基于人工神經(jīng)網(wǎng)絡(luò)的永磁電機(jī)無(wú)傳感器控制與實(shí)現(xiàn)
2022-09-01 05:50:30黃平林
電機(jī)與控制應(yīng)用 2022年2期
楊 晨, 黃平林, 袁 磊
(江蘇大學(xué) 機(jī)械工程學(xué)院,江蘇 鎮(zhèn)江 212000)
0 引 言
永磁同步電機(jī)(PMSM)因其結(jié)構(gòu)簡(jiǎn)單、可控性高、魯棒性好、效率高和高功率因數(shù)運(yùn)行等諸多優(yōu)點(diǎn)而得到廣泛應(yīng)用[1-3]。
在傳統(tǒng)的磁場(chǎng)定向控制(FOC)中,PMSM轉(zhuǎn)子的位置角度信息由編碼器測(cè)量和反饋。編碼器存在潛在的不準(zhǔn)確性和故障的風(fēng)險(xiǎn),還會(huì)增加控制系統(tǒng)的成本與體積,降低功率密度。因此,采用無(wú)位置傳感器的矢量控制也是該領(lǐng)域內(nèi)的一個(gè)研究熱點(diǎn)。文獻(xiàn)[4]將模型參考自適應(yīng)法(MRAS)用于船舶永磁同步推進(jìn)電機(jī)的電阻與電感參數(shù)在線辨識(shí),使用低通濾波器過濾辨識(shí)電機(jī)參數(shù)后用于更新MRAS的電機(jī)模型。文獻(xiàn)[5]提出了一種使用擴(kuò)展卡爾曼濾波觀測(cè)器(EKF)在線辨識(shí)內(nèi)置式永磁電機(jī)磁鏈參數(shù),同時(shí)使用MRAS估計(jì)轉(zhuǎn)子的轉(zhuǎn)速與位置角的矢量控制策略,降低了位置角的估計(jì)誤差。
無(wú)位置傳感器控制算法需要使用電機(jī)的電氣參數(shù),如d、q軸電感等,構(gòu)建電機(jī)模型參與運(yùn)算。文獻(xiàn)[6]將滑模觀測(cè)器(SMO)與遺傳算法辨識(shí)電機(jī)參數(shù)相結(jié)合,仿真結(jié)果驗(yàn)證了該控制方案具有較好的電機(jī)參數(shù)辨識(shí)能力。文獻(xiàn)[7]使用神經(jīng)網(wǎng)絡(luò)動(dòng)態(tài)調(diào)節(jié)滑模觀測(cè)器的增益,仿真結(jié)果表明提高了滑模控制的穩(wěn)定性。文獻(xiàn)[8]驗(yàn)證了利用RBF神經(jīng)網(wǎng)絡(luò)代替?zhèn)鹘y(tǒng)的滑模觀測(cè)器估算轉(zhuǎn)子位置與轉(zhuǎn)速的有效性。
PMSM的電感參數(shù)在電機(jī)不同工況下容易發(fā)生變化[9-10],因而影響電機(jī)的位置和速度的估計(jì)與控制精度。
本文在對(duì)PMSM電感分析的基礎(chǔ)上,提出了一種人工神經(jīng)網(wǎng)絡(luò)(ANN)參數(shù)辨識(shí)與SMO相結(jié)合的無(wú)位置傳感器矢量控制策略。利用人工神經(jīng)網(wǎng)絡(luò)對(duì)電機(jī)的d、q軸電感參數(shù)進(jìn)行在線辨識(shí),并將參數(shù)輸入滑模觀測(cè)器,對(duì)轉(zhuǎn)子角度進(jìn)行觀測(cè),進(jìn)而實(shí)現(xiàn)電機(jī)的無(wú)位置矢量控制。采用TMS320F28379d DSP作為主控芯片,開發(fā)了電機(jī)控制器,運(yùn)用上述算法,實(shí)現(xiàn)了PMSM的精確控制,驗(yàn)證了上述方法的有效性。
1 永磁電機(jī)電感模型分析
為了研究PMSM的電感特性,本文選取研究的PMSM基本參數(shù)如表1所示。
本文通過建立該電機(jī)的二維有限元仿真模型,如圖1所示,對(duì)電機(jī)不同工況下的電感參數(shù)進(jìn)行仿真計(jì)算,再通過試驗(yàn)進(jìn)行修正,得到d、q軸電感在某一電流下隨相位角變化、某一相位角隨電流變化的波形如圖2所示。
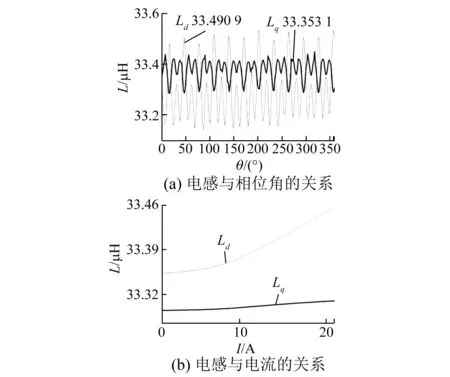
圖2 不同角度和電流下的d、q軸電感
從圖2中可以看出, PMSM的電感參數(shù)Ld與Lq隨著負(fù)載電流的大小和相位變化,且三者之間相互耦合,互相影響,這為PMSM的參數(shù)辨識(shí)增加了困難。
2 電感參數(shù)的神經(jīng)網(wǎng)絡(luò)辨識(shí)
近年來(lái),ANN在參數(shù)辨識(shí)應(yīng)用中得到了廣泛關(guān)注。ANN可以在不需要任何預(yù)定模型的條件下提供參數(shù)的非線性映射,適用于對(duì)電機(jī)電感參數(shù)的辨識(shí)。
本文采用BP ANN算法,利用前文獲得的電機(jī)電感參數(shù)樣本,對(duì)神經(jīng)網(wǎng)絡(luò)進(jìn)行離線訓(xùn)練,得到輸入層、隱含層與輸出層之間相應(yīng)的權(quán)重值與閾值,構(gòu)建的神經(jīng)網(wǎng)絡(luò)模型如圖3所示,神經(jīng)網(wǎng)絡(luò)的輸入變量取PMSM定子電流有效值I和三相電流的相位角θ。網(wǎng)絡(luò)輸出變量為對(duì)應(yīng)的d、q軸電感Ld和Lq。
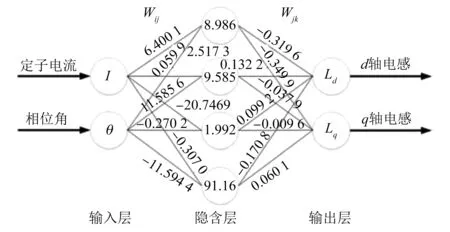
圖3 神經(jīng)網(wǎng)絡(luò)拓?fù)鋱D
為檢驗(yàn)網(wǎng)絡(luò)的準(zhǔn)確性,隨機(jī)抽取100組樣本數(shù)據(jù),輸入網(wǎng)絡(luò),得到如圖4所示的估算電感與樣本電感的擬合圖及其誤差圖。
從圖4中可以看出,當(dāng)樣本電感發(fā)生變化時(shí),估算出來(lái)的電感值可以較好地跟隨樣本電感而相應(yīng)變化,且估算的電感值較好地?cái)M合了樣本電感。估算電感Ld的絕對(duì)誤差范圍在[-0.028 4,0.019 6]內(nèi),相對(duì)誤差不超過0.059%,估算出來(lái)的電感Lq絕對(duì)誤差的絕對(duì)值不超過0.009 4,相對(duì)誤差則小于0.028 2%,兩者辨識(shí)出來(lái)的誤差均相對(duì)較小,說(shuō)明辨識(shí)結(jié)果較為精準(zhǔn),可以將其運(yùn)用到控制程序中,實(shí)現(xiàn)對(duì)復(fù)雜工況下電機(jī)參數(shù)的在線識(shí)別。
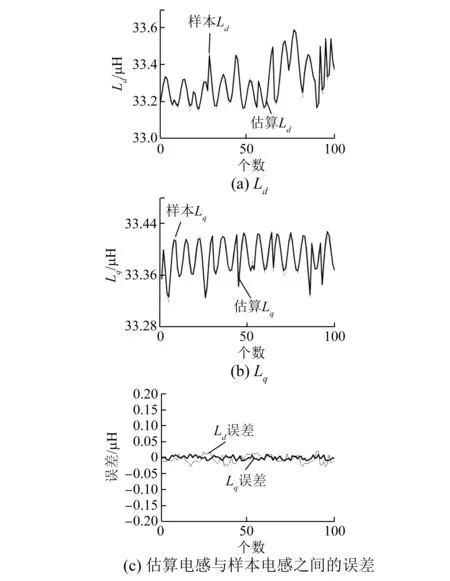
圖4 估算電感與樣本電感圖
3 SMO設(shè)計(jì)
為實(shí)現(xiàn)無(wú)位置傳感器的矢量控制,本文采用SMO對(duì)電機(jī)轉(zhuǎn)子角度進(jìn)行觀測(cè)。
選擇滑模函數(shù)如下:
(1)

滑模面為

(2)
根據(jù)永磁電機(jī)的數(shù)學(xué)模型:

(3)
式中:iα和iβ為α、β軸定子電流;Vα和Vβ為α、β軸電壓矢量;eα和eβ為α、β軸反電動(dòng)勢(shì)。
給出滑模觀測(cè)器的狀態(tài)空間方程為
(4)
式中:k為常數(shù)增益;sgn為切換函數(shù)。
而
(5)
這里令:
(6)
而:
(7)
將式(6)、式(7)對(duì)比可得:
(8)

而反電動(dòng)勢(shì)與轉(zhuǎn)子磁鏈、位置角的關(guān)系如下:
(9)
式中:ψf為轉(zhuǎn)子磁鏈;ωr為轉(zhuǎn)子角速度。
于是有:
(10)
式中:Δθr為初始的轉(zhuǎn)子位置角。
(11)
根據(jù)上述的分析,得到SMO的結(jié)構(gòu)框圖如圖5所示。
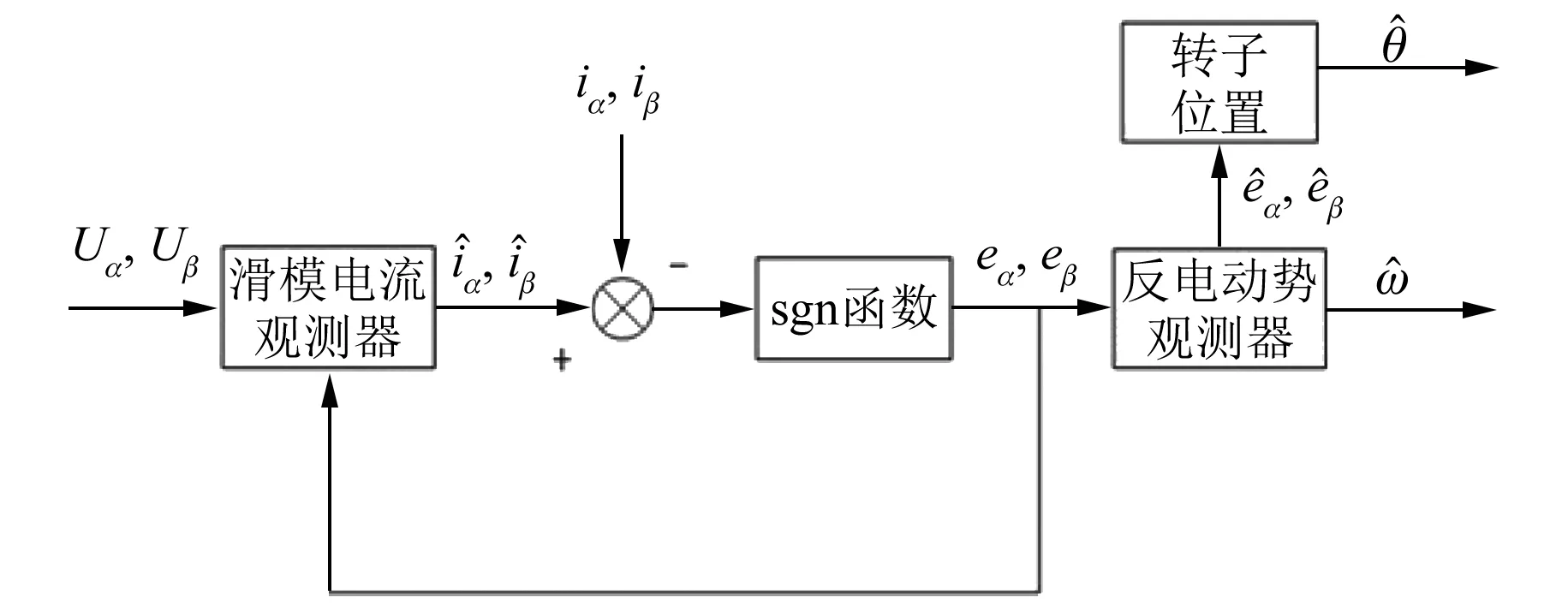
圖5 SMO結(jié)構(gòu)框圖
4 DSP控制實(shí)現(xiàn)與驗(yàn)證
為實(shí)現(xiàn)上述控制策略,選用TI公司TMS320F28379d型號(hào)的DSP作為主控芯片,開發(fā)了控制電路。TMS320F28379d是一款功能強(qiáng)大的32位浮點(diǎn)MCU,具有雙核構(gòu)架,每個(gè)內(nèi)核可提供200 MHz的信號(hào)處理功能,能滿足在線神經(jīng)網(wǎng)絡(luò)辨識(shí)和滑模運(yùn)算的需求。根據(jù)控制策略,編寫基于SMO的SVPWM無(wú)位置傳感器矢量控制程序,程序框圖如圖6所示。完整的電機(jī)控制測(cè)試系統(tǒng)如圖7所示。
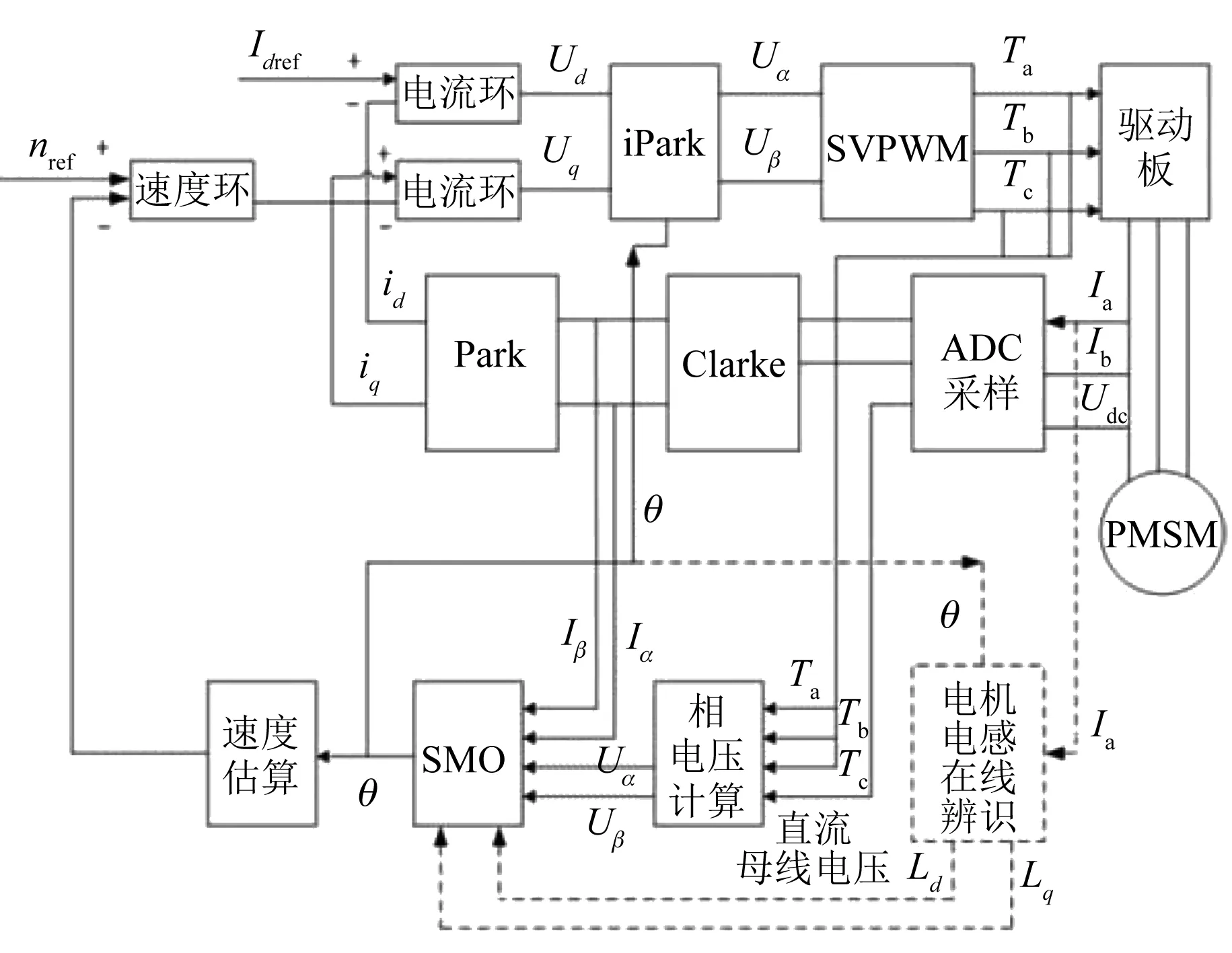
圖6 控制程序框圖
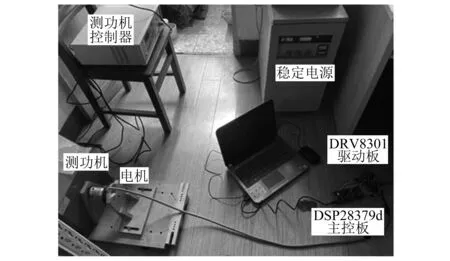
圖7 電機(jī)控制測(cè)試系統(tǒng)實(shí)物圖
在控制程序中,神經(jīng)網(wǎng)絡(luò)根據(jù)輸入的滑模觀測(cè)角與采樣得到的相電流實(shí)時(shí)在線辨識(shí)電機(jī)的電感Ld和Lq,而得到的Ld和Lq參與滑模觀測(cè)器的運(yùn)算來(lái)得到估算的位置角與電機(jī)轉(zhuǎn)速完成矢量控制程序的閉環(huán)運(yùn)算。
試驗(yàn)中,將離線訓(xùn)練好的神經(jīng)網(wǎng)絡(luò)程序加入到控制程序中,進(jìn)行參數(shù)辨識(shí)。當(dāng)給定PWM頻率為5 kHz,即神經(jīng)網(wǎng)絡(luò)每隔0.2 ms辨識(shí)一次電感參數(shù),SMO部分的電感參數(shù)每隔0.2 ms更新一次電感參數(shù)完成位置估計(jì)的運(yùn)算。
在電機(jī)的運(yùn)行過程中,隨著電機(jī)位置角度的變化,估算的d、q軸電感值也隨之變化,如圖8所示,SMO的電感參數(shù)也隨之更新用于SMO的運(yùn)算,該控制策略具有較好的實(shí)時(shí)性。
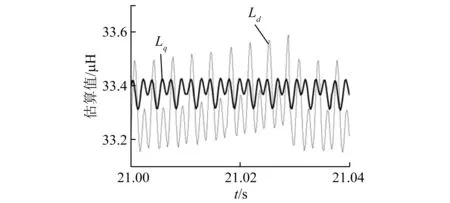
圖8 電機(jī)相電流為2 A時(shí)程序估算的d、q軸電感
在電機(jī)相電流為2 A時(shí),在線辨識(shí)運(yùn)行得到的d軸估計(jì)電感的平均值Ld=33.529 mH,q軸估計(jì)電感的平均值Lq=33.377 mH。而仿真計(jì)算的平均數(shù)據(jù)為L(zhǎng)d=33.409 mH,Lq=33.334 mH。試驗(yàn)結(jié)果與經(jīng)過仿真計(jì)算得到的數(shù)據(jù)Ld相對(duì)誤差約為0.36%,Lq相對(duì)誤差約為0.13%,辨識(shí)結(jié)果較為準(zhǔn)確。
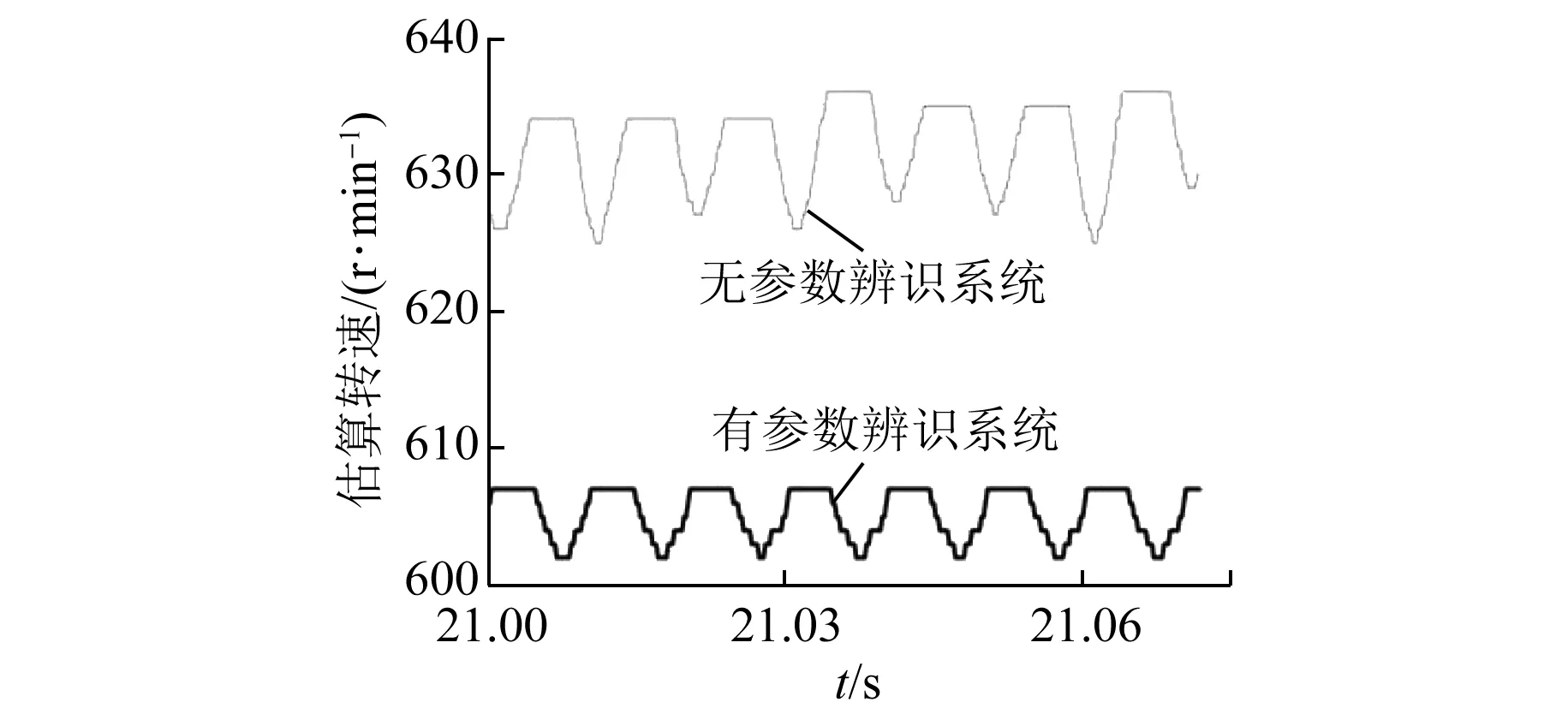
圖9 600 r/min估算轉(zhuǎn)速比較
圖9為電機(jī)處于閉環(huán)時(shí)的轉(zhuǎn)速,可以看出,當(dāng)給定轉(zhuǎn)速為600 r/min時(shí),帶參數(shù)辨識(shí)系統(tǒng)時(shí)的轉(zhuǎn)速在600 r/min左右,轉(zhuǎn)速誤差在2~7 r/min左右,轉(zhuǎn)速平穩(wěn)。而無(wú)參數(shù)辨識(shí)系統(tǒng)時(shí)的轉(zhuǎn)速在620 r/min左右,而且誤差大概在25~36 r/min左右,轉(zhuǎn)速波動(dòng)較大。
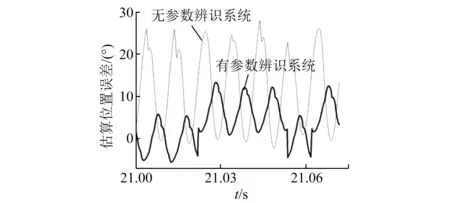
圖10 600 r/min轉(zhuǎn)子位置估算誤差角度比較
圖10為轉(zhuǎn)速閉環(huán)控制時(shí)滑模觀測(cè)器估算的轉(zhuǎn)子位置誤差的比較,從圖10中可以看出,有參數(shù)辨識(shí)系統(tǒng)估算出來(lái)的位置誤差在-5°~13°之間,相對(duì)誤差較小,而無(wú)參數(shù)辨識(shí)系統(tǒng)的位置誤差最大值達(dá)到了27°,遠(yuǎn)大于有參數(shù)辨識(shí)系統(tǒng)的誤差,且誤差的波動(dòng)較大。
在電機(jī)的負(fù)載試驗(yàn)過程中,電機(jī)同樣設(shè)定轉(zhuǎn)速為600 r/min,分別施加0.06、0.07和0.08 N·m的負(fù)載轉(zhuǎn)矩,測(cè)得電源輸出電流數(shù)值如表2所示。
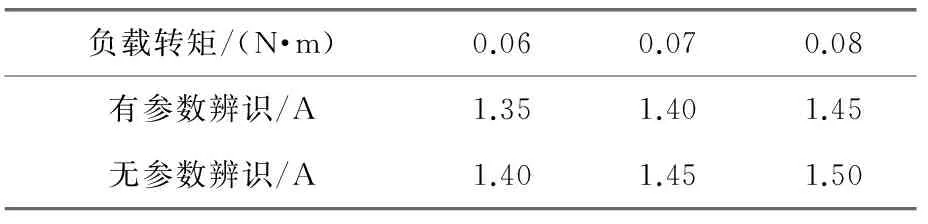
表2 電機(jī)負(fù)載試驗(yàn)電流數(shù)值
從表2中可以看出,在同一負(fù)載下,有參數(shù)辨識(shí)系統(tǒng)的電流值比無(wú)辨識(shí)小0.05 A左右,帶參數(shù)辨識(shí)系統(tǒng)的矢量控制表現(xiàn)出更高的電流利用率,說(shuō)明該控制策略具有更高的效率。
試驗(yàn)表明,基于神經(jīng)網(wǎng)絡(luò)參數(shù)辨識(shí)的滑模觀測(cè)方法,在無(wú)傳感器矢量控制中表現(xiàn)出了較好的實(shí)時(shí)性和控制精度,為電機(jī)的精確控制提供了思路。
5 結(jié) 語(yǔ)
(1) 本文采用ANN算法辨識(shí)永磁電機(jī)電感,通過對(duì)神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,實(shí)現(xiàn)了對(duì)不同工況下電機(jī)電感的準(zhǔn)確識(shí)別。
(2) 將ANN參數(shù)辨識(shí)與SMO相結(jié)合,實(shí)現(xiàn)了永磁電機(jī)轉(zhuǎn)子位置的準(zhǔn)確識(shí)別,進(jìn)而應(yīng)用于永磁電機(jī)的無(wú)傳感器矢量控制中。
(3) 應(yīng)用功能強(qiáng)大的DSP芯片TMS320F28379d,開發(fā)了基于ANN和SMO的永磁電機(jī)無(wú)位置傳感器矢量控制器,試驗(yàn)結(jié)果表明該控制器具有良好的位置估計(jì)能力,以及更高的控制精度和效率。

- 電機(jī)與控制應(yīng)用的其它文章
- 基于層次分析法的電機(jī)系統(tǒng)能效評(píng)估方法研究與應(yīng)用*
- 基于CNN和LSTM混合網(wǎng)絡(luò)的電動(dòng)汽車充電樁運(yùn)行狀態(tài)預(yù)測(cè)方法*
- 計(jì)及溫度變化的潛油直線電機(jī)結(jié)構(gòu)優(yōu)化*
- 低轉(zhuǎn)矩脈動(dòng)低速大轉(zhuǎn)矩電主軸感應(yīng)電機(jī)的設(shè)計(jì)與分析*
- 基于81電平鐵路功率調(diào)節(jié)器的不平衡補(bǔ)償策略*
- 單相感應(yīng)電機(jī)無(wú)速度傳感器矢量控制系統(tǒng)