一種新型蛇形機器人的機構研究與設計
2022-08-29 02:21:24柳炳琦任米鑫鄭瑞唐羽峰
現代信息科技 2022年12期
關鍵詞:設計
柳炳琦,任米鑫,鄭瑞,唐羽峰
(成都大學,四川 成都 610106)
0 引 言
蛇形機器人在無損檢測、軍事探測、醫療救護和航空航天等領域取得了長足的發展,在保障國家安全、推動經濟發展和技術進步方面發揮著至關重要的作用。蛇形機器人因具有體積小、自由度高、適應性強等特征,適合應用于復雜的工作環境中。
縱觀國內外研究現狀,蛇形機器人因具有在空間范圍內運動的能力而成為研究熱點。許多學者研究的蛇形機器人存在三維空間運動能力弱的問題,導致蛇形機器人出現運動能力差、結構不穩定的情況。鑒于此,本文提出并設計一種新型蛇形機器人機構,通過合理的機構設計,減小了蛇形機器人結構的復雜性,為系統后期的維護提供便利。通過仿真實驗充分驗證了該蛇形機器人機構設計的合理性,達到了預期效果。
1 機構系統方案設計
蛇形機器人的機械系統由蛇身關節、蛇頭關節和蛇尾關節組成。通過分析生物蛇的運動方式(蜿蜒運動、收縮運動、斜側運動等)和骨骼構造,采用SolidWorks 三維設計軟件對蛇形機器人的整體機構進行設計。要使蛇形機器人像生物蛇一樣具有豐富的運動步態,蛇身具有盡可能大的自由度是關鍵。蛇形機器人是基于摩擦的原理進行運動的,所以蛇身的長度決定了蛇形機器人運動的性質,而要想蛇形機器人的長度能夠改變,蛇形機器人應該具備可以更改長度的能力。所以選用可重構式的結構,這樣的結構更加簡單和方便,控制起來也不復雜,蛇身的總長度由單節蛇身的長度和蛇身的節數共同決定,整體設計圖如圖1所示。
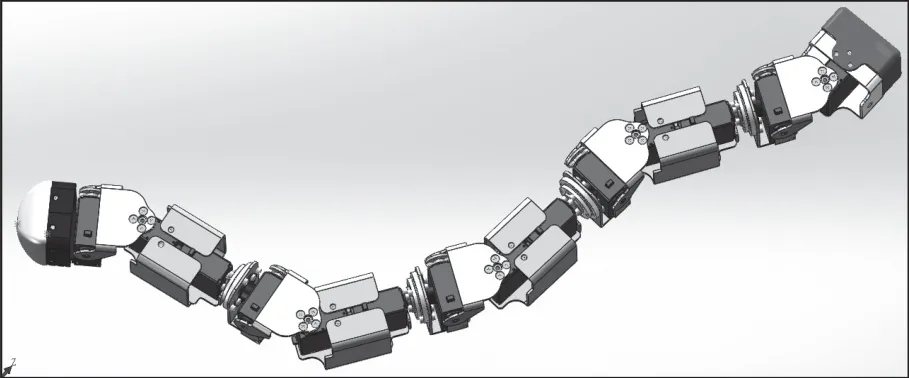
圖1 蛇形機器人整體設計圖
1.1 蛇身關節模塊設計
蛇身關節采用P-R 連接方式,這種連接方式具有高自由度與高可靠性,其原理為兩個相互正交的旋轉副之間可以相對轉動,從而產生一個球形空間范圍內的移動。采用這種連接方式,在實現三維運動的同時可以減小蛇形機器人模塊的載荷,從而延長驅動模塊的使用壽命。P-R 連接方式的機構簡圖如圖2所示,對蛇身關節上用于驅動的舵機的位置布置進行設計。

圖2 P-R 連接方式機構簡圖
在建模之后,確定的單節蛇身結構如圖3所示,當蛇身重構數量足夠多時,通過每節橫移舵機的旋轉產生各節蛇身之間的夾角,每一節的夾角相累加,就能得到總體的彎曲弧度,再通過橫移舵機的帶動產生蛇蜿蜒運動的效果;俯仰舵機主要是實現蛇形機器人高度抬升、關節俯仰變化的效果。在每節蛇身連接處采用電滑環的目的是解決蛇身旋轉繞線的問題。同時,電滑環與軸承轉盤的組合可以使蛇身的旋轉相對獨立,即每節的旋轉不會對其他節造成影響,這樣的設計可減少蛇身的翻轉舵機在翻轉過程中所受到的載荷,保證舵機的旋轉精度,使步態更加完整和精確。其次,若將舵機替換為電機,則能夠使蛇形機器人實現類似輪式運動的步態。當蛇身呈“凹”字形伸展時,兩臂側的蛇身可以作為蛇形機器人的“輪”,通過兩節蛇身的轉動,帶動蛇形機器人運動。
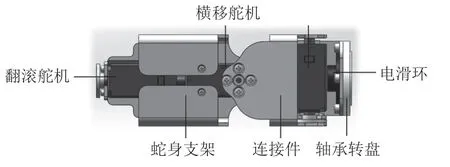
圖3 蛇身關節結構圖
1.2 蛇頭關節模塊設計
蛇頭關節模塊是蛇形機器人的關鍵所在,其承載了整個系統的核心部件(主控制板、攝像頭等),如圖4所示為蛇頭關節模塊設計圖。蛇頭的設計綜合考慮了與蛇身關節的高度連接,其中1 為蛇頭舵機連接件,2 為蛇頭面罩固定模塊,3 為蛇頭面罩,4 為控制蛇頭上下轉動的舵機。
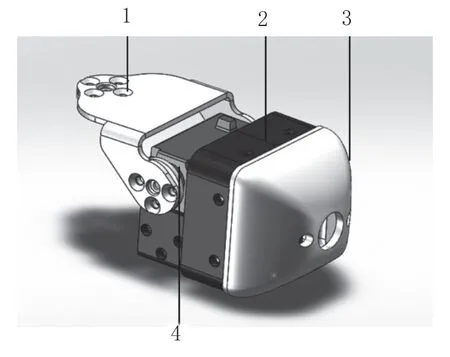
圖4 蛇頭關節模塊設計圖
1.3 蛇尾關節模塊設計
蛇尾關節模塊承載著整個系統的傳感模塊(激光測距傳感器、溫濕度傳感器),其設計要點與蛇頭類似,如圖5所示為蛇尾關節模塊設計圖。蛇尾的設計也需要考慮與蛇身關節的高度連接。
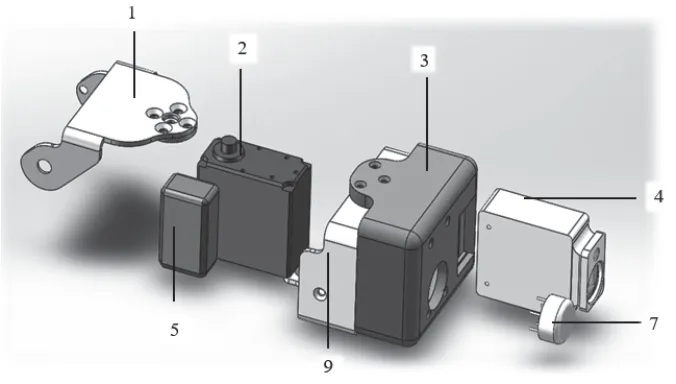
圖5 蛇尾關節模塊設計圖
圖例:(1)蛇尾連接件;(2)控制蛇尾轉動的舵機;(3)蛇尾面罩;(4)測距激光傳感器;(5)鋰電池;(6)傳感器固定模塊;(7)溫濕度傳感器
2 蛇身關節有限元分析
對蛇身關節的受力處進行有限元分析,驗證結構的有效性,蛇形機器人的關節在運動過程中主要受力的部件有兩個,分別是連接件與蛇身支架。連接件所受的力為俯仰方向與橫向移動的拉應力,所以,按照最大拉應力的零件危險處發生脆性斷裂破壞的條件是:


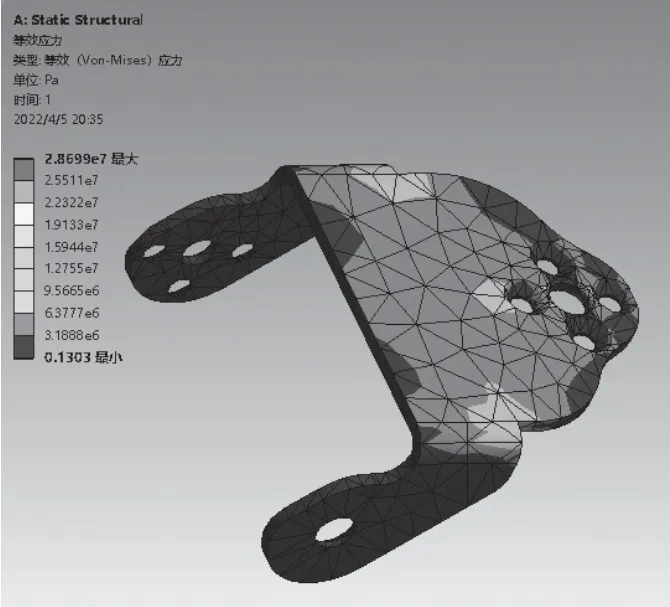
圖6 連接件應力云圖
同樣,對蛇身支架進行有限元分析。蛇身機架所受到的載荷主要為相鄰連接件間的幾節蛇身橫向移動的切應力。根據材料發生屈服破壞的條件為:

式(3)中,最大切應力達到單向應力狀態下的極限切應力 ,每一節蛇身的總體重量約為500 克,舵機可以提供的扭矩為22 kg/cm,考慮到第5 節蛇身機架所受的橫向阻力為28 N,對第五節蛇身機架進行應力應變分析,分析結果如圖7所示。
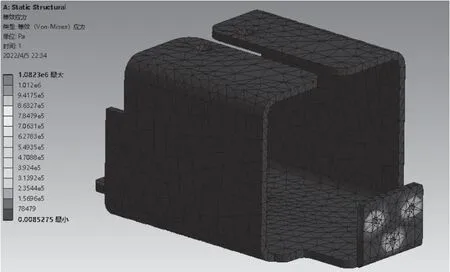
圖7 蛇身機架應力圖
通過對兩個主要受力部件 的分析可以得出,設計是完全合理的,能夠滿足正常工作所需的應力要求,所以可以采用當前的蛇形機器人結構進行下一步的運動仿真。
3 蛇形機器人運動仿真
蛇形機器人的運動控制方式特別多,比較主流的控制方式有三種。第一種是近年來比較火熱的CPG 控制方式;第二種是通過反復實驗所得到的運動步態控制方式;第三種是基于Serpenoid 控制 函數進行控制,也是本文采用的控制方式。Serpenoid 控制函數是模仿蛇體真實運動的控制函數,由日本教授Hirose 通過長期觀察蛇類生物的運動而得來。結合本文設計的蛇身結構,可得改進的角度函數為:

式(4)中,為蛇形機器人的關節個數1,2,3……,為蛇身轉動的頻率,φ為第節蛇身與第-1 節蛇身的夾角,為角度函數的初始相位,為系統的偏轉角為0 時蛇身轉角的幅值,為系統的偏轉角。
將=0,=0 代入式(4)進行初始位置計算,發現=0時舵機并不在初始位置,故對上式進行改進,改進后的公式如(5)所示,添加了一個影響因素,這里≥1。

運動仿真即是對所設計機械結構運動能力的檢驗,利用專業的仿真軟件可以在模擬環境的狀態下分析機械結構的運動能力,得到其運動參數,及時緩解結構上所存在的一些阻礙運動的問題,減少研發產品的周期時長,縮減設計和生產成本。在運動仿真這一模塊中,采用的分析軟件是Adams,因為Adams 是可以進行虛擬樣機分析的應用軟件,用戶可以使用該軟件對虛擬機械系統進行靜力學、運動學和動力 學分析。
將SolidWorks 中制作好的模型轉換為.x_t 格式并導入到Adams/View 中,設置好約束、運動副、接觸力以及驅動函數,運用如前所述的Ser penoid 控制函數實現運動控制,并對蜿蜒這一步態進行步態仿真。首先導入格式為.x_t 的裝配體;然后對裝配體的部件進行約束,如圖8所示;接著對運動副施加驅動力,再對運動進行仿真,得到仿真結果。
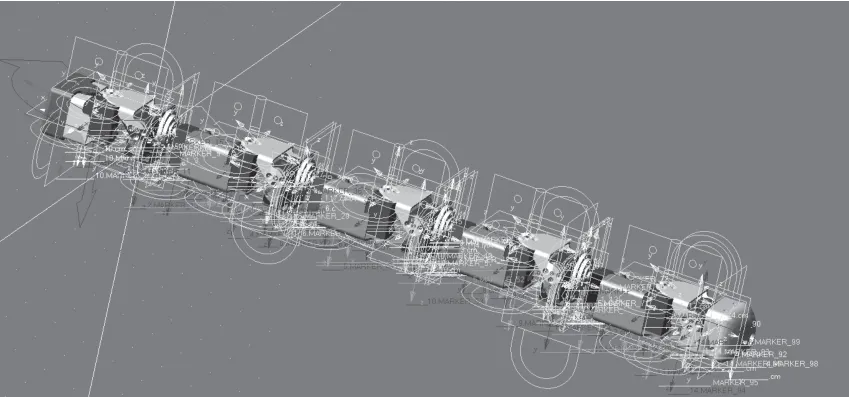
圖8 Adams 中對模型施加約束圖
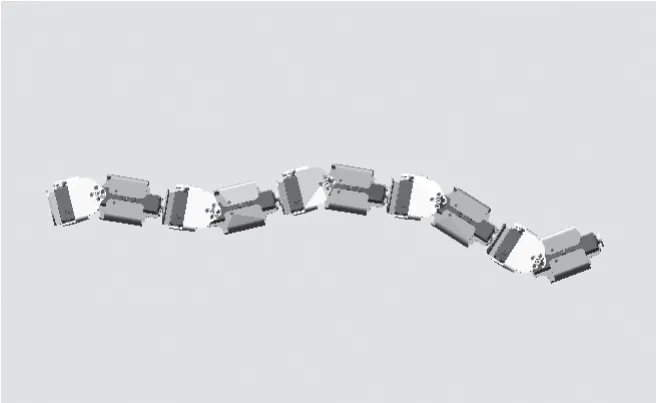
圖9 蛇形機器人A=時的步態仿真
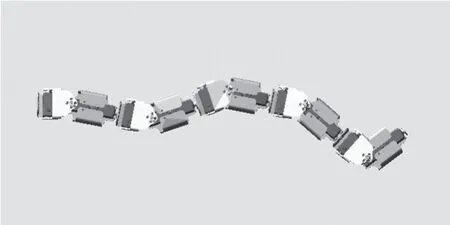
圖10 蛇形機 器人A=時的步態 仿真
蛇形機器人的蜿蜒運動類似于弦波函數的圖像,各節蛇身之間的夾角 越大,蛇形機器人的蜿蜒步態曲率也會隨之增大,就會出現類似弦波函數圖像的波峰與波谷的步態。要保證蛇身有一定的蜿蜒運動曲率,但又不能過大,蛇身才能更好地利用蜿蜒運動產生的摩擦力進行平移,所以合理確定蛇形機器人的蜿蜒曲率是保證蛇形機器人更好運動的前提。
通過運動仿真可以看出蛇形機器人的蜿蜒運動曲率較為明顯,在保證其他參數不變的情況下,參數的值越大,蛇形機器人的擺動幅度越小。所以,蛇形機器人的結構能夠支撐其進行各種相應的運動,設計方案比較合理。
4 結 論
本文論述了采用多自由度與高穩定性P-R 連接方式蛇身機構的可行性,電滑環和軸承轉盤的組合結構取代了傳統的蛇 身舵機之間的直連方式,更能適應多變的環境。基于Serpenoid 控制函數控制蛇形機器人的蜿蜒步態,通過對所設計結構的有限元分析驗證了本模型的合理性,通過Adams 運動分析驗證了蛇形機器人模型的可行性。該結構具有組成簡單、抗干擾能力強、控制方便、研發成本低等優點,為野外探測、軍事偵察等活動提供了極大的便利。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04