果樹(shù)施肥機(jī)器人的關(guān)鍵技術(shù)研究
2022-09-03 08:25:40郭洪宇姜利鵬邵奧利王偉鵬
南方農(nóng)機(jī) 2022年17期
郭洪宇 , 姜利鵬 , 王 樂(lè) , 邵奧利 , 王偉鵬
(吉林農(nóng)業(yè)大學(xué)工程技術(shù)學(xué)院,吉林 長(zhǎng)春 130118)
對(duì)果樹(shù)精準(zhǔn)有效施肥,能給果樹(shù)生長(zhǎng)提供養(yǎng)分,是果樹(shù)產(chǎn)量形成與品質(zhì)提升的重要保障[1]。農(nóng)業(yè)智能機(jī)器人可以實(shí)現(xiàn)智能育種、作物去雄、病蟲(chóng)害監(jiān)測(cè)、農(nóng)業(yè)電力巡檢等,將智能機(jī)器人技術(shù)應(yīng)用于果林生產(chǎn),能減輕果農(nóng)的勞動(dòng)負(fù)擔(dān),可讓果農(nóng)以更加智能高效、輕松簡(jiǎn)單的方式管理果園,提高收入,幫助果農(nóng)在作物生產(chǎn)過(guò)程中減少農(nóng)藥化肥使用量,有效解決土壤污染和農(nóng)產(chǎn)品農(nóng)藥殘留等問(wèn)題。而果樹(shù)施肥機(jī)器人通過(guò)智能化、集約化的方式進(jìn)行施肥,可以提高施肥效率和施肥精準(zhǔn)度。
1 研究背景
果樹(shù)施肥機(jī)器人的開(kāi)發(fā)具有巨大的經(jīng)濟(jì)效益和廣闊的市場(chǎng)前景,符合未來(lái)農(nóng)業(yè)的發(fā)展趨勢(shì)。我國(guó)是農(nóng)業(yè)大國(guó),農(nóng)作物的精準(zhǔn)生長(zhǎng)越來(lái)越重要,精準(zhǔn)、智能施肥的需求不斷增加。而目前對(duì)農(nóng)作物施肥的普遍方法是撒播式施肥,大量撒施會(huì)造成肥料的浪費(fèi),作物沒(méi)有吸收的、多余的肥料會(huì)滲入地下,污染水源,進(jìn)而影響環(huán)境,也容易造成土壤板結(jié)。果樹(shù)施肥機(jī)器人可以智能識(shí)別作物,實(shí)現(xiàn)自主精準(zhǔn)施肥,因此,有關(guān)果樹(shù)施肥機(jī)器人的研究越來(lái)越重要[2]。
2 研究意義
肥料的精準(zhǔn)播撒不僅可以提高果樹(shù)的吸收利用率,而且還可以提高果樹(shù)成果的質(zhì)量和果樹(shù)的產(chǎn)量。果樹(shù)施肥機(jī)器人之所以具有較高的施肥效率,是因?yàn)樗梢栽趯?shí)際作業(yè)中對(duì)每一棵果樹(shù)進(jìn)行精準(zhǔn)施肥,在新型技術(shù)的輔助下,能替代人工進(jìn)行作業(yè),提高作業(yè)效率。與傳統(tǒng)的施肥方式相比,果樹(shù)施肥機(jī)器人在復(fù)雜多變的作業(yè)環(huán)境中,能通過(guò)感知信息進(jìn)行作業(yè),如果樹(shù)機(jī)器人可采用超聲波測(cè)距原理判斷樹(shù)根位置,實(shí)現(xiàn)精準(zhǔn)施肥,提高肥料的利用率。果樹(shù)施肥機(jī)器人通過(guò)智能化、集約化的方式,可使施肥效率和施肥精準(zhǔn)度達(dá)到一個(gè)新的高度,實(shí)現(xiàn)果園施肥的自動(dòng)化和智能化。在實(shí)際使用中,果樹(shù)施肥機(jī)器人的施肥模塊高度可以調(diào)節(jié),適用于絕大多數(shù)果樹(shù),如橘子樹(shù)、蘋(píng)果樹(shù)和櫻桃樹(shù)等。
3 常見(jiàn)的果樹(shù)施肥方法
按照施肥原理,果樹(shù)的施肥方式主要分為葉面噴肥、注射施肥、土壤施肥、水肥一體化、草肥覆蓋5種類(lèi)型,具體分類(lèi)如圖1所示[3]。果園不同施肥方式的示意圖如圖2所示。
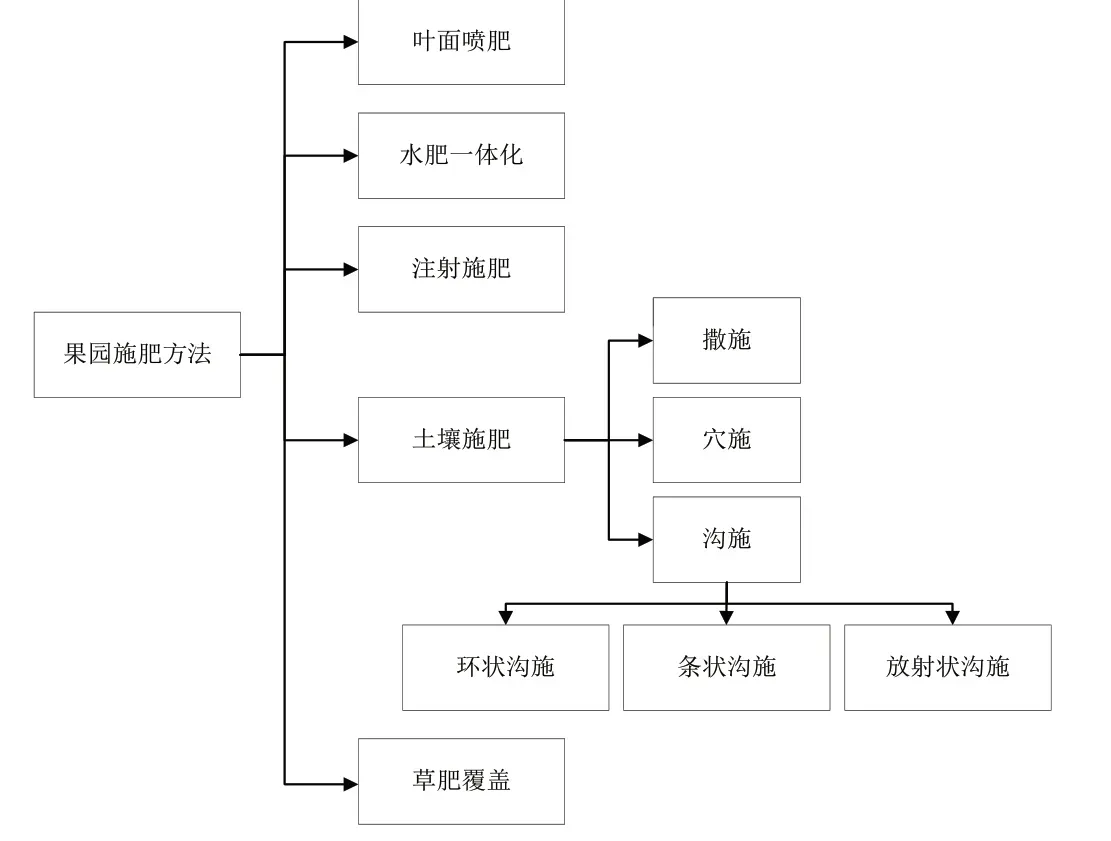
圖1 果園施肥方法

圖2 果園不同施肥方式示意圖
4 果樹(shù)施肥機(jī)器人的關(guān)鍵技術(shù)
果樹(shù)施肥機(jī)器人是一種集合路徑動(dòng)態(tài)規(guī)劃、行為控制、視覺(jué)識(shí)別、環(huán)境感知等多功能于一體的精準(zhǔn)高效施肥的農(nóng)業(yè)技術(shù)設(shè)備[4]。果樹(shù)施肥機(jī)器人的系統(tǒng)組成如圖3所示。一臺(tái)完整的果樹(shù)施肥機(jī)器人主要包括頭腦、神經(jīng)、心臟、五官、手腳等部分。歐陽(yáng)真[5]提出了一種智能果樹(shù)施肥機(jī)器人,通過(guò)視覺(jué)識(shí)別裝置識(shí)別果樹(shù)的樹(shù)根部位,紅外接收模塊接收外部識(shí)別出來(lái)的信息,傳到STM32單片機(jī)主控板,STM32單片機(jī)主控板命令施肥機(jī)構(gòu)轉(zhuǎn)動(dòng),使肥料從滑道滑下,落至樹(shù)根部位置。對(duì)第一棵果樹(shù)施肥之后機(jī)器人根據(jù)所收集的地面信息進(jìn)行循跡,超聲波測(cè)距模塊判斷前方是否有障礙物,依次對(duì)所有果樹(shù)進(jìn)行精準(zhǔn)施肥,實(shí)現(xiàn)果樹(shù)智能施肥。

圖3 果樹(shù)施肥機(jī)器人的系統(tǒng)組成
1)行走控制技術(shù)。果樹(shù)施肥機(jī)器人的行走控制技術(shù)是其實(shí)現(xiàn)多方位運(yùn)動(dòng)控制的關(guān)鍵技術(shù),對(duì)于整個(gè)施肥作業(yè)過(guò)程中的平穩(wěn)運(yùn)行起著至關(guān)重要的作用。近年來(lái),果樹(shù)施肥機(jī)器人正向著智能化、精確化、高效化的方向逐步發(fā)展,進(jìn)而對(duì)行走控制技術(shù)也提出了更高的要求。同時(shí),全閉環(huán)交流伺服驅(qū)動(dòng)技術(shù)、嵌入式運(yùn)動(dòng)控制系統(tǒng)技術(shù)、運(yùn)動(dòng)控制卡技術(shù)、模糊控制技術(shù)等新型控制技術(shù)在實(shí)際生產(chǎn)中的應(yīng)用對(duì)果樹(shù)施肥機(jī)器人的發(fā)展和推廣起著重要的作用。
2)循跡定位技術(shù)。循跡定位技術(shù)是果樹(shù)施肥機(jī)器人實(shí)現(xiàn)精準(zhǔn)高效施肥的關(guān)鍵。在各種導(dǎo)航定位方法中,如GPS導(dǎo)航、計(jì)算機(jī)視覺(jué)導(dǎo)航、計(jì)算視覺(jué)定位導(dǎo)航技術(shù)均有非常多的優(yōu)點(diǎn)。當(dāng)前對(duì)果樹(shù)施肥機(jī)器人的循跡定位研究主要集中在視覺(jué)識(shí)別和GPS導(dǎo)航這兩種方式上。同時(shí),我國(guó)研發(fā)的北斗導(dǎo)航精確度越來(lái)越高,在果樹(shù)施肥方面將會(huì)產(chǎn)生引導(dǎo)性作用。
3)傳感器避障技術(shù)。果樹(shù)施肥機(jī)器人在農(nóng)田進(jìn)行實(shí)際作業(yè)時(shí),工作環(huán)境較為復(fù)雜,作業(yè)對(duì)象不確定性較高,同時(shí)不同果樹(shù)的施肥情況不一樣。因此,傳感器在這個(gè)過(guò)程中起到至關(guān)重要的作用。現(xiàn)有的果樹(shù)施肥機(jī)器人傳感器主要包括觸覺(jué)傳感器、視覺(jué)傳感器、超聲波傳感器等[6]。傳感器設(shè)置在外界環(huán)境與果樹(shù)施肥機(jī)器人的連接位置,是其獲取實(shí)際環(huán)境實(shí)時(shí)情況的重要途徑。果樹(shù)施肥機(jī)器人在工作時(shí)實(shí)現(xiàn)循跡、定位和路徑規(guī)劃等功能時(shí)均依賴(lài)于傳感系統(tǒng)。隨著技術(shù)的發(fā)展,不斷開(kāi)發(fā)和應(yīng)用更多傳感器融合技術(shù)是提高果樹(shù)施肥機(jī)器人精準(zhǔn)施肥、環(huán)境適應(yīng)能力的有效措施。
4)智能學(xué)習(xí)技術(shù)。鑒于果樹(shù)施肥機(jī)器人工作環(huán)境的多樣性與復(fù)雜性,進(jìn)行相應(yīng)的數(shù)學(xué)建模比較困難,因此,果樹(shù)施肥機(jī)器人應(yīng)該向著智能化的方向發(fā)展,而智能化果樹(shù)施肥機(jī)器人的技術(shù)關(guān)鍵是在模糊控制于神經(jīng)網(wǎng)絡(luò)控制的自適應(yīng)性和自主學(xué)習(xí)能力。同時(shí),果樹(shù)施肥機(jī)器人可以在人為的協(xié)助下不斷地學(xué)習(xí),逐漸形成自身處理復(fù)雜情況的知識(shí)系統(tǒng),從而使其更具有實(shí)用價(jià)值[7]。
5 果樹(shù)施肥機(jī)器人研究存在的問(wèn)題與對(duì)策
我國(guó)對(duì)于果樹(shù)施肥機(jī)器人的研究起步比較晚,與發(fā)達(dá)國(guó)家相比,在技術(shù)方面仍存在差距。果樹(shù)施肥機(jī)器人的發(fā)展還需要結(jié)合具體的實(shí)際作業(yè)環(huán)境,同時(shí)兼顧實(shí)用性、先進(jìn)性、經(jīng)濟(jì)性等,研發(fā)出符合我國(guó)果樹(shù)需要的施肥機(jī)器人[8]。
1)存在的問(wèn)題。目前,在果樹(shù)施肥機(jī)器人的實(shí)際應(yīng)用中主要存在的問(wèn)題有兩方面:①果樹(shù)施肥機(jī)器人的智能化水平有待提高。在實(shí)際農(nóng)業(yè)生產(chǎn)中,果樹(shù)生長(zhǎng)特點(diǎn)、環(huán)境條件等均有不同,因而對(duì)于果樹(shù)施肥機(jī)器人的智能施肥有較高要求。例如,需要果樹(shù)施肥機(jī)器人對(duì)于田地間的障礙物具有敏捷的避障能力。同時(shí),對(duì)不同環(huán)境果樹(shù)施肥時(shí),其對(duì)施肥位置需要有較強(qiáng)的辨識(shí)能力。當(dāng)前專(zhuān)家對(duì)于果樹(shù)施肥機(jī)器人研究的重點(diǎn)也逐漸從其他機(jī)械化的組成部分轉(zhuǎn)移到果樹(shù)施肥機(jī)器人的智能化方面,同時(shí)在其他技術(shù)方面也進(jìn)行了相應(yīng)的改進(jìn),如對(duì)施肥時(shí)攝像頭識(shí)別定位以及機(jī)器人自動(dòng)循跡等方面進(jìn)行了處理。但總體來(lái)看,目前我國(guó)在果樹(shù)施肥機(jī)器人智能化方面的研究仍存在一定的缺陷,影響了當(dāng)前水果等農(nóng)副產(chǎn)品的生產(chǎn)與發(fā)展。②果樹(shù)施肥機(jī)器人的制作成本較高。目前,我國(guó)對(duì)果樹(shù)施肥機(jī)器人的研究中大多數(shù)是針對(duì)某一種果樹(shù)的某一生長(zhǎng)期來(lái)進(jìn)行研究,在實(shí)際生產(chǎn)過(guò)程中存在效率低、使用針對(duì)性強(qiáng)的問(wèn)題。這使得果樹(shù)施肥機(jī)器人的生產(chǎn)制造成本大大提高,不利于果樹(shù)施肥機(jī)器人的推廣,導(dǎo)致果樹(shù)施肥機(jī)器人在當(dāng)前果產(chǎn)品生產(chǎn)中很難大范圍進(jìn)行使用。
2)應(yīng)對(duì)措施。應(yīng)加大對(duì)果樹(shù)施肥機(jī)器人的研發(fā)支持力度,引導(dǎo)果樹(shù)施肥機(jī)器人向著智能化、自動(dòng)化、精準(zhǔn)化的方向發(fā)展,最終實(shí)現(xiàn)產(chǎn)業(yè)化,并進(jìn)行推廣應(yīng)用。①可以通過(guò)長(zhǎng)時(shí)間的探索,歸納總結(jié)果樹(shù)施肥的最佳作業(yè)方法,提高水果等農(nóng)副產(chǎn)品的質(zhì)量與產(chǎn)量。②果樹(shù)施肥機(jī)器人不僅要對(duì)目前人工種植的過(guò)程進(jìn)行實(shí)際模擬,而且還應(yīng)該融入當(dāng)下難以實(shí)現(xiàn)機(jī)械自動(dòng)化的領(lǐng)域。在果樹(shù)施肥機(jī)器人的設(shè)計(jì)與制造過(guò)程中應(yīng)保證其統(tǒng)一性與規(guī)范性,從而降低其生產(chǎn)成本,使其能夠更廣泛地應(yīng)用于實(shí)際生產(chǎn)中[9]。③在果樹(shù)施肥機(jī)器人的設(shè)計(jì)中盡可能實(shí)現(xiàn)一機(jī)多用的功能,以提高施肥時(shí)的作業(yè)效率,解放勞動(dòng)力,同時(shí)降低其制造成本,進(jìn)而產(chǎn)生更好的經(jīng)濟(jì)效益。
6 結(jié)語(yǔ)
綜上所述,隨著互聯(lián)網(wǎng)技術(shù)、循跡定位技術(shù)以及傳感器避障技術(shù)等科學(xué)技術(shù)的發(fā)展,果樹(shù)施肥機(jī)器人應(yīng)該具有開(kāi)放式結(jié)構(gòu)、良好擴(kuò)展性、通用性和柔性作業(yè)的能力,從而優(yōu)化機(jī)器人功能,降低其生產(chǎn)成本,真正實(shí)現(xiàn)普及和應(yīng)用。如可以通過(guò)更換相應(yīng)機(jī)械結(jié)構(gòu)與末端執(zhí)行器來(lái)適應(yīng)不同類(lèi)型的果樹(shù),實(shí)現(xiàn)一機(jī)多用的功能,進(jìn)而提高果樹(shù)施肥機(jī)器人的作業(yè)效率;不斷優(yōu)化果樹(shù)施肥機(jī)器人的各部分結(jié)構(gòu)與功能,向著小型化、輕量化的方向發(fā)展;進(jìn)一步對(duì)視覺(jué)識(shí)別系統(tǒng)、圖像采集和處理的算法深入研究與探索,同時(shí)配合靈敏度較高的傳感器使用,從而改善其避障能力,達(dá)到作業(yè)過(guò)程中的智能化、自動(dòng)化、精準(zhǔn)化的目的[10];引入柔性材料、納米材料等新材料技術(shù)到果樹(shù)施肥機(jī)器人領(lǐng)域,促進(jìn)對(duì)果樹(shù)無(wú)損傷作業(yè)技術(shù)的發(fā)展。以使果樹(shù)施肥機(jī)器人能夠?yàn)楫a(chǎn)業(yè)的發(fā)展提供更多幫助,提高水果的產(chǎn)量與質(zhì)量。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
印刷工業(yè)(2020年4期)2020-10-27 02:45:52
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
中國(guó)交通信息化(2017年4期)2017-06-06 07:21:52
故事大王(2016年7期)2016-09-22 17:30:08
能源(2015年8期)2015-05-26 09:15:56
