高效能同步磁阻電機數據驅動型模型預測控制方法*
2022-08-31 06:55:26曹曉冬趙雙雙
電機與控制應用 2022年5期
曹曉冬,徐 晴,趙雙雙,陳 飛,朱 君
(國網江蘇省電力有限公司營銷服務中心,江蘇 南京 210019)
0 引 言
同步磁阻電機(SynRM)具有轉矩密度高、高效節能等特點,近年來在地鐵、航空等領域應用廣泛[1-3]。與此同時,各類高性能驅動方法應運而生,有限狀態集模型預測控制(FCS-MPC)[4]便是其中之一。該方法以SynRM時域狀態空間模型為基礎,結合微分方程泰勒級數展開[5],從而建立SynRM系統離散預測模型。上述過程不可避免地涉及多個SynRM電氣參數,如電阻、電感和磁鏈[6],然而對于實際工程場景,考慮到復雜且惡劣的工作環境,SynRM參數受工作點、環境溫度等多因素影響[7-9],離線參數計算或在線參數辨識難度較大[10-12]。
基于此,本文提出一種數據驅動型模型預測控制(DD-MPC)方法,基于系統輸入輸出數據關系實現“邊建模、邊控制”,并設計了一種DD-MPC輸入輸出數據關系的高更新率實現方法,保證系統穩定收斂。基于25 kW樣機對DD-MPC控制效果進行測試與分析,與傳統FCS-MPC方法相比,該方法保留了FCS-MPC的快速性和靈活性,并可以有效提升系統的穩定性。
1 FCS-MPC電流預測過程
SynRM調速系統預測電流控制的基本思想為:
(1) 基于SynRM離散預測模型完成對各電壓矢量所對應的轉矩電流、磁鏈電流進行預測;
(2) 根據調速系統控制目標,構建合理描述控制目標跟蹤誤差的價值函數J;
(3) 進行在線滾動優化,滿足J取值最小的電壓矢量,將其作為最優電壓矢量選定并輸出。
為實現SynRM轉矩、磁鏈高性能跟蹤控制,本文設計價值函數J,表達式為

(1)
uz表達式為
(2)
式中:Udc為逆變器直流母線電壓。
圖1給出了SynRM調速系統電流預測過程,式(1)中給出了描述轉矩電流、磁鏈電流跟蹤誤差的簡化二次型價值函數。可以看出,電流預測精度直接決定了預測電流控制的性能,FCS-MPC與DD-MPC的核心差異也主要在此。為便于推演DD-MPC數據驅動原理,首先對SynRM數學模型進行分析:
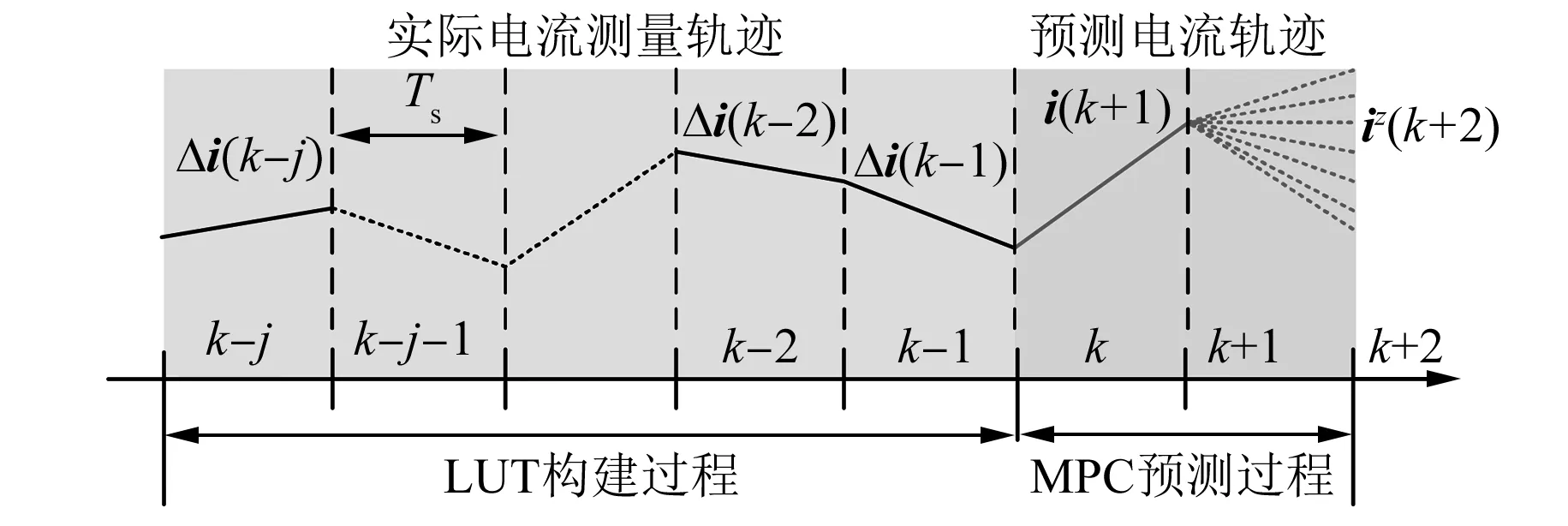
圖1 電流預測過程分析

(3)
式中:i為三相電流矢量;ld、lq為d、q軸差模電感;ldq為d、q軸共模電感;ωme為電機機械角速度;Ld、Lq為d、q軸等效電感;u為定子端口電壓;R為定子等效電阻。
可以看出,式(3)中SynRM核心參數直接受工作點、環境溫度等影響。以磁鏈參數為例,圖2中給出了考慮飽和效應影響的SynRM磁鏈變化規律,圖中In為電機磁飽和額定電流。因此,FCS-MPC為實現高精度電流預測需進行復雜的離線參數計算或在線參數辨識。
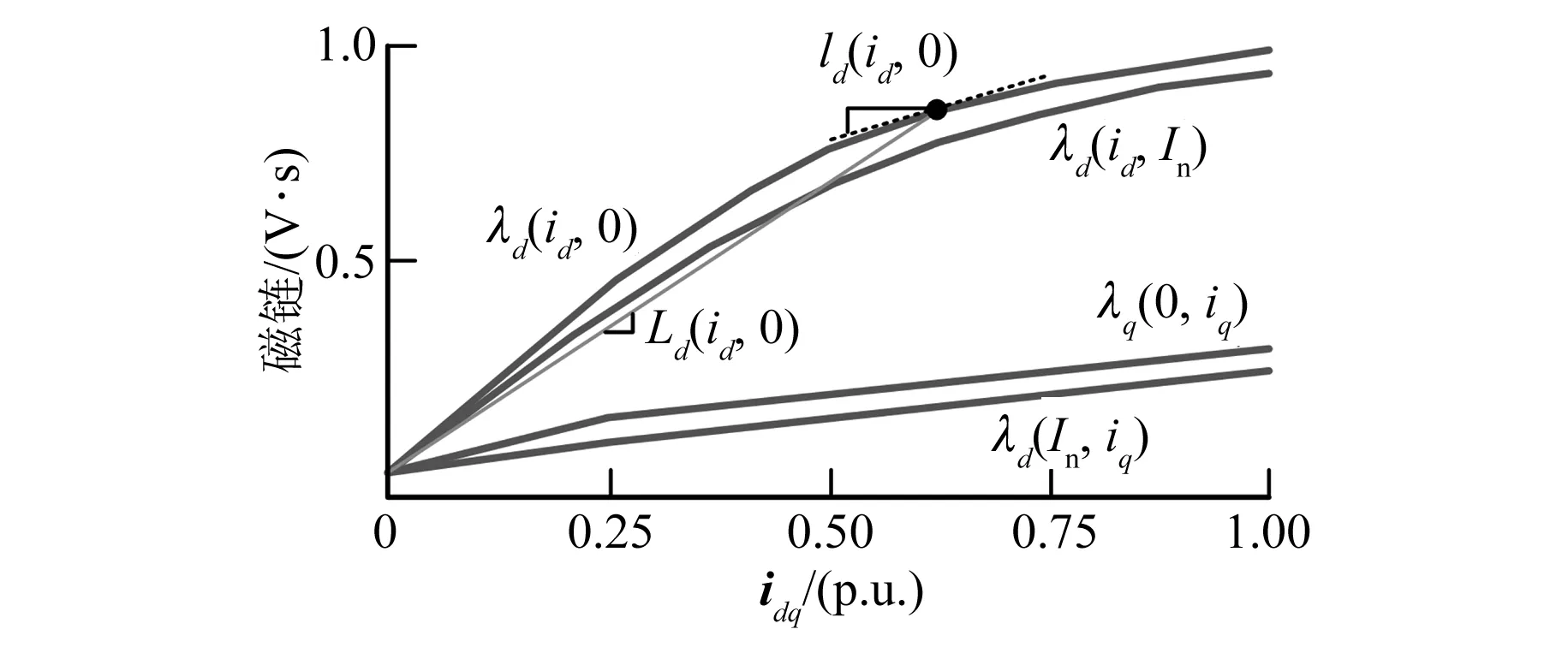
圖2 考慮飽和效應影響的SynRM磁鏈變化規律
假設式(3)中SynRM參數精確,根據前向差分原理,可將電壓矢量uz對應電流變化量預測值表示為
Δiz(k+1)=Ai(k)+Buz(k)
(4)
式中:參數矩陣A和B可由式(3)推導得出,此處不再贅述。
2 DD-MPC電流預測過程
與基于參數模型的FCS-MPC電流變化量計算過程不同,DD-MPC僅考慮電壓矢量對應電流變化量間的輸入輸出關系,不涉及任何SynRM參數。DD-MPC具體實現過程如下。
(1) 在k控制周期起始時刻,根據電壓矢量uk-1作用前后SynRM電流值,求解uz(k-1)對應電流變化量:
Δiz(k)=i(k)-i(k-1)
(5)
式中:i(k)、i(k-1)分別為第k和k-1周期起始時刻電流采樣值。
在完成式(5)計算后,分別將對應的d、q軸電流變化量更新至查找表(LUT),同時反復重復上述LUT更新過程,經多個控制周期后,可構建覆蓋全部7個電壓矢量uz對應電流變化量Δiz的完整LUT。
(2) 根據價值函數J表達式可知,DD-MPC需在每個控制周期完成對7個電壓矢量對應的k+1和k+2時刻電流矢量的預測,即:

(6)

進一步分析式(5)中電流變化量Δiz(k)可知,其可被分解為兩部分,即
Δiz(k)=δi0(k)+δiz(k)
(7)

考慮到式(5)中電流變化量Δiz(k)由SynRM實際運行采樣差值得到,顯然當SynRM運行于不同工作點時,各電壓矢量uz對應的電流變化量Δiz存在差異,圖3中定性地給出了SynRM處于不同轉子位置時uz和Δiz矢量關系圖,其中圖3(a)為θme=0、圖3(b)為θme=π/3。可以看出,不同轉子位置下有效電壓矢量所對應的δiz整體呈橢圓變化趨勢,但矢量幅值和方向均有所差異,即δiz=f(i,z,θme)。同理,零矢量對應電流變化量自然增長量滿足δi0=f(i,ωme)。
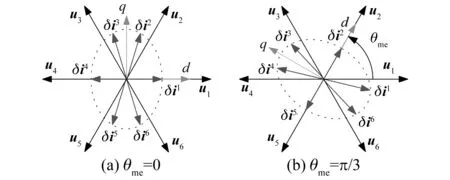
圖3 不同轉子位置時電流變化量矢量關系
3 LUT高更新率實現方法
前文介紹了DD-MPC電流預測過程,其預測精度與電流變化量更新頻率密切相關,但實際系統運行時,不可避免地會出現某個電壓矢量多個控制周期未被選中,引起LUT更新“停滯效應”。為此,下文設計了一種DD-MPC輸入輸出數據關系的高更新率實現方法,利用最近輸出的三電壓矢量對應電流變化信息,推演并更新全局電壓矢量對應電流變化關系。具體包含兩部分:(1)電壓三矢量識別;(2)電流變化量重建。
圖4中給出了DD-MPC查找表高更新率執行流程,下文將對上述兩部分逐一展開介紹。
3.1 電壓三矢量識別
從圖4執行流程中可以看出,在完成k-1控制周期電壓矢量對應電流變化量Δiz(k)計算的基礎上,所提方法并非直接將其更新至LUT中,而是通過選取最近的三矢量,旨在推演出全部電壓矢量對應電流變化量信息,從而實現LUT全局更新。

圖4 DD-MPC查找表高更新率實現流程
3.2 電流變化量重建
假定最近一次更新的電壓矢量uz(t1)中z=1,其最近三電壓矢量序列組合關系如圖5所示,分為以下5種典型方式。
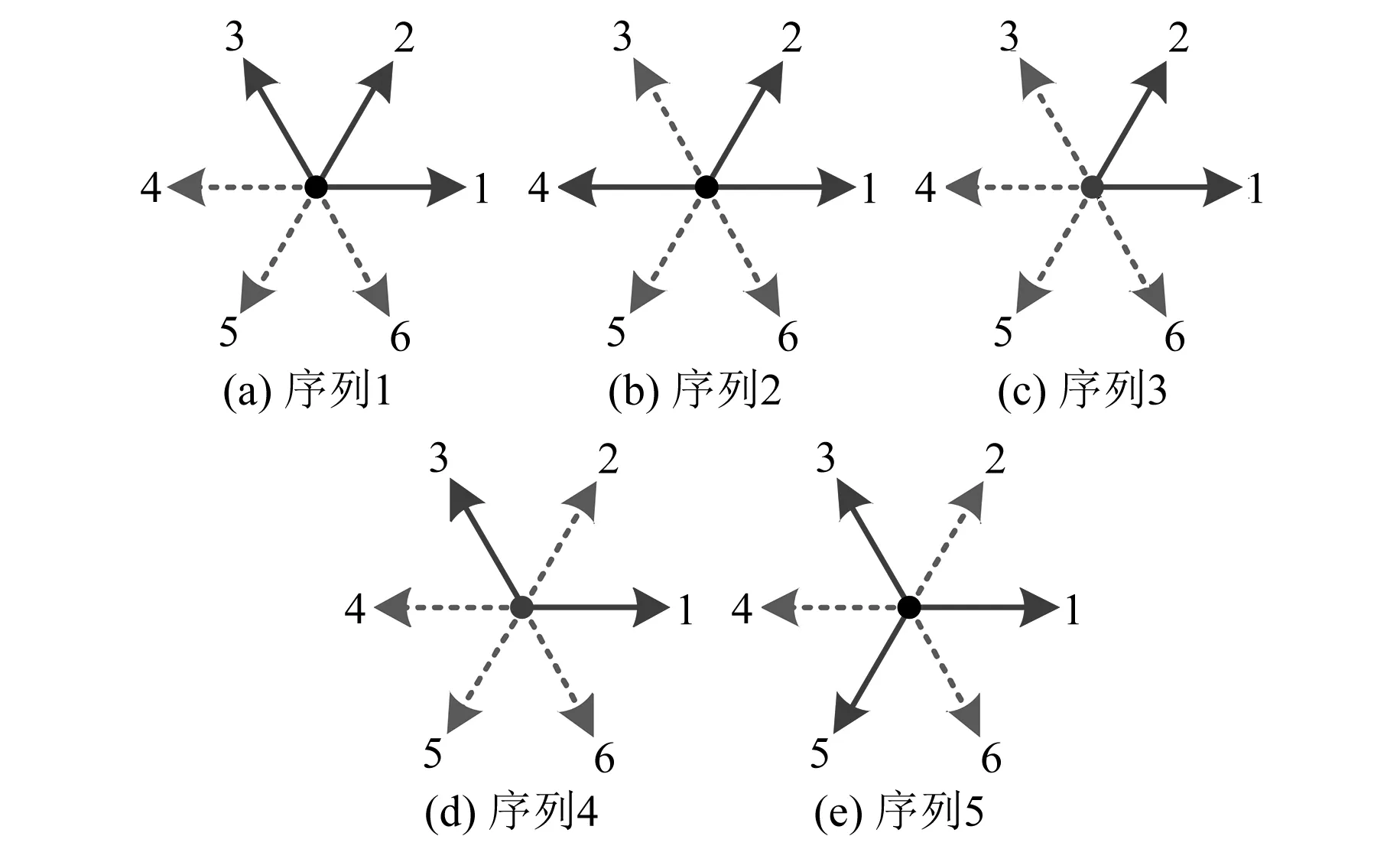
圖5 最近三電壓矢量序列組合關系
(1) 三個連續的有效電壓矢量,如圖5(a),對應電流變化關系為

(8)
(2) 三個有效電壓矢量,其中兩個反向,如圖5(b),對應電流變化關系為
(9)
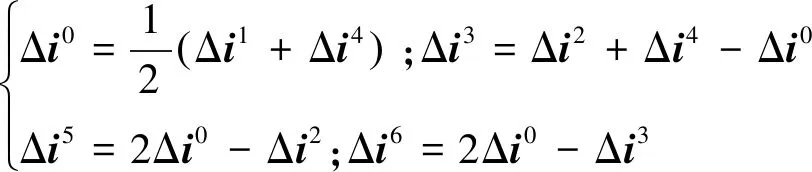
(3) 兩個連續的有效電壓矢量,一個零電壓矢量,如圖5(c),對應電流變化關系為

(10)
(4) 兩個非連續的有效電壓矢量,一個零電壓矢量,如圖5(d),對應電流變化關系為

(11)
(5) 三個非連續的有效電壓矢量,如圖5(e),對應電流變化關系為
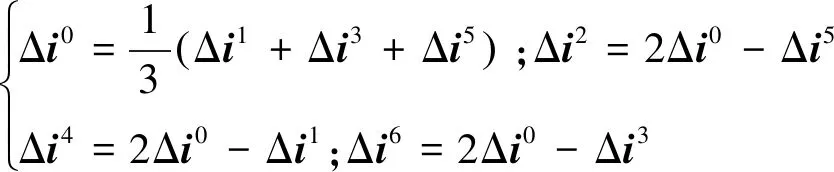
(12)
至此,式(8)~式(12)可完成全局電流變化量計算,從而提高全局電流變化量更新頻率。此外,當最近一次更新的電壓矢量uz(t1),z=2~6時,計算原理與z=1類似,此處不再贅述。
4 試驗驗證與分析
圖6給出了DD-MPC軟硬件系統架構。圖6(a)為控制軟件框圖,包含轉速外環、MTPA運算單元以及DD-MPC,其中DD-MPC在k時刻電流采樣值基礎上,逐一完成三矢量序列識別、變化量重建以及LUT更新,進而實現k+1和k+2時刻電流預測。圖6(b)為測試平臺硬件,參數為,電機極對數4,定子電阻5.2 Ω,d軸等效電感1.2 mH,q軸等效電感0.4 mH,額定電壓380 V,額定電流25 A。
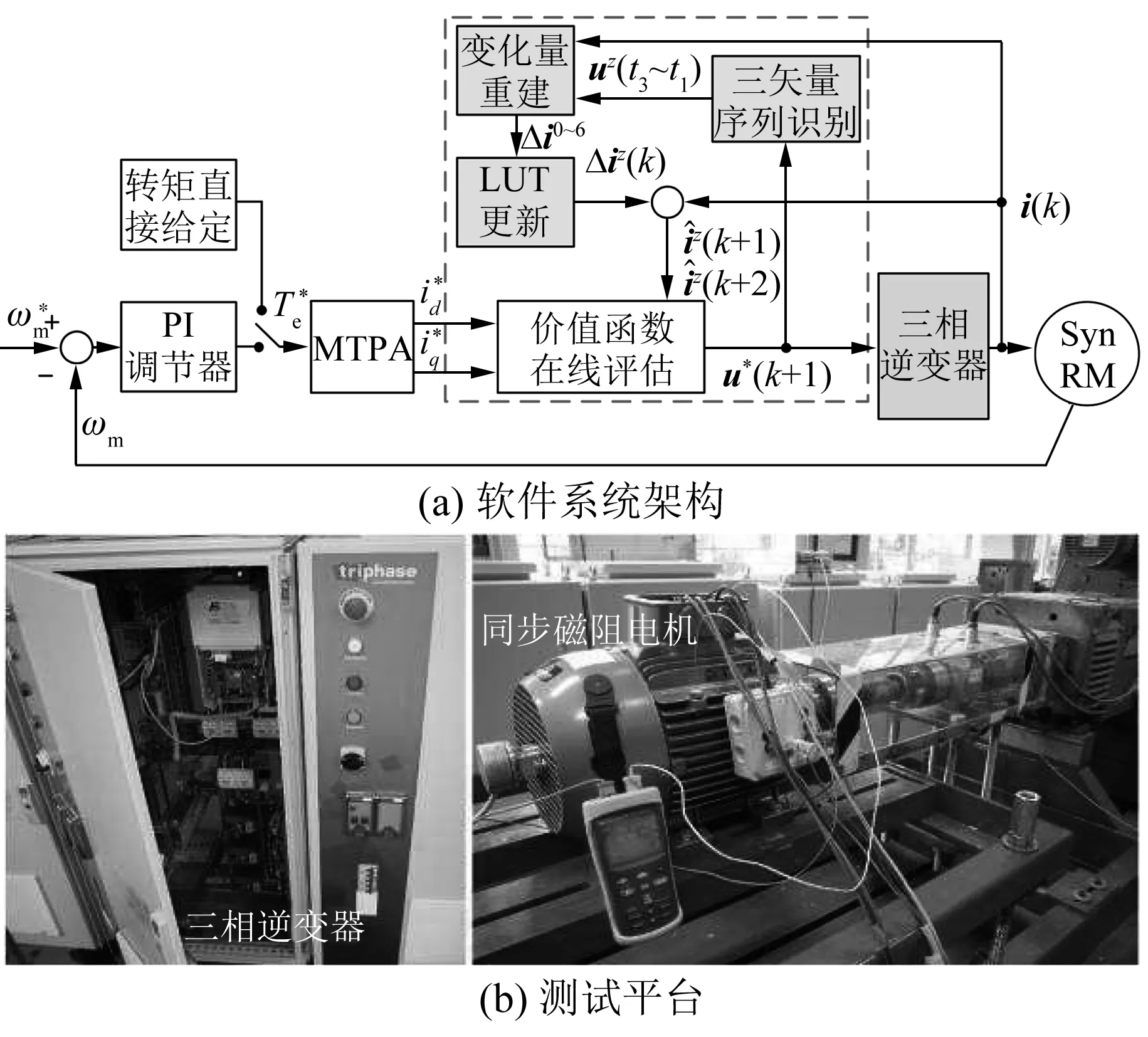
圖6 DD-MPC軟硬件系統架構
首先,進行DD-MPC穩態運行效果測試。圖7給出了FCS-MPC與DD-MPC穩態電流控制效果對比結果,其中0.04 s時刻SynRM調速系統電流預測過程由“參數模型”切換為“數據驅動模型”。FCS-MPC受限于參數失配問題,穩態電流正弦度尚可,但存在較大紋波,而此時DD-MPC由于不依賴任何電機參數,穩態電流品質得到有效改善。此外,若SynRM參數受工作點、環境溫度等因素進一步影響,FCS-MPC對應穩態運行效果將進一步惡化,甚至FCS-MPC系統失穩后無法運行。
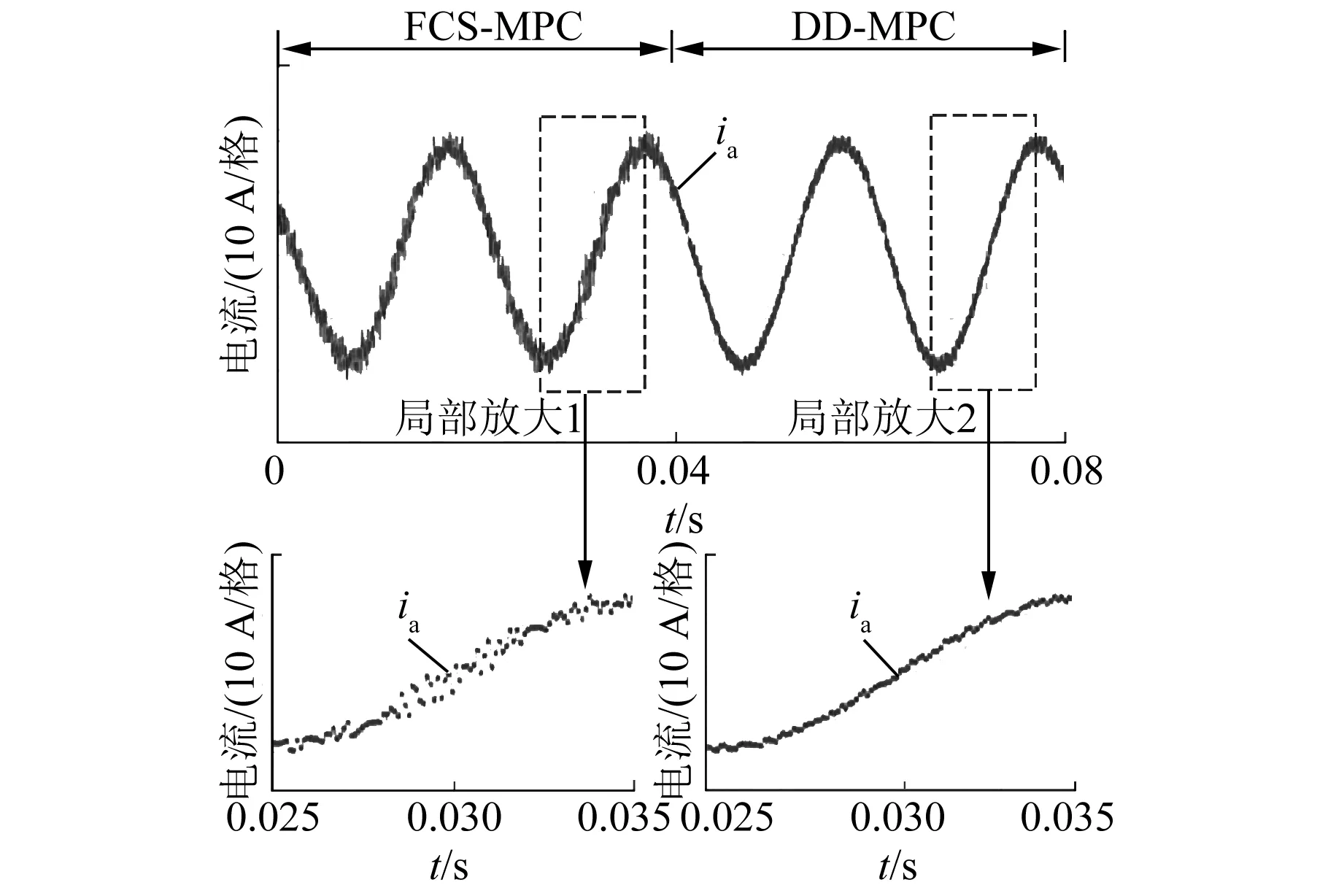
圖7 FCS-MPC與DD-MPC穩態電流控制效果對比結果
其次,進行DD-MPC動態運行效果測試。圖8給出了FCS-MPC和DD-MPC動態電流控制效果對比結果。0~1 s時電機處于額定轉速下輕載運行,1 s時負載突增至重載,可以看出FCS-MPC和DD-MPC均具備快速轉矩響應性能,兩者響應時間均小于5 ms且無動態調制振蕩現象。進一步對比可知,由于DD-MPC直接對SynRM暫態運行過程進行在線建模,其固有的內在自學習特征保證了大擾動情況下系統響應的快速性,具體表現為FCS-MPC和DD-MPC兩者響應時間分別為2.5 ms和1.2 ms,響應性能提升了約1倍,且該特征不隨時變參數變化。
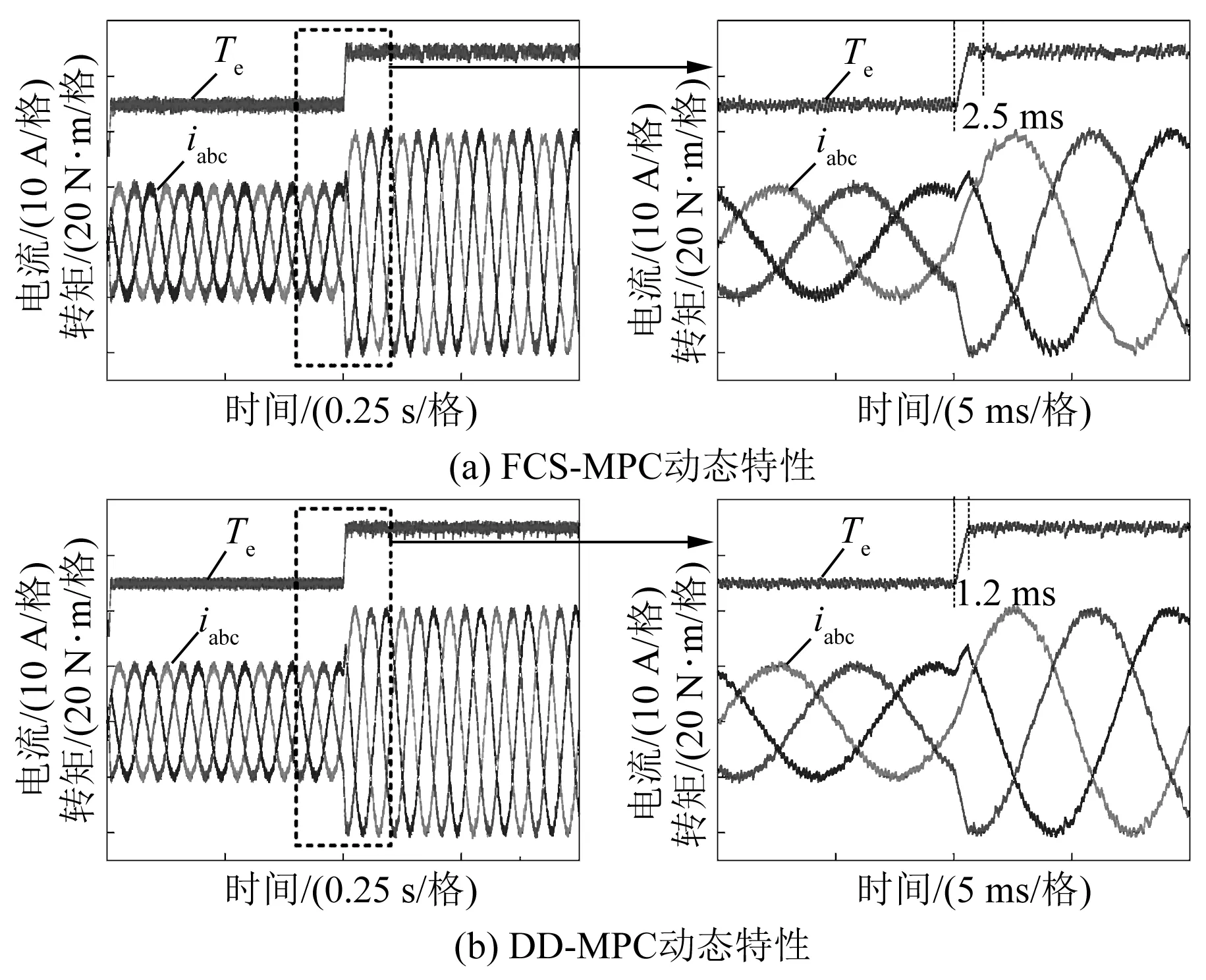
圖8 FCS-MPC與DD-MPC動態電流控制效果對比結果
最后,進行DD-MPC LUT高更新率實現方法有效性論證。圖9給出了有無快速更新機制LUT電流變化量對比結果。圖9(a)中由于DD-MPC未引入快速更新機制,有效電壓矢量對應電流變化量δi1存在多處階躍跳變,說明此時LUT中存儲的電流變化量與前一控制周期實際發生值存在較大預測誤差,零電壓矢量對應電流變化量δi0則較為平滑。圖9(b)中引入快速更新機制后,δi1和δi0均較為平滑,LUT存儲變化量誤差得到有效抑制。
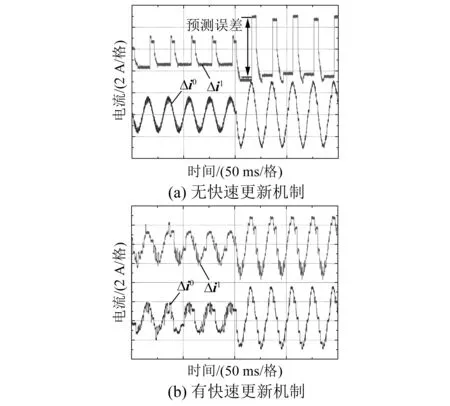
圖9 有無快速更新機制LUT電流變化量對比結果
進一步對SynRM全速域范圍內DD-MPC更新率情況進行統計,對比結果如圖10所示。可以看出,隨著SynRM轉速增加,LUT時間整體呈縮減趨勢,同時在全速域范圍內引入快速更新機制后LUT更新時間均有所提升,從而論證了所提LUT高更新率實現方法的有效性。
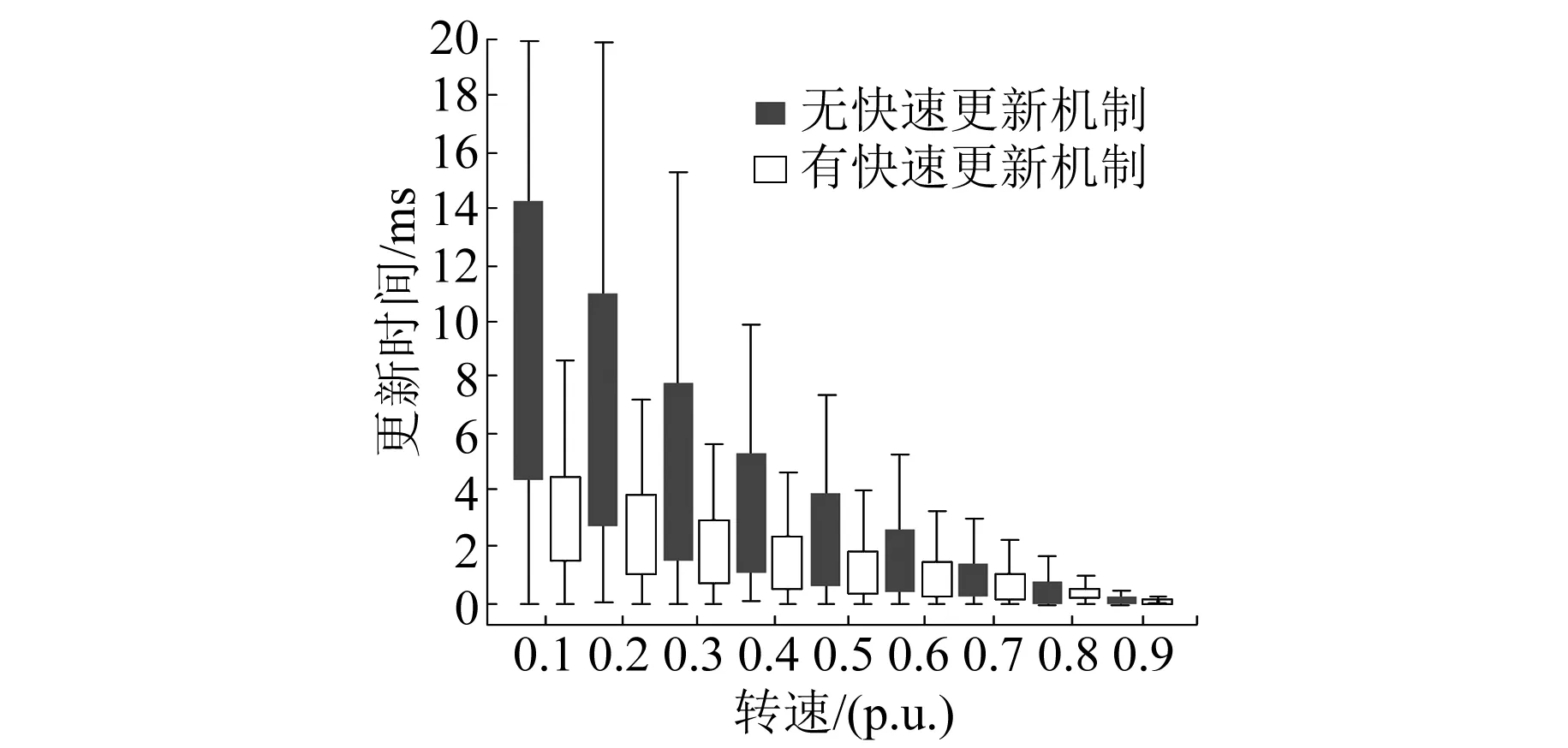
圖10 快速更新機制投入前后統計對比結果
5 結 語
本文針對復雜環境下高效能SynRM參數失配引起的控制系統性能弱化問題,研究了一種數據驅動型模型預測控制方法,并基于25 kW測試樣機對所提方法進行論證與分析,具體結論如下:
(1) DD-MPC采用“數據驅動模型”代替傳統FCS-MPC中的“參數模型”,整個調速過程不依賴任何SynRM參數,表現出較強的魯棒性和穩定性。
(2) 快速更新機制的引入,可有效提升LUT在線更新頻率,提升了DD-MPC在電機調速系統全速域范圍的適用性。
(3) 所提DD-MPC方法僅依賴被控對象的輸入電壓矢量和電流變化量關聯關系,可推廣應用至同類型電力電子系統中。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
