變轉(zhuǎn)速工況下高速列車軸承轉(zhuǎn)子系統(tǒng)特性分析1)
2022-08-26 03:39:26王寶森劉永強(qiáng)
力學(xué)學(xué)報(bào) 2022年7期
王寶森 劉永強(qiáng) 張 斌
* (石家莊鐵道大學(xué)省部共建交通工程結(jié)構(gòu)力學(xué)行為與系統(tǒng)安全國(guó)家重點(diǎn)實(shí)驗(yàn)室,石家莊 050043)
? (石家莊鐵道大學(xué)交通運(yùn)輸學(xué)院,石家莊 050043)
** (南卡羅來納大學(xué)工程與計(jì)算機(jī)學(xué)院,美國(guó)哥倫比亞 29208)
引言
隨著高速鐵路的發(fā)展,高速列車的安全、可靠運(yùn)行越來越受到重視,而軸承作為列車走行部的關(guān)鍵部件,其好壞和運(yùn)動(dòng)狀態(tài)決定了列車的運(yùn)行質(zhì)量.國(guó)內(nèi)外的專家學(xué)者提出了多種不同的方法來檢測(cè)列車軸承中是否存在故障,評(píng)價(jià)軸承的運(yùn)動(dòng)狀態(tài),其中包括:軸溫檢測(cè)法[1]、聲發(fā)射缺陷檢測(cè)方法[2]和用于故障檢測(cè)、識(shí)別和定位的振動(dòng)信號(hào)的信號(hào)處理方法[3]等等.然而以上這些方法易受外界干擾,故障檢測(cè)的準(zhǔn)確性也會(huì)受到顯著影響.
眾所周知,存在故障的軸承的振動(dòng)信號(hào)會(huì)顯示出周期性的峰值[4],這些峰值的頻率和幅度與軸承故障的嚴(yán)重程度和位置有關(guān).基于此,快速傅里葉變換FFT 被用于研究快速診斷軸承故障的頻譜分析技術(shù)[5],并開發(fā)了相應(yīng)的實(shí)驗(yàn)室模塊[6].然而,故障信號(hào)常常被其他信號(hào)調(diào)制和湮沒,極大地影響了這些基于FFT 的方法的準(zhǔn)確性.為了提高故障信號(hào)提取效率和信號(hào)特征分析的準(zhǔn)確性,引入了經(jīng)驗(yàn)?zāi)B(tài)分解[7]、集成經(jīng)驗(yàn)?zāi)B(tài)分解[8]和小波變換[9]等時(shí)頻域分析技術(shù),以進(jìn)行信號(hào)的預(yù)處理和特征提取.例如,基于帶寬經(jīng)驗(yàn)?zāi)J椒纸夂妥赃m應(yīng)多尺度形態(tài)分析的故障診斷方法就被應(yīng)用于軸承的早期故障診斷,并得到了良好的效果[7].隨著神經(jīng)網(wǎng)絡(luò)技術(shù)的發(fā)展,基于深度學(xué)習(xí)的軸承故障診斷技術(shù)也蓬勃發(fā)展,多種網(wǎng)絡(luò)模型被應(yīng)用到了故障診斷和信號(hào)處理過程中,其中包括卷積神經(jīng)網(wǎng)絡(luò)模型[10]、基于自動(dòng)編碼器的深度神經(jīng)網(wǎng)絡(luò)模型[11]和深度信念網(wǎng)絡(luò)[12].但是這些方法通常應(yīng)用于常見旋轉(zhuǎn)機(jī)械的軸承故障診斷和系統(tǒng)運(yùn)動(dòng)狀態(tài)研究.與常用軸承不同,高速列車軸承常常工作在高速、重載的環(huán)境中,且極易受到軸承轉(zhuǎn)子系統(tǒng)內(nèi)部零件間碰撞產(chǎn)生的沖擊信號(hào)的調(diào)制.傳統(tǒng)的信號(hào)處理方法難以從這類信號(hào)中提取特征,并對(duì)軸承系統(tǒng)的運(yùn)動(dòng)狀態(tài)做出準(zhǔn)確判斷.為了解決這個(gè)問題,一種基于模型仿真的方法被提出來并獲得不斷改進(jìn)和完善,其基本思想為:利用牛頓第二定律建立一組微分方程組來模擬軸承-轉(zhuǎn)子系統(tǒng),通過對(duì)方程組進(jìn)行數(shù)值求解得到系統(tǒng)響應(yīng),從機(jī)理角度研究系統(tǒng)的運(yùn)動(dòng)狀態(tài)和故障對(duì)系統(tǒng)運(yùn)動(dòng)狀態(tài)的影響.
文獻(xiàn)[13]建立了一個(gè)具有單點(diǎn)內(nèi)圈故障的軸承模型,模型由一系列沖擊和沖擊衰減函數(shù)組成,來描述軸承運(yùn)行過程中滾子通過故障位置時(shí)所產(chǎn)生的撞擊現(xiàn)象.最后通過振動(dòng)信號(hào)頻譜的解調(diào)譜驗(yàn)證了模型的有效性.Rafsanjani 等[14]建立了內(nèi)圈、外圈和滾動(dòng)體表面存在缺陷的滾動(dòng)軸承非線性動(dòng)力學(xué)模型,并利用經(jīng)典的Floquet 定理對(duì)模型進(jìn)行了穩(wěn)定性分析.陳果[15]建立了航空發(fā)動(dòng)機(jī)轉(zhuǎn)子-滾動(dòng)軸承-機(jī)匣耦合動(dòng)力學(xué)模型,并分析了彈性支承剛度、擠壓油膜阻尼器等系統(tǒng)參數(shù)對(duì)系統(tǒng)運(yùn)動(dòng)狀態(tài)的影響.曹青松等[16]針對(duì)高速列車滾動(dòng)軸承內(nèi)圈與軸徑配合面出現(xiàn)松動(dòng)故障的問題,提出了車體-車架-懸掛-輪軌垂直耦合動(dòng)力學(xué)模型.文獻(xiàn)[17]建立了一個(gè)包含牽引驅(qū)動(dòng)系統(tǒng)和軸箱軸承的綜合的三維車輛-軌道耦合動(dòng)力學(xué)模型,模型考慮了軸箱軸承與其他部件(如輪對(duì)和轉(zhuǎn)向架構(gòu)架)之間的動(dòng)態(tài)相互作用.劉永強(qiáng)等[18]建立了12 自由度含有外圈故障的高速列車軸箱軸承非線性動(dòng)力學(xué)模型,并從非線性動(dòng)力學(xué)角度研究了軸承轉(zhuǎn)速和故障尺寸對(duì)系統(tǒng)運(yùn)動(dòng)狀態(tài)的影響.然而,在實(shí)際列車運(yùn)行過程中,軸承的旋轉(zhuǎn)速度是不斷發(fā)生變化的.上述已有模型的不足之處是它們無法確定變轉(zhuǎn)速工況下軸承滾子的空間位置,因此不能真正模擬高速列車軸承的實(shí)際運(yùn)動(dòng)狀態(tài).Mishra 等[19-20]建立了滾動(dòng)軸承的鍵合圖模型,用于在不穩(wěn)定工況下產(chǎn)生振動(dòng)信號(hào),但是該模型主要是用于故障診斷研究,并不能研究系統(tǒng)參數(shù)和系統(tǒng)穩(wěn)定性之間的關(guān)系.此外,大多數(shù)現(xiàn)有的模型均是基于非線性動(dòng)力學(xué)來對(duì)系統(tǒng)進(jìn)行狀態(tài)分析,結(jié)果偏向于理論,難以與實(shí)際工程應(yīng)用相結(jié)合.更為重要的是,選擇合適的參量對(duì)高速列車軸承進(jìn)行可靠性評(píng)估是目前亟待解決的問題[21],然而能夠描述高速列車軸承在變轉(zhuǎn)速工況下運(yùn)動(dòng)狀態(tài)的指標(biāo)還很少.針對(duì)這些問題,本工作提出了角度迭代法,用來確定滾動(dòng)體在任意時(shí)刻的空間角度,建立了可以在勻速工況和變轉(zhuǎn)速工況下運(yùn)行的高速列車軸承轉(zhuǎn)子系統(tǒng)動(dòng)力學(xué)模型,以二維不變矩為特征指標(biāo)對(duì)變轉(zhuǎn)速工況下軸承-轉(zhuǎn)子系統(tǒng)穩(wěn)定性作了定量分析,并進(jìn)一步研究了在不同轉(zhuǎn)速條件下,轉(zhuǎn)子系統(tǒng)穩(wěn)定性臨界狀態(tài)對(duì)應(yīng)的軸承最大故障,以期對(duì)高速列車軸承安全運(yùn)行提供實(shí)際指導(dǎo).
1 軸承模型
1.1 軸承轉(zhuǎn)子系統(tǒng)耦合模型建立
1.1.1 轉(zhuǎn)子(車軸)系統(tǒng)模型
該模型為一個(gè)輪對(duì)包含有一根車軸和兩組軸承-轉(zhuǎn)子系統(tǒng)(因?yàn)槠渥笥覍?duì)稱,所以這里只討論其中一組),車軸向外延伸并由軸箱支撐,相當(dāng)于固定在地面上,簡(jiǎn)化的軸承轉(zhuǎn)子系統(tǒng)模型如圖1 所示.模型保留了輪對(duì)各組成部分間的位置和作用力關(guān)系,可以模擬軸承-轉(zhuǎn)子系統(tǒng)的運(yùn)動(dòng)和作用力規(guī)律.本文中接觸角α=10°,半錐角β=1.7°.由振動(dòng)力學(xué)[22]知識(shí)可知,車軸質(zhì)量可以等效至車軸中心處,在本文稱其為轉(zhuǎn)子.
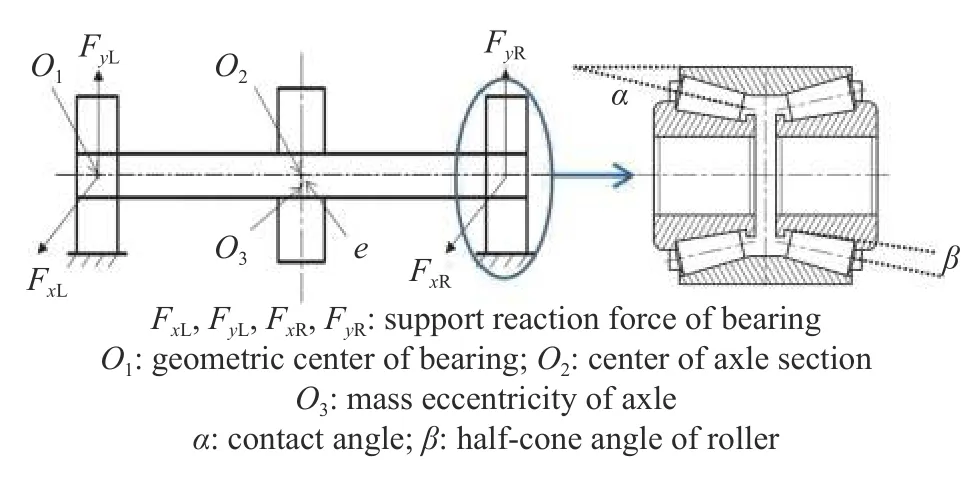
圖1 軸承轉(zhuǎn)子系統(tǒng)模型Fig.1 Model of bearings and rotor coupling system
在轉(zhuǎn)子系統(tǒng)模型中,軸承的支座反力是關(guān)鍵力元,它受滾動(dòng)體和內(nèi)、外圈滾道之間的接觸力影響.軸承在運(yùn)行過程中,滾動(dòng)體的位置不斷變化,同時(shí)也會(huì)引起各滾動(dòng)體與內(nèi)外圈滾道間接觸力方向和大小的變化.由于軸承運(yùn)動(dòng)時(shí)軸承內(nèi)、外圈上的力是通過滾動(dòng)體傳遞的,所以支座反力是所有滾動(dòng)體處接觸力的合力.在實(shí)際應(yīng)用中,軸承的運(yùn)動(dòng)狀態(tài)和受力是非常復(fù)雜的,為了簡(jiǎn)化計(jì)算,同時(shí)不降低模型的準(zhǔn)確性,引入以下假設(shè):
(1)外圈固定在剛體上,且轉(zhuǎn)速為0,但是在橫向和垂向上考慮有位移變化;
(2)滾動(dòng)體在滾道上的運(yùn)動(dòng)形式是純滾動(dòng),不考慮打滑現(xiàn)象;
(3)滾動(dòng)體和滾道之間的接觸力滿足胡克定律.
為了求解軸承的支座反力,首先要確定每一個(gè)滾動(dòng)體的空間角度.雙列圓錐滾子軸承的側(cè)視圖如圖2 所示,N0個(gè)滾子均勻分布在內(nèi)外滾道間,角度間隔為2π/N0,在軸承旋轉(zhuǎn)過程中,第i(i=1,2,···,N0)個(gè)滾子在時(shí)間t時(shí)刻的位置角為

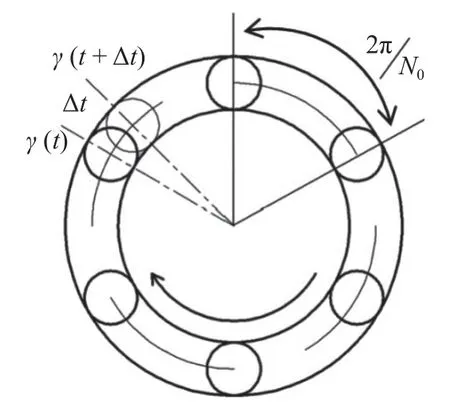
圖2 軸承側(cè)視圖Fig.2 Side view of the bearing
其中γ(t)是編號(hào)為1 的滾動(dòng)體在時(shí)間t內(nèi)轉(zhuǎn)過的角度,初始角度γ(t0)=0.在第i個(gè)滾子處的接觸形變量為

其中,c0是軸承徑向間隙;xr1,xr2分別是右側(cè)軸承內(nèi)圈和外圈的橫向位移;yr1,yr2分別是右側(cè)軸承內(nèi)圈和外圈的垂向位移.根據(jù)非線性赫茲接觸理論可知,滾動(dòng)體與滾道之間的接觸力為[23]

其中,Kt為接觸剛度;在圓錐滾子軸承中,n=10/9;當(dāng)δi>0,Hi=1;當(dāng)δi≤0,Hi=0,此時(shí)滾動(dòng)體與滾道不接觸.將每個(gè)滾動(dòng)體處求得的接觸力分解到橫向和垂向兩個(gè)方向上,再按方向求和便得到了兩個(gè)方向上的接觸力合力[24],即
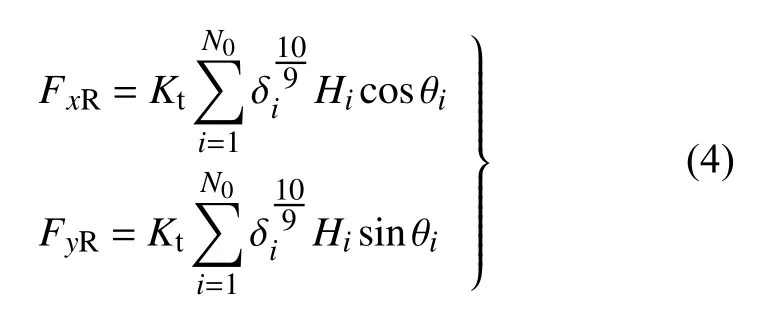
其中,FxR,FyR分別為右側(cè)軸承橫向和垂向兩個(gè)方向上的接觸力合力.類似地,左側(cè)軸承兩個(gè)方向上的接觸力合力FxL,FyL也可用同樣的方式求得.
1.1.2 軸承系統(tǒng)模型
將軸承系統(tǒng)模型視為一系列彈簧-質(zhì)量模型的耦合模型,則每一部分的位移和速度都可用牛頓第二定律來表示.軸承動(dòng)力學(xué)模型的示意圖如圖3 所示.軸承在運(yùn)行過程中,變剛度振動(dòng)和輪軌激勵(lì)會(huì)導(dǎo)致軸承內(nèi)外圈、傳感器和其他元件產(chǎn)生固有振動(dòng),通過調(diào)整單元諧振器的剛度和阻尼系數(shù)來模擬這些高頻振動(dòng)可以使模型更加準(zhǔn)確[25-26].
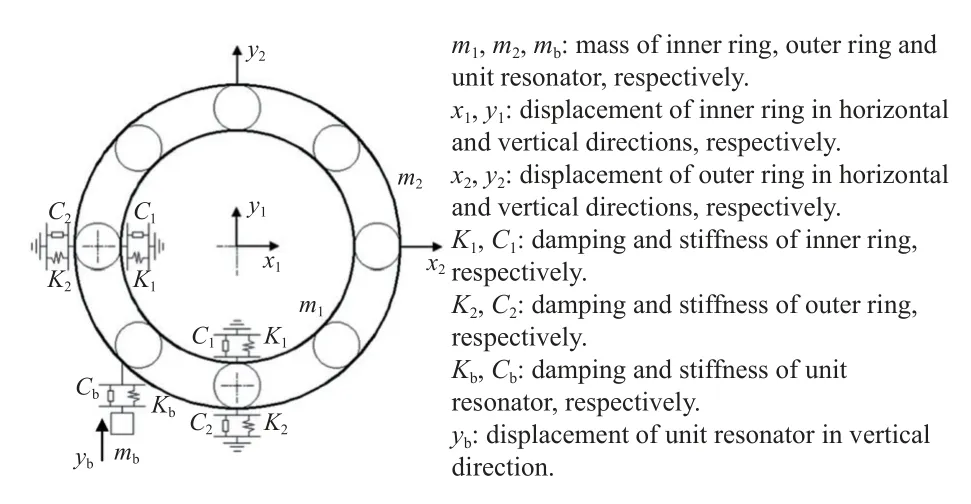
圖3 軸承動(dòng)力學(xué)模型Fig.3 Bearing dynamics model
根據(jù)牛頓第二定律,軸承轉(zhuǎn)子系統(tǒng)的動(dòng)力學(xué)方程組如式(5)所示
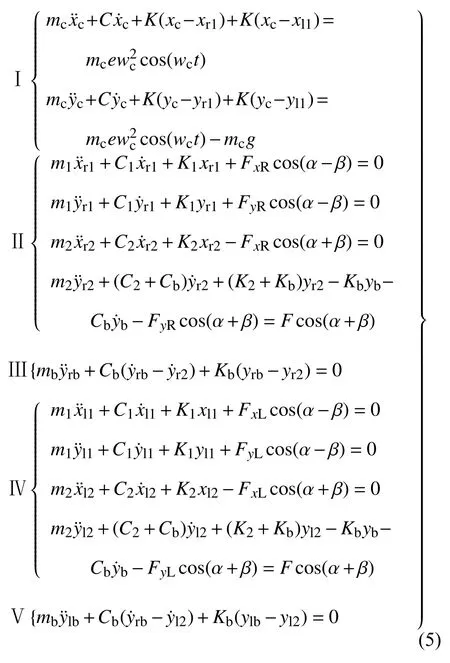
其中,K,C分別為列車車軸的剛度和阻尼;xc,yc分別為車軸中間截面質(zhì)心的橫向和垂向位移;xl1,xl2,yl1,yl2分別是左側(cè)軸承內(nèi)圈和外圈的橫向和垂向位移;yrb,ylb分別為位于右側(cè)和左側(cè)軸承的單元諧振器的垂向位移;F是單個(gè)軸承所承載的軸重.在式(5)中,式 Ⅰ 是車軸橫向和垂向振動(dòng)方程;式 Ⅱ 和式 Ⅳ分別為右側(cè)和左側(cè)軸承的橫向和垂向振動(dòng)方程;式Ⅲ 和式 Ⅴ 分別為右側(cè)和左側(cè)單元諧振器振動(dòng)方程.
1.2 角度迭代法
式(1)中,滾動(dòng)體轉(zhuǎn)過的角度γ(t)是決定模型是否可以模擬變轉(zhuǎn)速工況下軸承運(yùn)動(dòng)狀態(tài)的關(guān)鍵參數(shù).高速列車在運(yùn)行過程中,特別是在加速和制動(dòng)時(shí),其車軸的旋轉(zhuǎn)角速度w0(t)會(huì)不斷發(fā)生變化,所以γ(t)與時(shí)間t也非確定的函數(shù)關(guān)系,為了解決這個(gè)問題,確定滾動(dòng)體在任意時(shí)刻的空間角度位置,借鑒文獻(xiàn)[19-20]中通過式(6)中的積分求解角度的方法,提出了一種角度迭代的方法,來確定在任意時(shí)刻滾動(dòng)體的空間角度位置,即

角度迭代法假設(shè)w0(t)在極短的時(shí)間段Δt(Δt→0)內(nèi)是定值,所以滾動(dòng)體在t+Δt時(shí)間段內(nèi)轉(zhuǎn)過的角度可以表示為γ(t+Δt)=γ(t)+w(t)Δt,如圖2所示.其中,當(dāng)軸承存在外圈和內(nèi)圈故障時(shí),w(t)是滾動(dòng)體和故障區(qū)域在時(shí)刻t時(shí)的相對(duì)轉(zhuǎn)速.當(dāng)滾動(dòng)體出現(xiàn)故障時(shí),w(t)表示滾動(dòng)體在時(shí)刻t的自轉(zhuǎn)轉(zhuǎn)速.在MATLAB 仿真過程中,Δt代表了ode45 函數(shù)在每一次迭代時(shí)的步長(zhǎng).基于此,滾動(dòng)體的空間角度問題轉(zhuǎn)化為不同故障條件下w(t)的求解問題.根據(jù)軸承內(nèi)幾何關(guān)系可知
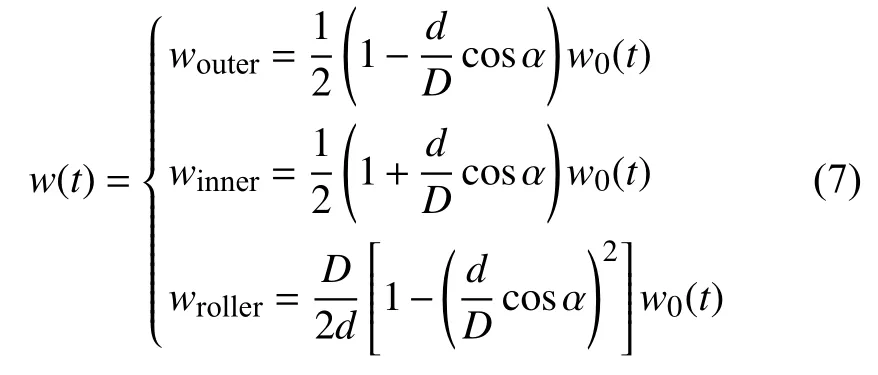
其中,d表示滾動(dòng)體的直徑,D表示軸承節(jié)徑.
2 軸承模型的驗(yàn)證
2.1 系統(tǒng)參數(shù)
本文選取了某型號(hào)高速動(dòng)車組的轉(zhuǎn)向架軸箱軸承作為實(shí)驗(yàn)對(duì)象,其幾何參數(shù)如表1 所示,軸承系統(tǒng)參數(shù)如表2 所示[27],單元諧振器參數(shù)如表3 所示.

表1 軸承幾何參數(shù)Table 1 Geometric parameters of the bearing
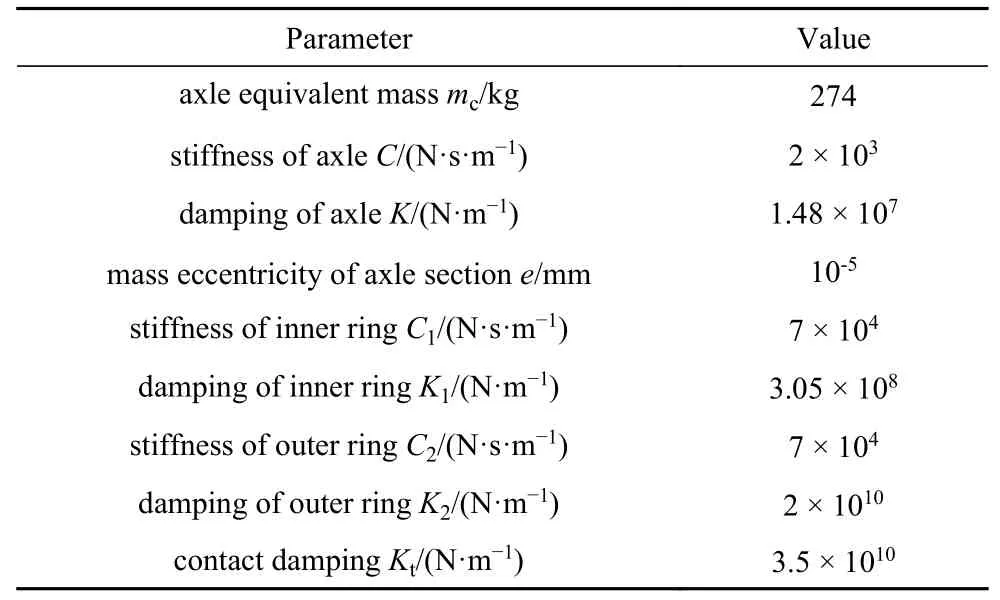
表2 軸承系統(tǒng)模型參數(shù)Table 2 Parameter of the bearing system model

表3 單元諧振器參數(shù)Table 3 The parameter of the unit resonator
2.2 模型的仿真和驗(yàn)證
為了驗(yàn)證模型的有效性,在仿真模型中分別添加了內(nèi)圈和外圈故障,并得到了模型在定轉(zhuǎn)速和變轉(zhuǎn)速工況下的振動(dòng)響應(yīng).為了進(jìn)行對(duì)比,對(duì)外圈故障和內(nèi)圈故障軸承在相同工況下進(jìn)行對(duì)比實(shí)驗(yàn).由于兩種故障類型下得到的結(jié)果相似,為了節(jié)省篇幅,這里只討論了軸承存在外圈故障的情況.
在軸承的內(nèi)圈和外圈滾到位置分別加工了通槽故障,外圈故障寬度Lo=1 mm,內(nèi)圈故障寬度Lr=0.1 mm.軸承外圈、外圈故障和內(nèi)圈故障示意圖如圖4 所示.在軸承實(shí)驗(yàn)中,采樣時(shí)間為10 s,采樣頻率為51 200 Hz.

圖4 軸承外圈、外圈故障和內(nèi)圈故障示意圖Fig.4 The schematic diagram of the outer ring,the outer ring fault and the inner ring fault
加速度傳感器安裝在軸承軸箱外側(cè).實(shí)驗(yàn)平臺(tái)和傳感器位置如圖5 所示.
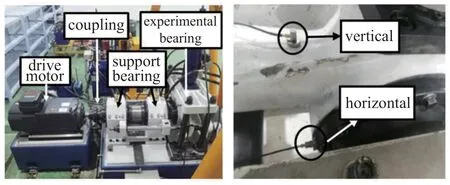
圖5 實(shí)驗(yàn)臺(tái)和傳感器安裝位置示意圖Fig.5 The schematic diagram of the test rig and sensors’ location
2.2.1 勻轉(zhuǎn)速工況
主軸轉(zhuǎn)速(即軸承內(nèi)圈轉(zhuǎn)速)w0=1600 r/min,軸承外圈故障特征頻率為[28]

在該實(shí)驗(yàn)條件下,fouter=188.87 Hz.
(1)仿真
軸承外圈仿真振動(dòng)加速度時(shí)域波形和對(duì)應(yīng)的頻譜圖如圖6 所示.
從圖6(a)的時(shí)域波形中可以看到明顯的周期性沖擊,這意味著軸承存在有單點(diǎn)故障.而圖6(b)的頻域曲線中則可發(fā)現(xiàn)在外圈故障特征頻率及其倍頻附近都存在峰值,發(fā)現(xiàn)的故障特征頻率仿真值與理論計(jì)算結(jié)果的誤差為0.07%,證明了該模型在表達(dá)軸承故障特征方面是有效的.

圖6 勻速工況下的仿真結(jié)果Fig.6 Simulation results under constant speed condition
(2)軸承實(shí)驗(yàn)
根據(jù)軸承實(shí)驗(yàn)結(jié)果,軸承外圈振動(dòng)加速度時(shí)域波形和對(duì)應(yīng)的頻譜圖如圖7 所示.受實(shí)驗(yàn)過程中背景噪聲的影響,在時(shí)域波形中雖然無法看到明顯周期性沖擊信號(hào),但是經(jīng)過包絡(luò)譜分析后,在圖7(b)中可以找到外圈故障特征頻率的基頻、2 倍頻和4 倍頻,其中基頻實(shí)驗(yàn)結(jié)果和理論值的誤差為3.7%,證明實(shí)驗(yàn)是有效的,也再次證明該模型的有效性.
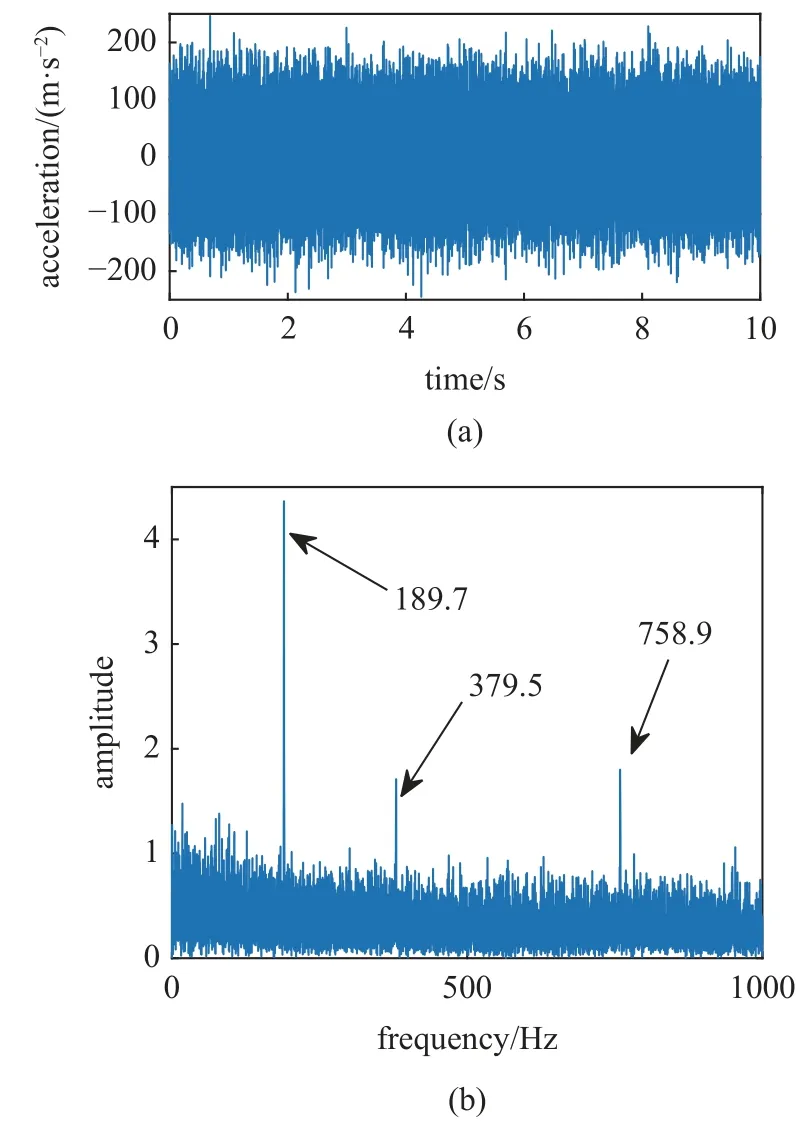
圖7 勻速工況下的實(shí)驗(yàn)結(jié)果Fig.7 Experimental results under constant speed condition
2.2.2 變轉(zhuǎn)速工況
根據(jù)理論計(jì)算結(jié)果,外圈故障特征階比為[8,29-30]

根據(jù)軸承的幾何參數(shù)可計(jì)算得到fo=7.082.本文使用文獻(xiàn)[31] 所述的轉(zhuǎn)速提取方法從實(shí)驗(yàn)信號(hào)中提取到了相應(yīng)的瞬時(shí)轉(zhuǎn)速曲線,為了使仿真更接近實(shí)際,利用小波降噪提取了實(shí)驗(yàn)信號(hào)中的噪聲信號(hào),并添加到了仿真得到的振動(dòng)信號(hào)中.在實(shí)驗(yàn)過程中,先將實(shí)驗(yàn)臺(tái)主軸加速到某一轉(zhuǎn)速并保持一段時(shí)間,然后逐漸減速到0,信號(hào)采樣時(shí)間為60 s,采樣頻率為51 200 Hz.
(1)實(shí)驗(yàn)
變轉(zhuǎn)速工況下的實(shí)驗(yàn)結(jié)果如圖8 所示.從圖8(a)中可以看出,軸承外圈振動(dòng)加速度的幅值與主軸轉(zhuǎn)速呈正相關(guān).圖8(b)中的階比譜峰值也和理論計(jì)算結(jié)果吻合,其中基頻的誤差為5.95%.
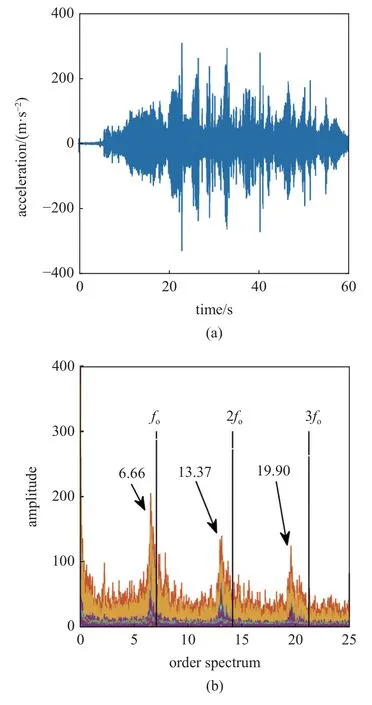
圖8 變轉(zhuǎn)速工況下的實(shí)驗(yàn)結(jié)果Fig.8 Experimental results under variable speed condition
(2)仿真
變轉(zhuǎn)速工況下的仿真結(jié)果如圖9 所示,其中從實(shí)驗(yàn)信號(hào)中提取得到的瞬時(shí)轉(zhuǎn)速曲線作為輸入信號(hào)應(yīng)用到仿真中,以保證仿真實(shí)驗(yàn)和實(shí)際實(shí)驗(yàn)在轉(zhuǎn)速上的一致性.從圖9(a)中可以看出,其外圈振動(dòng)加速度的幅值和轉(zhuǎn)速呈正相關(guān).但因?yàn)楹?jiǎn)化后的模型在結(jié)構(gòu)上比真實(shí)的軸承簡(jiǎn)單,參數(shù)取值也存在著不可避免的誤差,故障引起的沖擊不會(huì)被其他部件的振動(dòng)信號(hào)調(diào)制,故幅值較低.圖9(b)中,在故障特征階比的基頻及其倍頻處均出現(xiàn)峰值,且仿真結(jié)果和理論計(jì)算結(jié)果幾乎相等.仿真結(jié)果和實(shí)驗(yàn)結(jié)果都證明了該模型在變轉(zhuǎn)速工況下的有效性.
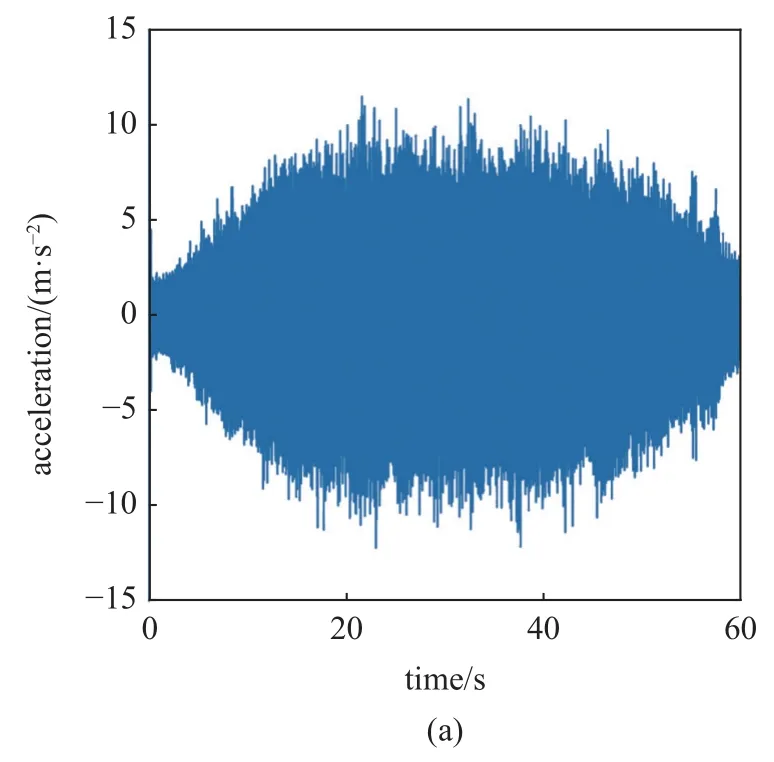
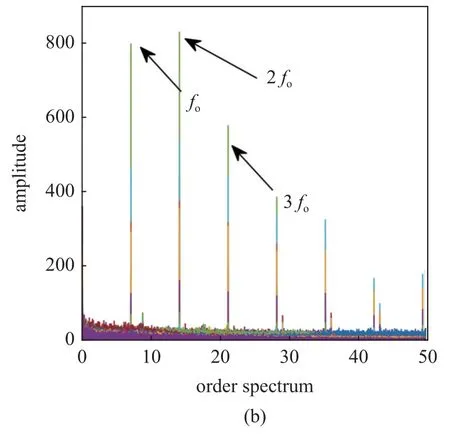
圖9 變轉(zhuǎn)速工況下的仿真結(jié)果Fig.9 Simulation results under variable speed condition
3 基于軸心軌跡的系統(tǒng)穩(wěn)定性分析
系統(tǒng)穩(wěn)定性是指軸承轉(zhuǎn)子系統(tǒng)保持穩(wěn)定運(yùn)行狀態(tài)的能力.在本文中,由軸心軌跡的偏差來表示,偏差越大,系統(tǒng)越不穩(wěn)定.具有良好穩(wěn)定性的軸承系統(tǒng)的軸心軌跡會(huì)表現(xiàn)得較為集中,軌跡收斂;相反,軸心軌跡會(huì)較為發(fā)散.將軸承系統(tǒng)振動(dòng)響應(yīng)的橫向位移和垂向位移分別作為橫向和縱向坐標(biāo)畫在同一個(gè)圖中即可得到軸心軌跡.對(duì)于仿真模型,系統(tǒng)位移可直接得到.在實(shí)際軸承實(shí)驗(yàn)中采集到的信號(hào)均為振動(dòng)加速度信號(hào),將加速度信號(hào)經(jīng)過濾波、降噪、去除異常值、去趨勢(shì)項(xiàng)和兩次積分等處理后便得到了相應(yīng)的位移信號(hào),就可以繪出外圈軸心軌跡.為了研究外圈故障、內(nèi)圈故障和滾動(dòng)體故障對(duì)系統(tǒng)穩(wěn)定性的影響,分別進(jìn)行了相應(yīng)的仿真模擬,其中軸承內(nèi)圈角加速度wac=320 r/min2,故障尺寸L0=1 mm,仿真時(shí)間為2 s.對(duì)于三種故障類型,轉(zhuǎn)子和右側(cè)軸承內(nèi)圈(下文的軸承處軸心軌跡表示右側(cè)軸承的內(nèi)圈軸心軌跡)軸心軌跡如圖10 和圖11 所示,其中ORF表示外圈故障,IRF 表示內(nèi)圈故障,REF 表示滾動(dòng)體故障,下同.
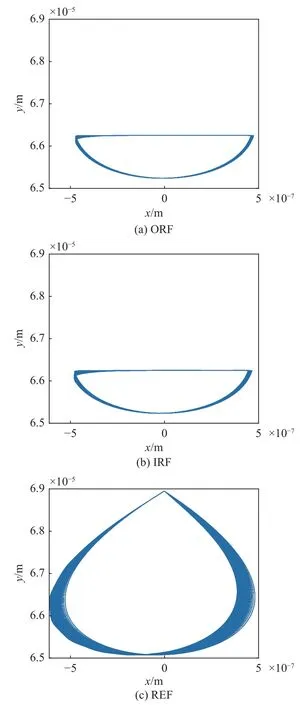
圖11 軸承處軸心軌跡Fig.11 Axis trajectory diagram at the bearing
從圖10 中可以看出,當(dāng)軸承存在外圈故障和內(nèi)圈故障時(shí),軸心軌跡在仿真時(shí)間內(nèi)會(huì)收斂到一個(gè)集中區(qū)域,為了評(píng)價(jià)收斂速度對(duì)于穩(wěn)定性的影響,將軸心軌跡第一次重合的時(shí)刻定義為“收斂節(jié)點(diǎn)”,利用MATLAB 繪制動(dòng)態(tài)圖的功能,在軸心軌跡重合時(shí)刻進(jìn)行標(biāo)記來確定“收斂節(jié)點(diǎn)”對(duì)應(yīng)的時(shí)刻.由此可知,外圈故障的“收斂節(jié)點(diǎn)”為0.53 s,內(nèi)圈故障為0.50 s.“收斂節(jié)點(diǎn)”對(duì)應(yīng)的時(shí)間越短,系統(tǒng)就越穩(wěn)定,所以內(nèi)圈故障對(duì)系統(tǒng)穩(wěn)定性影響較小.當(dāng)軸承存在滾動(dòng)體故障時(shí),其轉(zhuǎn)子處軸心軌跡沒有明顯的收斂規(guī)律,且軌跡半徑變化幅度很大,說明滾動(dòng)體故障對(duì)系統(tǒng)穩(wěn)定性有較大程度的影響,對(duì)軸承的運(yùn)行有較大的安全隱患.
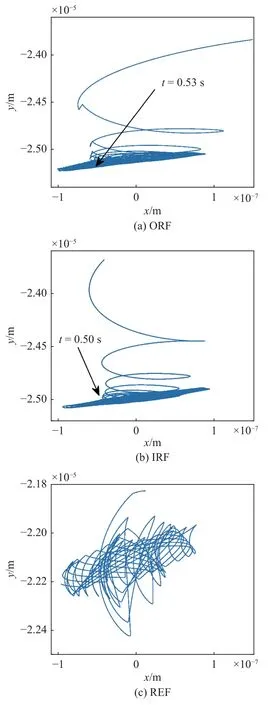
圖10 轉(zhuǎn)子處軸心軌跡Fig.10 Axis trajectory diagram at the rotor
由于軸承系統(tǒng)比轉(zhuǎn)子系統(tǒng)結(jié)構(gòu)更為緊湊,故穩(wěn)定性也較好,其軸心軌跡比較穩(wěn)定,“收斂節(jié)點(diǎn)”的值極小.然而當(dāng)軸承存在滾動(dòng)體故障時(shí),其軸心軌跡的運(yùn)動(dòng)范圍和振動(dòng)位移均比軸承存在其他兩種故障時(shí)要大,使得滾動(dòng)體故障對(duì)系統(tǒng)穩(wěn)定性的影響也較大.總的來說,滾動(dòng)體故障對(duì)列車安全運(yùn)行的影響最大,在實(shí)際對(duì)軸承故障檢測(cè)和維護(hù)時(shí)應(yīng)該給予滾動(dòng)體更多關(guān)注.
4 基于二維不變矩的系統(tǒng)穩(wěn)定性定量分析
雖然軸心軌跡可以在一定程度上評(píng)價(jià)系統(tǒng)的穩(wěn)定性,但是這種影響并不直觀,更多的是定性評(píng)價(jià).為了定量比較軸承滾動(dòng)體故障對(duì)系統(tǒng)運(yùn)動(dòng)穩(wěn)定性的影響,采用二維不變矩作為特征指標(biāo).1962 年,Hu[32]提出了平面幾何圖形的二維不變性理論,并提出了7 個(gè)幾何矩的不變量(前兩個(gè)分別評(píng)價(jià)圖形的集中程度和對(duì)稱度,故本文只應(yīng)用前兩個(gè)).利用二維不變矩進(jìn)行圖像分類和識(shí)別的方法[33]現(xiàn)已成熟地應(yīng)用到了工業(yè)圖像中無損檢測(cè)、人臉特征提取[34]和醫(yī)學(xué)領(lǐng)域的病變細(xì)胞的自動(dòng)識(shí)別等領(lǐng)域.
密度分布函數(shù)ρ(x,y)的(p+q)階矩用黎曼積分定義為

圖像的0 階矩表示圖像的質(zhì)量

圖像的一階矩可以用來確定圖像的質(zhì)心

將圖像的坐標(biāo)原點(diǎn)平移至(xc,yc)處,即得到對(duì)于圖像位移不變的中心矩

對(duì)μpq歸一化處理,保證中心矩對(duì)尺度變化的恒定

依據(jù)此給出Hu[32]提出的前兩個(gè)不變矩,其特征可以對(duì)圖像的位移、尺度和旋轉(zhuǎn)變換保持恒定
由于不變矩在圖形發(fā)生尺度、位移和旋轉(zhuǎn)變化時(shí)都保持恒定,故可以將其應(yīng)用到故障軸承轉(zhuǎn)子系統(tǒng)的軸心軌跡定量評(píng)價(jià)中,以此來判斷軸承轉(zhuǎn)子系統(tǒng)的運(yùn)動(dòng)穩(wěn)定性.φ1可以用來評(píng)價(jià)軸心軌跡的離散程度,φ1越大,表示越發(fā)散,系統(tǒng)穩(wěn)定性就越差.φ2可以用來評(píng)價(jià)軸心軌跡的對(duì)稱性,φ2越大,表示對(duì)稱性越差,系統(tǒng)穩(wěn)定性就越差.
4.1 勻速工況下的系統(tǒng)穩(wěn)定性分析
為了使分析結(jié)果更有說服力,在實(shí)驗(yàn)條件允許的情況下進(jìn)行了定轉(zhuǎn)速工況下的對(duì)比實(shí)驗(yàn).多次重復(fù)2.2.1 中的實(shí)驗(yàn),通常情況下,高速列車在運(yùn)行過程中,軸承內(nèi)圈的轉(zhuǎn)速相對(duì)較高,為了和實(shí)際情況保持一致,設(shè)置仿真和實(shí)驗(yàn)的主軸轉(zhuǎn)速在1200 r/min和2100 r/min 之間.分別進(jìn)行4 組實(shí)驗(yàn),其中實(shí)驗(yàn)臺(tái)主軸轉(zhuǎn)速分別為1200,1500,1800,2100 r/min,外圈故障尺寸為1 mm,內(nèi)圈故障尺寸為0.1 mm.在外圈故障和內(nèi)圈故障條件下的對(duì)比結(jié)果如圖12 和圖13所示.

圖13 內(nèi)圈故障條件下對(duì)比結(jié)果Fig.13 Results comparison under the condition of inner ring fault
從圖12 中可以看出,實(shí)驗(yàn)結(jié)果明顯大于仿真結(jié)果,這是因?yàn)閷?shí)際實(shí)驗(yàn)中的背景噪聲導(dǎo)致軸心軌跡的圖形發(fā)生變形和偏移,使圖形的發(fā)散程度和不對(duì)稱程度變大,進(jìn)而使φ1和φ2的值偏大.總的來說,當(dāng)軸承存在外圈故障時(shí),系統(tǒng)穩(wěn)定性會(huì)隨著轉(zhuǎn)速的升高而變差,所以在列車實(shí)際運(yùn)行過程中,如果軸承產(chǎn)生外圈故障,降低轉(zhuǎn)速是保持系統(tǒng)運(yùn)動(dòng)穩(wěn)定性和避免嚴(yán)重事故的有效手段.
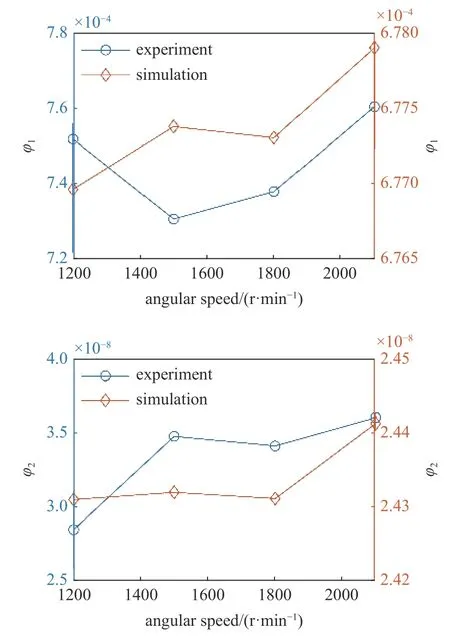
圖12 外圈故障條件下對(duì)比結(jié)果Fig.12 Results comparison under the condition of outer ring fault
與外圈故障不同的是,內(nèi)圈故障在轉(zhuǎn)速為1800 r/min 時(shí)的值均比2100 r/min 時(shí)的值更大,說明內(nèi)圈存在故障時(shí),轉(zhuǎn)速越高系統(tǒng)穩(wěn)定性越好,這是因?yàn)閮?nèi)圈存在故障時(shí),故障所處的方位會(huì)隨著軸承旋轉(zhuǎn)而不斷改變,轉(zhuǎn)速越高,故障產(chǎn)生的振動(dòng)沖擊在圓周方向上分布越密集,使此時(shí)軸心軌跡的發(fā)散程度和不對(duì)稱程度降低,從而使φ1和φ2的值降低.所以在列車運(yùn)行過程中,如果軸承產(chǎn)生內(nèi)圈故障,在不考慮其他因素的前提下,適當(dāng)提高轉(zhuǎn)速會(huì)有助于提高系統(tǒng)穩(wěn)定性.
4.2 變轉(zhuǎn)速工況下的系統(tǒng)穩(wěn)定性分析
高速列車在運(yùn)行過程中速度經(jīng)常會(huì)發(fā)生變化,其軸承轉(zhuǎn)子系統(tǒng)的運(yùn)動(dòng)狀態(tài)也不同于列車勻速行駛的情況,因此有必要對(duì)軸承轉(zhuǎn)子系統(tǒng)的穩(wěn)定性進(jìn)行分析.分別在外圈故障、內(nèi)圈故障和滾動(dòng)體故障條件下進(jìn)行仿真,軸承內(nèi)圈的角加速度從0 變化至500 r/min2,分別求得在軸承處和轉(zhuǎn)子處φ1和φ2的值.軸承處φ1和φ2的值與角加速度的關(guān)系如圖14 所示,轉(zhuǎn)子處φ1和φ2的值與角加速度的關(guān)系如圖15 所示.在接下來的討論中,為了解釋方便,定義φ1,type,location和φ2,type,location為不同故障條件下不同位置軸心軌跡的φ1和φ2的值,其中type={ORF,IRF,REF},location={rotor,bearing}.例如φ1,bearing表示在軸承處軸心軌跡的φ1的值,φ2,IRF,rotor表示在內(nèi)圈故障條件下轉(zhuǎn)子處軸心軌跡的φ2的值.

圖14 軸承處軸心軌跡的φ1 和φ2 的值Fig.14 Values of φ1 and φ2 of axis trajectory at bearing
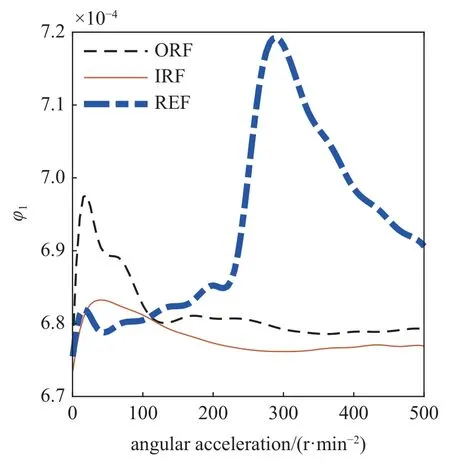
圖15 轉(zhuǎn)子處軸心軌跡的φ1 和φ2 的值Fig.15 Values of φ1 and φ2 of axis trajectory at rotor
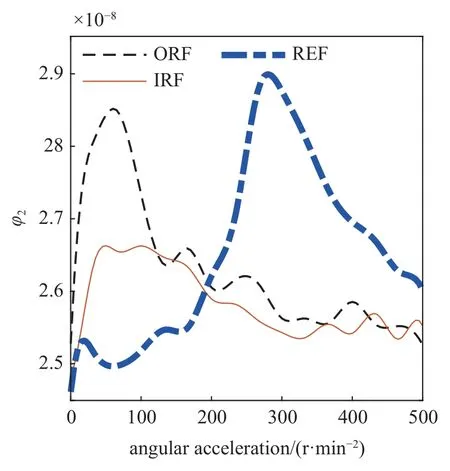
圖15 轉(zhuǎn)子處軸心軌跡的φ1 和φ2 的值(續(xù))Fig.15 Values of φ1 and φ2 of axis trajectory at rotor (continued)
從圖14 中可以看出,φ1,bearing和φ2,bearing都隨著角加速度的變大而變大,這是因?yàn)檐囕S加速度的增加很大程度上影響了三種故障類型時(shí)軸心軌跡的發(fā)散程度和不對(duì)稱程度.由此可知,在加速階段,列車的加速度越大,其軸承系統(tǒng)的穩(wěn)定性就越差.同時(shí),當(dāng)軸承存在滾動(dòng)體故障時(shí),φ1和φ2的值都是最大的,說明滾動(dòng)體故障在加速階段對(duì)軸承系統(tǒng)的穩(wěn)定性影響是最大的.根據(jù)軸承故障模型可知,當(dāng)軸承存在外圈故障時(shí),軸承處軸心軌跡周期性地受到來自同一方向的振動(dòng)沖擊的影響,單向沖擊示意圖如圖16(a)所示,其軌跡的發(fā)散程度和不對(duì)稱程度都有所增加,因而導(dǎo)致其對(duì)應(yīng)的φ1和φ2的值均比內(nèi)圈故障條件下的要大,所以在加速階段,外圈故障對(duì)軸承系統(tǒng)穩(wěn)定性的影響比內(nèi)圈故障更大.
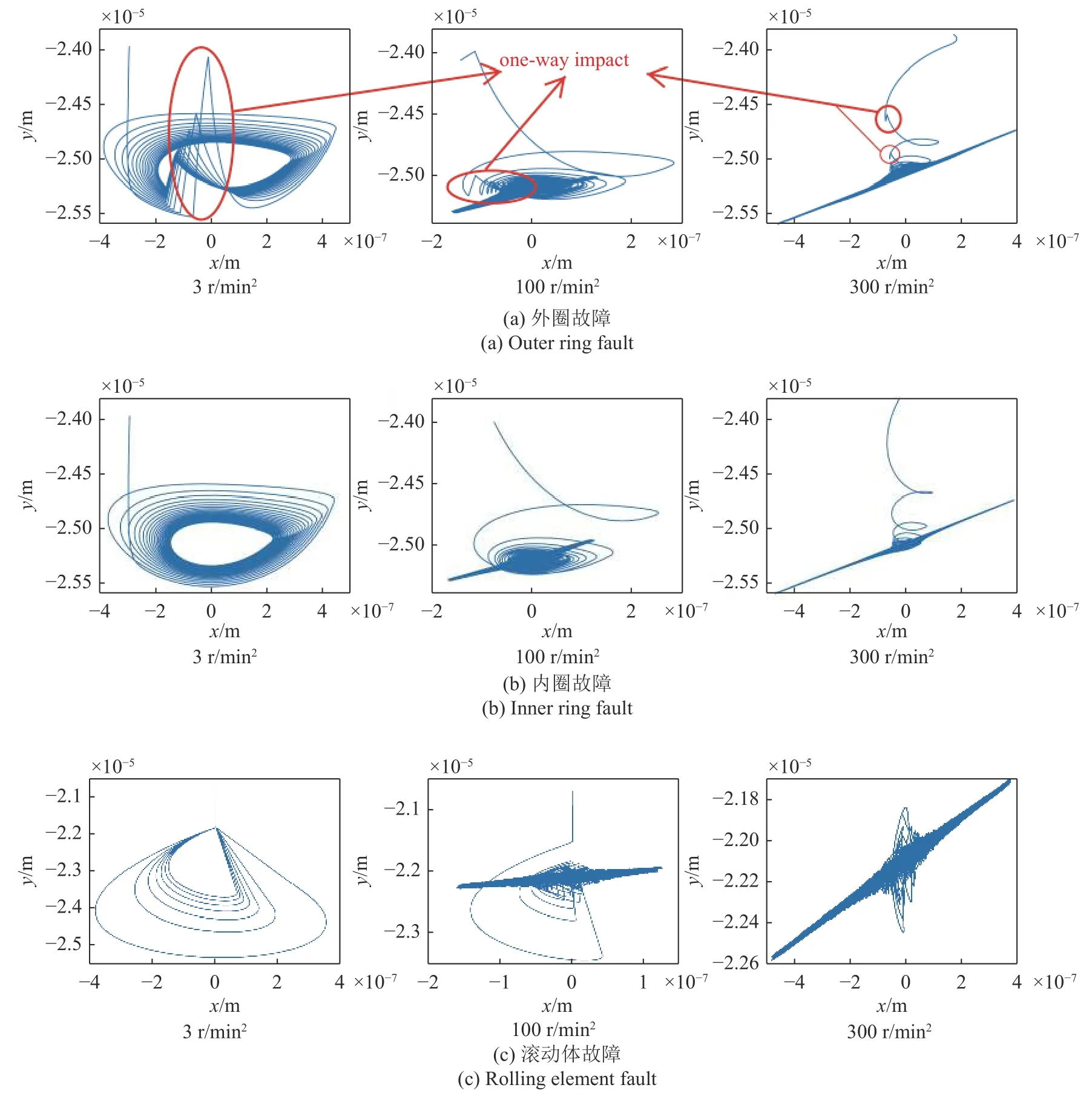
圖16 三種角加速度下轉(zhuǎn)子處軸心軌跡Fig.16 Axis trajectory at rotor under the conditions of three angular accelerations
在轉(zhuǎn)子處,三種故障類型對(duì)系統(tǒng)穩(wěn)定性的影響較為復(fù)雜.外圈故障、內(nèi)圈故障和滾動(dòng)體故障對(duì)應(yīng)的φ1和φ2的值隨角加速度變化的曲線均產(chǎn)生了交點(diǎn).對(duì)于φ1而言,其對(duì)應(yīng)角加速度約為120 r/min2,當(dāng)車軸角加速度小于這個(gè)值時(shí),φ1,ORF,rotor和φ1,IRF,rotor都大于φ1,REF,rotor,當(dāng)車軸角加速度大于這個(gè)值時(shí),φ1,ORF,rotor和φ1,IRF,rotor都小于φ1,REF,rotor.這表明,在低角加速度工況下,外圈故障和內(nèi)圈故障對(duì)系統(tǒng)穩(wěn)定性的影響較大,而在較高角加速度工況下,滾動(dòng)體故障對(duì)系統(tǒng)穩(wěn)定性的影響較大,但是這種影響隨著角加速度的升高,先增大而后逐漸減小.原因是軸承存在滾動(dòng)體故障時(shí),軸心軌跡更加扭曲,所以φ1和φ2的值較高,而隨著角加速度的升高,軸心軌跡逐漸收斂至同一區(qū)域,形狀不再發(fā)生更大變化,表現(xiàn)為φ1和φ2的值逐漸下降且趨于平穩(wěn).對(duì)于φ2而言,其交點(diǎn)對(duì)應(yīng)的角加速度大約為200 r/min2,也可以得到相似的結(jié)論.
為了進(jìn)一步解釋這個(gè)現(xiàn)象,選取了三種角加速度的工況(wac=3,100,300 r/min2),繪制了在不同故障條件下轉(zhuǎn)子處軸心軌跡,如圖16 所示.為了避免因仿真時(shí)間太短導(dǎo)致的誤差,將每一種工況的仿真時(shí)間延長(zhǎng)至10 s.
從圖16 中可以看出,當(dāng)角加速度較小時(shí)(3 r/min2),軸承外圈故障會(huì)使轉(zhuǎn)子受到同一方向周期性的沖擊,即單向沖擊,導(dǎo)致轉(zhuǎn)子處軸心軌跡在同一位置產(chǎn)生一個(gè)尖峰,集中程度和對(duì)稱性都受到了一定程度的影響,所以對(duì)應(yīng)的φ1和φ2的值會(huì)較大.相反,軸承存在內(nèi)圈故障和滾動(dòng)體故障時(shí),軸心軌跡會(huì)快速收斂,所以對(duì)應(yīng)的φ1和φ2的值會(huì)較小,表明此時(shí)轉(zhuǎn)子系統(tǒng)的穩(wěn)定性較好.因此,在該條件下,外圈故障對(duì)轉(zhuǎn)子系統(tǒng)穩(wěn)定性的影響較大.
隨著角加速度的增大(100 r/min2),因故障引起的單向沖擊對(duì)軸心軌跡的影響程度逐漸降低.軸承存在外圈故障和內(nèi)圈故障時(shí),軸心軌跡快速收斂至穩(wěn)定區(qū)域,其對(duì)應(yīng)的φ1和φ2的值也比較小.但是當(dāng)軸承存在滾動(dòng)體故障時(shí),軸心軌跡變得不規(guī)則,明顯偏離橢圓形狀,發(fā)散程度和不對(duì)稱度更高,其對(duì)應(yīng)的φ1和φ2的值也比較大.因此在該工況下,滾動(dòng)體故障對(duì)轉(zhuǎn)子系統(tǒng)穩(wěn)定性的影響較大.
在角加速度保持在一個(gè)較高水平時(shí)(300 r/min2),三種故障類型時(shí)的軸心軌跡都快速收斂至各自的穩(wěn)定區(qū)域內(nèi),形狀也趨于統(tǒng)一,這使得軸心軌跡所對(duì)應(yīng)的φ1和φ2的值偏差變小,如圖15 所示.然而,當(dāng)軸承存在滾動(dòng)體故障時(shí),其軸心軌跡更為發(fā)散,其收斂區(qū)域的對(duì)稱程度較低,所以其對(duì)應(yīng)的φ1和φ2的值依然較大.因此在該條件下,滾動(dòng)體故障對(duì)轉(zhuǎn)子系統(tǒng)穩(wěn)定性的影響是最大的.
5 穩(wěn)定性臨界狀態(tài)分析
高速列車在運(yùn)行過程中,軸承轉(zhuǎn)子系統(tǒng)可能會(huì)發(fā)生故障,導(dǎo)致其不能按照原來的速度繼續(xù)行駛,甚至停車.所以,確定列車在保持某一速度時(shí)所能允許的軸承最大故障尺寸具有較強(qiáng)的實(shí)際工程意義.本節(jié)重點(diǎn)討論在各個(gè)速度條件下,軸承所能允許的最大故障,即系統(tǒng)的穩(wěn)定性臨界狀態(tài)所對(duì)應(yīng)的故障尺寸.由于軸承結(jié)構(gòu)緊密,系統(tǒng)穩(wěn)定性較好,所以重點(diǎn)研究轉(zhuǎn)子系統(tǒng),即車軸的穩(wěn)定性臨界狀態(tài).定義車軸的穩(wěn)定性臨界狀態(tài)為車軸質(zhì)心軌跡對(duì)應(yīng)二維不變矩的值最后一次和無故障條件下的值相等或接近時(shí)的狀態(tài).根據(jù)之前章節(jié)的分析也可以看出,φ1和φ2的變化規(guī)律也類似,故本章僅以φ1為特征指標(biāo).
設(shè)置仿真工況為w0(t)=100,600,1100,1600,2100 r/min,分別對(duì)應(yīng)列車運(yùn)行速度 16.59,99.53,182.46,265.40,348.34 km/h.故障尺寸為0~3 mm,步長(zhǎng)為0.037 5 mm.以外圈故障為例,得到了φ1,ORF,rotor的變化規(guī)律,如圖17 所示.
其中,在轉(zhuǎn)速為2100 r/min 時(shí),有兩個(gè)臨界狀態(tài),基于實(shí)際工程要求,在軸承轉(zhuǎn)速較大時(shí),必然要求軸承故障尺寸越小越好,故取較小者.從圖17 中可以看出,總體上,軸承轉(zhuǎn)速越大,其穩(wěn)定性臨界狀態(tài)對(duì)應(yīng)的最大故障尺寸越小.這是符合實(shí)際情況的.因?yàn)殡S著軸承轉(zhuǎn)速的提高,軸承故障對(duì)系統(tǒng)的影響也會(huì)越來越大.但是這種影響機(jī)制是復(fù)雜且非線性的,在某些轉(zhuǎn)速條件下(如1600 r/min),故障尺寸的值不符合速度越高對(duì)應(yīng)故障尺寸越小這種規(guī)律.
按照同樣的方法分別計(jì)算了軸承存在內(nèi)圈故障和滾動(dòng)體故障時(shí)穩(wěn)定性臨界狀態(tài)對(duì)應(yīng)的最大故障尺寸,如表4 所示.
從圖17 和表4 中可以看出軸承轉(zhuǎn)速在較高水平時(shí),軸承所能允許的最大故障尺寸都比較小.在同一轉(zhuǎn)速條件下,外圈故障尺寸大都是最大的,而滾動(dòng)體故障尺寸大都是最小的.在變轉(zhuǎn)速條件下外圈故障對(duì)轉(zhuǎn)子系統(tǒng)穩(wěn)定性的影響也體現(xiàn)在了勻速工況下,在轉(zhuǎn)速較低時(shí),穩(wěn)定性臨界狀態(tài)對(duì)應(yīng)的最大外圈故障也比較小.由此可得出結(jié)論,當(dāng)列車運(yùn)行速度較小時(shí),對(duì)軸承外圈故障尺寸的要求相對(duì)比較苛刻,原因是此時(shí)外圈故障對(duì)系統(tǒng)穩(wěn)定性影響較大.當(dāng)列車運(yùn)行速度較大時(shí),穩(wěn)定性臨界狀態(tài)所對(duì)應(yīng)的滾動(dòng)體故障尺寸最小,也從側(cè)面證明滾動(dòng)體對(duì)系統(tǒng)穩(wěn)定性影響最大.

表4 不同轉(zhuǎn)速條件下穩(wěn)定性臨界狀態(tài)對(duì)應(yīng)的最大故障尺寸Table 4 Maximum fault size corresponding to stability critical state under different speed conditions

圖17 不同轉(zhuǎn)速條件下φ1,ORF,rotor 隨故障尺寸的變化規(guī)律Fig.17 Variation of φ1,ORF,rotor with fault size at different rotating speeds
6 結(jié)論
(1)提出了一種高速列車軸承轉(zhuǎn)子系統(tǒng)動(dòng)力學(xué)模型,模型通過角度迭代法確定了滾動(dòng)體在任意時(shí)刻的空間角度位置.利用MATLAB 計(jì)算得到了模型在勻速工況和變轉(zhuǎn)速工況下的振動(dòng)響應(yīng).通過相應(yīng)的實(shí)際軸承實(shí)驗(yàn),驗(yàn)證了模型在兩種工況下的有效性.
(2)利用軸心軌跡分析了外圈故障、內(nèi)圈故障和滾動(dòng)體故障對(duì)軸承轉(zhuǎn)子系統(tǒng)穩(wěn)定性的影響.并通過相應(yīng)的軸承實(shí)驗(yàn)進(jìn)行了驗(yàn)證.
(3)利用二維不變矩對(duì)定量分析了外圈故障、內(nèi)圈故障和滾動(dòng)體故障對(duì)軸承轉(zhuǎn)子系統(tǒng)穩(wěn)定性的影響.分析結(jié)果表明,在車軸角加速度較小時(shí),外圈故障對(duì)系統(tǒng)穩(wěn)定性的影響較大,而車軸角加速度較高時(shí),滾動(dòng)體對(duì)系統(tǒng)穩(wěn)定性影響較大.
(4)研究了不同軸承不同轉(zhuǎn)速條件下,轉(zhuǎn)子系統(tǒng)穩(wěn)定性臨界狀態(tài)對(duì)應(yīng)的最大故障尺寸.研究結(jié)果表明,軸承轉(zhuǎn)速較低和較高時(shí),所對(duì)應(yīng)的滾動(dòng)體故障尺寸較小.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
