基于大數據聚類分析的爬壁機器人位姿定位控制系統設計
2022-08-26 05:24:04宋容
計算機測量與控制 2022年8期
宋 容
(成都理工大學 工程技術學院,四川 樂山 614000)
0 引言
爬壁機器人指可以在垂直墻壁上攀爬并完成作業的自動化機器人,其具有較高的模擬狀態,在運動過程中能夠較大程度地復刻生物的位姿,為人類的生活和生產工作提供較大便利[1-3]。由于足式爬壁機器人通過對兩條腿的運動狀態進行協調控制,使得爬壁機器人的運動限制更少,更高的機動性和更快的步行速度,而腿部的機械結構使得它可以輕松地越過大型障礙,并能在最短的時間內適應臺階、凹凸不平的地形,因此該類型的爬壁機器人的應用優勢更加明顯、應用范圍更廣[4-6]。然而爬壁機器人運動涉及的學科較多、交叉性較強,且其內部零件組成結構較為復雜,由此提高了爬壁機器人的操作困難性,容易出現爬壁機器人失穩、移動偏差甚至摔倒等現象[7]。為了解決爬壁機器人運動存在的問題,設計并開發了爬壁機器人位姿定位控制系統。
當前國內外學者已經在爬壁機器人位姿定位控制的研究過程中取得了一定成果。文獻[8]提出基于全局穩定的爬壁機器人位姿控制方法,基于爬壁機器人運動學模型,利用位姿偏移建立滑模傳遞函數,用雙曲函數代替線性函數,測試整體漸近穩定性,并采用逆向設計方法確定雙閉環的穩定性和誤差收斂,達到精確跟蹤的目的。文獻[9]提出基于ECAD 模型的輕型機器人位姿定位控制方法。通過處理 3D 傳感器數據來檢測夾持導線末端的尖端位姿和組件端口位姿,實現機器人定位控制。
爬壁機器人位姿也就是爬壁機器人行走運動產生的整體姿態。從當前的研究情況來看,爬壁機器人位姿定位控制系統主要利用了深度強化學習、遺傳算法、運動發散分量等相關技術,通過應用反饋發現現有的控制系統存在明顯的控制效果不佳的問題,主要體現在控制誤差大、爬壁機器人失穩情況明顯等方面,且控制系統的運行性能存在明顯缺陷。為此,在傳統控制系統的基礎上,引入大數據聚類分析技術。大數據聚類分析是對于動態數據進行精準分析的一門技術,根據數據之間的邏輯關系,將相似的對象劃分成不同的組別。大數據信息以整個網絡空間為背景,對于爬壁機器人的運動問題,能提供的信息更多。通過大數據分析以及聚類技術的應用,以期能夠提高當前爬壁機器人運動狀態的判斷精度,進而實現系統控制效果的提升。
1 爬壁機器人位姿定位控制硬件系統設計
為了實現爬壁機器人的多功能性和全方位行走,同時考慮到其他方面的需要,爬壁機器人位姿定位控制系統必須具備多自由度協調控制、位姿平衡穩定控制、反應速度快等功能。結合爬壁機器人位姿定位控制系統的需求分析結果,從硬件和軟件功能兩個方面進行優化設計。硬件結構為控制系統提供了良好的物質基礎,同時為軟件功能的運行提供工作平臺,圖1為硬件系統的結構優化結果。
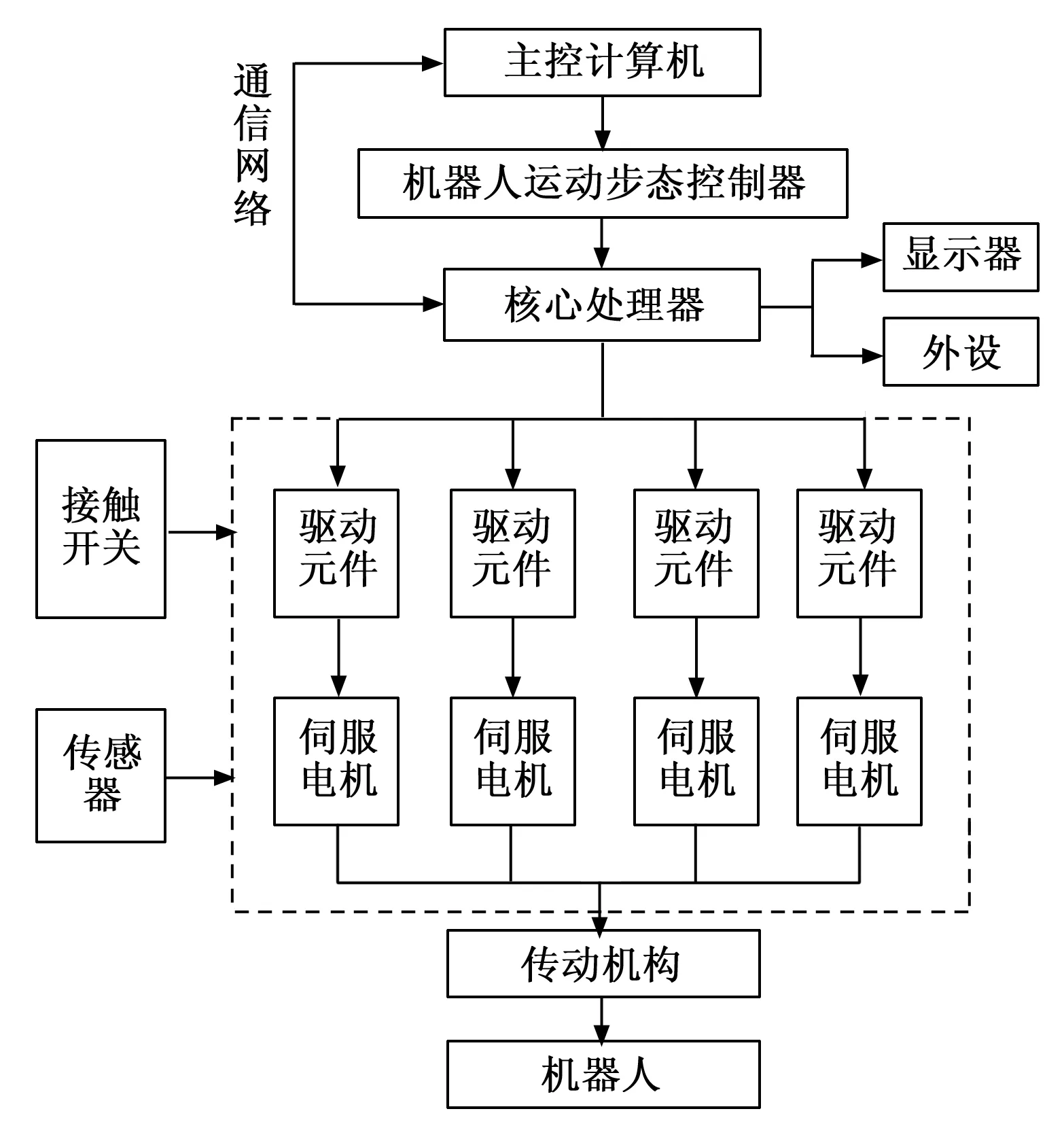
圖1 爬壁機器人位姿定位控制硬件系統結構圖
如圖1所示,系統采用了控制器和主控計算機作為上位機,其接口更加可靠、更加豐富,當需要替換的時候,只要根據相應的接口與所需的下位機相連接即可。對圖1中的部分組成元件進行改裝與優化,提高系統的硬件運行性能。
1.1 爬壁機器人總體結構
爬壁機器人采用仿人體骨架結構,大體可以分為頭部、軀干、四肢3個部分。
為方便研究,在建立爬壁機器人機械結構模型時,將各個零件的結構進行簡化,使其成為一個形狀規則、質量均勻的連桿,并以鉸鏈的形式相互連接,而不會產生摩擦。爬壁機器人機械結構模型的構建結果如圖2所示。
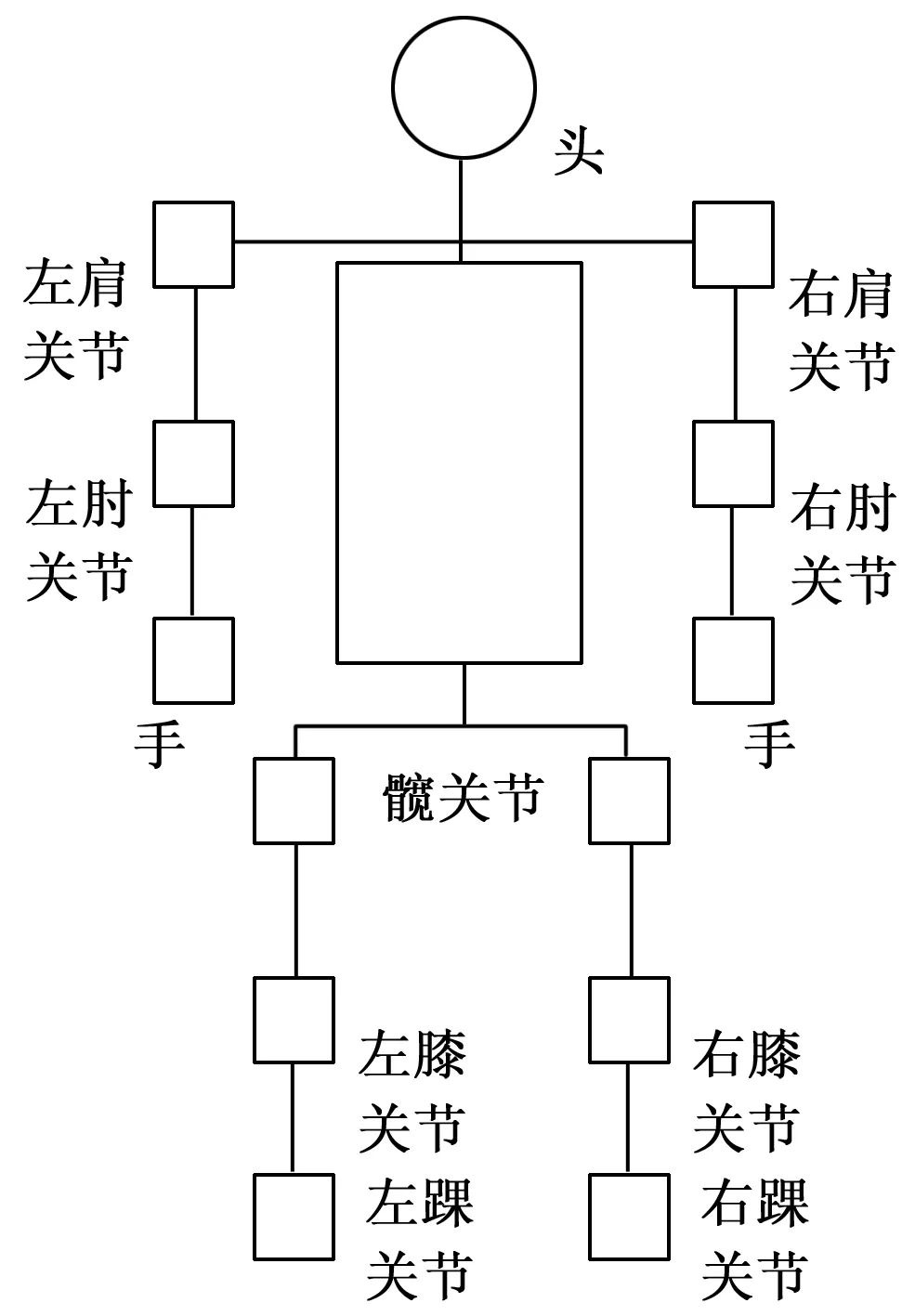
圖2 爬壁機器人機械結構模型
1.2 爬壁機器人位姿傳感器
為了保證行走的穩定性,爬壁機器人必須能夠適應外界環境的變化,及時調整關節的動作。為了實現爬壁機器人的精確位姿定位控制,并在步行過程中維持其穩定性,必須獲得爬壁機器人各個關節的實際位置、姿態信息等實時數據。因此需要安裝傳感器設備,實時監測爬壁機器人運動狀態[10]。選擇九軸傳感器代替傳統系統中的關節傳感器和姿勢傳感器,九軸傳感器設備中的核心元件為MPU9250,包括兩個應用程序的結構。一個是獨立的3-軸磁強計,用于測量關節的實時角,另一個是將3-軸的加速度傳感器和陀螺儀相結合,從而獲得爬壁機器人的姿態、方位和速度等參數。另外,為保證爬壁機器人位姿的控制效果,在系統傳感模塊中加設一個壓力傳感器,用來獲取爬壁機器人與地面接觸的受力數據信息,將其按照圖3所示的方式安裝在爬壁機器人足底位置。
圖3中,O分別表示壓力測點位置,Fzi為壓力值。利用表面貼有電阻膜的壓力傳感器,可以判定爬壁機器人在移動時,足部與地面有無接觸。
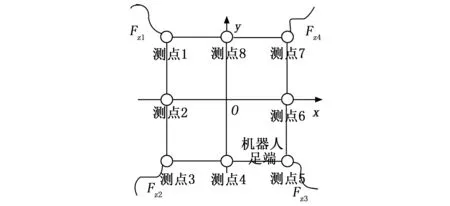
圖3 壓力傳感器安裝位置示意圖
1.3 爬壁機器人驅動元件
采用LD-20MG型數字式舵機為驅動元件,該設備的無負載電流為100 mA,質量為65克。LD-20MG型數字式舵機具有扭力大、虛位差小、精度高等特點。選擇的驅動元件由舵盤、位置反饋電位計、減速齒輪組、直流電機及控制電路板等構成[11]。舵機的控制信號是一個具有20 ms周期的脈寬位置調制信號,在該脈沖寬度在0.5~2.5 ms之間,在相應的輸出軸在0~180°之間具有線性的變化規律。當出現更大的脈沖信號被輸入時,控制信號線就會被調整到新的相應位置,從而達到了爬壁機器人的移動需求。
1.4 爬壁機器人位姿定位控制器
爬壁機器人位姿定位控制器是控制軟件程序的主要運行環境,傳統控制系統中使用的單一控制芯片控制方式,其控制能力較為薄弱,若將其直接與爬壁機器人直接連接,爬壁機器人的前進位姿會出現明顯不穩定現象。因此在優化設計的控制系統中,選擇多控制芯片疊加的方式,優化的控制器結構如圖4所示。
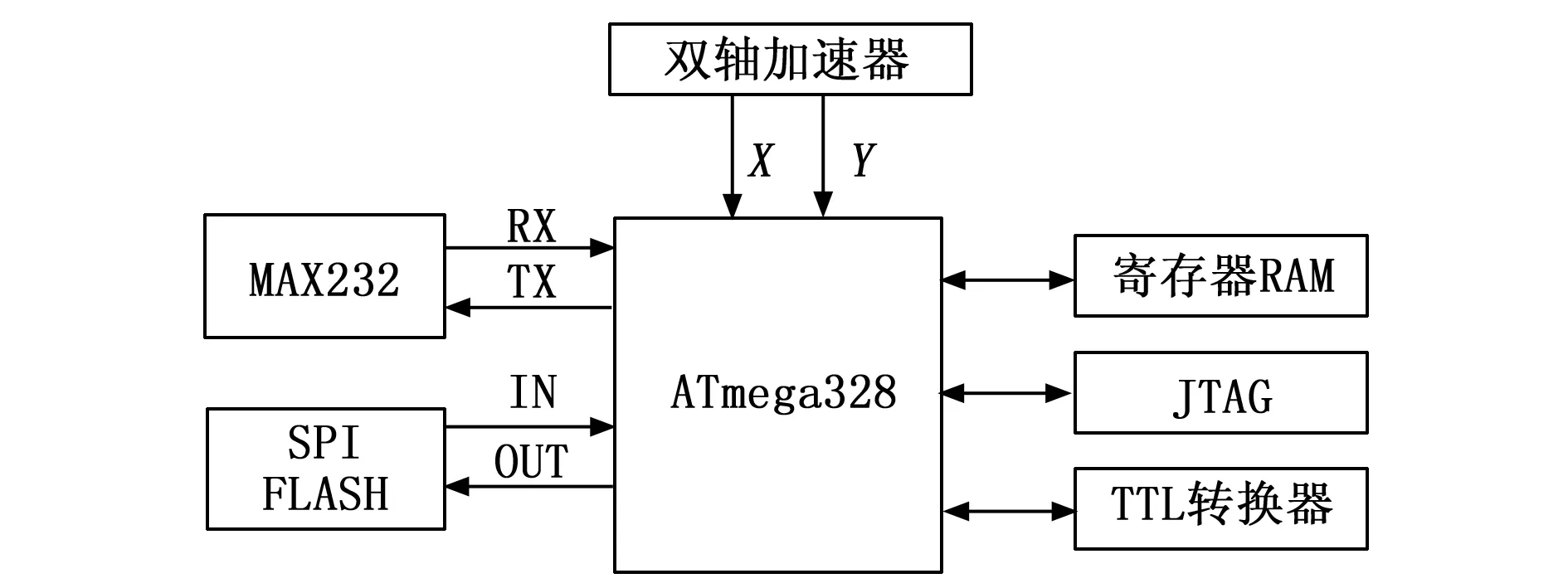
圖4 爬壁機器人位姿定位控制器結構圖
采用ATmega328為主要控制單元,在接到主機的控制命令后,能夠實現對下級的舵機進行同步的控制,具有較大的負荷容量。在控制時,爬壁機器人裝置的實際連接方式不受約束。由于有ATmega328單元,所以整個控制器的外部電壓總是處于一個穩定的值[12]。在爬壁機器人的行走過程中,控制系統的輸出信號中既含有關節角度、轉動時間等物理參數。通常,每個關節的動作和停止動作都是高度一致的,但是如果只有一個關節的動作角度變化,就可以直接由控制器來完成。
1.5 大數據存儲器
為了給實時爬壁機器人位姿監測數據與控制信息提供存儲空間,為大數據聚類分析技術提供充足的數據支持,將傳統系統中的串行同步存儲器改裝成異步存儲器。優化的FIFO存儲器一般使用兩個指針的環形FIFO結構寫入的存儲器地址位于寫入指針中,將第一個被讀取的數據的位置傳輸至讀取指針中。在這種模式下,讀、寫、再傳送都是相同的。所以,要想在字寬上擴大多個 FIFO內存,就需要對各內存的狀態標記進行操作,產生“混合標志”。混合標識還包含全空和全滿兩個標識。這樣, FIFO內存就能保持同步,并達到字寬的擴展。在硬件方面, FIFO存儲器實質上是一個雙口數據存儲器,FIFO存儲器的讀寫指針的改變通常由兩個 SRAM完成,用二進制計數器來完成指針對 SRAM的存儲地址的控制。FIFO控制用兩個時鐘信號來控制存儲器的讀、寫操作,其中的數據被特定的時鐘信號寫到 FIFO,同時由其他時鐘區域的控制信號讀寫 FIFO。與同步 FIFO存儲器相比,它的讀寫指針的改變是由不同的時鐘引起的,兩者是完全獨立的,因而時間控制更加復雜[13]。異步 FIFO存儲器的空、滿的判斷是在不同的時鐘范圍內進行的,因此,在一定的時間段內,FIFO內存很難精確地計算出可供使用的內存。異步FIFO存儲的優化設計結構如圖5所示。
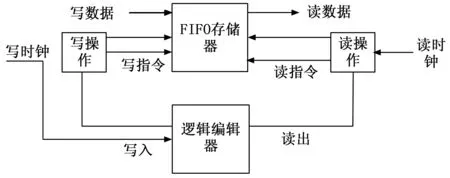
圖5 系統異步FIFO存儲器結構圖
從圖5中可以看出,在數據輸出端增加了兩個單獨的時鐘,以確保輸出數據的穩定。
此外,由于硬件系統所用的器件和器件的改變,對電源的要求也隨之改變,將二極管SR5100串聯起來,利用AMS1117-5、AMS1117-5、AMS1117-Adj實現對電源電壓的變換。除上述硬件設備外,控制信號通信網絡、A/D 信號轉換板、爬壁機器人位姿實時顯示器設備均沿用傳統硬件系統設備,并將其與優化后的硬件設備通過電源電路進行連接。
2 爬壁機器人位姿定位控制系統軟件功能設計
在硬件設備的支持下,以爬壁機器人的機械結構和運動原理為基礎,結合其實時運動狀態和不同位姿的基本特征,在爬壁機器人整體穩定的前提下,通過對擺腿順序、足端軌跡、跨步以及轉角等參數的控制,實現爬壁機器人的位姿定位控制功能。
2.1 建立爬壁機器人機械結構與運動模型
爬壁機器人每條腿上包括髖關節、膝關節和踝關節,各個關節的運動范圍如表1所示。
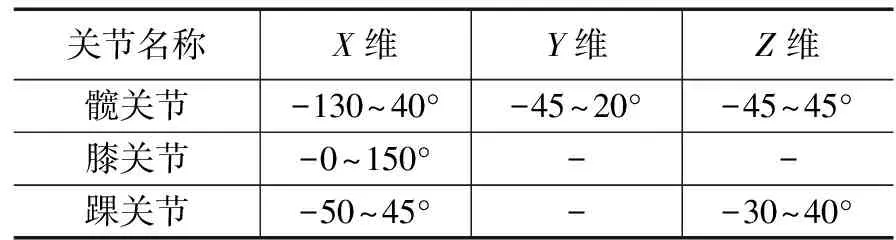
表1 爬壁機器人關節運動范圍
定義表1的運動范圍為爬壁機器人關節運動的自由度約束,完成爬壁機器人機械結構模型的構建。在此基礎上,根據爬壁機器人的連桿參數以及關節的運動情況量化描述其運動信息。在已知關節轉角的前提下,定義爬壁機器人足末端坐標為(xfoot,yfoot,zfoot),則此時爬壁機器人腿部的正運動學方程可以表示為:
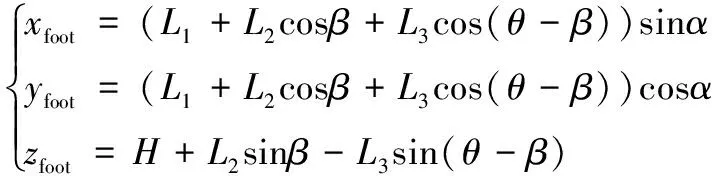
(1)
式中,參數α、β和θ分別為髖關節、膝關節和踝關節的旋轉角度,H為爬壁機器人足末端與地面之間的高度,L1、L2和L3代表關節之間的距離。爬壁機器人在單腿支撐運動狀態下的動態方程如下:

(2)
(3)
式中,▽q表示的是向量q中各組成元素偏微分的行向量,Dq為y相對元素x的偏微分雅克比陣,V表示勢能。同理可以得出爬壁機器人在擺動階段、腳觸地階段、雙腿支撐階段的動態方程,將其與機械結構模型相結合,得出爬壁機器人位姿運動學分析結果。
2.2 采集爬壁機器人實時運行數據
將傳感器設備安裝到爬壁機器人機械結構模型的指定位置上,利用硬件系統中的傳感器設備獲取爬壁機器人的實時運行數據,待采集的運行數據參數包括角速度、步頻、位姿周期以及關節角度等[14]。首先設置傳感器設備的數據采樣間隔時間,清除中斷標志,爬壁機器人實時運行數據以波動信號方式輸出。單位時間內爬壁機器人足端傳感器在水平方向上產生的位移,即為角速度參數采集結果。步頻參數的實時采集數據可以表示為:
(4)
式中,nsteps表示爬壁機器人產生的步數,t為時間。位姿周期指的是同側腳掌相鄰兩側腳跟著地之間所經過的時間,可以通過對傳感器輸出信號的波動頻率直接得出。另外關節角度可以利用九軸傳感器設備直接測量輸出。
2.3 利用大數據聚類分析技術判定爬壁機器人位姿
通過爬壁機器人機械結構模型的構建與分析,能夠確定爬壁機器人各個組成模塊的長度數據,并確定不同位姿形式下爬壁機器人關節的空間關系、位置坐標以及關節角度,并以此作為判定爬壁機器人位姿的比對標準[15]。在此基礎上,定義爬壁機器人實時運行數據采集結果為X,隨機選擇k個聚類中心,利用公式(5)計算選擇聚類中心之間的相似度。
S(k)=g(k)→R
(5)
其中:g(k)和R分別為映射函數和實數域。根據相似度計算結果,劃分k個對象至相似度最小聚類中心,結合大數據聚類分析算法,提取聚類數據信息的特征點,計算公式如下:
(6)
(7)
2.4 規劃爬壁機器人位姿及關節軌跡
爬壁機器人的位姿大體可以分為規則位姿和不規則位姿兩種類型,在規則位姿下爬壁機器人每條腿的周期以及運動軌跡都是固定的,只能在平坦的路面上行進,具體包括對角位姿、跳躍位姿、三角位姿等,而非規則位姿下爬壁機器人腿的運動是非固定的,可以根據不同的路面情況來調整腿部的運動軌跡和周期[16]。由于爬壁機器人的運動位姿涉及支撐相、擺動相、步長、位姿周期、腿相位、占空比等參數,因此在爬壁機器人的運動位姿規劃過程中主要針對上述參數進行設定。其中支撐相和擺動相主要對應的是爬壁機器人腿部與地面直接接觸以及懸空擺動兩種狀態,左右兩腿交替作為支撐相或擺動相。結合爬壁機器人的機械結構,可以得出其運動步長與其腿長之間的關系如下:
(8)
式中,Lleg和Lstep分別為爬壁機器人的腿長和運動步長,vavg為當前運動狀態下的平均速度,可以根據大數據聚類分析技術直接得出vavg的具體取值[17]。腿相位參數指的是兩腿之間的距離,以當前支撐相的位置為固定點,腿相位的取值即為步長規劃值。整個位姿循環可分為兩個階段:支撐相階段和擺動相階段。腳部的上舉是支撐相階段的終點和擺動相階段的開端,而腳部的落點則是擺動相階段的終結和支撐相階段的起始[18]。那么在爬壁機器人位姿的規劃過程中,可以結合爬壁機器人的運動目標,確定任意時刻爬壁機器人各個關節和組成結構的所處位置及位姿參數的規劃結果。以規則位姿中的對角位姿為例,其運動位姿時序規劃結果如圖6所示。
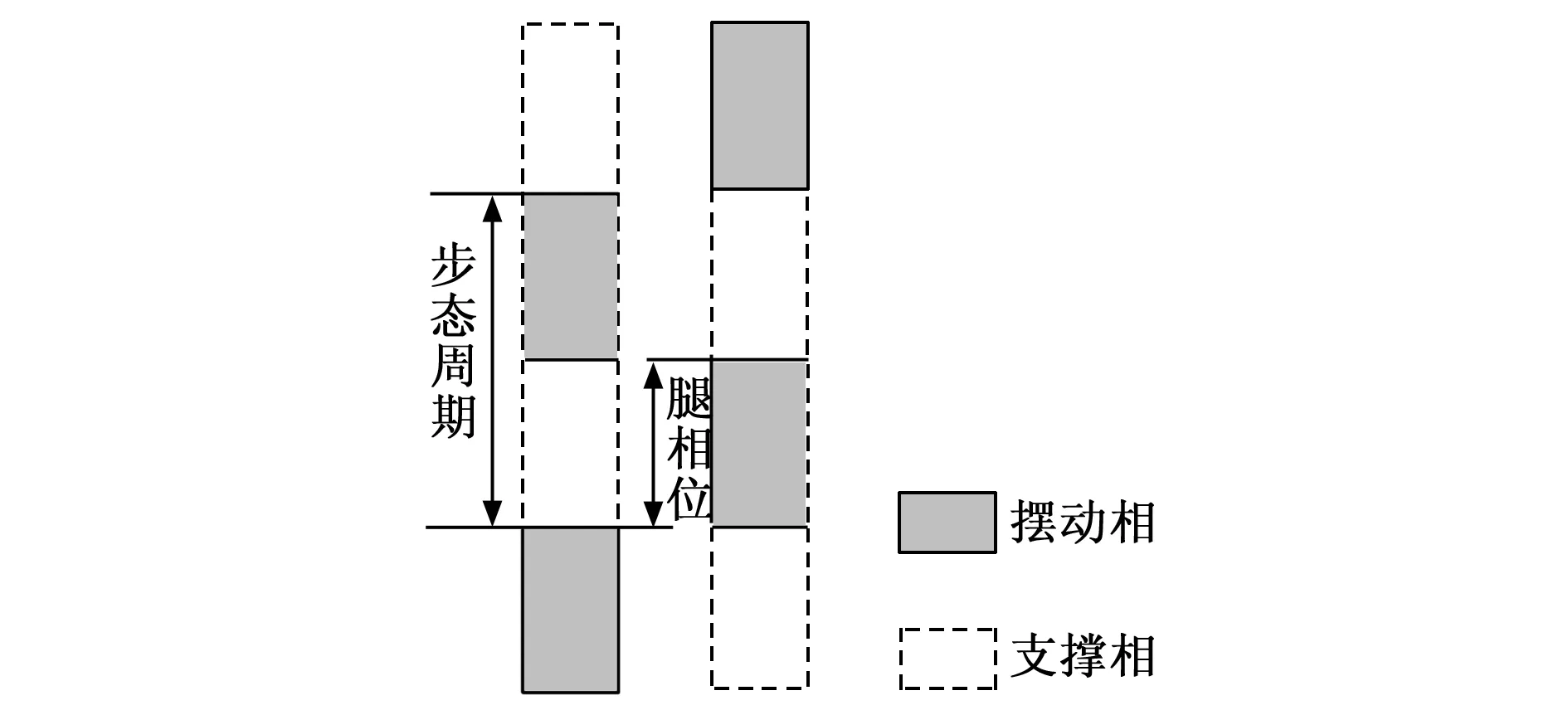
圖6 爬壁機器人對角位姿規劃時序圖
采用多項式內插法規劃了踝關節的運動軌跡,規劃結果可以量化表示為:
(9)
式(9)的求解結果xankle,swing(t)、yankle,swing(t)和zankle,swing(t)分別為單腿支撐期擺動腿踝關節在X、Y和Z方向上的運動軌跡,t為時間變量,ai、bi和ci分別為常數系數,以運動步長作為約束條件得出參數的具體取值,進而得出式(10)的唯一解。根據擺動相的規劃結果,結合其與支撐相之間的腿相位關系,可以得出支撐相的位姿軌跡規劃結果[19]。同理可以得出不同運動位姿下,爬壁機器人其他關節和組成元件的所處位置,通過大數據的聚類整合,得出最終的位姿規劃結果。
2.5 計算爬壁機器人位姿定位控制量
爬壁機器人位姿的控制量主要為關節角度和角速度,根據爬壁機器人位姿與關節軌跡的規劃結果,可以確定不同時刻爬壁機器人組成結構的關節角度,通過對當前爬壁機器人實時運行數據的采集,利用公式(10)得出控制量求解結果。
(10)
其中:θ和ν表示的是當前采集的關節角度數據和運行速度數據,θtarget為規劃位姿結果設定的關節目標角度,若計算得出的Δθ為負數,則需要向逆時針方向調整關節角度,否則關節角度的調整方向為順時針方向,而Δν取值為負,需要通過增大關節之間的摩擦力,執行減速操作,否則向正方向增大運動角速度[20]。
2.6 實現爬壁機器人位姿定位控制功能
將爬壁機器人位姿定位控制量計算結果輸入到硬件系統的控制器設備中,將其轉化為關節驅動力矩,實現對實時爬壁機器人姿態的控制,保證爬壁機器人的實時運行位姿與規劃結果一致[21]。在位姿定位控制的過程中,需要保證爬壁機器人的運動穩定,因此在不考慮爬壁機器人行走方向的情況下,利用公式(11)判斷爬壁機器人位姿是否穩定。

(11)
式中,κh和κr分別為爬壁機器人前向和側向的行走穩定參數,ωhi和ωri為兩個方向上的加權系數,而μX-Y、μY-Z以及μX-Z為XY、YZ和XZ三個空間維度上的方位角度。設置κ為爬壁機器人運動穩定臨界值,若式(11)的計算結果高于臨界值,則判定當前爬壁機器人處于失穩狀態。此時通過改變爬壁機器人的步長和步頻,調整爬壁機器人的步長以及腿相位,同時使足端與地面保持平行,使其在一定的步長范圍內恢復穩定步行[22]。為了不影響爬壁機器人位姿定位控制主程序的運行,穩定控制程序處于并行狀態,并與控制主程序同步運行,即在保證爬壁機器人穩定運動的前提下,實現系統的位姿定位控制功能。
3 系統測試
系統測試研究是基于大數據聚類分析的爬壁機器人位姿定位控制系統開發的重要環節,通過實驗驗證可以進一步評估設計控制系統的可行性,并針對軟件系統運行存在的問題進行改進和修正。此次系統測試實驗主要針對系統的位姿定位控制功能進行測試,通過測試結果數據的分析,判定設計系統是否滿足設計與應用要求。
3.1 準備爬壁機器人測試樣機
實驗選擇Paints型號的雙足爬壁機器人作為系統測試樣機,該爬壁機器人的尺寸大小約為600 mm*200 mm*200 mm,爬壁機器人質量為5.96 kg,自由度能夠達到25以上,在正常使用情況下能夠保持90分鐘待機,內置直流電機作為動力驅動設備,額定轉矩為5.0 mNm。選擇的爬壁機器人樣機腿部氣動肌肉的型號為DMSP-10-144N-RM-CM,其內徑和額定長度分別為8.0 mm和127 mm,最大許用收縮、預張緊量分別為額定長度的20%和3%,最大遲滯和松弛量不高于額定長度的2%。爬壁機器人的每一條腿都包含兩個相互對抗的鉸鏈,每一個鉸鏈都有一對氣動肌肉。一共有8個關節,即這臺爬壁機器人一共需要18塊空氣肌肉。為了確保整個輕便爬壁機器人的髖關節固定在軀干上,腿部與水平方向的角度為85°。髖部連接部位采用弧形長孔,使大腿與水平方向的角度從15~60°不等。小腿和膝蓋之間的連接處,也有一個弧形的長孔,這樣可以讓你的小腿和水平面的角度在15~100°之間改變。該設計可以任意調節大腿和小腿的初始角度,增加了機械調節的靈活性,同時也為以后的研究增加了可能。在大腿、小腿關節處,在關節轉軸上安裝了一個角度傳感器。試驗表明,當每個氣動肌肉的最大搖擺角為24.5°時,其預受力為10%左右是最好的。爬壁機器人的腳部采用了一種半圓形的橡膠球體,由尼龍材質的連接部分與腿部的底部連接,從而達到減震的效果。
3.2 生成爬壁機器人位姿定位控制實例
實驗共設置8個不同的爬壁機器人位姿定位控制目標,位姿內容包括直行位姿、曲線行走位姿、定向轉向位姿、對角位姿等,每個控制目標實例的步行距離、位姿周期等參數均不同。編號01直行位姿實例的目標如圖7所示。
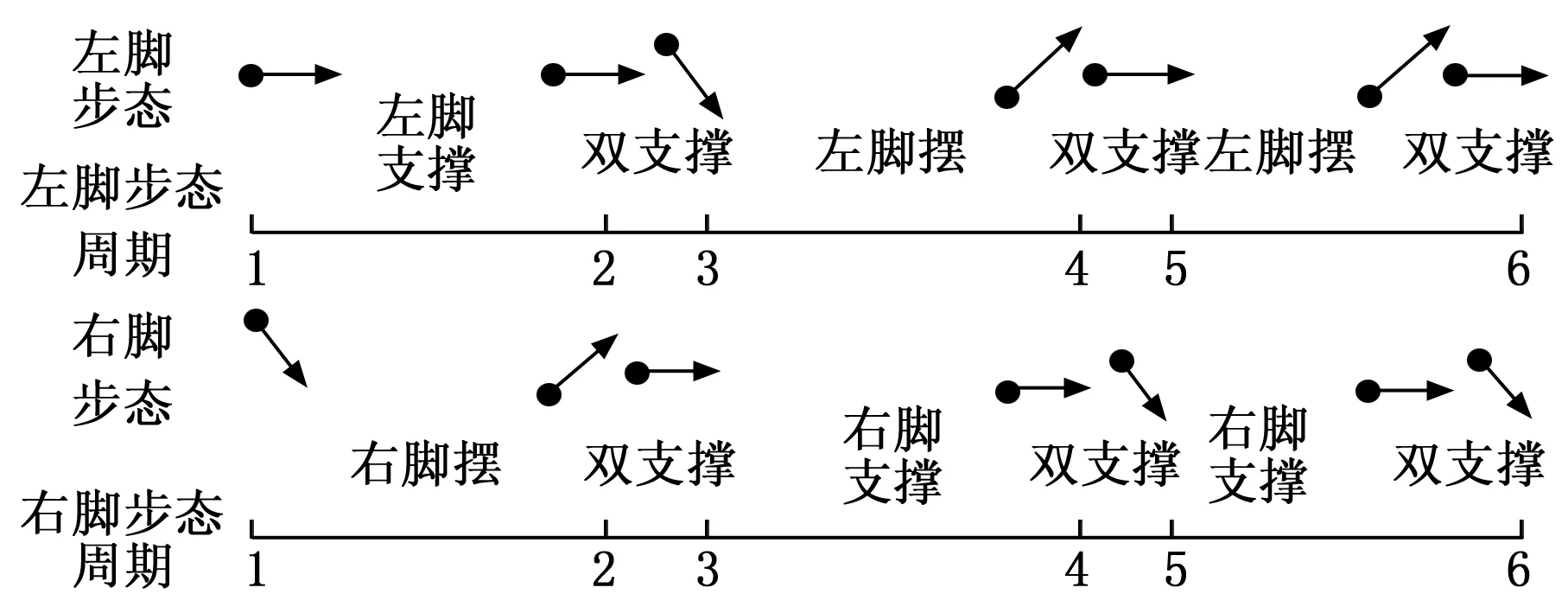
圖7 爬壁機器人位姿定位控制目標實例示意圖
編號01直行位姿實例的步行距離為15 m,擺動角速度控制目標為0.5°/s,位姿周期為10 s。同理可以得出其他位姿定位控制目標實例的具體生成結果,并記錄不同時刻爬壁機器人關節以及組成部分的位置與角度參數,以此作為判斷設計位姿定位控制系統控制效果的比對數據。
3.3 配置爬壁機器人位姿定位控制實驗場景
為了測試爬壁機器人位姿定位控制系統在不同環境下的適用性,實驗設置平地環境和不平坦環境作為實驗的兩個場景。選擇某實驗室平臺作為平地實驗場景,確保該場景表面無明顯凹陷與凸起,在此基礎上加設若干個紙板,并以不規則的形式分布在平地環境內部,實現不平坦環境的配置。上述兩個實驗場景都采用了可變速度的帶式運輸機,并在運輸機周圍安裝了一種鋁合金防護架,在防護架的上面安裝了一個懸架,爬壁機器人被吊在了吊架下面。利用鋼索的牽引,當爬壁機器人在移動中發生不穩定狀態時,仍能保持其穩定,并能有效地保護其安全,防止其因動作不穩而發生損壞。配置的兩種實驗場景均覆蓋無線通信網絡,保證控制信號的穩定傳輸。
3.4 設置系統測試指標
此次系統測試實驗主要針對位姿定位控制效果進行測試,其中位姿定位控制效果設置測試指標包括爬壁機器人的足端軌跡控制誤差、關節角度控制誤差和占空比控制誤差,其中足端軌跡控制誤差的數值結果為:
εposition=|xtar-xact|+|ytar-yact|
(12)
式中,變量(xtar,ytar)和(xact,yact)分別為爬壁機器人足端的目標位置和實際位置的坐標值。由于此次實驗未設置跳躍、下蹲等位姿,因此無Z方向運動。另外關節角度控制誤差和占空比控制誤差的數值結果可以表示為:
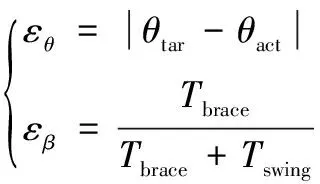
(13)
其中:θtar和θact為爬壁機器人任意關節的控制目標值和實際值,Tbrace和Tswing對應的是位姿支撐相時間和擺動相時間。計算得出εi的值越大,說明設計爬壁機器人位姿定位控制系統的控制效果越差,因此確定3個誤差測試指標的預設值分別為0.5、0.3°和0.05。
3.5 爬壁機器人位姿定位控制系統測試過程與結果分析
在配置好的爬壁機器人位姿定位控制實驗場景下,將準備的爬壁機器人樣機放置其中,并連接控制系統中的硬件設備。在完成硬件調試的情況下,同時啟動爬壁機器人和控制系統軟件程序,將生成的位姿定位控制實例數據逐一代入到系統中,通過控制信號的傳遞以及控制器的運行,完成爬壁機器人的位姿定位控制。平地實驗場景下,直行位姿實例的控制運行結果如圖8所示。
同理可以得出兩種實驗場景下,所有控制任務的實現結果,并記錄爬壁機器人的實時運動數據。通過足端軌跡位置數據的收集與統計,得出足端軌跡控制誤差測試結果,如圖9所示。
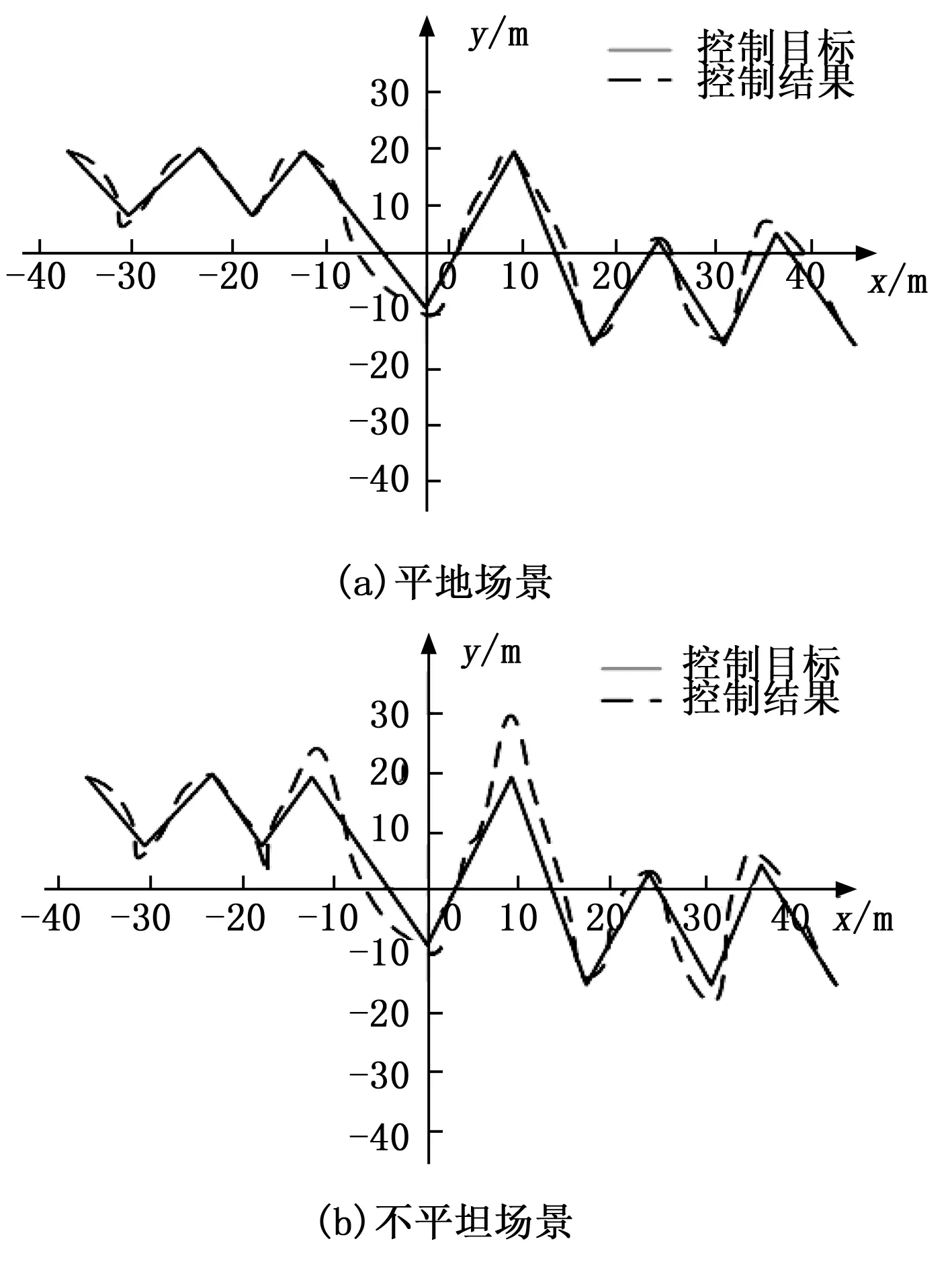
圖9 足端軌跡路線對比
將圖10中的數據代入到公式(12)中,計算得出εposition的平均值為0.34,低于預設值。
為進一步驗證設計系統的準確性,采用文獻[8]方法為實驗對比方法,對比測試關節角度控制誤差和占空比控制誤差的測試結果,如表2所示。
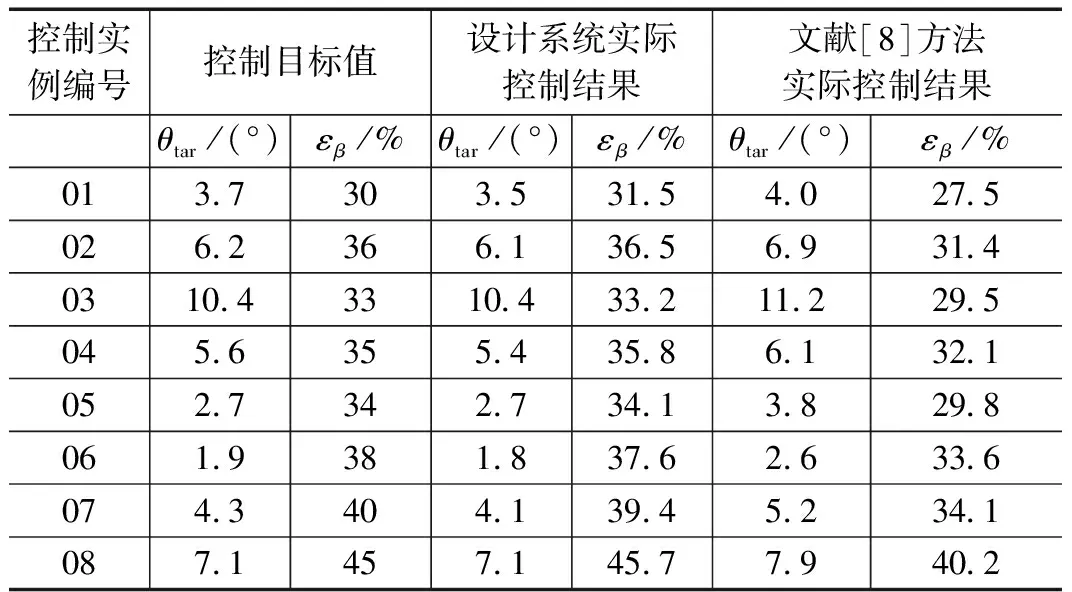
表2 設計系統位姿定位控制精度測試數據表
將表2中的數據代入到公式(13)中,計算得出設計系統的εθ誤差平均值為0.1°,εβ誤差平均值為0.6%,明顯低于文獻[8]方法的控制誤差。由此證明,設計的基于大數據聚類分析的爬壁機器人位姿定位控制系統的控制功能滿足設計與應用要求。
4 結束語
爬壁機器人作為智能時代發展的產物,已經在諸多領域得到應用,爬壁機器人的關節靈活性以及運動精準度決定了其應用價值。通過大數據聚類分析技術的應用,有效地解決了爬壁機器人的運動位姿控制問題。然而受到時間和空間的限制,系統測試實驗設置的用例數量較少,且未對系統的運動穩定控制效果進行測試,因此在設計系統投入應用之前,還需要對實驗數據進行補充。
