交流側(cè)不對稱故障下柔性直流輸電系統(tǒng)優(yōu)化控制研究
2022-09-02 04:22:44夏向陽易海淦夏天石超賀燁丹劉代飛鄧文華王燦
湖南大學學報(自然科學版) 2022年8期
關(guān)鍵詞:交流
夏向陽,易海淦,夏天,,石超,賀燁丹,劉代飛,鄧文華,王燦
(1.長沙理工大學電氣與信息工程學院,湖南 長沙 410114;2.長沙理工大學能源與動力工程學院,湖南 長沙 410114;3.湖南長高高壓開關(guān)有限公司,湖南長沙 410001)
我國資源與負荷地域分配嚴重不均的特點,決定了必須采用遠距離、大容量跨區(qū)域高壓輸電的方式來輸送電能[1-3].其中柔性直流輸電系統(tǒng)是當下跨區(qū)域大容量高壓直流輸電的首選方式[4-5].
在柔性直流輸電系統(tǒng)中,交流電網(wǎng)電壓不對稱會使得MMC 換流器交流側(cè)電流不平衡[6-8],環(huán)流中出現(xiàn)零序分量,直流側(cè)產(chǎn)生功率振蕩等問題.電網(wǎng)電壓對稱時MMC 的控制策略采用的是和兩電平VSC一樣的矢量控制策略,但該策略無法控制負序電流[9-10].尤其是在不平衡網(wǎng)壓下,交流電壓沒有實現(xiàn)正負序分離,電壓中的基頻負序分量中含有二倍頻的交流量,導(dǎo)致鎖相環(huán)的提取精度降低.
文獻[11]將有限狀態(tài)分層模型預(yù)測控制引入到MMC 控制中,解決了權(quán)重因子設(shè)計問題,但環(huán)流問題沒有得到解決.文獻[12]提出了一種電網(wǎng)電壓不平衡下MMC 的無源控制策略,該策略能夠很好地實現(xiàn)交流側(cè)的控制目標.文獻[13]提出了一種無差拍直接功率控制策略,但有功的二倍頻波動沒有得到完全抑制.文獻[14]設(shè)計了基于比例諧振調(diào)節(jié)器和瞬時功率理論的控制策略,但會明顯降低其響應(yīng)速度.文獻[15]分別對交流側(cè)電流、橋臂環(huán)流和直流電流進行解耦控制,針對系統(tǒng)暫態(tài)性能進行了提升.文獻[16]提出了一種綜合控制策略,能實現(xiàn)交流側(cè)電流對稱,并且引入零序電流抑制器,消除零序分量對直流側(cè)的影響.上述策略都沒有考慮不平衡網(wǎng)壓下環(huán)流抑制精度和相應(yīng)速度之間的平衡,這也是目前不平衡網(wǎng)壓下研究待解決的問題.
針對以上不足,為提高MMC 在復(fù)雜工況下的故障穿越能力,本文提出一種在網(wǎng)壓不對稱工況下MMC-HVDC 的優(yōu)化控制策略.設(shè)計基于雙二階廣義積分器鎖相環(huán)在不對稱工況下獲取電壓的相位和頻率信息,保證電壓電流正負序dq軸分量的準確提取,提升了交流側(cè)電流控制的精度,配合雙矢量控制器實現(xiàn)三相電流平衡;利用由PI 控制器和重復(fù)控制器串聯(lián)組成的嵌入式重復(fù)控制器,在無靜差跟蹤環(huán)流直流分量參考指令的同時,能有效抑制環(huán)流中的二倍頻正負零序分量,優(yōu)化系統(tǒng)性能,提升故障穿越能力,并在仿真軟件MATLAB∕Simulink 中搭建MMCHVDC系統(tǒng)仿真模型,驗證了所提優(yōu)化控制策略的有效性.
1 MMC 拓撲結(jié)構(gòu)和工作原理
為了簡化數(shù)學建模的過程,忽略電力電子器件的驅(qū)動延時和死區(qū)時間,認為所有子模塊結(jié)構(gòu)一致,根據(jù)仿真速度最快的平均值模型進行數(shù)學建模.MMC橋臂簡化平均值模型如圖1所示[17].
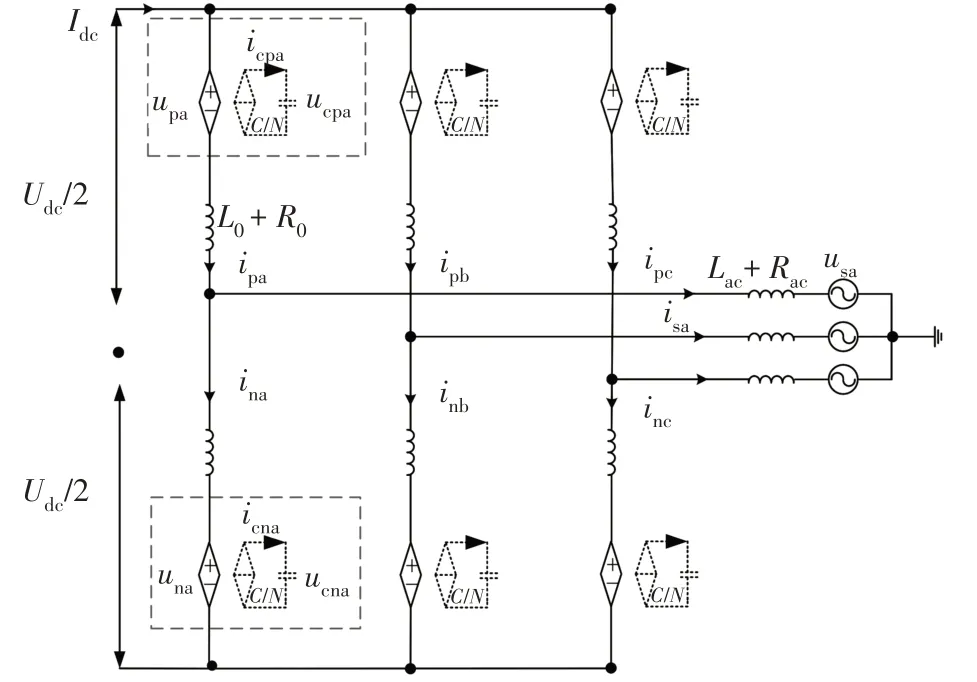
圖1 MMC橋臂簡化平均值模型Fig.1 Simplified average model of MMC bridge arm
圖1 中,橋臂所有子模塊的等效電容值為C∕N;L0+R0為橋臂電感和損耗等效電阻串聯(lián);電感Lac和電阻Rac為交流電網(wǎng)阻抗;icpj、icnj分別為上橋臂和下橋臂中流過子模塊電容的電流;upj、unj分別為上橋臂和下橋臂級聯(lián)子模塊經(jīng)調(diào)制后輸出的電壓;ucpj、ucnj分別為上橋臂和下橋臂N個級聯(lián)子模塊電容電壓等效為理想變換器產(chǎn)生的可控電源;ipj、inj分別為上橋臂和下橋臂流過的電流;Udc為直流母線電壓;Idc為直流側(cè)電流;usj、isj分別為交流側(cè)各相電壓和電流;j=a、b、c.
根據(jù)基爾霍夫定律,可得MMC 基本單元的時域動態(tài)數(shù)學方程為:
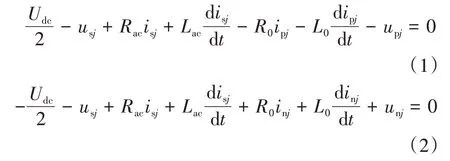
將式(1)與式(2)相加,進行化簡整理可得:

式中:R=Rac+0.5R0;L=Lac+0.5L0;ej=0.5(unj-upj).
將式(1)與式(2)相減,可得:

定義橋臂環(huán)流idiffj和橋臂共模電壓ucomj的表達式分別為:

聯(lián)立式(3)~式(6),可得環(huán)流在橋臂阻抗上的不平衡壓降udiffj為:

式(7)的右邊部分就是MMC 直流回路的數(shù)學模型,描述了MMC內(nèi)部的電壓電流特性.
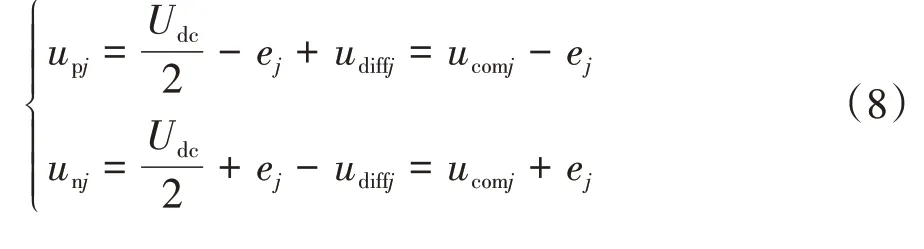
上橋臂和下橋臂的電壓也可以分別用兩種形式表示:
2 不對稱工況下MMC運行特性分析
2.1 MMC交流側(cè)功率波動分析
電網(wǎng)電壓不對稱會使得三相電流不平衡,有功功率和無功功率產(chǎn)生不可控振蕩,而在電網(wǎng)發(fā)生不對稱故障時,情況會更加嚴重.
本文以交流電網(wǎng)發(fā)生單相接地故障為例,對MMC 交流側(cè)的功率特性進行分析.MMC-HVDC 系統(tǒng)單線結(jié)構(gòu)如圖2 所示.圖2 中,MMC 換流站經(jīng)聯(lián)結(jié)變壓器接入交流電網(wǎng),聯(lián)結(jié)變壓器采用Yg∕△接線方式,在PCC 點發(fā)生單相接地故障時,MMC 的閥側(cè)電壓電流中不存在零序分量.
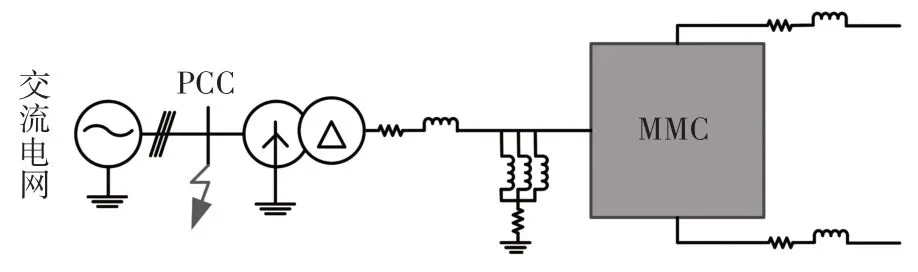
圖2 MMC-HVDC系統(tǒng)單線結(jié)構(gòu)Fig.2 Single line structure of MMC-HVDC system
根據(jù)對稱分量法,閥側(cè)的j相交流電壓和電流可以正負序分解為:
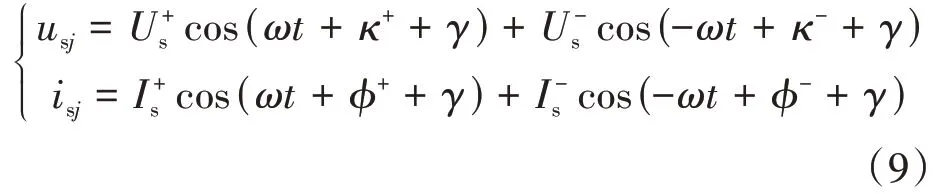
對式(9)進行旋轉(zhuǎn)坐標變換,得到dq坐標系下閥側(cè)電壓和電流的表達式分別為:
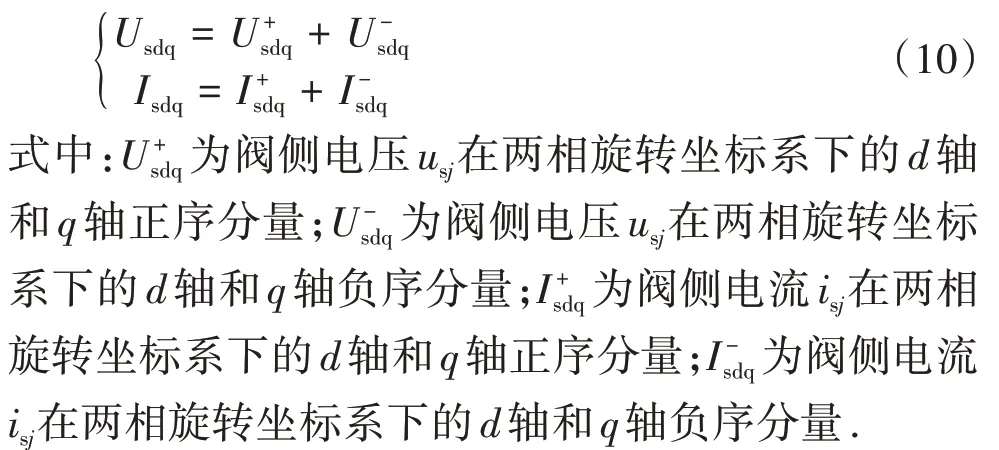
根據(jù)瞬時功率理論,可得兩相旋轉(zhuǎn)坐標系下MMC交流側(cè)的瞬時復(fù)功率為[12]:
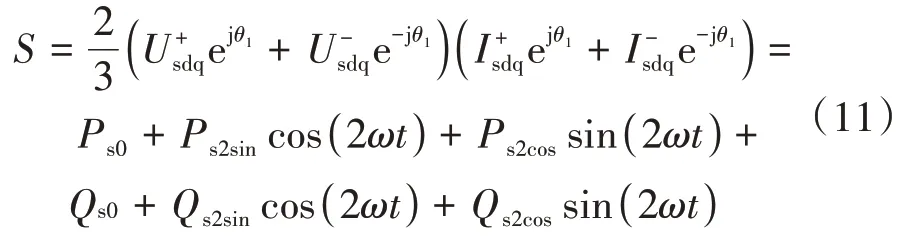
式中:S為復(fù)功率;θ1為d軸和兩相靜止坐標系下α軸之間的夾角,且a軸與α軸位置重合;Ps0、Qs0分別為交流側(cè)有功功率和無功功率的直流分量幅值;Ps2sin、Ps2cos、Qs2sin、Qs2cos分別為有功功率和無功功率中對應(yīng)的二倍頻分量幅值.
在不對稱電網(wǎng)電壓下,交流側(cè)電流的控制目標可分為抑制負序電流、抑制有功功率脈動、抑制無功功率脈動.不同的控制目標根據(jù)式(12)可計算得到不同的內(nèi)環(huán)輸出電流控制參考值.
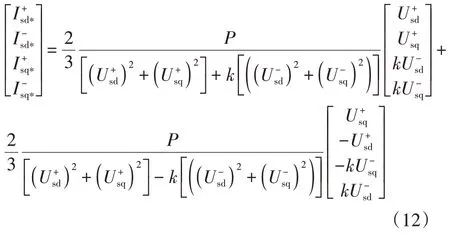
式中:k=0、1、-1.當k=0 時,交流側(cè)電流控制目標為抑制負序電流,實現(xiàn)三相電流平衡;當k=-1 時,交流側(cè)電流控制目標為抑制有功功率脈動;當k=1 時,交流側(cè)電流控制目標為抑制無功功率脈動.
由于電壓及電流負序分量的出現(xiàn),會使得橋臂子模塊電容電壓存在較大波動,甚至引起短路電流過大導(dǎo)致功率器件電流超限,此時若不進行故障穿越控制,會嚴重影響換流器的正常運行甚至系統(tǒng)停運.為確保系統(tǒng)過電流不會危及電力電子器件安全,本文將交流側(cè)電流的控制目標選擇為抑制負序電流.
2.2 MMC橋臂環(huán)流分析
在正常工況下,MMC 橋臂環(huán)流中的二倍頻交流分量呈現(xiàn)的是負序性質(zhì).而當交流側(cè)發(fā)生不對稱故障時,交流側(cè)三相電流的不平衡,使得三相橋臂分配的有功功率不一致,從而使環(huán)流的成分更加復(fù)雜.因此,需要對環(huán)流的成分進行具體的分析以便設(shè)計合適的環(huán)流抑制策略.
在網(wǎng)壓不平衡情況下,MMC 的內(nèi)部電動勢ej可以正負序分解為:

式中:E+、E-分別為內(nèi)部電動勢正負序分量的幅值;θ+、θ-分別為內(nèi)部電動勢正負序分量的相位.
由文獻[18]可知,在網(wǎng)壓不對稱工況下,三相橋臂環(huán)流中的直流分量不一定相等.本文以a 相橋臂為例,簡單介紹環(huán)流參考值的計算過程.
忽略橋臂阻抗損耗,根據(jù)瞬時功率理論可得a相上橋臂和下橋臂功率之和Pa為:

Pa中的直流功率分量Pa0可以表示為:
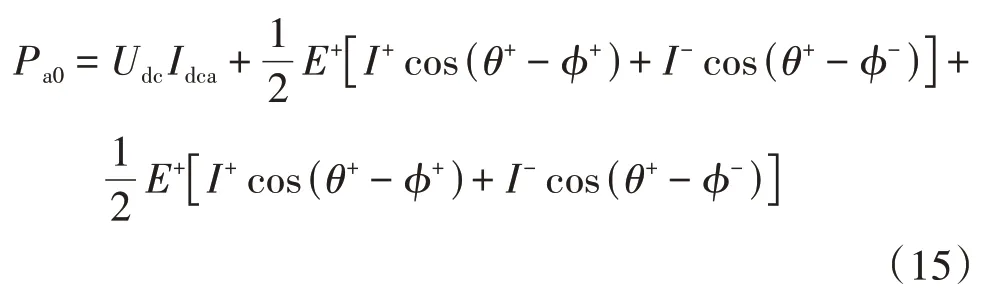
假設(shè)各相橋臂能量已經(jīng)平衡,如果此時橋臂功率中直流分量Pa0幅值不為0,那么子模塊平均電容電壓將處于變化的狀態(tài),不利于系統(tǒng)的穩(wěn)定運行.因此,需要令橋臂功率中的直流分量Pa0為零,從而解出橋臂各相環(huán)流直流分量的表達式如下所示[19]:
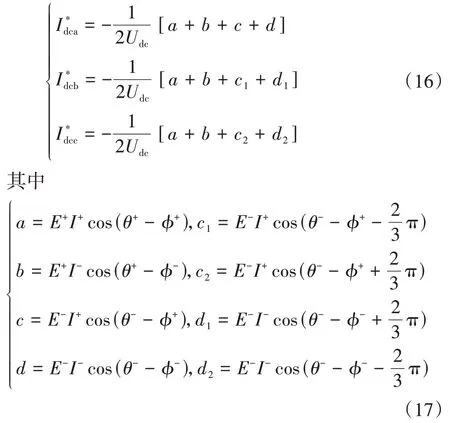
在網(wǎng)壓不對稱工況下,環(huán)流控制的目的依然是抑制環(huán)流中除直流分量外的偶次諧波分量.因此,計算得到的環(huán)流直流分量值就可以當作是橋臂環(huán)流的參考值.
橋臂環(huán)流的參考值中包含了交流側(cè)電壓、電流的正序和負序分量,當電壓電流的負序分量都為0時,各相環(huán)流的直流分量參考值都相等;但當交流側(cè)選擇的控制目標為抑制電流中的負序分量時,負序電壓的存在會使得三相橋臂環(huán)流中的直流分量不相等.同時,由于環(huán)流的參考值中不包含交流分量,因而只要環(huán)流控制器能夠無靜差跟蹤環(huán)流直流參考指令,便能實現(xiàn)對環(huán)流中二倍頻正負序零分量的有效抑制.
3 不對稱工況下MMC-HVDC 系統(tǒng)控制策略
在不對稱工況下,MMC-HVDC 控制系統(tǒng)首先需要抑制交流側(cè)的負序電流,以降低其對MMC 運行的影響.此外,由于MMC 內(nèi)部的二倍頻零序環(huán)流分量會流入到直流側(cè)中引起有功功率的振蕩,也需要將其抑制.因而后文控制策略的設(shè)計主要圍繞這兩者展開.
3.1 基于雙二階廣義積分器的鎖相環(huán)設(shè)計
交流側(cè)電流控制策略采用文獻[7]所述的dq軸坐標系下的內(nèi)環(huán)雙序交流側(cè)電流控制器.考慮到該控制器的結(jié)構(gòu)比較成熟,限于篇幅,本文主要介紹利用DSOGI-PLL 提取電壓電流正負序dq軸分量的過程.
在電網(wǎng)電壓對稱的情況下,MMC 控制系統(tǒng)采用的是基于同步坐標系的鎖相環(huán)(Single Synchronous Reference Frame Software-Phase Locked Loop,SSRFPLL).當電網(wǎng)電壓不對稱時,交流電壓沒有實現(xiàn)正負序分離,電壓中的基頻負序分量經(jīng)派克變換后變?yōu)槎额l的交流量,SSRF-PLL中的PI控制器無法對交流量實現(xiàn)無靜差跟蹤,導(dǎo)致鎖相環(huán)的精度會受到較大的影響.
為了獲取用于坐標變換的不對稱電網(wǎng)電壓下精確的電壓相位信息和頻率信息,本文設(shè)計了DSOGIPLL,可以通過二階廣義積分器(Second Order Generalized Integrator,SOGI)產(chǎn)生正交信號濾除諧波,并在電網(wǎng)電壓不對稱的情況下,實現(xiàn)對基波電正負序分量的精確提取.其中SOGI的結(jié)構(gòu)如圖3所示.
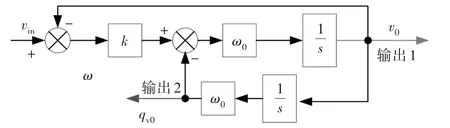
圖3 二階廣義積分器Fig.3 Second order generalized integrator
圖3中,vin為輸入信號;v0和qv0分別為輸出信號1和2;ω0為諧振頻率;k為增益.
輸出信號與輸入信號間的傳遞函數(shù)可以表示為:
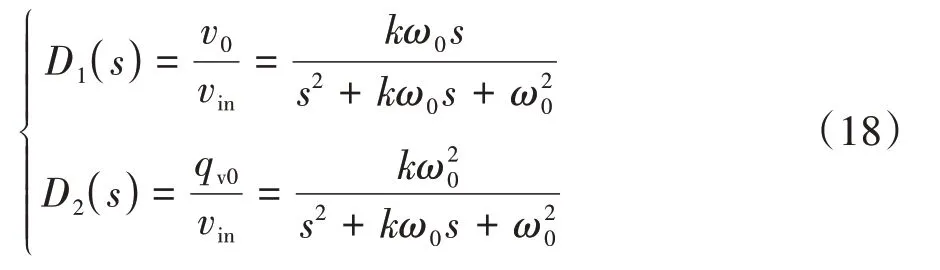
在SOGI 中,v0和qv0能夠輸出與vin同頻率的交流信號,并且qv0的相位總滯后v090°.當SOGI 的諧振頻率設(shè)置為電網(wǎng)基波頻率時,輸入信號中含有的諧波成分都能被有效濾除,實現(xiàn)輸出信號對輸入基波信號的無靜差跟蹤.根據(jù)SOGI 輸入輸出的傳遞函數(shù),繪出不同增益k下的伯德圖,如圖4 所示.由圖4 可知,兩個輸出信號都對除基頻分量外的諧波有較高的衰減,并且參數(shù)k的取值越小,濾波效果越好.圖5 為不同k值下輸出信號1 的階躍響應(yīng)曲線,由圖5 可知,k值越小,動態(tài)響應(yīng)速度越慢.所以在SOGI 的設(shè)計過程中,一般采取折中的方法選取k值,本文取1.414.
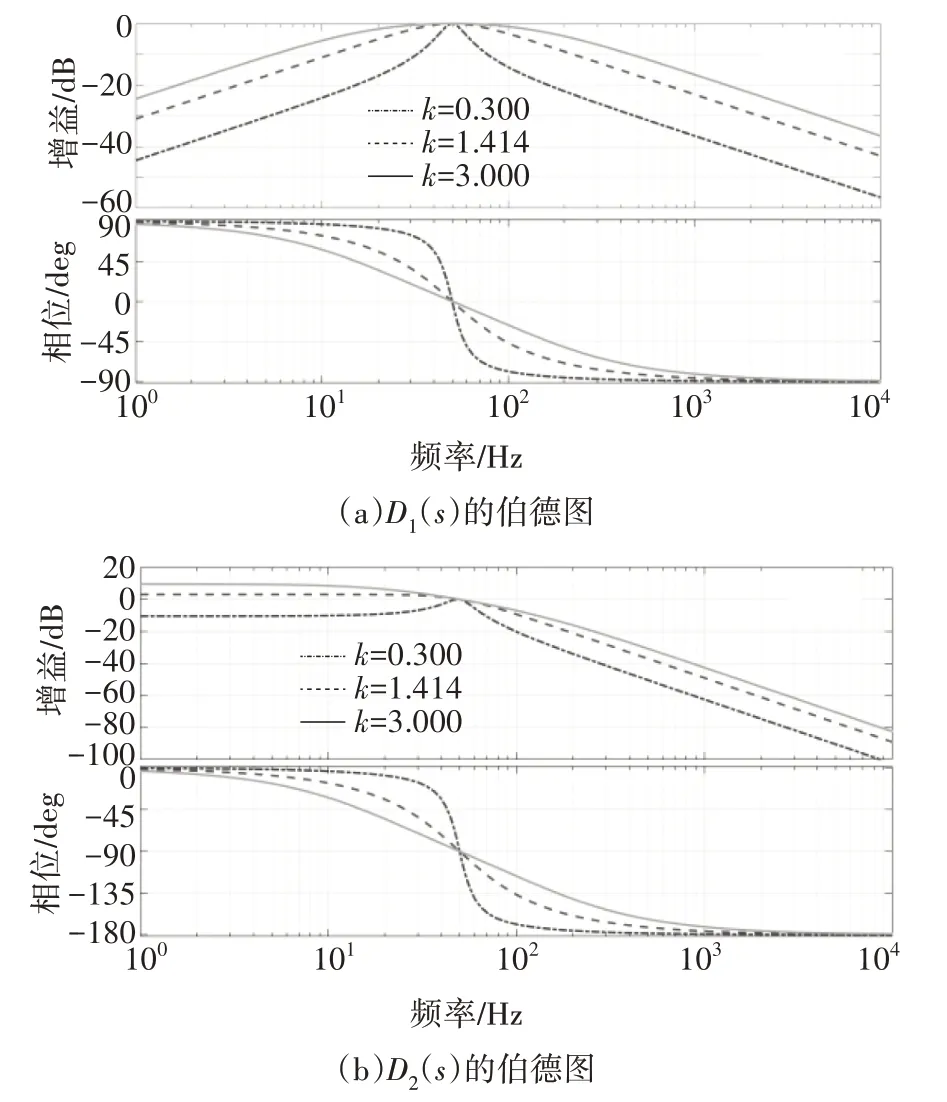
圖4 DSOGI的輸入輸出伯德圖Fig.4 Input output Bode diagram of DSOGI
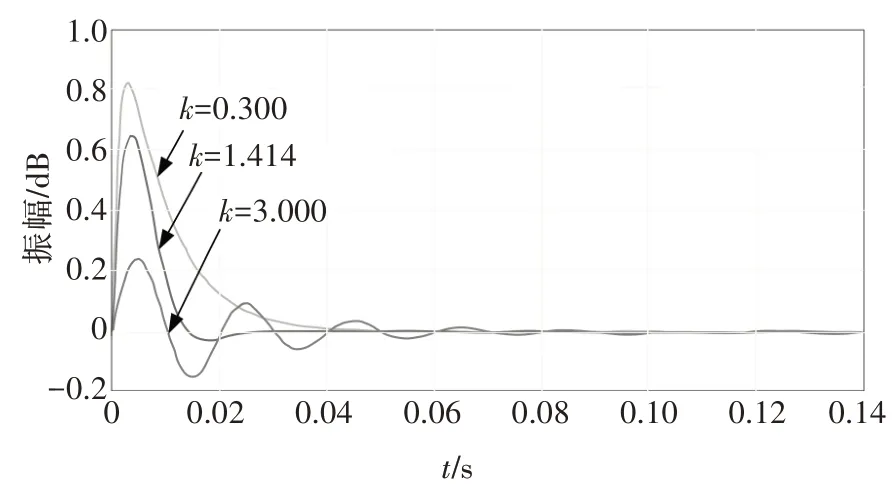
圖5 D1(s)的階躍響應(yīng)曲線Fig.5 Step response curve of D1(s)
設(shè)計好DSOGI 后,再結(jié)合正負序分量計算模塊(Positive and Negative Sequence Control,PNSC)以及SSRF-PLL 就得到了DSOGI-PLL,其結(jié)構(gòu)如圖6 所示[19].DSOGI-PLL 首先采集交流側(cè)電壓信號進行克拉克變換,利用SOGI 輸出信號的正交和濾除諧波特性,實現(xiàn)對輸入電壓基頻信號的正交分相;再由正負序分量計算環(huán)節(jié)計算得到兩相靜止坐標系下的基頻正負序電壓分量,將基頻正序電壓分量輸入到SSRF-PLL中,通過PI控制,完成鎖相,最終實現(xiàn)對相位和頻率的精確提取.利用DSOGI-PLL 輸出的相位和頻率信息,對分離后的兩相靜止坐標系下的電壓基頻正負序分量做派克變換,即可得到精確的正負序dq軸電壓分量.
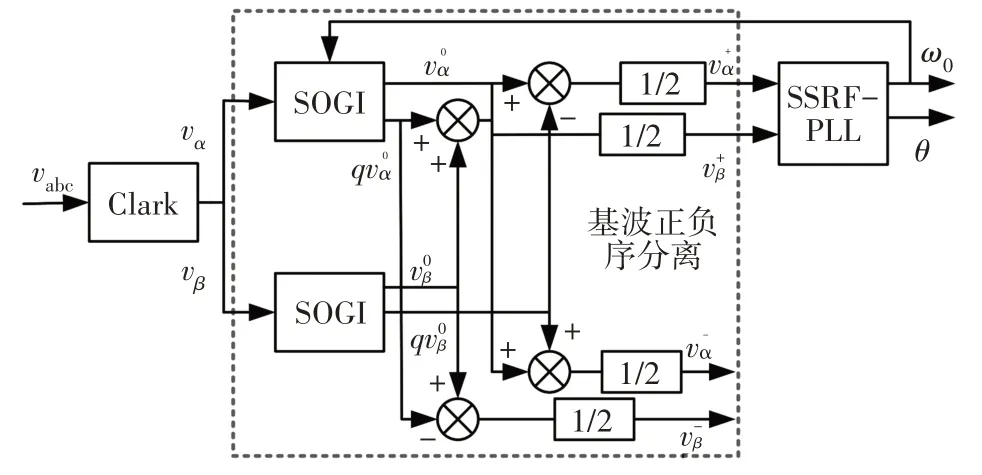
圖6 DSOGI-PLL 整體結(jié)構(gòu)Fig.6 Overall structure of DSOGI-PLL
3.2 基于嵌入式重復(fù)控制器的橋臂環(huán)流抑制
在環(huán)流控制方式的選擇上,基于內(nèi)模原理的重復(fù)控制器可以準確跟蹤周期性信號及倍數(shù)次諧波,適用于抑制環(huán)流,但無法跟蹤直流參考指令,并且重復(fù)控制器在暫態(tài)過程中會延遲一個周波輸出,導(dǎo)致控制速度比較慢.而PI 控制器和重復(fù)控制器組成的復(fù)合控制方式則能有效解決上述問題,并且同時兼顧了PI控制器控制速度快和重復(fù)控制器諧波抑制能力強的優(yōu)點[20].
基于串聯(lián)型結(jié)構(gòu)的嵌入式重復(fù)控制器(PI-RC)橋臂環(huán)流抑制詳細框圖如圖7所示.
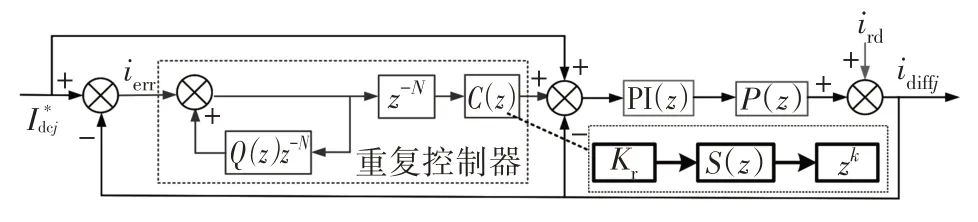
圖7 基于嵌入式重復(fù)控制器的橋臂環(huán)流抑制框圖Fig.7 Arm circulating current suppression based on embedded repetitive controller
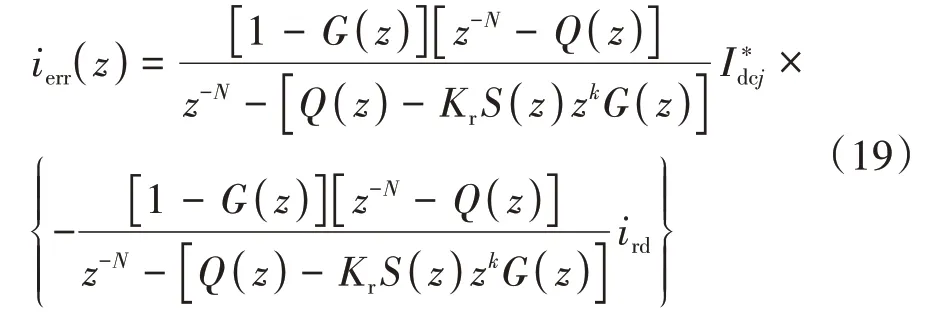
從誤差信號ierr到參考指令信號的傳遞函數(shù)可以表示為:
式中:G(z)為嵌入式重復(fù)控制器中重復(fù)控制器的控制對象.G(z)的傳遞函數(shù)可以表示為:

嵌入式重復(fù)控制器的設(shè)計過程主要由以下幾個部分組成:
1)內(nèi)膜1∕[1-Q(z)z-N].Q(z)是內(nèi)模中的重要環(huán)節(jié),Q(z)對積分效果有一定減弱作用,為了提升控制器的魯棒性能,Q(z)通常選小于1 的常數(shù)或者零相移低通濾波器,本文取0.95.內(nèi)膜的幅頻特性如圖8所示,由圖8可知,諧波具有良好的抑制效果.
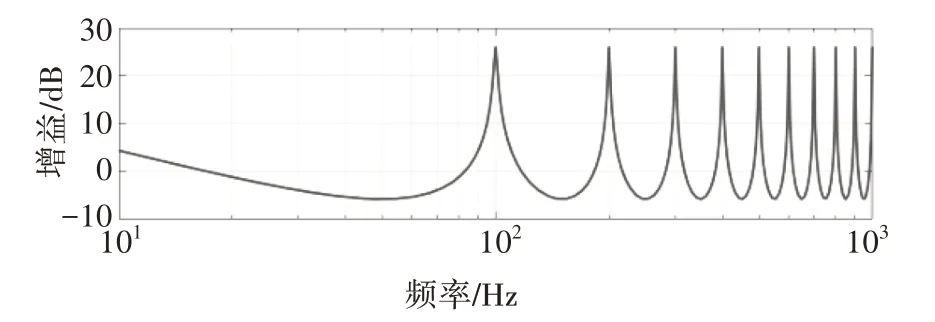
圖8 內(nèi)膜的幅頻特性Fig.8 Amplitude frequency characteristics of intima
2)補償環(huán)節(jié)KrS(z)zk.S(z)的作用是使S(z)G(z)在中高頻段的增益快速衰減,而在中低頻段的增益為1,從而保證控制系統(tǒng)的穩(wěn)定性.本文選用二階低通濾波器,取自然頻率ωn=10ω1,阻尼比ξ=1.S(z)的伯德圖如圖9 所示,由圖9 可知,濾波器在高頻段增益衰減迅速,提高了系統(tǒng)的穩(wěn)定性.
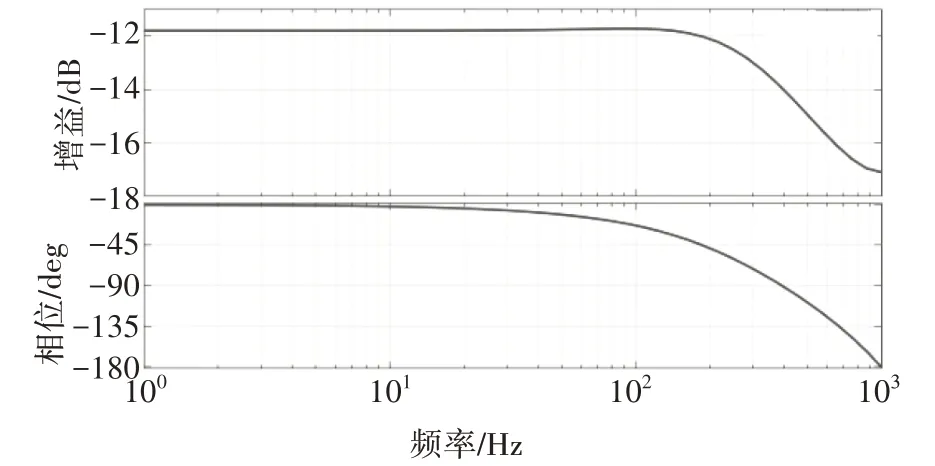
圖9 S(z)的伯德圖Fig.9 Bode chart of S(z)
超前環(huán)節(jié)zk用于相位補償,zk與S(z)G(z)的相頻特性如圖10 所示.由圖10 可知,當k=-6 時,效果最好,在截止頻率內(nèi)兩者幾乎吻合,表明其能夠有效抵消S(z)G(z)的相位滯后.
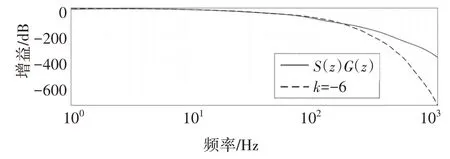
圖10 zk與S(z)G(z)的相頻特性Fig.10 Phase frequency characteristics of S(z)G(z)and zk
重復(fù)控制器的增益Kr(0<Kr<1)對系統(tǒng)的穩(wěn)定性和響應(yīng)速度非常重要,Kr的取值和穩(wěn)定裕度成反比,穩(wěn)定裕度越大,誤差的收斂速度越慢.由式(19)得到重復(fù)控制系統(tǒng)的特征方程為:

綜上,假如所設(shè)計的交流側(cè)電流控制和環(huán)流抑制策略都能很好地實現(xiàn)控制目標,根據(jù)橋臂電壓的表達式,結(jié)合內(nèi)環(huán)雙矢量交流側(cè)電流控制器輸出得到的內(nèi)部電動勢指令值ej_ref,和環(huán)流抑制輸出得到的內(nèi)部不平衡電壓參考值udiffj_ref,從而得到上橋臂和下橋臂電壓的指令值分別為:
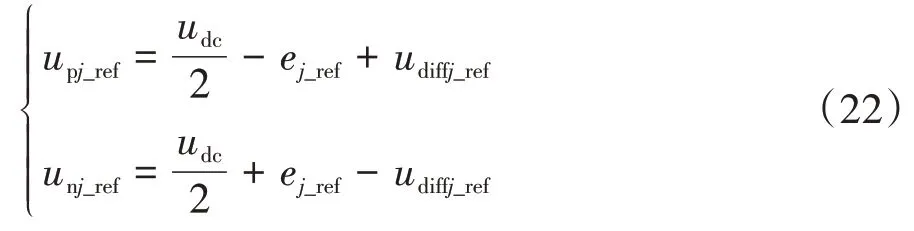
橋臂電壓的參考值經(jīng)歸一化后可作為MMC 的調(diào)制波,最終轉(zhuǎn)換為MMC 橋臂子模塊的開關(guān)信號,外環(huán)控制結(jié)構(gòu)與正常工況下保持一致,從而得到不對稱工況下MMC的整體控制框圖如圖11所示.
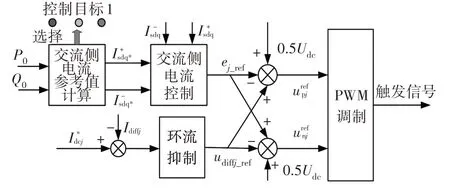
圖11 不對稱工況下MMC控制結(jié)構(gòu)Fig.11 MMC control structure under asymmetric condition
4 仿真分析
為了驗證所提交流側(cè)電流和橋臂環(huán)流優(yōu)化控制策略的有效性,在MATLAB∕Simulink 軟件中搭建了雙端51 電平MMC-HVDC 輸電系統(tǒng)仿真模型,分別在整流站和逆變站模擬交流側(cè)不對稱工況.仿真平臺的主要參數(shù)如表1所示.
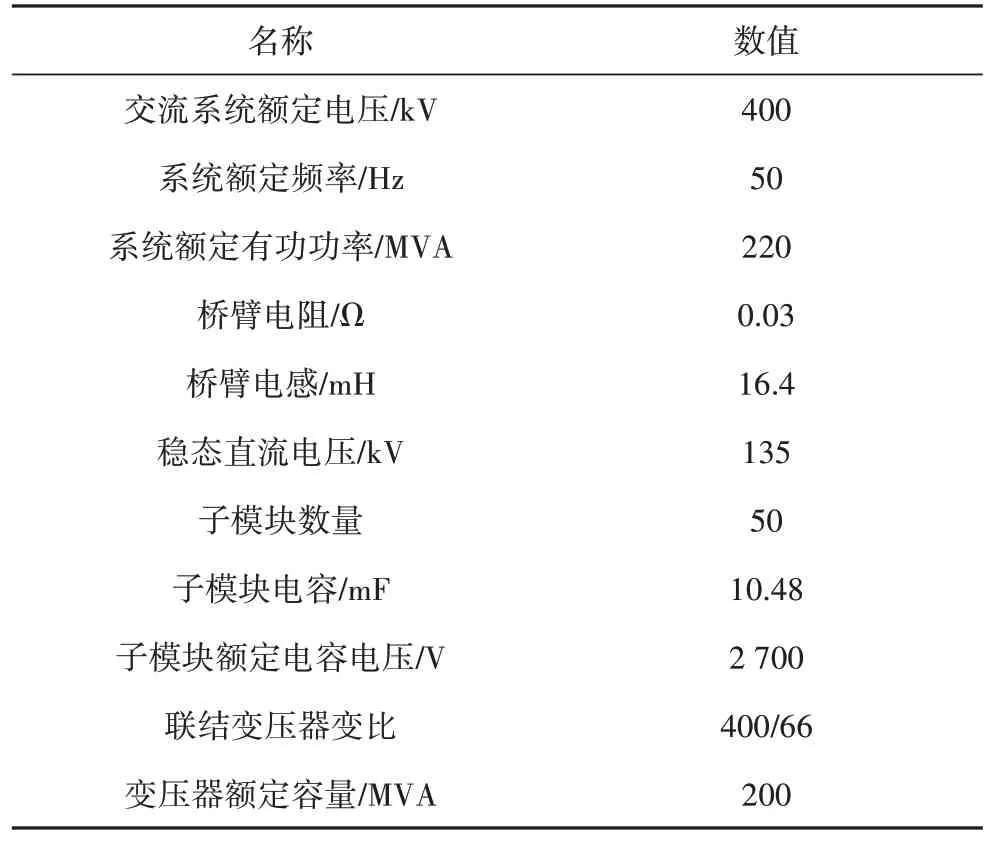
表1 仿真平臺主要參數(shù)Tab.1 Main parameters of simulation platform
MMC-HVDC 系統(tǒng)一開始處于穩(wěn)定運行狀態(tài),在1.4 s時定電壓換流站PCC點a相電壓跌落30%.閥側(cè)三相線電壓仿真結(jié)果如圖12 所示,跌落持續(xù)0.2 s 后切除,此時交流側(cè)電流的控制目標為抑制負序電流.

圖12 閥側(cè)三相線電壓仿真結(jié)果Fig.12 Simulation results of valve side three-phase line voltage
為了更好地驗證本文所提優(yōu)化策略的優(yōu)越性能,選取不對稱工況下的常規(guī)策略作為對比仿真對象,采用SSRF-PLL 和直接抑制負序電流法.仿真結(jié)果分別如圖13和圖14所示.
由圖13(a)(b)和圖14(a)(b)可知,在正常工況下DSOGI-PLL 和SSRF-PLL 都能實現(xiàn)對正負序分量的精確提取,而在網(wǎng)壓不平衡時間段,DSOGI-PLL仿真結(jié)果中二倍頻交流分量更小,提取結(jié)果精度更高,能實現(xiàn)對電壓電流交流量的無靜差跟蹤.
由圖13(c)(d)(e)和圖14(c)(d)(e)可以發(fā)現(xiàn),本文所提優(yōu)化控制策略和常規(guī)策略都能使三相電流保持平衡,但常規(guī)策略下交流側(cè)電流的幅值有所增大;在不對稱工況下,電壓的不對稱使得交流側(cè)瞬時有功功率和無功功率發(fā)生波動,導(dǎo)致本文所提優(yōu)化策略下超調(diào)量明顯更小;同時,由于交流側(cè)電流增大,橋臂電流增大,使得a 相橋臂子模塊中電容電壓的波動也相應(yīng)增大,但常規(guī)策略下子模塊電容電壓的幅值卻發(fā)生了大幅度跌落.
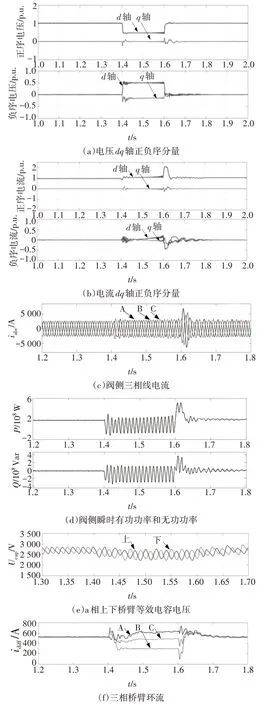
圖13 常規(guī)控制策略的仿真結(jié)果Fig.13 Simulation results of conventional control strategy
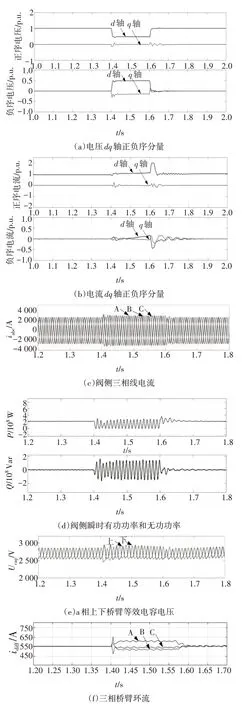
圖14 本文所提優(yōu)化策略仿真結(jié)果Fig.14 Simulation results of the proposed optimization strategy
由圖13(f)和圖14(f)可知,環(huán)流中的二倍頻分量得到了有效抑制,三相橋臂環(huán)流中的直流分量在正常工況下相等,而在故障期間三相橋臂環(huán)流中的直流分量幅值不相等,這和理論分析的結(jié)果相同.
由上可知,本文采用的優(yōu)化策略在不對稱工況下展現(xiàn)出更好的動態(tài)性能和系統(tǒng)優(yōu)越性.
5 結(jié)論
本文通過分析與仿真得到的結(jié)論如下:
1)基于雙二階廣義積分器的鎖相環(huán)在故障情況下能夠準確提取電壓的相位和頻率信息,保證了電壓電流正負序dq軸分量的提取精度,采用雙矢量電流控制器能夠有效控制正負序電流,實現(xiàn)三相電流平衡.
2)由PI控制器和重復(fù)控制器串聯(lián)組成的嵌入式重復(fù)控制器能夠有效跟蹤橋臂環(huán)流的直流參考值,也能夠抑制環(huán)流中的諧波,并且在不對稱工況期間使三相橋臂環(huán)流中的直流分量不相等.
3)由仿真結(jié)果可以說明,嵌入式重復(fù)控制器能兼顧PI控制器的快速響應(yīng)和重復(fù)控制器的諧波抑制能力,在工程領(lǐng)域具有應(yīng)用價值.
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
四川勞動保障(2021年10期)2021-12-02 01:41:42
今日農(nóng)業(yè)(2021年14期)2021-10-14 08:35:28
四川勞動保障(2021年4期)2021-07-22 08:08:54
四川勞動保障(2021年5期)2021-07-19 06:09:54
四川勞動保障(2021年3期)2021-06-09 07:09:22
四川勞動保障(2021年9期)2021-01-27 20:24:59
海峽姐妹(2020年8期)2020-08-25 09:30:18
遵義(2018年14期)2018-08-06 06:32:18
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
