袋裝水泥無人化智能機器人發運系統介紹
2022-08-22 03:06:30易建偉陶德俊單體飛彭軍飛安徽海螺中南智能機器人有限公司安徽蕪湖241213
水泥工程 2022年2期
關鍵詞:系統
易建偉,陶德俊,單體飛,彭軍飛(安徽海螺中南智能機器人有限公司,安徽 蕪湖 241213)
0 引言
現有的袋裝水泥裝車裝備自動化智能化程度較低,裝車設備普遍采用移動式袋裝水泥半自動裝車機,該種裝車機采用半自動化的裝車方式,其裝車終端為工人站在貨車車箱內部托舉水泥的方式進行裝車。該裝車方式存在勞動強度大、人力成本高、各工序人員密度大、安全系數低和自動化智能化水平低等缺陷。這種現狀無法滿足水泥行業智能化高標準的發展要求,有待升級和改造。這種轉變是社會發展與科技進步的必然結果,但同時也給水泥包裝運輸行業帶來了轉型的重大契機。
1 袋裝水泥智能機器人裝車系統
袋裝水泥智能機器人裝車系統是一種由工控機、PLC、機器人等主要控制系統元件組成的無人化智能化機器人自動裝車生產線,流程圖見圖1,效果圖見圖2。設計生產能力95~100t/h,全流程無人化生產,由車輛調度系統、自動插袋、自動包裝、破包剔除、自動矯正、自動計量、車輛定位及車廂檢測、機器人抓取碼垛、信息化平臺等關鍵工藝組成,適用于新建或舊生產線的改造。
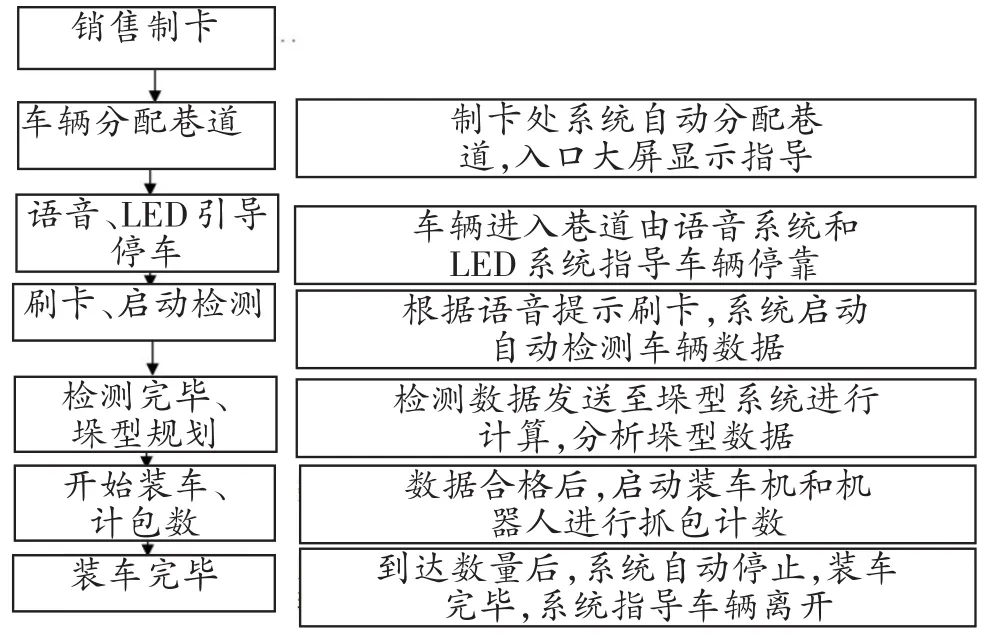
圖1 裝車系統的流程圖

圖2 袋裝水泥智能機器人裝車系統效果圖
1.1 車輛調度系統
車輛調度系統是根據銷發系統數據和車輛信息進行巷道分配及車輛引導,按需分配裝車數量,指導車輛進入袋裝水泥發運巷道,同時具備臨時調配功能,該系統的應用提高了車輛入場效率。
車輛入廠前自動制卡,將卡號、車牌號、品種、噸位、車輛長寬高等關鍵信息錄入廠區銷發系統數據庫,車輛調度系統服務器周期性讀取并同步銷發系統數據庫,將銷發系統數據存儲至車輛調度系統服務器,并周期性進行更新。車輛進入地磅進行刷卡時,自動調取車牌號、品種、噸位、車輛長寬高,車輛調度系統根據設定的條件分配巷道,調度大屏同步顯示相關信息,同時語音播報車輛分道信息。車輛裝車完畢后自動清除該車輛信息。
不同車型的車輛入廠時自動分配巷道,具備按需平均分配及臨時調度分配功能。車輛入廠刷卡,根據刷卡卡號從發運系統里讀取車牌號、品種、車輛規格3個關鍵參數與自動裝車道系統進行比對,車輛調度系統根據自動裝車系統的狀態及已分配情況自動分配,當自動裝車道出現問題無法繼續裝車系統臨時調配車輛換道裝車。
1.2 自動插袋和包裝
袋裝水泥自動插袋機是一種與水泥包裝機結合的自動插袋裝置,適宜與回轉式水泥包裝機配套使用,具有節省勞動力、降低生產成本、提高工作效率、減少環境污染等優點。該裝置可以從根本上解決工人在惡劣環境工作的現狀,實現了無人化,更環保。
車輛進入巷道,刷卡讀取銷發系統噸位數據,裝車系統自動檢測車輛數據后啟動輸送線、包裝機和插袋機,包裝機應處于勻速轉動狀態,插袋機的吸袋機構在氣缸的驅動下動作,吸起一個水泥袋,使其上半部分呈豎直狀態,在吸盤的配合下將袋口吸開。然后,插袋機械手在氣缸驅動下,完成夾袋動作,同時,機械手的結構可以保持袋口張開的狀態。下一步,開口吸盤斷氣,為機械臂動作做好準備。再下一步,轉運機械臂帶動水泥,包裝機上的出灰管擺動,機械手保持加持狀態,確保水泥袋口處于張開狀態。此后在轉運機械臂的驅動下,機械手將袋子套入包裝機上的出灰管。袋子就位后,機械手釋放夾袋動作,使夾袋機構張開,以確保轉運機械臂復位時不會發生干涉碰撞。
1.3 破包剔除
包裝機出包后通過復檢秤,需要將每包水泥的重量進行復核,重量控制在50±0.2kg,通過系統堆棧原理將通過復檢秤的袋裝水泥重量與包裝機出灰嘴進行一對一綁定,并將重量偏差值進行閉環反饋調節,通過包裝機本體PID的調節方式控制包裝機出灰嘴的出灰量,該調節的控制量在±0.5kg,一旦檢測重量超出0.5kg,系統默認該袋裝水泥為破包,復檢秤發出開關量信號至剔除機,剔除機將破包水泥剔除并進行破袋處理。
1.4 自動矯正、計量
自動裝車系統對來料數量要求嚴格,通過輸送線上的袋裝水泥進行在線連包檢測及連包分離處理,實現計數準確,提高了車輛發運噸位的準確性,降低了出廠返車率。
自動矯正裝車布置與主輸送線上,通過前端兩對光電檢測開關檢測到有連包時,自動矯正裝置將第2包夾緊,夾緊的同時將包矯正,避免了輸送線刮包和包歪的問題,保證了袋裝水泥產品的質量,同時也提供了機器人抓取的效率。矯正分離裝置夾緊延時夾緊0.5s,將包距離拉開0.4m。
袋裝水泥在輸送線上計數采用對射光電開關進行計量,剔包機后布置一對光電開關進行計數,其計數控制包裝機的發包數量。各車道分道出口入口布置一對光電,對各車道的來料包數進行統計,確保各車道的數量準確。抓取輥道線上布置了四對光電開關對機器人實際抓取碼垛數量進行計量。通過3個位置的計數進行對比,當實際計量包數與系統刷卡包數一致時,前端輸送皮帶停止,多重保護措施,確保計數準確性。
1.5 車輛定位及車廂檢測
車輛定位方式以語音系統實時提示車輛停車,以車輛尾部欄板作為基準點,通過檢測的欄板數據PLC程序計算尾欄板在系統坐標中的X值,即機器人放包的基準位置。
采用5個高精度激光測距傳感器安裝于機器人上。X軸正負方向各安裝2個激光測距傳感器,通過X軸方向的激光測距傳感器檢測的數據可以計算出車廂長度、車廂尾板X軸坐標值、車輛車頭異性件(水箱)。Y軸正負方向各安裝1個激光測距傳感器,過Y軸方向的激光測距傳感器檢測的數據可以計算出車廂寬度、車輛停靠在系統中的角度、車輛定位的邊距值等。Z軸負方向安裝1個激光測距傳感器,通過該傳感器可以計算出車頭的高度、車廂欄板高度、車輛貨箱底板高度。
首先機器人抓手檢測機構由#1點垂直向下運動,當車頭傳感器檢測到數據后,判斷為跟蹤到車頭,得出車頭高度,同時得出車廂上水箱數據。裝置繼續向下動作,當車寬得到數據后,計算出車廂欄板的高度。當車尾、車寬傳感器數據滿足條件后立即停止,獲取#2點的車長、車寬;裝置由#2點沿Y軸平移至#3點,計算出垂直中心是否有水箱和水箱的厚度,同時得出#3點的車長、車寬;裝置由#3點沿X軸平移至#4點,得出#4點車長、車寬,車廂側板在系統中的Y值;裝置掃描完成后,將掃描的數據進行綜合運算,得出最終的車廂長度(L)、寬度(D)、車廂尾門板值(X)、車廂前Y值(Y1)、車廂后Y值(Y2)、車廂高度值(H)等關鍵參數。
L=L1+L2+L3;D=D1+D2+D3
X=X1-L2;Y1=Y-(L3/L2)×D23

圖3 車輛定位示意圖
Y2=Y-[(D23-D24)/L34]×D24
H=H1+1400
其中:L—車長;D—車寬;X—尾門板值;L3—抓手長度;D3—抓手寬度;X1—機器人標定外部軸值;Y—機器人世界坐標y值;L34—機器人X軸平移距離;D23—檢測#3點的D2值;D24—檢測#4點的D2值。
1.6 機器人抓取碼垛
檢測系統對車輛定位及車廂檢測后計算出車廂長度、寬度、高度和碼垛方式,將數據發送至垛型規劃軟件,生產垛型數據,系統自動調取垛型程序號。主要垛型:4橫1豎、橫包左右交錯、橫包疊加、橫包居中、左右兩包疊加。
初始位置機器人根據可以抓取信號進行抓取和放置水泥,碼垛順序根據碼垛系統計算出來的規則,從車尾開始,成Z型方式碼垛。碼垛算法基于車輛長度自動計算出車廂平面內能放的最大列數,并根據最大列數計算出每一列裝車機需要行進的距離,規定最小距離為400mm。車廂的六層之內,初始位置抓取4次,橫放兩次,豎放兩次,裝車機前進一步,到位后繼續抓取2次,裝車機前進一步,到位后繼續抓取2次,裝車每走4步之后,機器人抓放4次(兩次橫放、兩次豎放),以此類推,往車頭位置走到與碼垛列數相等的次數位置,再往車尾走。超過第六層后,一般情況下裝車機每走一步機器人抓放兩次,當碼垛規劃出的路線在計算時判定往車尾走一層每步抓放3次可以一次性碼垛完成時,會給出每步抓放3次的規則,機器人在每步抓放的第3次時,自動往車頭位置挪200mm放包,讓剁型更緊湊,降低司機行駛過程中掉包的概率。
機器人每抓取一次,PLC計數一次,直到設定包數等于實際包數時裝車完成,機器人自動回原位,然后裝車機也回原位(X=300mm,Y=200mm),系統自動將車輛數據、裝車數據等清零。
裝車機的狀態、每次裝車的裝車數據、歷史裝車記錄、主線水泥包稱重記錄、整個系統的運行日志、碼垛數據和服務管理系統,更加便捷地控制水泥自動裝車系統,更直觀實時監視各部分狀態,見圖4。

圖4 垛型規劃結構
1.7 信息化平臺
裝車系統信息化平臺分為生產過程管理、基礎信息維護、統計與查詢、系統和窗口五個模塊,可以實時監控每個車道的裝車狀態、裝車數據、故障報警和實時裝車畫面,并進行數據匯總,可以實時查看每日裝車數據,更加便捷地控制水泥自動裝車系統,更直觀地實時監視各車道的運行狀態。
2 袋裝水泥智能機器人裝車系統的應用
2.1 實施效果
公司成功研發的袋裝水泥包裝全流程無人化自動裝車系統,目前已經申請/授權知識產權28件。該系統填補了行業空白,經中國建筑材料聯合會專家鑒定委員會鑒定為“達到國際先進水平”。目前已在湖南益陽海螺水泥、湖南武岡云峰水泥、浙江臺州海螺水泥、安徽全椒、長豐海螺水泥成功投產,裝車能力達95~100t/h,見圖5。改變了包裝發運系統長期依靠人工作業的傳統模式,實現從車輛進廠、自動插袋、包裝、稱重、輸送、裝車到車出廠全過程的無人化,湖南益陽海螺、浙江臺州海螺等公司已成為全行業取消人工勞務裝車的典范。

圖5 裝車效果圖
2.2 和人工裝車的特性對比
機器人裝車和人工裝車的特性對比見表1。

表1 機器人裝車和人工裝車的特性對比
從表1中的數據可以看出,由于采用了水泥袋裝全流程無人化自動裝車系統,完全取代了人工作業,袋裝水泥裝車返廠率明顯降低,發運成本降低了接近60%,粉塵濃度明顯降低,排放標準遠低于水泥行業排放標準。實現了人身、職業健康的本質安全,實現了包裝發運清潔化生產。
3 結語
袋裝水泥無人化智能機器人發運系統使用以來的情況表明,生產線運行順暢、節能環保、運行成本低、裝車效率提高,裝車工藝技術已經成熟,通過水泥行業權威機構檢測,各項指標符合要求,已在水泥行業全面推廣應用,為袋裝水泥發運無人化、智能化工廠邁向新臺階。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32