基于數(shù)傳電臺的靶彈微波源輔助控制系統(tǒng)設(shè)計
2022-08-26 05:24:08劉基睿
計算機(jī)測量與控制 2022年8期
王 剛,劉基睿,杜 江
(中國人民解放軍91851部隊,遼寧 葫蘆島 125001)
0 引言
靶彈用于模擬敵方來襲的導(dǎo)彈,是考核鑒定防空武器防空反導(dǎo)能力的重要靶標(biāo)[1],用攔截靶彈的試驗結(jié)果評價防空武器系統(tǒng)性能的可信度,在很大程度上取決于靶彈模擬敵方導(dǎo)彈的逼真程度,因此靶彈除了能夠模擬敵方導(dǎo)彈的飛行速度與高度等彈道特征外、還需要模擬導(dǎo)彈微波與紅外等輻射特性[2]。靶彈的微波源可以模擬敵方導(dǎo)彈末制導(dǎo)雷達(dá)的電磁輻射特性,靶彈給防空武器供靶時,需要控制微波源天線實時對準(zhǔn)防空武器所在目標(biāo)艦以模擬敵方導(dǎo)彈末制導(dǎo)雷達(dá)的工作過程[3]。
某型靶彈由退役的飛航式反艦導(dǎo)彈改裝而成,原導(dǎo)彈末制導(dǎo)雷達(dá)改裝成微波源[2]。利用退役導(dǎo)彈改裝靶彈可以節(jié)約導(dǎo)彈退役報廢費用和防空導(dǎo)彈用靶費用,是一種經(jīng)濟(jì)而有效的靶標(biāo)開發(fā)模式[4-5],但退役導(dǎo)彈改靶彈也存在著因彈上元器件老化導(dǎo)致的故障率高,工作不可靠等問題。由末制導(dǎo)雷達(dá)改裝的微波源較靶彈其它系統(tǒng)技術(shù)狀態(tài)復(fù)雜,故障率更高[2],為提高微波源可靠性,以往的微波源輔助控制系統(tǒng)僅進(jìn)行彈上自主控制,即當(dāng)彈載計算機(jī)判斷微波源波束無法捕捉并穩(wěn)定跟蹤目標(biāo)艦時,利用彈載衛(wèi)星定位信息和預(yù)先裝訂的目標(biāo)艦位置解算出微波源天線的預(yù)定方向并對微波源天線方向進(jìn)行控制。這種方式僅適用于目標(biāo)艦位置固定的情況,且受目標(biāo)艦就位點誤差影響較大;當(dāng)目標(biāo)艦位置不確定時,則無法進(jìn)行天線輔助控制。為使微波源輻射的波束能夠精準(zhǔn)照射目標(biāo)艦,以模擬敵方導(dǎo)彈攻擊時的雷達(dá)微波照射過程,本文對原微波源輔助控制系統(tǒng)進(jìn)行改進(jìn)設(shè)計,使靶彈在飛行供靶過程中微波源能夠穩(wěn)定、可靠、準(zhǔn)確照射目標(biāo)艦。
本文的微波源輔助控制系統(tǒng)基于數(shù)傳電臺開展設(shè)計。靶彈加裝數(shù)傳電臺可以將靶彈飛行的實時位置和彈載設(shè)備工況信息下傳到數(shù)傳地面站[6],同時數(shù)傳地面站能夠?qū)部刂噶詈湍繕?biāo)艦位置信息上傳至彈載數(shù)傳電臺。靶彈作為一種消耗性產(chǎn)品,加裝遙測等專用測控設(shè)備價格昂貴且通用性受到限制[7]。數(shù)傳電臺具有技術(shù)成熟、采購渠道通暢、效費比高、開發(fā)難度小等優(yōu)點[8-9],用數(shù)傳電臺作為靶彈通用型測控設(shè)備可以有效降低成本[10-11]。利用靶彈數(shù)傳電臺安控指令上行鏈路上傳目標(biāo)艦位置信息,用目標(biāo)艦實時位置信息和靶彈實時位置信息解算微波源天線角度進(jìn)而控制輻射源微波波束對準(zhǔn)目標(biāo)艦,可以有效提高輻射源的工作可靠性和對準(zhǔn)精度。靶彈供靶時,靶彈和目標(biāo)艦在視距范圍內(nèi)時彈載微波源開機(jī)工作,視距范圍內(nèi)可以保證彈載數(shù)傳電臺與安裝于目標(biāo)艦的數(shù)傳地面站正常通信。
1 靶彈微波源輔助控制系統(tǒng)總體設(shè)計
1.1系統(tǒng)工作原理
靶彈微波源通過天線輻射微波波束照射目標(biāo)艦并接收目標(biāo)艦反射的微波回波,當(dāng)微波源工作正常時,微波源通過接收照射目標(biāo)艦的回波自動捕捉并跟蹤目標(biāo)艦[12]。微波源能夠輸出天線角度電壓信號、與目標(biāo)艦之間的距離電壓信號、捕捉指令開關(guān)量信號,捕捉指令即微波源捕捉目標(biāo)后發(fā)出該指令。通過天線角度電壓信號、距離電壓信號、捕捉指令信號可以判斷出微波源是否捕捉目標(biāo),捕捉的目標(biāo)是否為目標(biāo)艦。當(dāng)微波源無法捕捉目標(biāo)或捕捉的目標(biāo)不是目標(biāo)艦時,靶彈微波源天線輔助控制系統(tǒng)將根據(jù)靶彈與目標(biāo)艦的位置解算微波源天線的理論角度,向微波源輸出輔助控制指令和天線指向控制電壓對微波源天線進(jìn)行控制。
1.2 系統(tǒng)硬件方案
圖1是靶彈微波源輔助控制系統(tǒng)組成示意圖,該系統(tǒng)由安裝于靶彈上的彈載微波源輔助控制設(shè)備和數(shù)傳地面站組成,靶彈供靶時數(shù)傳地面站布設(shè)在目標(biāo)艦上。彈載微波源輔助控制設(shè)備安裝在靶彈上,該設(shè)備由微波源輔助控制計算機(jī)、數(shù)傳電臺、衛(wèi)星導(dǎo)航接收機(jī)等設(shè)備組成。圖中航向角電壓信號是靶彈航向陀螺輸出的信號,零點啟動指令是靶彈起飛時刻發(fā)出的指令。微波源輔助控制計算機(jī)可以對天線角度電壓、距離電壓、航向角電壓模擬量、捕捉指令、零點啟動指令開關(guān)量進(jìn)行采樣,同時輸出輔助控制指令開關(guān)量信號和天線指向控制電壓模擬量信號;通過串口接收衛(wèi)星導(dǎo)航接收機(jī)的衛(wèi)星定位數(shù)據(jù)和數(shù)傳電臺接收的目標(biāo)艦位置信息。數(shù)傳地面站由數(shù)據(jù)處理計算機(jī)、數(shù)據(jù)綜合器、數(shù)傳電臺、衛(wèi)星導(dǎo)航接收機(jī)組成。數(shù)據(jù)處理計算機(jī)用于接收、處理、顯示靶彈下傳的工作狀態(tài)數(shù)據(jù)以及目標(biāo)艦的位置數(shù)據(jù);數(shù)據(jù)綜合器用于接收衛(wèi)星導(dǎo)航接收機(jī)數(shù)據(jù)、向數(shù)傳電臺發(fā)送目標(biāo)艦位置數(shù)據(jù)、接收靶彈數(shù)傳電臺收到的靶彈工作狀態(tài)數(shù)據(jù),同時對數(shù)傳電臺上行和下行數(shù)據(jù)的傳輸時隙進(jìn)行分配。
圖1 靶彈微波源輔助控制系統(tǒng)框圖
1.3 微波源天線指向角計算方法
在靶彈供靶過程中,當(dāng)微波源無法捕捉并跟蹤目標(biāo)艦時,微波源輔助控制系統(tǒng)根據(jù)靶彈位置和目標(biāo)艦位置計算微波源的天線指向角。靶彈位置和目標(biāo)艦位置在靶彈發(fā)射坐標(biāo)系下計算,已知靶彈發(fā)射點的經(jīng)度為L、緯度為B、高度為H、射向為α;靶彈飛行時,彈載衛(wèi)星導(dǎo)航接收機(jī)實時輸出靶彈的地心直角坐標(biāo)系坐標(biāo)X1、Y1、Z1,要獲取靶彈的發(fā)射系坐標(biāo),可用以下公式計算[13]:

(1)
(2)
(3)
(4)
(5)
式(1)~(5)中,a為地球橢球長半徑,e為子午橢圓第一偏心率,地球橢球參數(shù)均采用WGS-84坐標(biāo)系參數(shù)。X0、Y0、Z0是發(fā)射點地心直角坐標(biāo),A11~A33為發(fā)射點地心直角坐標(biāo)到發(fā)射系坐標(biāo)的坐標(biāo)變換矩陣,XD、YD、ZD為靶彈的發(fā)射系坐標(biāo),其中XD指向靶彈發(fā)射方向,ZD即為靶彈彈道側(cè)偏值。目標(biāo)艦在靶彈發(fā)射系坐標(biāo)下的位置坐標(biāo)XJ、YJ、ZJ同樣可以用式(5)的計算方法得出。已知位于目標(biāo)艦上的數(shù)傳地面站衛(wèi)星導(dǎo)航接收機(jī)實時輸出的地心直角坐標(biāo)為X2、Y2、Z2,則目標(biāo)艦在靶彈發(fā)射系坐標(biāo)下的位置坐標(biāo)XJ、YJ、ZJ計算過程如公式(6):
(6)
圖2是靶彈和目標(biāo)艦在靶彈發(fā)射坐標(biāo)系下的位置示意圖,該靶彈航向控制通道采用航向角PID穩(wěn)定控制回路,為了抵消側(cè)向風(fēng)對靶彈彈道側(cè)偏的影響,靶彈發(fā)射時會裝定風(fēng)修角[14],裝定風(fēng)修角將使靶彈飛行時會存在一個航向角φ,因此計算靶彈微波源天線指向角時,需要考慮航向角φ對微波源天線指向角的影響。圖2中β是發(fā)射坐標(biāo)系下目標(biāo)艦與靶彈發(fā)射方向的夾角,φ是靶彈航向角,q是目標(biāo)艦與靶彈彈軸方向夾角,即微波源的天線指向角。圖中角β可由公式(7)計算,因此q可由公式(8)計算,靶彈和目標(biāo)艦距離用公式(9)計算。
圖2 靶彈和目標(biāo)艦在靶彈發(fā)射坐標(biāo)系下的位置示意圖

(7)
(8)
(9)
2 微波源輔助控制設(shè)備硬件與軟件設(shè)計
2.1 硬件設(shè)計
彈載微波源輔助控制設(shè)備電路示意圖如圖3所示,該設(shè)備由接口適配電路、計算機(jī)模塊、數(shù)傳電臺和衛(wèi)星導(dǎo)航接收機(jī)組成。接口適配電路由模擬電壓信號運放電路、開關(guān)量隔離電路和繼電器控制電路組成。該型靶彈飛行控制系統(tǒng)采用模擬電路體制[15],彈上模擬量電壓信號范圍為±15 V,開關(guān)量信號電壓范圍為0/+27 V,而計算機(jī)模塊為數(shù)字電路,AD、DA芯片采樣和輸出的模擬量電壓范圍為±10 V,開關(guān)量信號電壓范圍為0/+3.3 V,接口適配電路可以對靶彈信號和計算機(jī)模塊之間傳輸?shù)男盘栠M(jìn)行適配和控制。圖3中運放U1、U2、U3、U4構(gòu)建了反向比例運算電路對輸入和輸出的模擬量信號進(jìn)行調(diào)壓和隔離。光耦U6將捕捉指令和零點啟動指令隔離后輸出給可編程邏輯芯片用于開關(guān)量采樣。固態(tài)繼電器U5將可編程邏輯芯片輸出的開關(guān)量信號隔離轉(zhuǎn)換成+27 V有效的信號用于控制繼電器K1,繼電器K1用來控制輔助控制指令和天線指向控制電壓的輸出,當(dāng)微波源輔助控制設(shè)備對微波源天線進(jìn)行輔助控制時,K1繼電器常開點閉合,輸出輔助控制指令和天線指向控制電壓;微波源輔助控制設(shè)備不進(jìn)行輔助控制時,K1繼電器常開點斷開,輔助控制指令和天線指向控制電壓輸出端處于懸空狀態(tài)。
圖3 彈載微波源輔助控制設(shè)備電路示意圖
微波源輔助控制設(shè)備計算機(jī)模塊由AD模擬量采樣芯片、DA模擬量輸出芯片、串口隔離芯片、Flash芯片、可編程邏輯芯片和CPU構(gòu)成。AD、DA、串口隔離芯片,F(xiàn)lash與可編程邏輯芯片之間通過數(shù)據(jù)與控制總線進(jìn)行通信;AD、DA芯片用于模擬量采樣與輸出;Flash用于裝定和存儲靶彈發(fā)射點位置、射向等任務(wù)參數(shù);串口隔離芯片以隔離的方式構(gòu)建RS422串行通信端口,用于與數(shù)傳電臺、衛(wèi)星導(dǎo)航接收機(jī)及參數(shù)裝訂設(shè)備進(jìn)行通信;可編程邏輯芯片用于構(gòu)建16位數(shù)據(jù)總線與控制總線,同時構(gòu)建了串口數(shù)據(jù)輸入與輸出緩存用于收發(fā)RS422串口數(shù)據(jù)。可編程邏輯芯片與CPU之間采用并行總線進(jìn)行通信,CPU內(nèi)部用于運行微波源天線輔助控制程序。數(shù)傳電臺與衛(wèi)星導(dǎo)航接收機(jī)選用成熟應(yīng)用的貨架產(chǎn)品,與計算機(jī)模塊之間采用RS422串口進(jìn)行通信。
2.2 軟件設(shè)計
CPU內(nèi)部運行的微波源天線輔助控制程序如圖4所示。該程序可完成接收數(shù)傳電臺、衛(wèi)星導(dǎo)航接收機(jī)的串口數(shù)據(jù),對模擬量和開關(guān)量輸入信號進(jìn)行采樣并判斷靶彈和微波源的工作狀態(tài);根據(jù)靶彈和微波源工作狀態(tài)確定是否輸出輔助控制指令;根據(jù)靶彈位置和目標(biāo)艦位置計算微波源天線角度并由DA芯片輸出;將模擬量與開關(guān)采樣數(shù)據(jù)以及輔助控制設(shè)備的工作狀態(tài)數(shù)據(jù)通過數(shù)傳電臺下傳至數(shù)傳地面站。
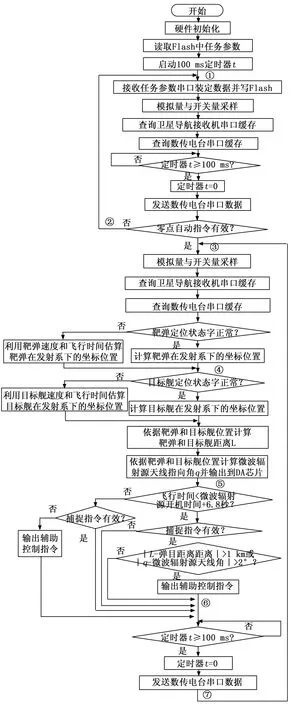
圖4 微波源天線輔助控制程序
圖4中程序以周期循環(huán)的方式運行,循環(huán)周期為0.1 s,每個循環(huán)周期查詢接收一次衛(wèi)星導(dǎo)航接收機(jī)串口數(shù)據(jù)和數(shù)傳電臺串口數(shù)據(jù),發(fā)送一次數(shù)傳電臺串口數(shù)據(jù)。圖4中程序開始后,首先讀取Flash中裝定的任務(wù)參數(shù)而后將定時器置零。程序流程中①到②為靶彈發(fā)控循環(huán),該部分程序在靶彈發(fā)射前的發(fā)射控制階段執(zhí)行,用于接收參數(shù)裝定設(shè)備裝定的參數(shù)、模擬量與開關(guān)量采樣,接收衛(wèi)星導(dǎo)航接收機(jī)和數(shù)傳電臺串口緩存數(shù)據(jù),定時器計時達(dá)到0.1 s后,定時器置零重新計時并向地面站發(fā)送數(shù)傳電臺串口數(shù)據(jù)。發(fā)控流程中最后判斷零點啟動指令的狀態(tài),零點啟動指令無效時進(jìn)入下一發(fā)控循環(huán)。當(dāng)零點啟動指令有效后,程序進(jìn)入飛控循環(huán),即流程圖中③到⑦部分,該部分程序在靶彈發(fā)射后的飛行控制階段執(zhí)行。
飛控循環(huán)程序中,首先執(zhí)行模擬量與開關(guān)量采樣,而后查詢衛(wèi)星導(dǎo)航接收機(jī)和傳電臺串口緩存;當(dāng)衛(wèi)星導(dǎo)航接收機(jī)定位正常時,用公式(5)計算靶彈在發(fā)射坐標(biāo)系下的位置;若衛(wèi)星導(dǎo)航接收機(jī)定位異常,用靶彈飛行速度和飛行時間估算靶彈位置。獲取靶彈位置后,程序判斷數(shù)傳電臺接收到的目標(biāo)艦衛(wèi)星導(dǎo)航接收機(jī)定位狀態(tài);當(dāng)目標(biāo)艦衛(wèi)星導(dǎo)航接收機(jī)定位正常時,用公式(6)計算目標(biāo)艦在發(fā)射坐標(biāo)系下的位置;當(dāng)目標(biāo)艦衛(wèi)星導(dǎo)航接收機(jī)定位異常時,用目標(biāo)艦預(yù)定航速、航向來估算目標(biāo)艦位置。獲取靶彈和目標(biāo)艦的位置后,用公式(9)計算靶彈和目標(biāo)艦距離L、用公式(8)計算微波源天線指向角q并將該角度輸出到DA芯片。程序⑤到⑥用于判斷微波源是否正常捕捉目標(biāo)艦,并在捕捉目標(biāo)艦異常時輸出輔助控制指令。程序⑤到⑥執(zhí)行完畢后,等待定時器時間達(dá)到0.1 s后,定時器置零并發(fā)送數(shù)傳電臺串口數(shù)據(jù),而后重新開始下一個飛控循環(huán)。
3 數(shù)傳地面站硬件與軟件設(shè)計
3.1 硬件設(shè)計
數(shù)傳地面站用于接收靶彈下傳的數(shù)傳電臺數(shù)據(jù),同時上傳地面站的位置信息和安控指令。為實時獲取目標(biāo)艦的位置信息,數(shù)傳地面站需布設(shè)到目標(biāo)艦上。數(shù)傳地面站由數(shù)據(jù)處理計算機(jī)、數(shù)據(jù)綜合器、數(shù)傳電臺、衛(wèi)星導(dǎo)航接收機(jī)組成,數(shù)傳地面站組成如圖5所示。數(shù)傳地面站數(shù)據(jù)處理計算機(jī)用于接收、處理、顯示靶彈下傳的工作狀態(tài)數(shù)據(jù)以及目標(biāo)艦的位置數(shù)據(jù),數(shù)據(jù)綜合器可以接收安控指令、顯示靶彈安控狀態(tài)、發(fā)送目標(biāo)艦位置信息和安控指令信息、接收靶彈數(shù)傳電臺下傳的靶彈工作狀態(tài)數(shù)據(jù),同時對發(fā)送和接收數(shù)據(jù)的傳輸時隙進(jìn)行分配。靶彈有四條安控指令,分別為自檢指令、解鎖指令、復(fù)位指令、自毀指令。自檢指令用于檢查彈上和地面的數(shù)傳鏈路是否正常,自毀指令用于控制靶彈完成自毀,解鎖和復(fù)位指令作為自毀指令的保險使用,在發(fā)自毀指令前需要發(fā)解鎖指令已打開靶彈自毀保險,恢復(fù)靶彈自毀保險則需要發(fā)送復(fù)位指令。
圖5是數(shù)據(jù)綜合器電路原理圖,圖中固態(tài)繼電器U1、U2、U3用于驅(qū)動“電源/數(shù)傳信號”、“地面站定位正常”“自檢”、“解鎖”、“復(fù)位”、“自毀”LED狀態(tài)燈。“電源/數(shù)傳信號”LED燈在數(shù)傳地面站開機(jī)后未收到彈載數(shù)傳電臺信號時處于常亮狀態(tài),當(dāng)數(shù)傳地面站收到彈載數(shù)傳電臺信號時處于閃爍狀態(tài);“地面站定位正常”LED燈用于顯示地面站衛(wèi)星導(dǎo)航接收機(jī)的定位狀態(tài);“自檢”、“解鎖”、“復(fù)位”、“自毀”LED燈可以顯示靶彈下傳數(shù)據(jù)中靶彈的安控狀態(tài)。光耦U4、U5用于隔離檢測“自檢”、“解鎖”、“復(fù)位”、“自毀”按鈕信號,“自檢”、“解鎖”、“復(fù)位”、“自毀”按鈕用于控制數(shù)傳地面站向靶彈發(fā)送安控指令。圖中可編程邏輯芯片除完成開關(guān)量采樣和輸出外,還作為三路RS422串口通信的緩存區(qū)使用,F(xiàn)lash芯片用于存放安控指令碼數(shù)據(jù),CPU芯片用于運行數(shù)傳地面站軟件。
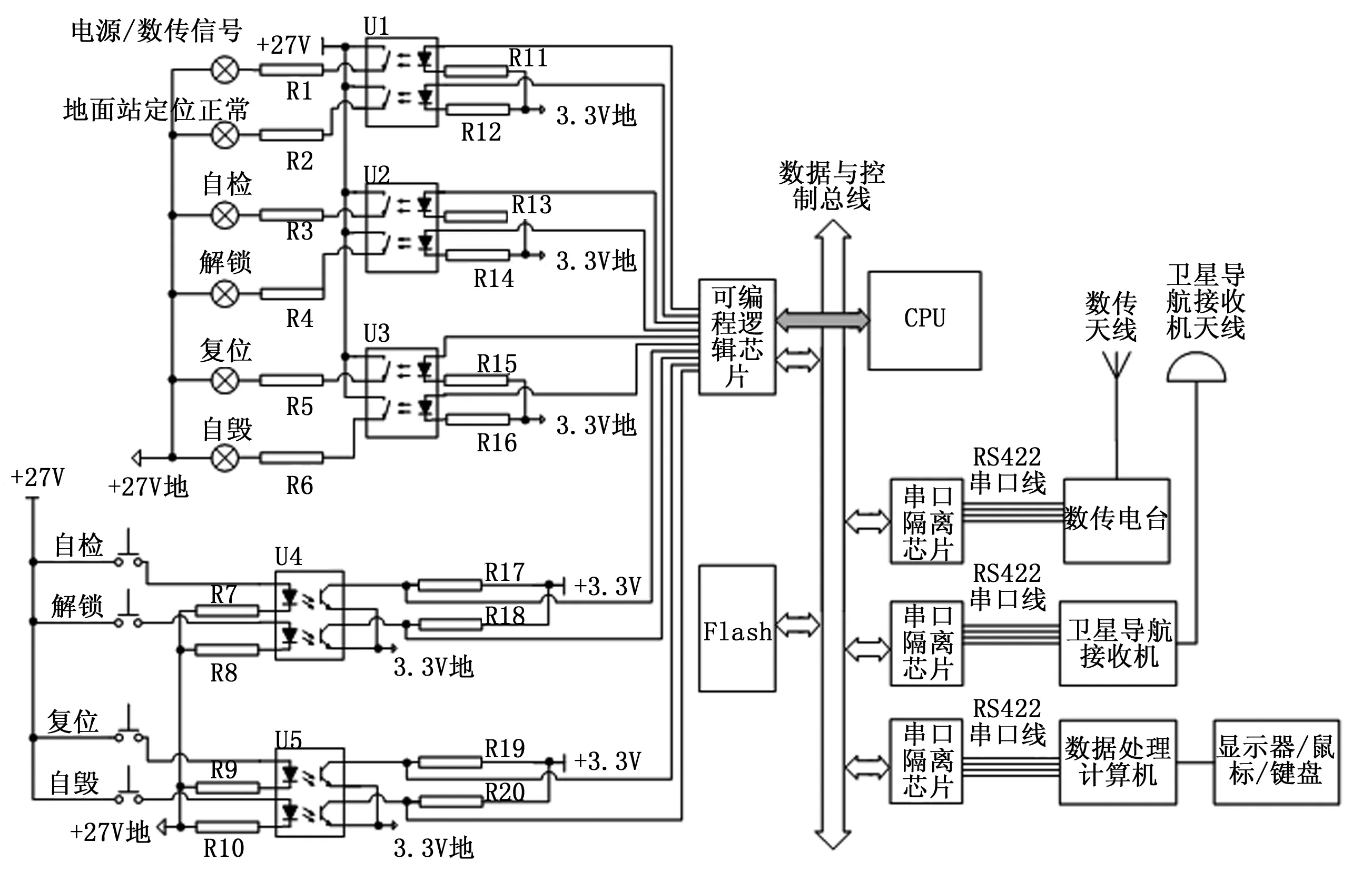
圖5 數(shù)據(jù)綜合器電路原理圖
3.2 數(shù)據(jù)傳輸時隙設(shè)計
因數(shù)傳電臺采用半雙工工作模式,同一時刻只能選擇下傳或上傳一種工作模式,系統(tǒng)工作時需對數(shù)傳電臺的發(fā)送或接收時序進(jìn)行控制,地面站數(shù)據(jù)綜合器可對靶彈下傳數(shù)據(jù)和地面站上傳數(shù)據(jù)時序進(jìn)行控制,彈載數(shù)傳設(shè)備循環(huán)周期為0.1s,即100 ms,數(shù)傳電臺傳輸率為38 400 bps,數(shù)據(jù)格式為8數(shù)據(jù)位、1起始位、1停止位,下傳字節(jié)數(shù)為149字節(jié),彈載數(shù)傳設(shè)備下傳耗時為:149×(1+8+1)/38 400=0.038 8 s=38.8 ms。地面站在接收到靶彈下傳數(shù)據(jù)后,間隔28 ms開始上傳數(shù)據(jù),上傳數(shù)據(jù)長度為20字節(jié),上傳耗時:20×(1+8+1)/38 400=0.0052 s=5.2 ms。圖6為彈載數(shù)傳設(shè)備和數(shù)傳地面站傳輸時隙分配圖,上傳數(shù)據(jù)和下傳數(shù)據(jù)之間間隔28 ms用于電臺的收發(fā)模式轉(zhuǎn)換。
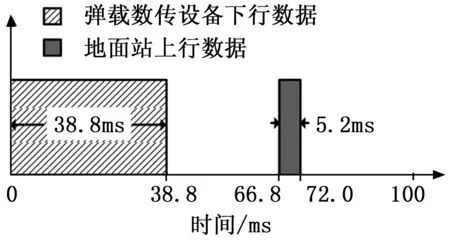
圖6 數(shù)傳時隙分配圖
3.3 軟件設(shè)計
為了能準(zhǔn)確控制上傳數(shù)據(jù)和下傳數(shù)據(jù)的時隙,數(shù)據(jù)綜合器需要對接收到的下傳數(shù)據(jù)進(jìn)行準(zhǔn)確計時,為提高計時精度,數(shù)據(jù)綜合器內(nèi)部軟件采用1 ms為周期的循環(huán)。數(shù)據(jù)綜合器內(nèi)部軟件流程如圖7所示。數(shù)據(jù)綜合器上電后首先進(jìn)行硬件初始化、讀取Flash中的安控指令碼、1 ms循環(huán)計數(shù)置零、安控指令狀態(tài)字置零、啟動1 ms定時器。程序流程中①~②用于開關(guān)量采樣,接收衛(wèi)星導(dǎo)航接收機(jī)和數(shù)傳電臺串口緩存數(shù)據(jù),并對“自檢”、“解鎖”、“復(fù)位”、“自毀”按鈕開關(guān)量采樣結(jié)果進(jìn)行計數(shù)。②~③用于確定“自檢”、“解鎖”、“復(fù)位”、“自毀”按鈕的采樣結(jié)果,為了消除按鈕抖動和干擾,連續(xù)100個循環(huán)采樣均有效時認(rèn)為按鈕采樣有效。程序流程③~④用于判斷地面站衛(wèi)星導(dǎo)航接收機(jī)定位狀態(tài),當(dāng)?shù)孛嬲拘l(wèi)星導(dǎo)航接收機(jī)定位正常時,點亮“地面站定位正常”燈;地面站衛(wèi)星導(dǎo)航接收機(jī)定位異常時,“地面站定位正常”燈熄滅。程序流程④~⑤接收地面站數(shù)傳電臺串口數(shù)據(jù),當(dāng)收到彈上下傳的149字節(jié)完整數(shù)據(jù)幀時,循環(huán)計數(shù)i置零;未收到完整數(shù)據(jù)幀時i進(jìn)行累加計數(shù),當(dāng)i累加到101時停止累加計數(shù)。程序流程⑤~⑥用來控制“電源/數(shù)傳信號”燈顯示,當(dāng)循環(huán)計數(shù)i大于50時“電源/數(shù)傳信號”燈亮,否則“電源/數(shù)傳信號”燈滅,該控制邏輯可以使“電源/數(shù)傳信號”燈在地面站收到彈載數(shù)傳電臺數(shù)據(jù)時閃爍顯示,未收到彈載數(shù)傳電臺數(shù)據(jù)時常亮顯示。程序流程⑥~⑦用于根據(jù)彈上下傳的安控指令接收狀態(tài)控制“自檢”、“解鎖”、“復(fù)位”、“自毀”LED狀態(tài)燈,若循環(huán)計數(shù)i=101則接收彈上下傳的數(shù)據(jù)間隔超過100 ms,此時將“自檢”、“解鎖”、“復(fù)位”、“自毀”LED狀態(tài)燈熄滅。程序流程⑦~①等待1 ms循環(huán)周期結(jié)束,將定時器置零,控制向彈上發(fā)送上行數(shù)據(jù),上行數(shù)據(jù)在i=28時發(fā)送,即接收完下行數(shù)據(jù)等待28 ms后發(fā)送上行數(shù)據(jù)。
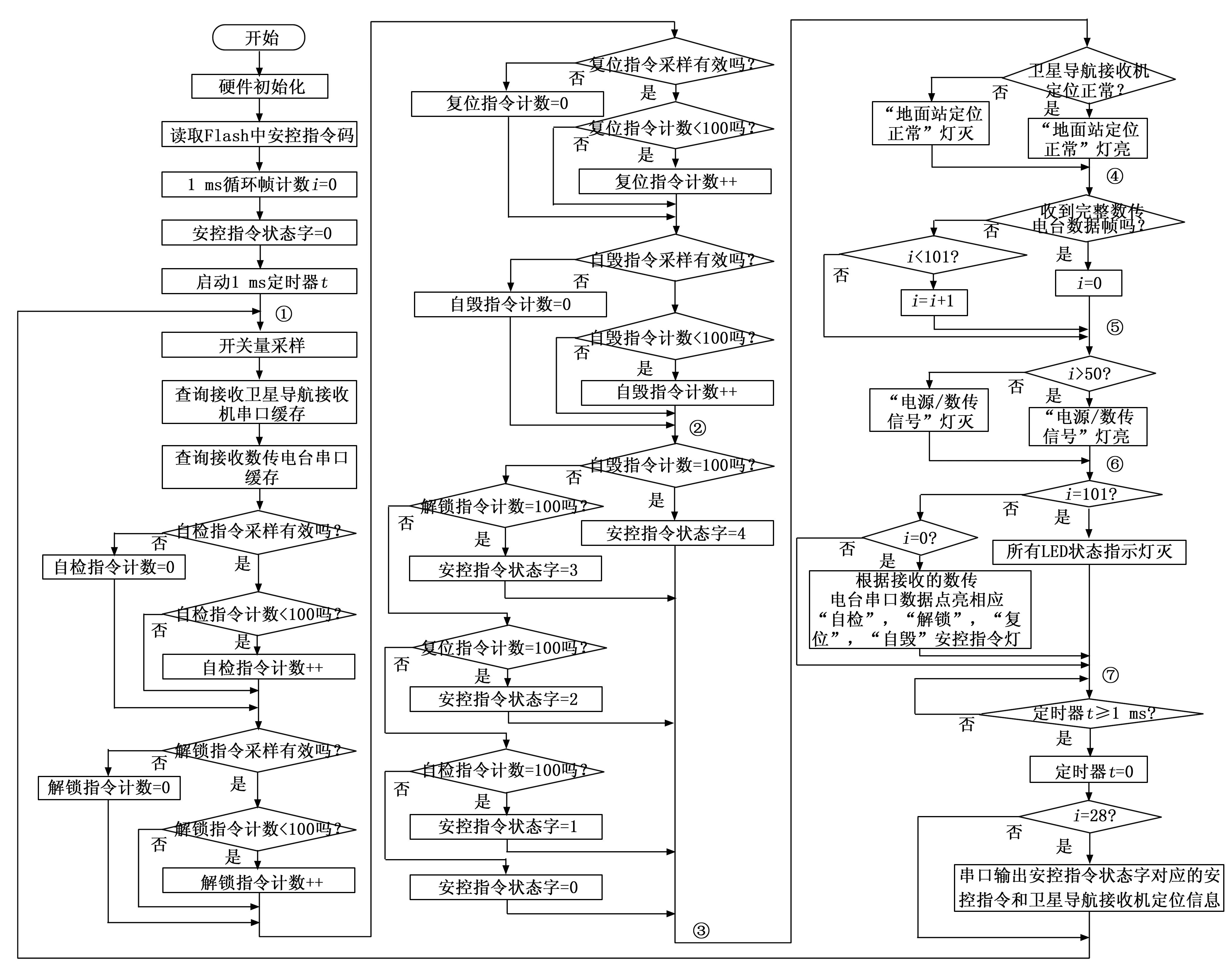
圖7 地面站數(shù)據(jù)綜合器軟件流程圖
4 試驗結(jié)果分析
4.1 試驗設(shè)計
為驗證靶彈微波源輔助控制系統(tǒng)的功能和性能,用靶彈模擬飛行彈道,目標(biāo)艦?zāi)M航跡、微波源模擬回波對靶彈微波源輔助控制系統(tǒng)進(jìn)行半實物仿真測試。靶彈模擬飛行彈道和目標(biāo)艦?zāi)M航跡用衛(wèi)星導(dǎo)航信號模擬器以衛(wèi)星導(dǎo)航信號的形式輸出。衛(wèi)星導(dǎo)航信號模擬器是一種高精度的標(biāo)準(zhǔn)信號源[16-17],它根據(jù)載體動態(tài)特性、電離層和對流層等因素對衛(wèi)星信號的影響,模擬產(chǎn)生衛(wèi)星導(dǎo)航接收機(jī)接收到的各顆衛(wèi)星的高動態(tài)導(dǎo)航信號,為微波源輔助控制系統(tǒng)測試提供高精度仿真環(huán)境,同時還可以作為標(biāo)準(zhǔn),檢驗衛(wèi)星導(dǎo)航接收機(jī)的測量精度[18]。微波源模擬回波用程控微波信號源產(chǎn)生,程控微波信號源通過喇叭天線向微波源發(fā)送微波信號模擬微波源照射目標(biāo)艦產(chǎn)生的回波。
半實物仿真測試中,用基于PXI總線的虛擬儀器構(gòu)建一套測試設(shè)備,測試設(shè)備的模擬量和開關(guān)量信號端口與彈載微波源輔助控制設(shè)備的接口適配電路信號端口相連,同時測試設(shè)備用RS422串口對程控微波信號源輸出的微波信號進(jìn)行控制。測試設(shè)備模擬量和開關(guān)量信號端口特性見表1,測試設(shè)備與靶彈微波源輔助控制系統(tǒng)連接關(guān)系圖見圖8。
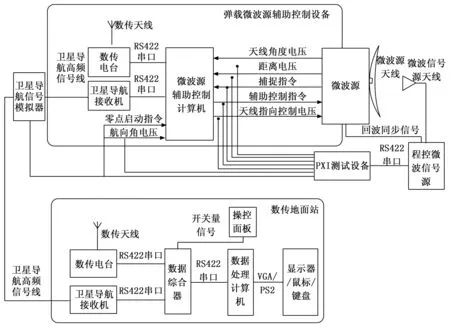
圖8 測試設(shè)備與靶彈微波源輔助控制系統(tǒng)連接關(guān)系
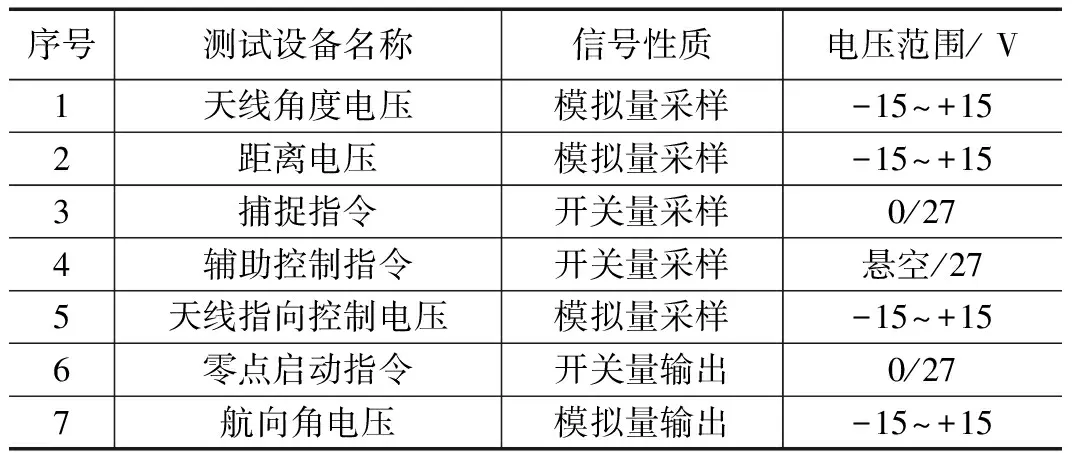
表1 測試設(shè)備模擬量、開關(guān)量信號端口特性
半實物仿真過程如下:首先用靶彈模擬彈道和目標(biāo)艦?zāi)M航跡計算出微波源天線的理論角度;而后啟動測試設(shè)備和靶彈微波源輔助控制系統(tǒng),測試設(shè)備“零點啟動指令”輸出+27 V讓彈載微波源輔助控制設(shè)備進(jìn)入飛控循環(huán)程序,同時衛(wèi)星導(dǎo)航信號模擬器輸出靶彈彈道和目標(biāo)艦航跡的模擬衛(wèi)星導(dǎo)航信號;在靶彈模擬飛行過程中,測試設(shè)備控制程控微波信號源輸出模擬回波信號,同時對天線角度電壓、距離電壓、捕捉指令、輔助控制指令、天線指向控制電壓進(jìn)行采樣監(jiān)測;最后將微波源天線角度電壓采樣結(jié)果與理論角度與進(jìn)行比較。
4.2 結(jié)果分析
半實物仿真條件為:微波信號源天線置于微波源天線電軸0°位置,回波信號延遲的等效距離與靶彈模擬彈道和目標(biāo)艦?zāi)M航跡實時計算出的距離保持一致,微波源開機(jī)時間為25 s。圖9是天線角度電壓采樣結(jié)果與天線理論角度的比較示意圖。靶彈飛行25 s時,微波源開機(jī)并成功捕捉回波,此時微波源天線角度為0°,與天線理論角度不一致,微波源輔助控制起控。微波源輔助控制起控后,微波源輔助控制計算機(jī)輸出天線指向控制電壓,控制天線向理論角度偏轉(zhuǎn),微波源輔助控制功能正常,系統(tǒng)軟件和硬件實現(xiàn)了設(shè)計功能要求。從圖9中可見,天線角度電壓采樣結(jié)果與理論角度之間誤差最大值為0.5°,該誤差為系統(tǒng)整體誤差,包括定位誤差、控制誤差、采樣誤差等,該誤差滿足對天線指向精確控制的要求。
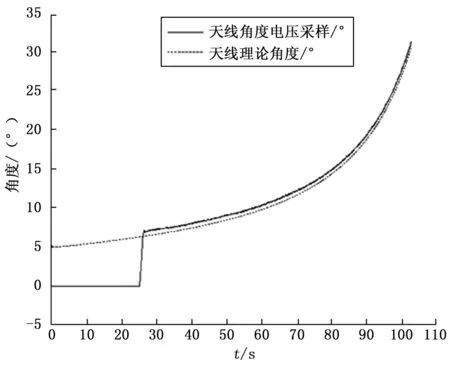
圖9 天線控制精度仿真結(jié)果
5 結(jié)束語
本文以數(shù)傳電臺為基礎(chǔ),依托衛(wèi)星導(dǎo)航接收機(jī)的定位功能,對靶彈微波源輻射輔助控制系統(tǒng)的總體功能與結(jié)構(gòu)、軟件和硬件進(jìn)行了詳細(xì)設(shè)計。該系統(tǒng)在兼顧對靶彈飛行狀態(tài)進(jìn)行監(jiān)測和發(fā)送安控指令的同時,可以實現(xiàn)對靶彈微波源天線指向進(jìn)行輔助控制,當(dāng)微波源天線捕捉目標(biāo)艦不穩(wěn)定時,利用靶彈和目標(biāo)艦在發(fā)射坐標(biāo)系下的位置信息來計算天線理論角度并去控制天線指向。該系統(tǒng)解決了退役導(dǎo)彈雷達(dá)改裝為微波源后工作可靠性低、控制精度差等問題。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
測控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(xué)(2016年10期)2016-11-23 05:11:56
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
西安航空學(xué)院學(xué)報(2014年5期)2014-07-13 01:27:52
