港口自動駕駛現狀及典型場景測試技術研究
2022-08-29 08:01:40和福建馬文博田曉笛
汽車電器 2022年8期
關鍵詞:港口
和福建,馬文博,田曉笛
(1.中汽研軟件測評(天津)有限公司;
2.中汽研汽車檢驗中心(天津)有限公司,天津 300300)
1 引言
當前,隨著中國經濟的快速發展,全世界港口排名前10的就有7家在中國,同時港口的吞吐量逐年增加,造成了港口駕駛員的大量缺乏,經常有設備但無人操作的情況。隨著社會的快速發展,在傳統車輛上安裝激光雷達、毫米波雷達、攝像頭、OBU等傳感器,配合自動駕駛計算平臺和高精度地圖,實現車輛的自動駕駛運行,從而港口碼頭集裝箱運輸向著遠程控制、無人操作、自動裝運的智能化方向發展,可以解決駕駛員缺乏的難題,提高安全系數的同時還能降低運營成本,提升運營效率。
從行業趨勢來看,在智能網聯汽車全面商業化運營中,商用車將會更先落地。從市場需求來看,駕駛的安全性和提高物流運行效率兩大因素會更加促進自動駕駛商業車的落地,同時與乘用車相比,在自動駕駛場景和法律法規方面,商用車也有著先落地的優勢。
車輛自動駕駛技術應用落地需具備充足的安全性保障,對此目前尚沒有成熟完整的評價方法。同時由于相關法律法規現狀的制約,高等級自動駕駛車輛要實現在道路上的運行還存在障礙,因而自動駕駛車輛技術和產品要給予實際應用進行迭代演進面臨困難。在港口運行的自動駕駛車輛,具有不受法規限制、運行環境簡單、投放技術經濟性好等優勢。場景的復雜程度是自動駕駛技術落地應用的關鍵因素之一。港口物流車絕大部分時間運行在非道路半封閉環境,交通環境簡單、業務場景明確,因而是最有可能率先實現自動駕駛應用的車輛類型。同時,使用純電動的無人集卡還可以降低港口設備的燃油成本,實現尾氣零排放,對國家綠色港口的建設有重要意義。
當前應用在港口自動駕駛的主要車型有解放J7,在其搭載智加科技L4級別的港口作業系統,可以實現自動規劃行駛軌跡、自動檢測障礙物避障、自動檢測裝載狀態及燈光系統、自動行駛至加油區加油,可完成自動裝貨、行駛、轉向、停車、卸貨等港口作業。解放ICV車輛能完成港口自動裝卸、運輸集裝箱全流程工作,是國內首款L5級別港口示范運營車輛。重汽豪沃T5G,應用在天津港是一款純電動車型,可實現裝卸集裝箱及運輸過程的自動化。紅巖5G智能重卡,利用5G-V2X技術實現精確停車與自動化港機設備交互。當前已有多家企業在國內港口進行了布局,如表1所示。
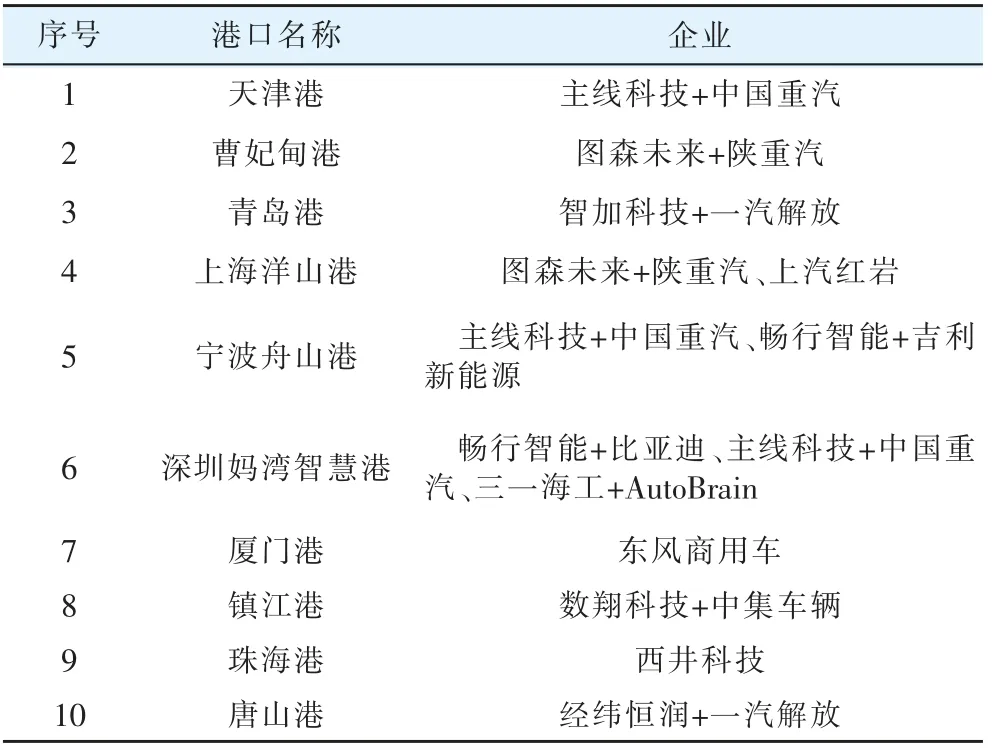
表1 國內企業在港口布局情況
2 典型場景測試
為驗證車輛的自動駕駛功能,需設計相應的場景進行測試。對港口車輛自動駕駛功能進行測試時,需要建立人、車、路協同的應用功能場景。首先需要建立合適的測試場景,包括道路情況、交通狀態、智能路側設備等;然后需要建立可實施的測試方案,完成港口車輛自動駕駛功能的典型場景實現。
港口未來發展的趨勢是集裝箱的自動化運輸。對港口的智能化改造主要有兩種方式:第1種是采用自動導引車(Automated Guided Vehicle)加上地面埋設磁釘的方式,需要對基礎設施進行大規模的改造,成本較高,且路線比較單一;第2種是采取無人駕駛牽引車,通過對車輛的智能化改造,可方便地在碼頭和堆場之間進行運輸,成本相對較低,運輸路線也更加靈活。兩者之間的區別見表2。
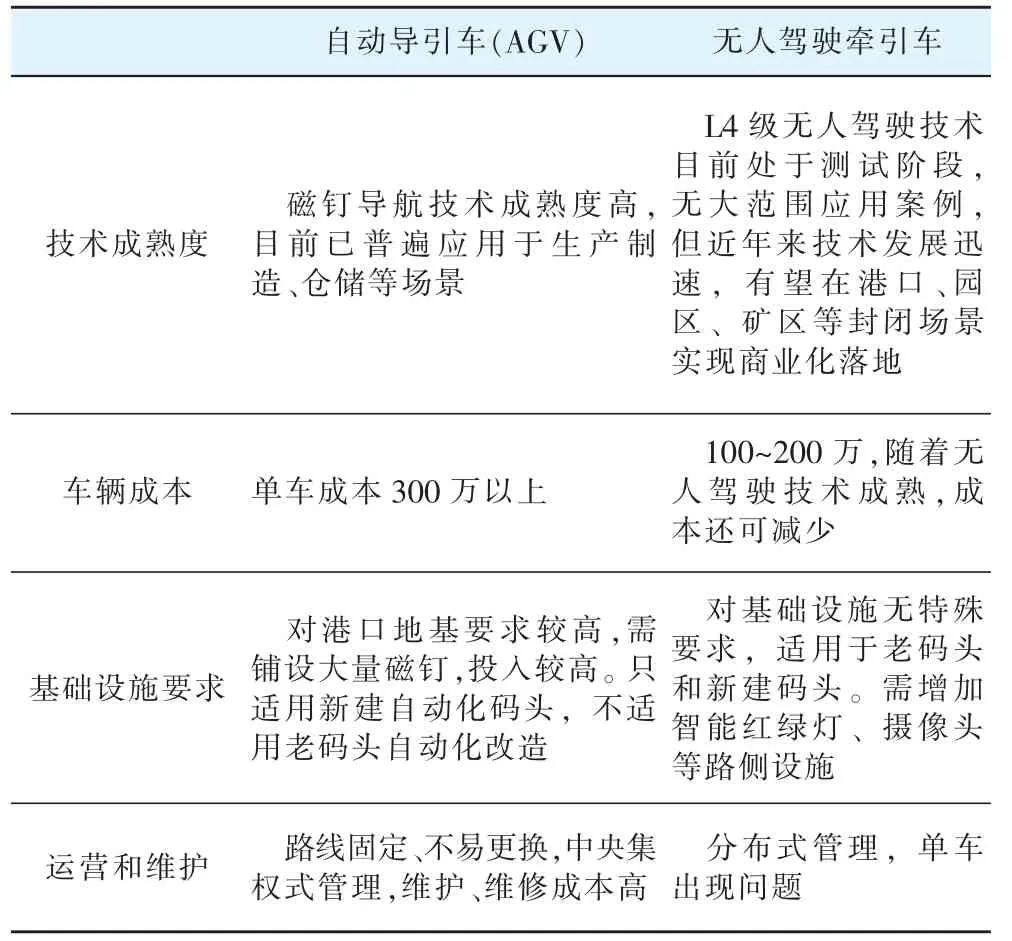
表2 自動導引車與無人駕駛牽引車的比較
2.1 測試場景設計
對港口典型測試場景的設計可以從靜態和動態兩部分考慮。在靜態部分需要考慮測試所需場地、測試場景和路側設備的布置。測試所需場地的選取一般由測試需求來確定,路側設備的布置主要考慮場地利用的高效性。在動態部分需要考慮場景設計的有效性和針對性。一般可從功能分析、測試方法、實際測試設備能力來進行設計。
在港口自動駕駛功能測試方面,檢測項目的確定主要考慮以自動駕駛測試安全為底線、注重測試場景的典型性和代表性、注重測試的操作可行性和合理性。具體檢驗項目見表3。在外場測試時,應選擇平坦、干燥的瀝青或混凝土路面、清晰的交通標志標線、良好的天氣環境、無復雜的電磁環境干擾等。
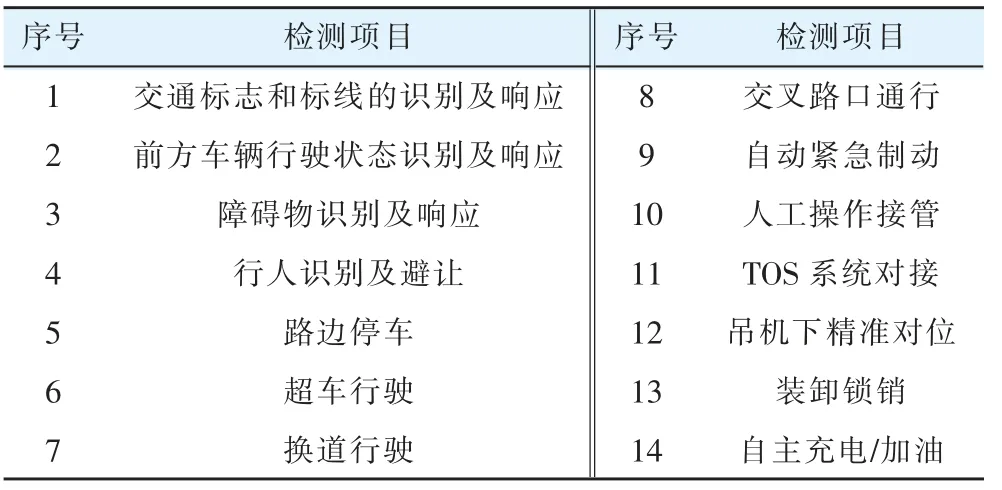
表3 智能網聯汽車港口自動駕駛功能檢測項目
2.2 落地因素
本文對影響商用車和乘用車自動駕駛落地的因素進行了分析,對商用車來說解決方案的成本是最重要的,其次是整車廠的接受程度、場景落地速度和技術;對乘用車來說最重要的是安全性和技術的成熟度,其次是消費者接受程度和出現事故后的法律責任問題。如表4所示。
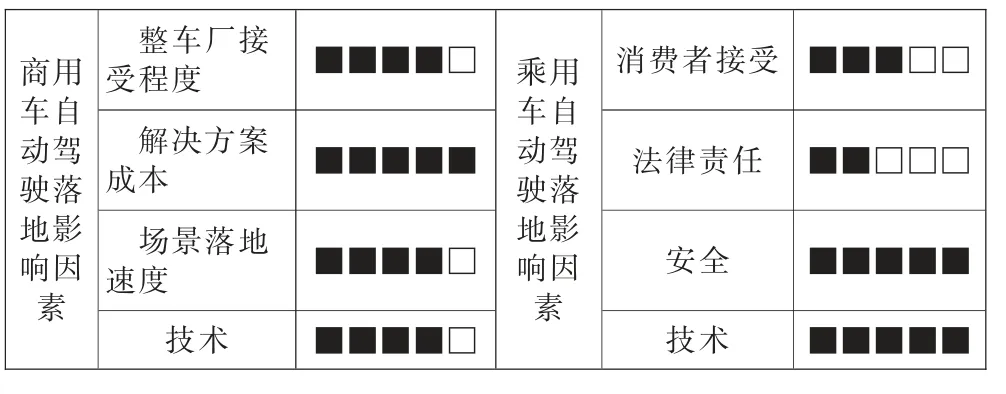
表4 自動駕駛落地影響因素分析
3 典型場景及其分析
為了完成港口自動駕駛功能的測試,驗證車輛的整體性能,根據表3所列的檢測項目設計合理的測試場景,包括實驗的場地、道路的選擇、路側的基礎設施等,并對每個測試場景進行了分析。
3.1 TOS系統對接
如圖1所示,測試車道為至少包含一條車道的長直道,測試車輛靜止在車道上。測試車輛在自動駕駛模式下,發送登錄消息到TOS系統,TOS系統發送相關任務命令到測試車輛,記錄測試車輛的解析內容和確認信號。應連續進行10次測試,統計成功率和準確率。該場景主要目的是測試自動駕駛系統和TOS系統對接功能,評價測試車輛和TOS系統通信的能力。
3.2 吊機下精準對位
如圖2所示,測試車道為至少包含一條車道的長直道,測試車輛勻速行駛。在吊機下方設置停車位。測試車輛在自動駕駛模式下以30km/h車速沿車道中間勻速行駛,以適當方式向測試車輛發出到達場橋并精準定位指令。該場景主要目的是測試自動駕駛系統和吊機縱向相對定位的能力。
3.3 裝卸鎖銷
如圖3所示,測試車道為至少包含一條車道的長直道,測試車輛勻速行駛。測試車輛在自動駕駛模式下以30km/h車速沿車道中間勻速行駛,以適當方式向測試車輛發出到達裝鎖區域指令。該場景主要目的是測試自動駕駛系統實現裝卸鎖銷的能力。
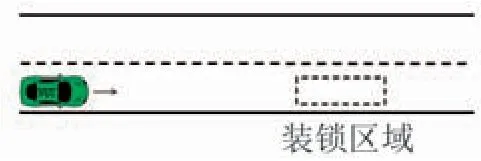
圖3 裝卸鎖銷場景
3.4 自主充電/加油
如圖4所示,測試車道為至少包含2條車道的長直道,測試車輛勻速行駛。測試車輛在自動駕駛模式下以30km/h車速沿車道中間勻速行駛,測試車輛初始電量/油量略高于閾值,行駛一段時間后,電量/油量應低于閾值。該場景主要目的是測試自動駕駛系統實現自主充電/加油的能力。
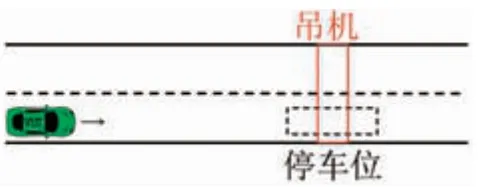
圖2 吊機下精準對位場景
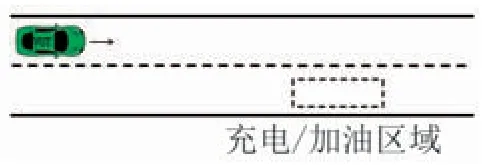
圖4 自主充電/加油場景
4 結語
駕駛的安全性和降低物流成本是自動駕駛商用車落地的主要動力。和乘用車相比,商用車在自動駕駛方面有著更明確的目標、實際需求和商業場景,有著更早的落地時間。本文調研了企業在國內港口的布局現狀,分析了影響自動駕駛落地因素,提出了智能網聯汽車港口自動駕駛功能檢測項目,設計了典型測試場景以及測試要求。但目前商業化落地也有幾個難題亟需解決:①激光雷達等智能化設備還未達到車規級要求,成本偏高;②自動駕駛車輛如何保障安全;③缺乏規范技術和產品的產業標準;④相關法律法規不太完善。
猜你喜歡
環球時報(2023-01-29)2023-01-29 15:13:42
金橋(2022年10期)2022-10-11 03:29:46
金橋(2022年10期)2022-10-11 03:29:36
金橋(2022年10期)2022-10-11 03:29:22
機電設備(2022年2期)2022-06-15 03:20:38
青年文學家(2022年2期)2022-03-17 21:57:14
閱讀與作文(小學高年級版)(2020年4期)2020-05-26 14:15:02
當代工人(2019年20期)2019-12-13 08:26:11
數學大王·趣味邏輯(2019年2期)2019-01-23 10:49:26
水上消防(2018年4期)2018-09-18 01:49:38
