方法研究表明,所提出的大高差環(huán)境下的免像控的單體異形建筑建模方法,可根據(jù)實(shí)地航測區(qū)域環(huán)境制定高效的航測采集方案,使用較少的航攝像片完成精度較高的城市實(shí)景三維模型重建工作,能有效面對(duì)當(dāng)代大城市環(huán)境下發(fā)展快、異形建筑多的趨勢,順應(yīng)城市信息模型基礎(chǔ)平臺(tái)建設(shè)發(fā)展。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北方建筑(2021年6期)2021-12-31 03:03:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
文苑(2020年10期)2020-11-07 03:15:36
現(xiàn)代裝飾(2020年6期)2020-06-22 08:43:12
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
現(xiàn)代裝飾(2020年4期)2020-05-20 08:55:08
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
福建農(nóng)業(yè)科技(2016年10期)2016-03-07 09:46:49
少兒科學(xué)周刊·兒童版(2015年6期)2015-11-24 03:49:38