基于多傳感器的內陸水域水上水下一體化測繪技術探索
2022-08-29 02:21:06楊溯陳龍胡一川山威
現代信息科技 2022年12期
楊溯,陳龍,胡一川,山威
(自然資源部第三大地測量隊,四川 成都 610100)
0 引 言
2015年6月1日,國務院批復同意《全國基礎測繪中長期規劃綱要(2015—2030年)》,提到要“持續整合、豐富、更新基礎地理信息資源”“加快建設新型基礎測繪體系,工作范圍由陸地國土向海洋乃至全球拓展,大幅提升基礎地理信息資源供給能力”,抓緊“啟動內陸水體水下地形測繪”。2019年自然資源部下發《自然資源部信息化建設總體方案》,提出“立足山水林田湖草整體的生態系統角度,實現面向國土空間全域、多尺度、多類型資源狀況和變化的統一的調查監測評價;推進二維調查走向三維調查,實現地上地下三維一體化監測評價。”內陸水下地形數據是水資源利用保護、水利工程項目建設的基礎性支撐。隨著單波束測深儀,尤其是具有較高的測點密度和較寬掃幅的多波束測深儀在水下地形測量領域的廣泛運用,水下地形獲取過程簡單、效率高、覆蓋度高,數據成果更加的精準可控,易于建立高精度水下地表模型及矢量數據模型。同時,利用航攝技術、雷達技術獲取地面影像數據、高密度點云數據,能夠實時高效地建設實景三維模型及高精度地球表面模型。
本文針對在使用多波束測深儀進行內陸水下地形測量過程中遇到的淺水區數據空白的問題,提出利用多波束側掃裝置及單波束船補測的方式消除空白區的方案。利用數據處理軟件提取機載LiDAR 數據地表點,融合水下聲吶點云數據,構建水上水下一體化數字高程模型,形成水陸一體化無縫高精度數字產品,一體化測繪工作效率以及成果精度得到有效提高。在此基礎上,結合自然資源調查數據、水文資料等,探索多時效、高精度水陸一體化數字產品在三維可視化、自然資源調查與監測、應急保障等方面的應用與服務。
1 水上水下一體化總體流程
通過進行水下多波束、單波束數據采集及數據處理、機載LiDAR 點云數據獲取與處理、機載傾斜攝影數據獲取及建設實景三維模型,水上水下多源數據無縫接邊處理,水上水下多源數據融合處理、水上水下一體化數據融合與應用,形成水上水下一體化測量技術體系。其總體流程圖如圖1所示。
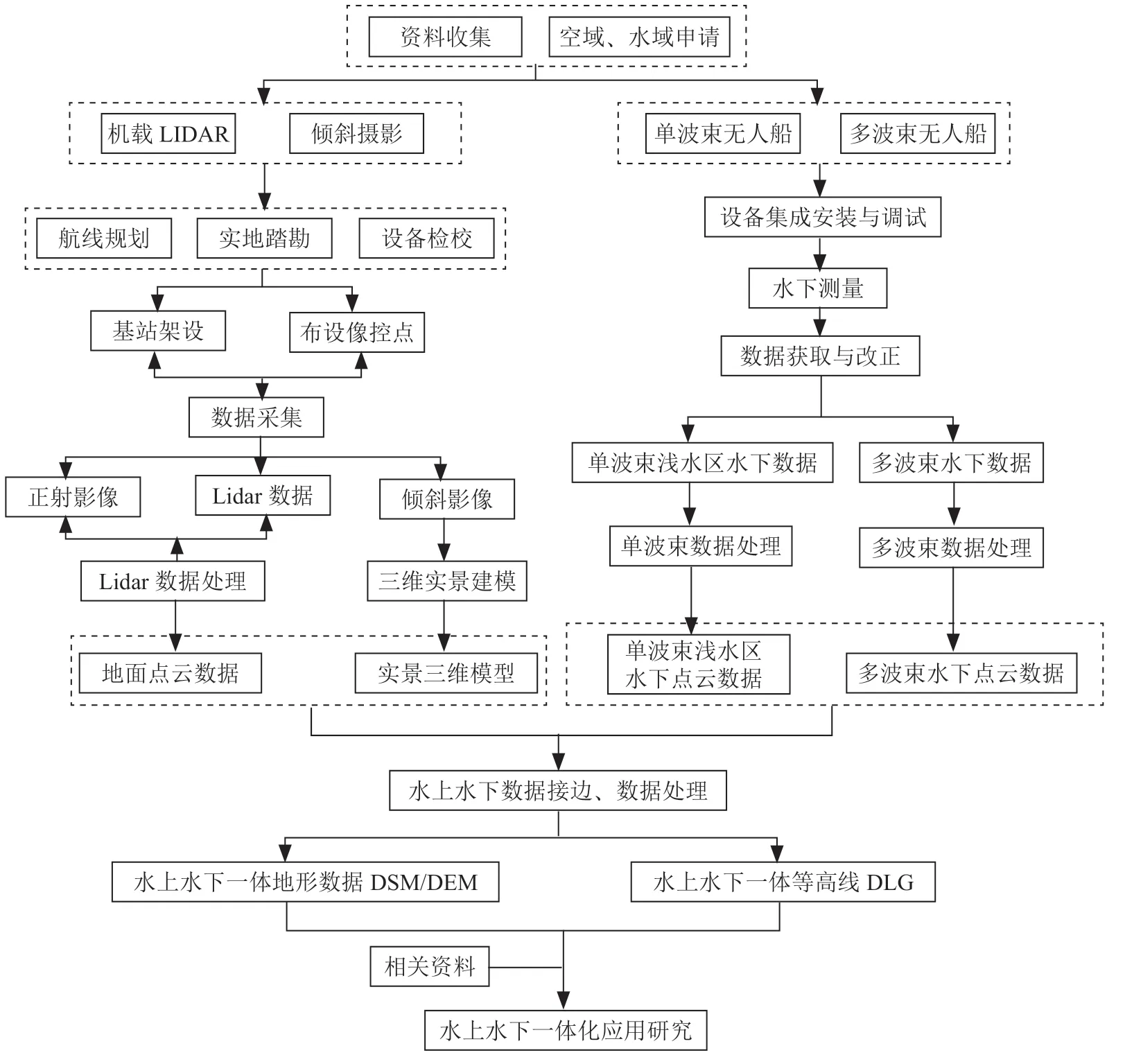
圖1 水上水下一體化總體流程圖
2 新型水下數據采集設備
水下數據采集使用的多波束無人船,搭載具有高集成性的高頻多波束測深儀、GNSS 接收機、集成甲板單元、工控機等裝置進行水下測量,相較于傳統多波束測量設備具有吃水淺、適航能力強、智能化程度高等特性,模塊化的無人船平臺,安裝拆卸便捷,大幅度提高了現場工作效率;可根據布設航線自主采集測區水下地形數據,實時回傳,數據精度滿足要求,且保障作業人員安全。多波束無人船及潛水區補測使用的單波束無人船的主要模塊、功能如表1所示。
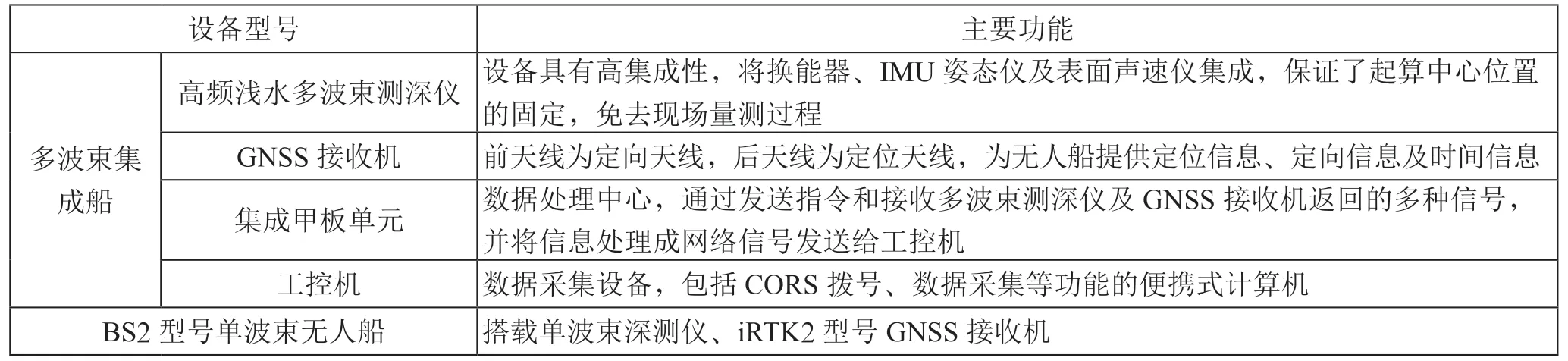
表1 單、多波束無人船主要模塊及功能表
3 多波束水下數據采集與數據處理
3.1 踏勘、確定控制方式
實地踏勘,根據實際情況確定使用多波束無人船作為測試載具,確認作業區范圍,使用單波束無人船、RTK、軌跡記錄儀,沿著作業區外圍巡視一圈,獲得作業區平面范圍后,在范圍內布設測線。無人船在作業過程中利用動態RTK 模式,使用RTK 模式差分GNSS 接收設備登錄CORS 賬號即可開始作業,實時獲取位置信息。
3.2 儀器檢驗及校準
在開展數據采集之前,設備安裝并檢查數據通信是否正常,時鐘是否同步,聲吶發收信號是否正常,根據異常顯示及時進行調試;調試完畢后下水進行主要性能指標測試與檢核,根據實測的水底地形找到合適的校準場進行多波束校準,布設校準線,完成首搖、縱搖、橫搖的校準數據采集,利用聲速剖面儀記錄的聲速及深度數據進行聲速改正。
3.3 水下數據采集
根據水域實際情況進行手動操作多波束無人船采集數據,如圖2所示。通過調節輸出頻率、波長、發射功率、發射開角等系數使采集數據最優化,根據探測布設的測線進行數據采集,采集過程中航線盡量與測線一致,航線速度保持一致,當航行出一段測線盡頭后才能停止該段數據的采集,航行至下一段測線外時開始下一段側線數據采集,直至設置范圍內所有側線采集完畢。
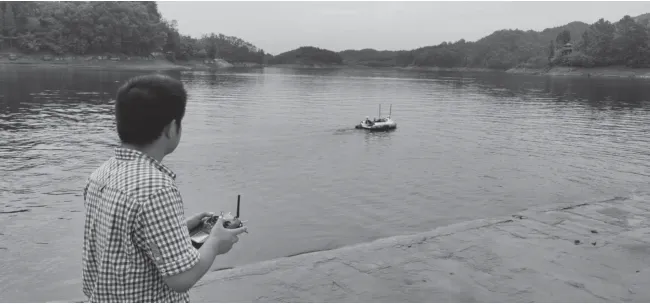
圖2 操作多波束無人船進行水下數據采集
3.4 數據處理
使用HydroNavi 軟件對水下數據進行兩次濾波處理,并進行數據較準,逐條濾波,清除噪點,導出坐標系為WGS84 的點云數據,高程系統為大地高系統,通過坐標轉換為CGCS2000 大地坐標系,通過似大地水準精化轉換為1 985 正常高。
3.5 精度核驗
在多波束測量中應布設至少一條檢查線,檢查線需跨越整個測區且與主測線正交,采用該檢查測線進行多波束測量數據的精度檢驗及精度分析。此方法可以評估多波束測量數據的各項誤差,包括傳感器的安裝誤差、水位校正誤差、聲速校正誤差、校準誤差等,保證多波束數據精度達到標準。
4 淺水空白區補測
針對內陸水域淺水區實際情況,因多波束探測器吃水較深而產生探測空白區問題,本文提出采用多波束側掃的方式及單波束無人船垂直岸邊掃描的方式進行補測。
本文采取無人船多波束側掃方法,來對淺水空白區域進行補測。多波束側掃試驗依舊需要進行側掃設備安裝調試、較準和數據獲取作業環節,使用定制的轉接頭使多波束探頭向船身垂直轉動30°,由于掃描數據是依照多波束發射Ping 所排列的掃描序列圖像轉換而來,如圖3所示,若探頭傾斜角度大于30°,會引起斜距變形、目標距離變形等,導致探測數據質量不達標。通過測試發現,針對內陸水域地形傾斜較大區域能夠彌補,但在內陸水域坡度平緩的淺水區域,由于多波束探頭吃水有一定深度以及探頭傾斜角度的影響,無法獲取能滿足精度要求的足夠數據。
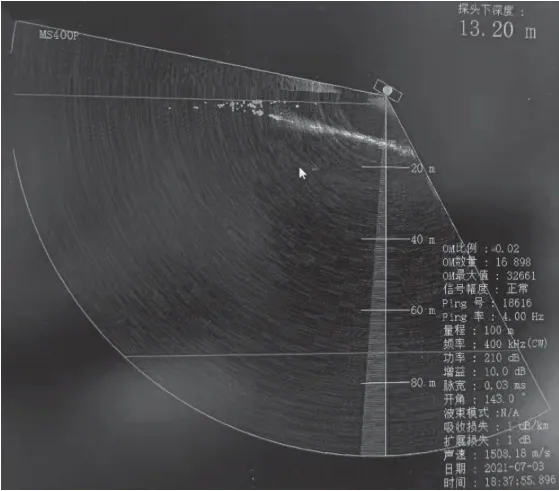
圖3 傾斜30°多波束側掃數據獲取情況圖
本文測試利用單波束無人船垂直于岸邊折線往返的方式進行補測,單波束無人船聲吶探頭內置,吃水較淺,補測范圍需同多波束探測范圍有一定重合,并盡量保證單波束補測范圍地形高差較小或平緩,補測線路如圖4所示。所獲得的垂直岸線的水下地形數據能夠很好地擬合出平滑的等高線,減少空白區域地形數據內插編輯的工作量,提高數據的準確性,利用單波束無人船垂直岸線補測的方法能夠很好地彌補內陸淺水區空白問題。
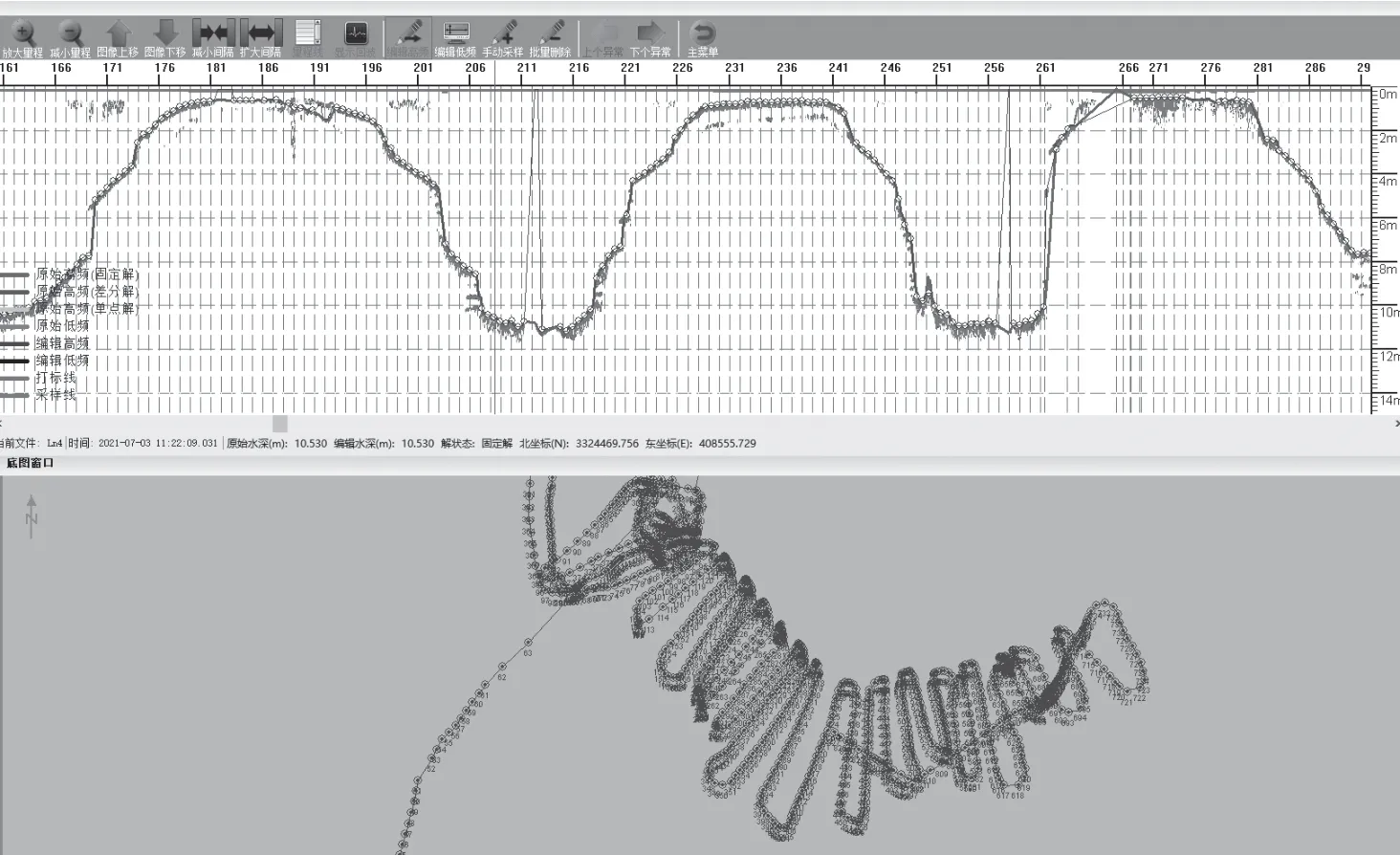
圖4 單波束無人船淺水區補測路線圖
5 水上數據獲取和處理
基于多旋翼無人機攜帶機載激光雷達設備進行水上數據獲取,完成八字校準后,根據設定航線完成機載激光雷達作業范圍掃描工作。通過導入點云數據、地面站數據、POS 參數等在軟件中進行點云濾波、點云關鍵點確定、點云配準、點云分割與分類、SLAM 圖優化、目標識別檢索、幻化檢查、三維重建、點云數據管理等機載LiDAR 數據預處理工作。
使用五鏡頭傾斜數碼航攝儀進行拍攝,保證下視影像分辨率優于0.1 m;并進行像片控制測量,利用GPS 連續運行跟蹤站按網絡RTK 方式測量,控制點的精度滿足1:2 000地形圖要求;基于航空影像及POS 數據,采用區域網方式進行空中三角測量,利用相片控制資料成果,在空三加密軟件程序中開展控制點量測,進行平差解算;在實景三維建模軟件中,經測區分塊、像對篩選、點云計算、點云構網、紋理映射等制作實景三維模型。
6 水上水下一體化數據融合處理
將機載三維激光點云數據(las 格式)、單波束無人船補測數據(csv 格式)、多波束無人船掃測數據(xyz 格式)導入點云數據處理軟件,進行多元點云數據融合處理。由于多源數據時空基準存在不一致,精度差異大的問題,需進行點云配準,形成無遮擋、無空洞、覆蓋完整的統一點云數據。不同源數據存在密度不均勻,細節程度不一致的問題,需進行點云清洗及增強,形成尺度一致、多細節層級組織融合的數據。如圖5側視圖及圖6俯視圖所示,多波束無人船測量的整個水下地形、單波束無人船對潛水空白區域進行補測、機載激光雷達設備獲取的地表著色點云數據通過融合處理,形成精度統一、無縫的點云數據。

圖5 多源點云數據融合無縫切面圖
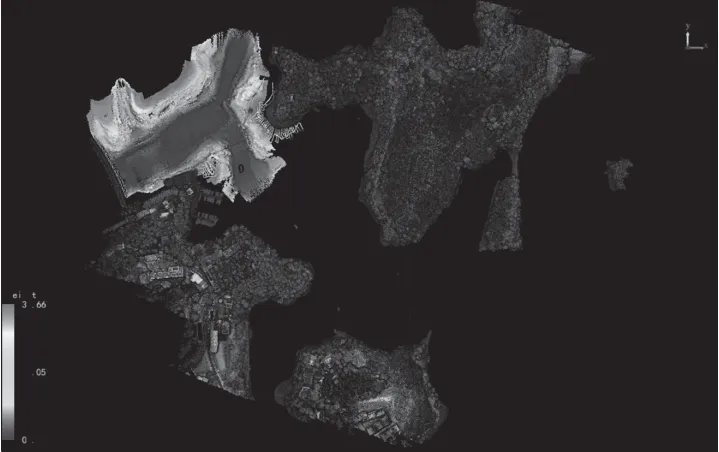
圖6 多源點云數據融合俯視圖
通過噪聲濾波、按高程提取所需地面點、地面點分類、點云平滑、生成數字高程模型、生成等高線等數據處理方法,最終能夠形成如圖7所示的精度較高的水上水下一體化數字高程模型(DEM)、等高線(DLG)等一體化數字產品。
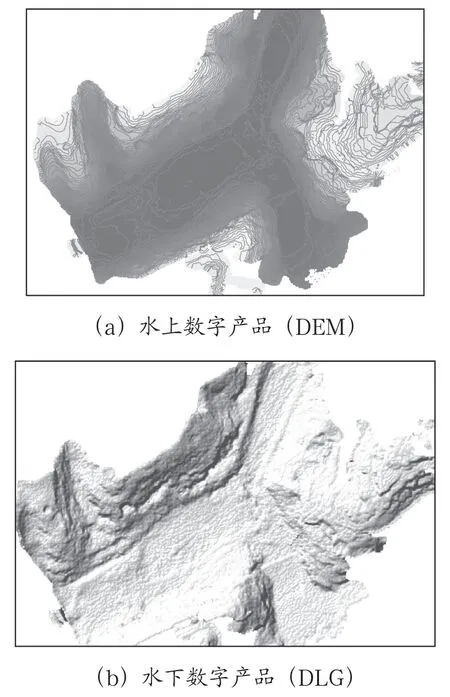
圖7 水上水下一體化數字產品(DLG、DEM)
7 水上水下一體化數字產品應用
水上水下一體化數字產品在三維可視化展示平臺支持實時在線的多種類查詢、量測及分析,將基礎測繪產品應用到更多環境場景中。本文利用Cesium 可視化仿真平臺三維展示平臺,支持水上水下多傳感器獲取不同類型的數據轉換及發布,實現了用戶在三維GIS 網絡服務中對內陸水域數據范圍三維實景模型的瀏覽、交互操作及擴展運用,使三維數字場景呈不同細節層次的展現。
在江河、湖泊、水庫等內陸水域,獲取不同時相的水上水下地形數據,在三維可視平臺上對地形、斷面的變化進行動態展示,并進行演變分析、水位演示等三維可視化表達;并能對水庫庫容、沖刷淤積量等難以精準獲取的數據指標,通過水上水下一體化數字產品形成高程模型(DEM)并進行多期數據對比分析,實現對水下泥沙輸移的定量分析計算及可視化分析。
8 結 論
本文提出利用多波束側掃裝置及單波束船補測的技術方案,消除多波束測深儀進行探測時所形成的淺水區數據無法獲取的問題;提出利用點云數據處理軟件,同時處理機載LiDAR 或傾斜攝影獲取的地面點云數據及水下單、多波束測深儀獲取的水下點云數據,構建水上水下一體化數字高程模型,形成水陸一體化無縫高精度數字產品;據此,本文提出測繪工作效率以及成果的準確性較高的內陸水域水上水下一體化工藝流程。
在未來,經濟的快速發展及科技的持續進步推動著水下探測技術不斷更新迭代。結合高精度位置服務及大數據分析等技術,更高效、精準的獲取水上水下數據,生產高精度一體化三維數字產品,運用更多的行業數據資料,形成一套多時相、多尺度、多運用方案的數據庫產品。在此基礎上,更有效利用水上水下一體化高精度數字產品,結合水資源調查與監測、水資源保護、防洪等實際需求,開展水上水下三維可視化與GIS 空間分析的應用研究,提升自然資源信息化建設能力,為生態文明建設、數字中國建設提供更好的支撐。