基于5G NR的智能鐵路定位技術研究
2022-09-06 09:14:16方榮一孫韶輝
鐵路計算機應用 2022年8期
李 輝,方榮一,于 哲,任 斌,孫韶輝
(1. 中信科移動通信技術股份有限公司 創新中心,北京 100083;2. 電信科學技術研究院有限公司 無線移動通信國家重點實驗室,北京 100083;3. 電信科學技術研究院有限公司 新一代移動通信無線網絡與芯片技術國家工程實驗室,北京 100083)
隨著第5代移動通信技術(5G,5th Generation Mobile Communication Technology)標準的推進和實施,5G設備與應用場景日漸成熟。由于鐵路網規模的擴大、安全保障的需要和業務需求的增長,亟需將5G應用于智能鐵路的研究中 ,促進鐵路通信網與互聯網的融合發展[1]。智能鐵路定位已在綜合運營管理、列車運行自動控制、電子付費、緊急救援及安全監控等方面取得了很多成果。文獻[2]基于5G通信的列車控制系統,在城市軌道交通中實現了列車喚醒、休眠、自動進出段、自動洗車等全自動運行功能;文獻[3]通過對5G車地通信技術的研究,實現列車運行控制及自動駕駛,保障鐵路安全、可靠及高效運營。
基于5G蜂窩網絡(RAT-dependent)的定位技術包括[4]:下行到達時間差(DL-TDOA,Downlink Time Difference of Arrival)定位法、上行到達時間差(UL-TDOA,Uplink Time Difference of Arrival)定位法、多小區往返時間(Multi-RTT,Multiple Round Trip Time)、下 行 出 發 角(DL-AOD,Downlink Angle of Departure)、上 行 到 達 角(UL-AOA,Uplink Angle of Arrival)和增強小區標識(E-CID,Enhanced Cell ID)定位法等。第3代合作伙伴計劃(3GPP,3rd Generation Partnership Project)技術規范第17版進一步規范了多種定位增強技術[5-6],包括收發時間誤差影響消除、非視距和多徑的識別及影響消除、UL-AOA定位增強、DL-AOD定位增強、降低定位延遲、按需求分配的定位參考信號(PRS,Positioning Reference Signal)等,為定位性能的提升提供了保障。
本文分析智能鐵路的定位需求,結合基于正交頻分復用技術的全新空口設計的全球性第5代移動通信技術標準(簡稱:5G 新空口)(5G NR)定位技術,選用TDOA方法,設計了上行和下行定位方案,解決了智能鐵路低速場景定位問題,同時針對高速和隧道場景給出了潛在的信號增強方案。
1 智能鐵路中的定位需求分析
1.1 定位精度要求
文獻[7]中對高速鐵路場景的定位精度要求如表1所示,其中的定位精度為絕對精度(以累計概率密度90%點的定位誤差衡量)。由于列車較快的移動速度會產生較強的多普勒效應,因此定位精度要求隨列車速度的提升而降低。
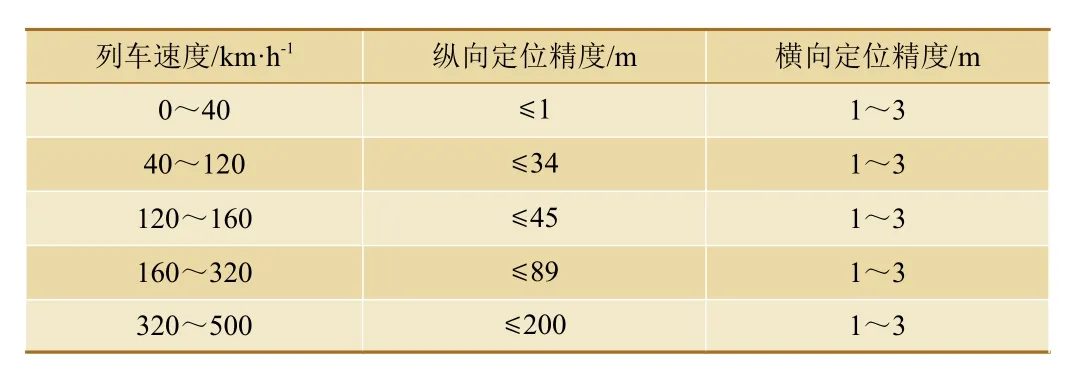
表1 高速鐵路場景定位精度要求
1.2 應用場景
智能鐵路中的定位分為低速和高速場景,且均包含無全球衛星導航系統(GNSS,Global Navigation Satellite System)信號的隧道環境。
(1)低速定位場景。包括:①養護維護時上道人員、下道人員的清點,如鐵路線路養護和設備故障處理時天窗作業人員的高精度定位;②貨運場站內人員、設備、貨物等空間定位,如貨車沿途停靠時向地面設備傳遞貨車狀態信息;③鐵路隧道中工作人員的定位場景,如鐵路建設時期,通過自組網設備實時掌握施工作業人員的位置分布。
(2)高速定位場景。包括:①車載設備向地面設備發送位置信息;②地面設備將位置信息發送至車載設備;③鐵路貨物在途運輸中的空間定位等。
1.3 部署場景
文獻[8]中定義了高速鐵路定位的部署場景,其布局如圖1所示。其中,軌道寬度為3.38 m,間隔6 m,在鐵路兩旁100 m處引入了沿軌道分布具有波束賦形能力的遠端射頻單元(RRH, Remote Radio Head),每3個RRH連接到同一個基帶處理單元(BBU,Base Band Unit),各RRH間隔1 732 m。
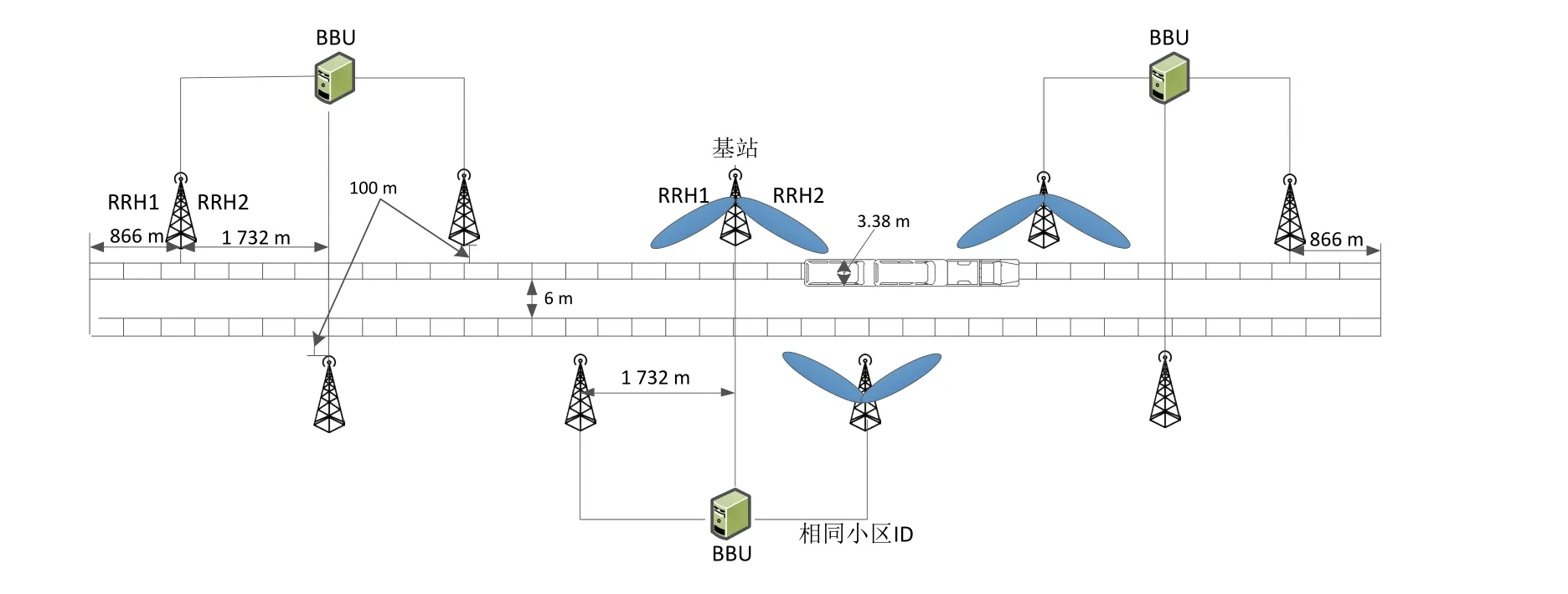
圖1 高速鐵路定位部署場景
2 智能鐵路中的定位技術原理
智能鐵路定位對列車的高度位置需求不高,因此只需考慮水平定位。TDOA是一種基于信號傳播時間差以確定終端位置的估計方法。終端位于以基站為焦點的雙曲線上,2條雙曲線的交點確定終端的二維位置坐標。二維情形中的TDOA定位原理如圖2所示,在測得多個TDOA值后,建立方程為
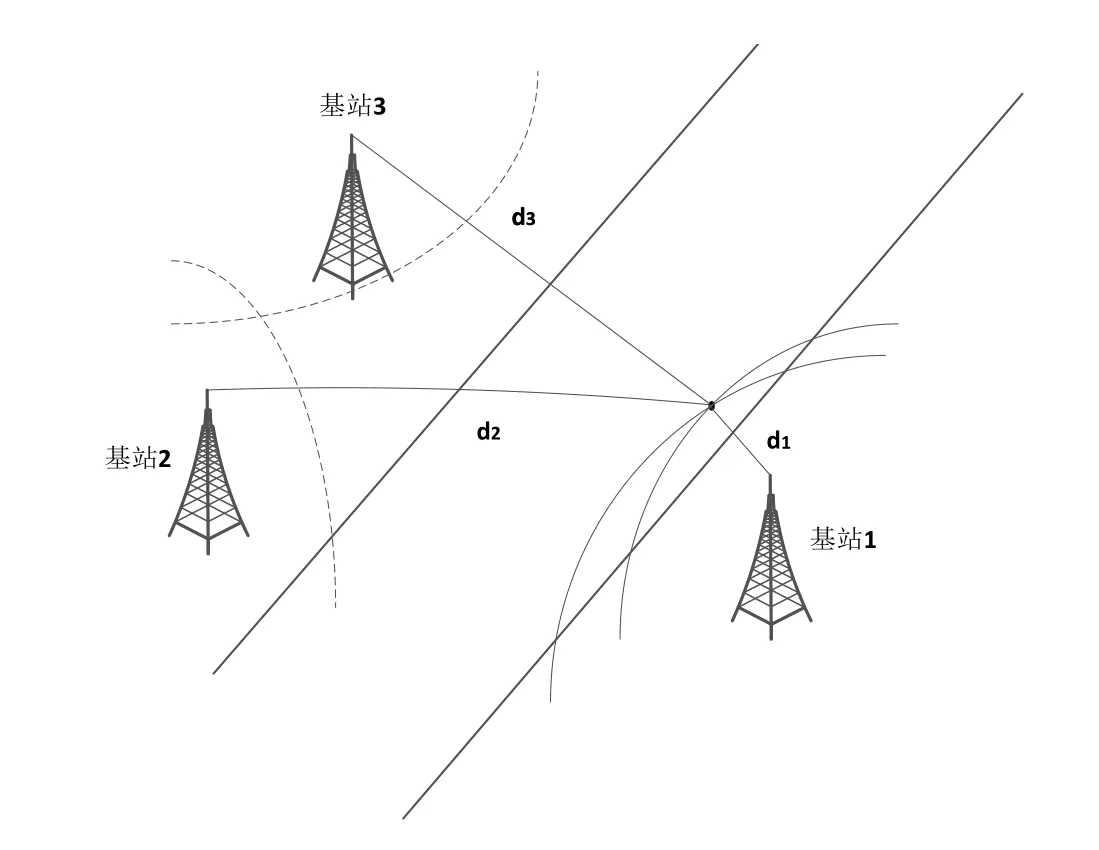
圖2 二維情形中的TDOA定位原理

其中, (x,y)為 終端的待定坐標; (xi,yi)為第i個基站的坐標;di為 終端到第i個基站的距離;di,1為終端到第i個基站的距離與終端到第1個基站距離之差;c為電磁波的傳播速度;τi,1為所測得的終端到達基站i與到達基站1的TDOA測量值。
以第i個基站(i=2,···,N)和第1個基站為焦點的雙曲線的交點即是終端的位置坐標,根據公式(1)和(2)建立方程組
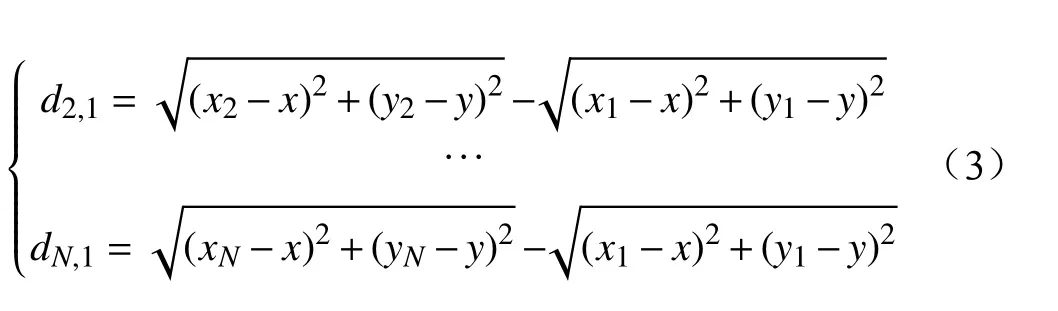
求解方程組(3)即可得到終端的估計位置。TDOA定位方法適用于信號在視距傳播的情況。此外,若只有3個基站用作定位,可能會出現終端的虛假位置,需要其他先驗信息(如軌道線路圖)或使用4個基站解算終端位置坐標[9]。
3 智能鐵路中的定位技術
由于6 GHz以上頻段的載波信號頻率高,信號衰減大,定位系統的覆蓋受限,考慮到鐵路軌道周圍基站的覆蓋范圍,針對智能鐵路場景部署的蜂窩系統工作頻段主要為6 GHz以下的低頻段。當前的5G NR定位系統的第一頻率范圍場景可以滿足智能鐵路低速場景下的定位需求。在進行位置解算時,考慮到列車運行軌道固定,可以進一步約束水平運行方向位置的取值,確定位置信息。
3.1 下行定位
3.1.1 下行定位參考信號
在下行定位技術中,終端通過接收和測量各基站發送的下行PRS獲得定位測量值。對于智能鐵路系統,圖1每個基站可配置一個下行PRS資源集,其中包含2個下行PRS資源,每個資源分別對應一個發送波束方向(覆蓋列車軌道)。此資源集以周期性方式傳輸,可根據定位時延及參考信號占用的資源來配置PRS資源集的傳輸周期。5G NR定位系統中,PRS傳輸周期最小可以配置為4 ms,最長可配置為10 240 ms。
在5G NR定位系統中,一個PRS資源可以占用{2,4,6,12}個連續的正交頻分復用(OFDM,Orthogonal Frequency Division Multiplexing)符號,一個PRS資源包含的OFDM符號個數越多,用戶終端(UE,User Equipment)在接收端進行相干合并可累積的處理后信噪比越大,測量性能越好,但資源占用越大。一個PRS資源在頻域上最大可占用272個物理資源塊(PRB,Physical Resource Block)并且以梳齒的方式支持多個不同的下行PRS資源在不同的子載波上復用,例如,梳齒取值為2,表示每兩個子載波占用一個子載波資源。PRS資源占用的頻域帶寬越大,時域分辨率越高,可以獲得更高的定位精度,支持的梳齒取值包括2/4/6/12,表示在頻域上間隔2/4/6/12個子載波。考慮到智能鐵路精確定位的需求,可以配置較高密度的PRS資源圖樣和較大的PRS帶寬。例如,可配置一個占用6個OFDM符號,梳齒取值為6的PRS資源,資源圖樣如圖3所示。其中,橫軸為時域的OFDM符號,縱軸為頻域的子載波。
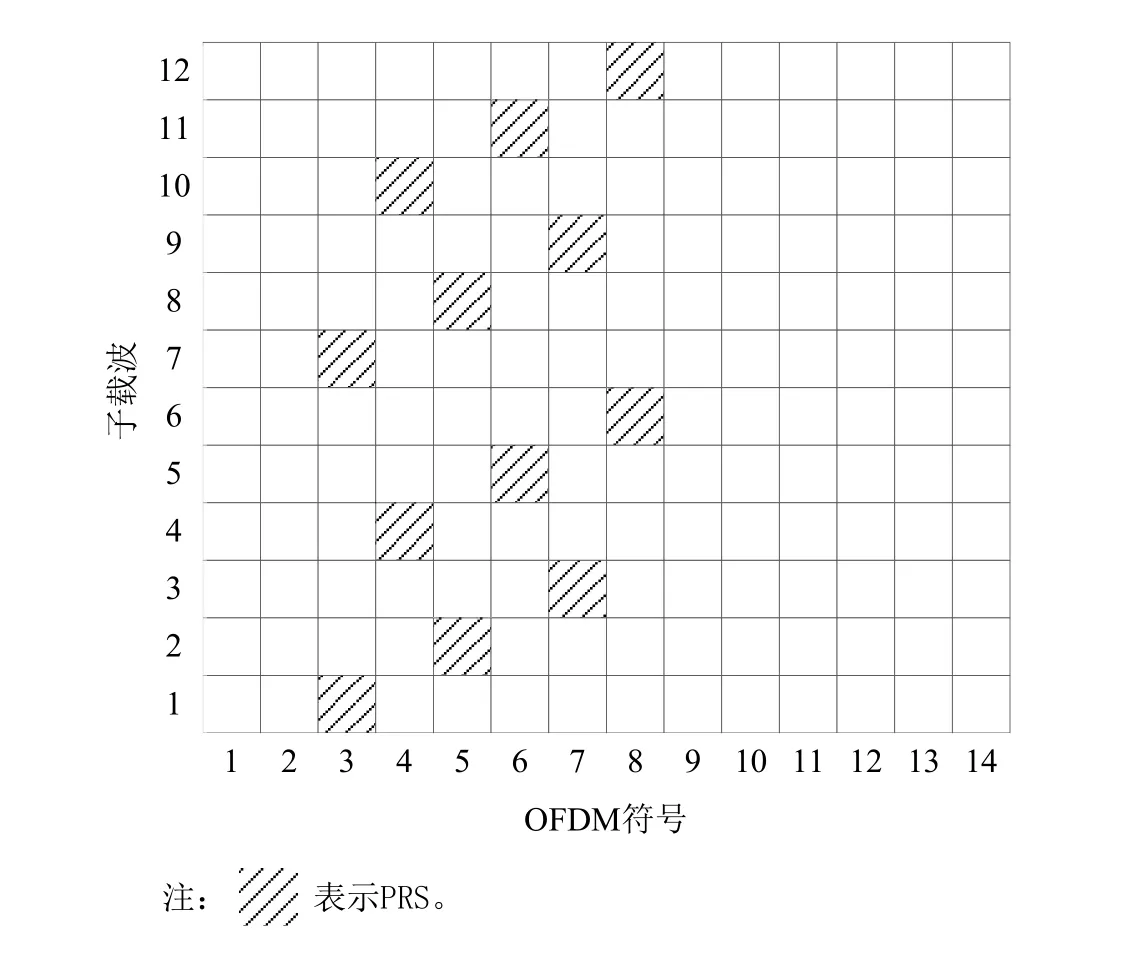
圖3 符號個數為6、梳齒取值為6的PRS圖樣
3.1.2 下行定位測量值
對于DL-TDOA技術,終端通過測量多個基站的PRS資源,獲得參考信號的時間差(RSTD,Reference Signal Time Difference)[10]。RSTD定 義 為終端接收到測量基站和參考基站子幀的開始時刻的時間差。終端接收到的參考基站的子幀開始時刻定義為RSTD參考時間,參考基站可以由網絡側配置,也可以由終端根據測量質量等特性自行選擇一個PRS資源確定RSTD的參考時間。
為了使網絡側能夠在上報的測量值中選擇更好的測量值用于定位計算,終端可以指示每個測量值的測量質量。測量質量包括:①誤差取值:指示測量值不確定性的最優估計值;②誤差分辨率:指示誤差取值的量化步長。
在智能鐵路場景中,終端可對每個基站上報一個或多個RSTD測量值[6]及測量質量,并確定RSTD相關聯的時間戳,指示此次上報測量值的有效時間。
3.1.3 下行定位流程
對于智能鐵路場景下的終端輔助定位,終端的位置信息可由定位服務器(LMF,Location Management Function)根據終端上報的測量值解算獲得。終端與LMF之間的信令交互具體流程如圖4所示[11]。
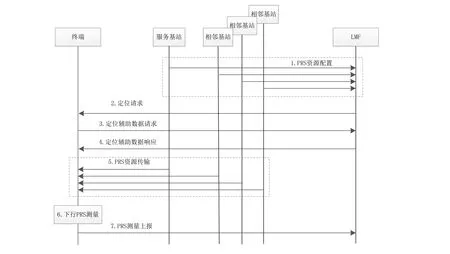
圖4 智能鐵路場景下的下行定位流程
(1)每個基站將 PRS 配置通知給 LMF;
(2)LMF請求終端上報TDOA的相關測量值;
(3)終端向LMF請求輔助定位數據;
(4)LMF為終端指示相應的定位輔助數據;
(5)每個基站發送 PRS給終端;
(6)終端確定定位測量值;
(7)終端將定位測量值上報給LMF,LMF根據定位測量值確定終端位置。
為了減少定位時延,智能鐵路場景也可采用終端自主定位,即終端的位置信息由終端根據測量值解算獲得。此時,步驟(4)中的定位輔助數據還必須提供基站的位置信息用于終端進行位置解算,步驟(7)中終端可直接上報位置解算結果。
3.2 上行定位
3.2.1 上行定位參考信號
在5G NR定位系統中使用定位專用上行探測參考 信 號(SRS-Pos,Sounding Reference Signal for Positioning)進行上行定位 。一個SRS-Pos資源在時域上可以占用{1,2,4,8,12}個連續的OFDM符號,在頻域上最大支持帶寬為272個PRB。與下行類似,對于工作頻點在6 GHz以下的智能鐵路系統,每個終端可以配置一個SRS資源集,每個SRS資源集包含一個SRS-Pos資源。為了提升SRS-Pos信號的覆蓋范圍與鄰基站的接收質量,在智能鐵路場景下,可以配置SRS-Pos占用較多的OFDM符號。根據定位精度的需求,可以配置最大的頻域帶寬。
SRS-Pos采用了一種交錯圖樣的設計來映射同一個SRS-Pos資源內的不同OFDM符號上的SRS-Pos資源單元。該交錯圖樣的具體配置與SRS-Pos資源被配置的梳齒取值及其占用的OFDM符號數量有關。OFDM符號數為12,梳齒取值為8的SRS-Pos資源圖樣如圖5所示。
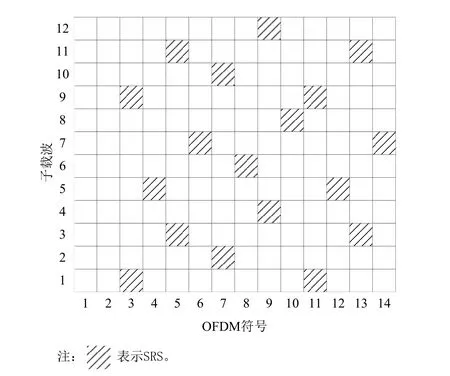
圖5 符號個數為12、梳齒取值為8的SRS-Pos圖樣
在智能鐵路系統中,可以根據應用場景需求配置周期或非周期的SRS-Pos資源。例如,為了支持按需定位場景,僅當需要定位服務時才發送定位用SRS-Pos,此時可以使用非周期SRS-Pos資源。
終端上行發送定時通過定時提前(TA,Timing Advance)調整來控制,以確保小區中的所有上行傳輸到達基站時保持對齊。對于SRS-Pos,需基于服務小區進行TA計算。
3.2.2 上行定位測量值
對于UL-TDOA技術,每個基站測量相對到達時間(RTOA,Relative Time of Arrival),即基站接收到的包含SRS的子幀開始時間與絕對系統幀號的相對時間[10]。
在智能鐵路場景中,每個基站通過對SRS-Pos的測量,可以獲得1個或2個RTOA測量值[6]及測量質量,并確定此RTOA相關聯的時間戳,指示此次上報測量值的有效時間。
3.2.3 上行定位流程
與下行定位不同,終端的位置信息由LMF根據基站上報的測量值解算獲得。為了獲得上行測量值,參與定位的基站需要已知終端發送的SRS-Pos信號。因此,LMF需要向終端的服務基站指示,要求終端傳輸SRS-Pos信號。此信號的時頻資源分配由服務基站自行確定,并將此配置信息反饋給LMF,由其轉發配置給多個基站,具體流程如圖6所示[11]。
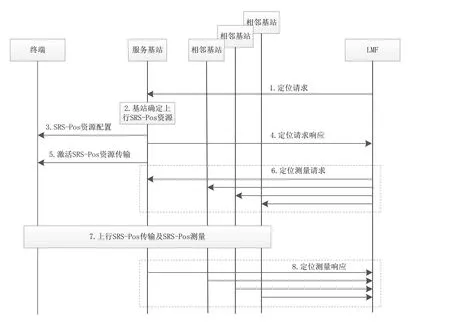
圖6 智能鐵路場景下的上行定位流程
(1)LMF向服務基站發送定位請求信令,請求服務基站上報目標終端的上行SRS-Pos配置信息;
(2)服務基站確定上行SRS-Pos資源分配;
(3)服務基站為目標終端配置上行SRS資源集合;
(4)服務基站通過定位請求響應信令向LMF上報上行SRS-Pos的配置信息;
(5)服務基站激活終端傳輸上行SRS-Pos;
(6)LMF通過測量請求信令向選定的多個基站發送上行SRS-Pos配置信息,包括目標終端的服務小區ID、SRS-Pos的資源配置、上行定時信息等;
(7)目標終端根據上行SRS-Pos資源配置傳輸上行SRS-Pos,其時域行為由基站配置;
(8)每個基站測量目標終端傳輸的上行SRSPos,并將測量結果上報給LMF,LMF根據定位測量值確定終端位置。
4 智能鐵路的潛在定位增強技術
4.1 高速場景下的增強
在列車高速移動場景下,上行和下行參考信號的多普勒頻移增加,接收端測量的RSTD及RTOA的精度下降,進而影響定位精度[12]。為了滿足定位精度需求,在后續研究中,可考慮在接收端設計高級的接收機算法,或考慮改變定位參考信號的傳輸方式,如利用單頻網或多普勒頻移預補償的傳輸方式,改善定位精度。
4.2 隧道場景下的增強
文獻[13]中提出了基于5G信號的載波相位定位方案。
以上行定位為例,基于5G信號的載波相位定位流程如圖7所示。對于絕對定位,假設參考發射機的位置是已知的;對于相對定位,參考發射機的位置可作為定位坐標系的原點。具體流程為:(1)參考發射機和待定位的UE發送各自所配置的SRS-Pos信號;(2)各個基站接收 SRS-Pos 以提供 TDOA和載波相位測量值;(3)利用TDOA測量值,通過UL-TDOA求得UE的初始位置;(4)利用擴展卡爾曼濾波器(EKF,Extended Kalman Filter)進行UE位置以及載波相位整數模糊度的估計;(5)將EKF的估計結果用于整數模糊度的搜索和解算;(6)校正和去除原始載波相位測量中的整數模糊度,進行高精度UE定位。與GNSS載波相位定位類似,基于5G信號的載波相位定位精度也可達到厘米級。
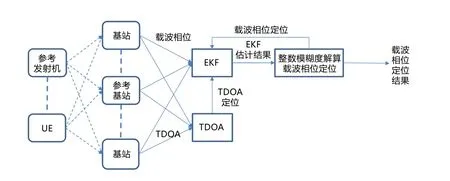
圖7 基于5G信號的載波相位定位流程
5G定位方法(包括基于5G NR信號的載波相位定位)還可與其他方法(慣性導航和列車軌道圖等)相結合,為隧道場景提供高精度、高可靠性的定位信息。當列車未能接收到GNSS信號,或GNSS信號不強而無法高精度確定列車的絕對位置時,通過結合基站PRS的測量值和其他定位傳感器所提供的測量值(如慣性傳感器輸出的姿態、速度和位置),可高精度地進行列車定位。運營商可根據需要,在GNSS無法提供高精度定位信息的環境下,調整發送PRS的發送端數量、位置、發射頻率、發射功率等,以保證列車導航定位系統性能。
5 結束語
本文通過分析智能鐵路場景定位精度需求,結合5G NR定位技術,提出了智能鐵路低速場景下的上行和下行定位解決方案。基于DL-TDOA技術和UL-TDOA技術,通過時間測量值確定終端的位置信息,既可用于缺少衛星信號覆蓋的隧道、涵洞等場景,也可與衛星定位相結合,進一步提升定位精度。
猜你喜歡
云南畫報(2021年12期)2021-03-08 00:50:54
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
鐵道通信信號(2018年7期)2018-08-29 01:17:04
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
通信電源技術(2016年4期)2016-04-04 02:58:04
