基于AADL的電網信息物理系統分層建模
2022-09-07 05:05:46吳梓豪張立臣
現代計算機 2022年13期
吳梓豪,張立臣
(廣東工業大學計算機學院,廣州 510006)
0 引言
隨著市場化改革的推進、氣候變化的加劇,環境監管日益嚴格,可再生能源等分布式發電資源數量不斷增加,智能電網的概念應運而生。其目標是利用現代測量、通信、計算機、自動化等先進技術,允許可再生能源順利接入電網,提高電力系統的能源轉換和傳輸效率,確保電網運行更可靠、更靈活、更經濟,為用戶提供更高的供電質量和更優質的服務。
CPS 這個術語是2006 年由美國國家科學基金會提出,它描述了一系列復雜的、多學科的、具有物理感知能力的下一代工程系統,將嵌入式計算技術集成到物理世界中,如圖1所示。美國國家標準與技術研究所組建了一個專家小組,該小組將CPS 定義為由物理和計算元素共同設計的網絡形成的智能系統,而歐洲版本則強調了與云或網絡空間和人為因素的互動。在中國,CPS 是指集傳感、處理、智能、控制為一體的大規模、嵌入式、混合復雜系統。
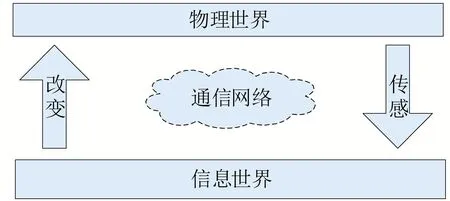
圖1 CPS框架
CPS 是計算過程和物理過程的集成,高度協調計算、通訊以及控制三者之間的關系,是一種新型智能系統。嵌入式設備負責監測和控制物理過程,而物理過程的結果則影響計算進程,通過反饋循環實現計算與物理世界的深度融合與實時交互。
1 電網信息物理系統
1.1 CPS層次結構
CPS 是運行在不同的時間和空間范圍的多閉環系統,而且感知、決策和控制執行子系統大多不在同一位置。邏輯上緊密耦合的基本功能單元依托于擁有強大計算資源和數據庫的網絡基礎設施(如Internet、數據庫、知識庫服務器和其他類型數據傳輸網絡等),構成了CPS 完整的體系結構,使我們能夠實現本地或者遠程監測和影響物理環境。
根據文獻[5]可將CPS 系統分為5 層:連接層、轉換層、網絡層、認知層和配置層。連接層主要負責連接機器及其組件,利用不同的設備或傳感器來獲取各種可靠的數據,并通過特定的協議實現數據傳輸;轉換層負責將收集到的數據轉換為有價值的信息,這一層賦予機器自我意識屬性;網絡層扮演著中心信息樞紐的角色,信息從每臺連接的機器被推送到這里,在收集了大量信息后,必須使用特定的分析來提取額外的信息,隨后再上傳到認知層;在認知層中,從網絡層獲取到的信息以一種適當的表示方法被提供給用戶以作出決策;配置層負責執行監督控制,使機器自配置和自適應,它作為彈性控制系統,將認知層上的決策對應的控制應用到機器上。
在學術界有不少研究CPS 體系結構的文章。文獻[6]基于控制循環結構并分析現實世界與信息世界的交互方式,提出了一種CPS 的原型體系結構。文獻[7]通過研究信息物理系統的安全目標與安全需求,提出了一種分層的信息物理系統安全體系結構。文獻[8]分析了事件的時間和空間特性,定義了一種新的CPS 體系結構,并為CPS開發了一個分層的時空事件模型。
1.2 GCPS概述
GCPS 是一種典型的信息物理融合系統,其包含的多種發電設施、輸配電網絡、用電設施以及儲備設施的綜合硬件電網系統作為開展核心,將最成熟的傳感技術、網絡傳輸技術、通信技術、自動化和智能管控技術綜合形成電網系統,其可以更好地實現實時監控和完全自動化,進而讓電力系統的運作更為穩定。
1.3 GCPS三層模型
基于CPS 理論,將GCPS 分為物理感知層、信息監測層和決策控制層,GCPS 的體系架構如圖2所示。

圖2 GCPS架構
1.3.1 物理感知層
信息采集、傳遞是信息系統的重要工作,通過無線傳感網絡可以滿足系統高度分散點的數據采集,采用分布式采集控制模式,按照區域和功能配置終端裝置。將獲取的參數信息與運行數據經過預處理后向數據中心匯總。此外,決策中心下達的控制指令與該層的執行器對應。信息安全也被認為是CPS 信息系統結構需要被嚴密考慮的方面。智能電網等信息物理系統在遭受信息系統故障時,應具有緊急更新和快速重構功能,其物理系統也需具備相當的抵御信息系統災難的能力。
1.3.2 信息監測層
該層負責數據的收集、可視化、分析,以及可能使用不同通信協議將數據傳輸到外部目的地。通過對物理感知層上送的數據的融合,并給予大規模分布式計算,將得到的知識提供給決策控制層,同時提供各GCPS 參與者之間的信息共享和協調機制。信息監測層更從數據分析中了解到電網的實時情況,便于進行事故預測與狀態評估,能夠更好地為決策控制層提供支撐。
1.3.3 決策控制層
該層提供電網系統的管理、執行和控制功能的模塊。基于從信息監測層獲取的數據和當前控制規則與系統模型,自動制定出適合的調控策略,并發送指令給物理感知層對電網設備進行控制,這個步驟亦可包括外部的輸入,如人為控制或天氣狀況。規則庫與系統模型會在知識挖掘中進行更新優化,從而更好地實現電網調控自動化的目的。
2 基于AADL的GCPS建模
2.1 AADL介紹
AADL 是于2004 年由專家委員會開發,由軟件工程研究所(software engineering institute,SEI)的Peter Feiler 擔任技術負責人,并由汽車工程師學會(society of automotive engineers,SAE)贊助。AADL支持軟件架構師和開發人員對實時和嵌入式計算機系統進行可預測的基于模型的工程設計。預期的應用領域包括汽車系統、航空電子和航天應用、醫療設備和工業設備。SAE AADL 標準由一種具有精確語義的語言組成,允許用戶定義軟件和硬件組件及其交互。
AADL是一種專門面向嵌入式實時系統開發的體系結構分析與設計語言。AADL的主要構件分為軟件構件、硬件構件和組合構件三大類。其中軟件構件包括程序、線程、子程序、數據等構件;硬件構建包括外部設備、處理器、存儲器、總線等構件;組合構件一般指系統構件,如圖3所示。
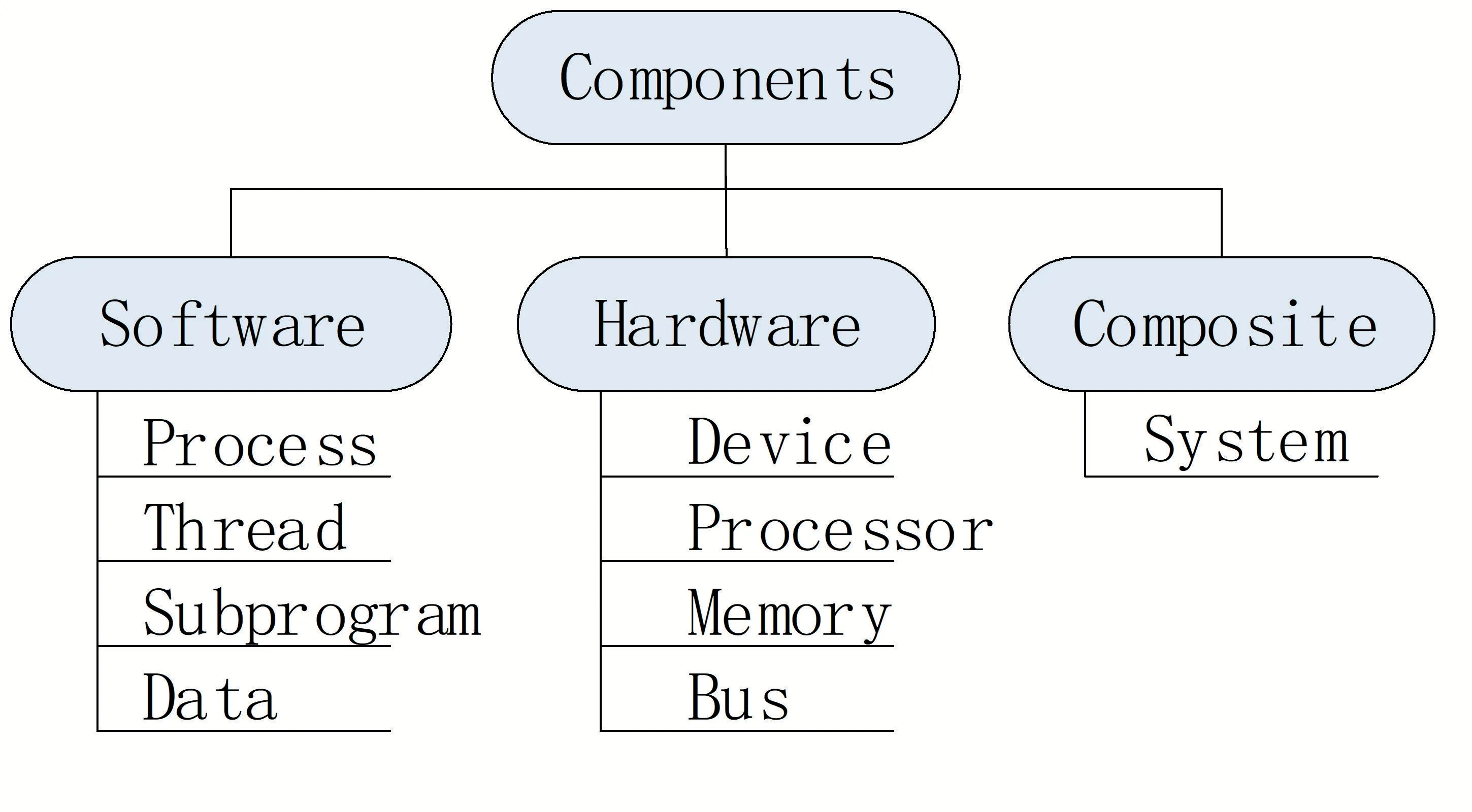
圖3 AADL構件組成
OSATE 2 是一個基于Eclipse 的建模框架,用于使用AADL。在這種環境中,軟件架構師可以設計和分析模型,然后生成部分實現代碼。OSATE 支持AADL 的文本和圖形表示。文本編輯器具有自動縮進、自動完成和語法高亮顯示功能。圖形編輯器允許設計師修改模型,并同步圖形和文本表示。
2.2 GCPS建模
本節使用OSATE 工具對1.3 所述的GCPS 體系結構進行建模,圖4為該系統圖形化模型。該GCPS 系統包含三個子系統,每個子系統都包含兩個部分:具有運算功能的應用平臺和具有操作功能的執行平臺,它們分別由若干軟件構件和硬件構建組成。部分代碼如下:
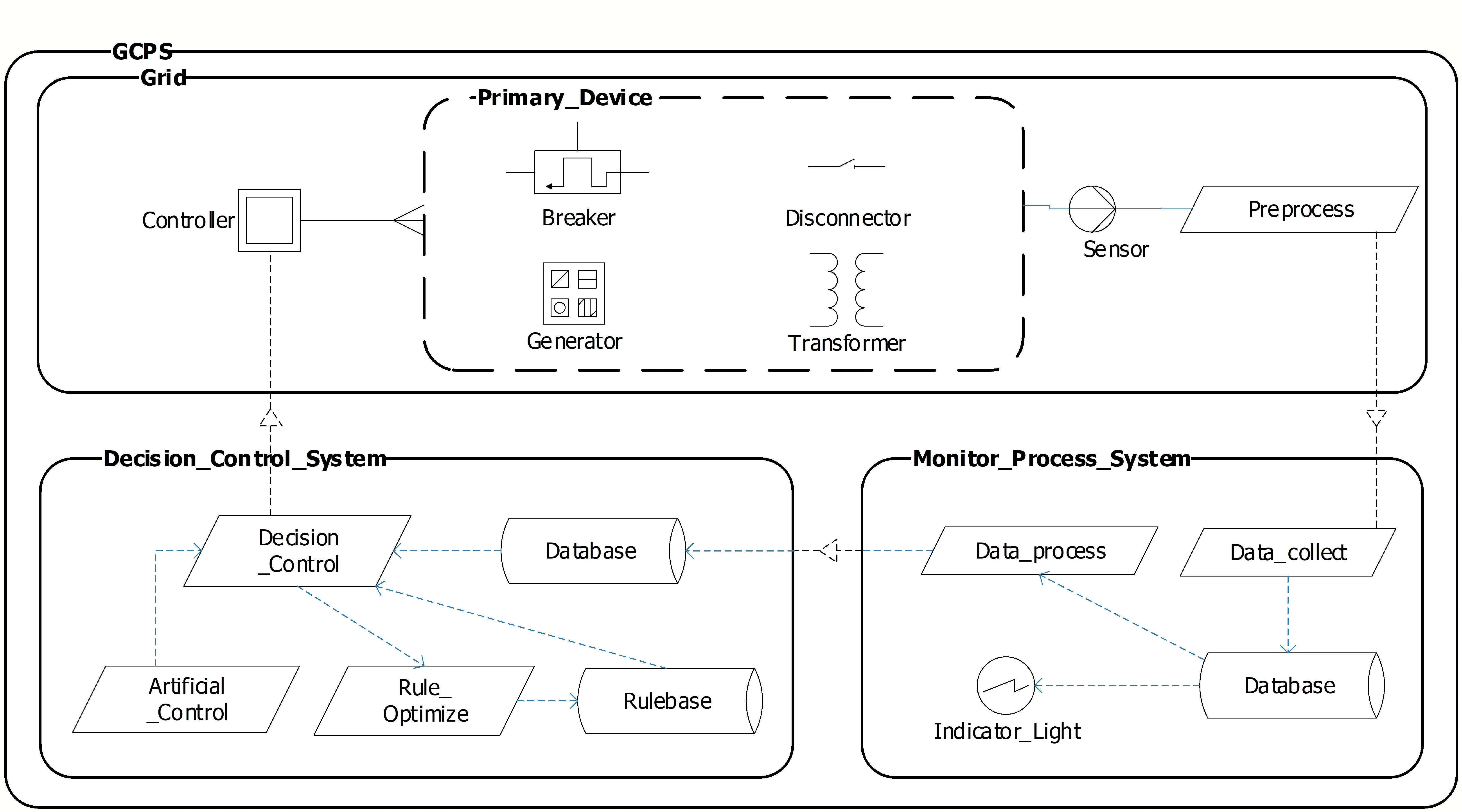
圖4 GCPS的AADL實現
system implementation grid.impl
subcomponents
sensor:device sensor.impl;
controller:device controller.impl;
preprocess:process data_preprocess.impl;
primary_device:abstract primary_device.impl;
connections
c0:port input_data->
controller.input_data;
c1:port controller.output_event->
primary_device.input_event;
c10:port primary_device.output_data->
sensor.input_data;
c11:port sensor.output_data->
preprocess.input_data;
c12:port preprocess.output_data->
output_data;
flows
ctl2sen:end to end flow
controller.ctl_source->primary_device.pri_flowpath
->sensor.sen_sink;
annex EMV2{**
use types ErrorLibrary,errorDef;
error propagations
input_data: in propagation{et_incorrectdata,et_nosignal};
end propagations;
properties
emv2::OccurrenceDistribution =>[ProbabilityValue=>3.5e-7;
Distribution=>Poisson;
]applies to input_data.et_incorrectdata;
emv2::OccurrenceDistribution =>[ProbabilityValue=>1.5e-6;
Distribution=>Poisson;
]applies to input_data.et_nosignal;
**};
end grid.impl;
2.3 子系統流分析驗證
在系統工程和需求工程中,非功能特性是一種需求,它規定了可用于判斷系統運行的標準,而不是具體行為。對于電力網來說,在面對突發情況時若系統能做到及時控制、調度,將可以大幅降低損失。由于設備間的通信存在延遲、設備內部計算模塊也有一定的耗時,因此需要對系統進行流延遲分析。AADL支持附件擴展,能夠很好地描述系統的非功能特性,并能使設計者在系統建模階段利用可調度分析、流分析測試等功能來改進系統。
圖5 展示了decision_control 進程構件內部的子進程,我們通過預設設備與組件的流延遲,并通過端對端的流延遲分析可以比較系統流的實際延遲與系統定義的延遲,從而判斷是否滿足需求。
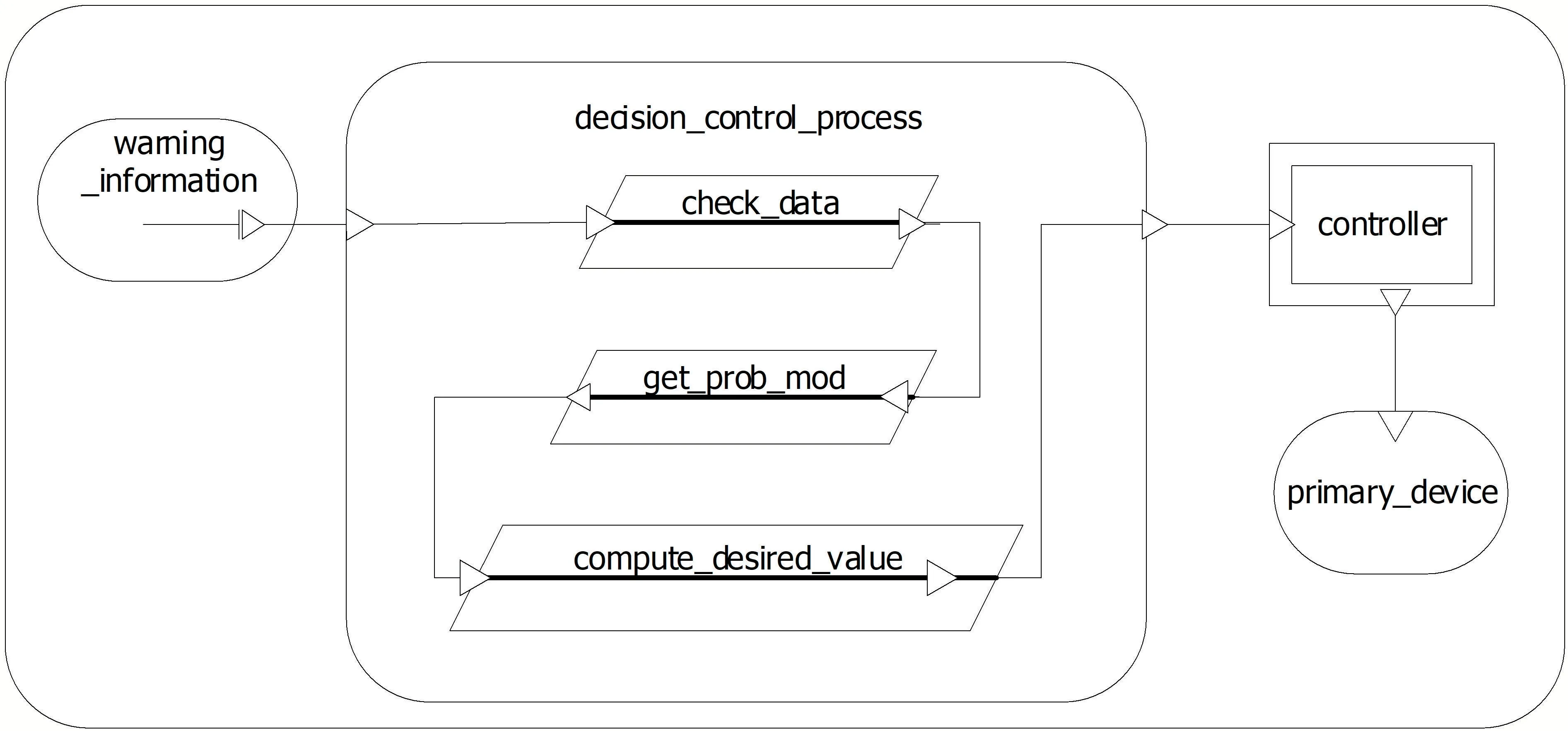
圖5 端對端流延遲分析
子系統的端對端流延遲聲明為:
flows
fs1:end to end flow
data_input.output_data_flow -> c1 -> decision_control_process.f1
->c2->controller.input_data_flow
{Latency=>800ms..1000ms;};
端對端流延遲分析結果見圖6,該子系統最小實際延遲為550 ms,小于預設最小延遲800 ms;最大實際延遲為750 ms,小于預設最大延遲1000 ms,因此滿足要求。

圖6 流延遲分析結果
AADL語言可用于計算信號流數據的端到端延遲和時間以及它們的抖動。AADL還可以將應用軟件映射到不同的硬件平臺上,并指定不同平臺上的執行時間范圍、截止日期以及指定數據流的預期延遲。因此,AADL模型可以構成分析框架的基礎,通過該框架,我們可以調查運行時系統對端到端延遲及其抖動的影響,并將這些結果與控制算法所做的假設進行比較。
3 結語
CPS 是一個龐大復雜的學科,涉及傳感技術、嵌入式技術、通信網絡技術等多種技術,CPS 將在未來工程系統的設計和開發中發揮重要作用。本文首先介紹了CPS 系統的相關概念、定義以及CPS 系統的相應特點,并結合傳統電網的特點,提出了GCPS 三層架構模型;最后,使用AADL 語言對系統中涉及到的各種構件進行建模,并對決策控制子系統的子進程進行了端對端的流延遲分析,驗證系統的可行性。
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
電子制作(2018年18期)2018-11-14 01:48:24
鐵道通信信號(2018年2期)2018-04-18 12:18:23
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
電鍍與環保(2016年3期)2017-01-20 08:15:32
山東工業技術(2016年15期)2016-12-01 05:31:22
中學生(2015年2期)2015-03-01 03:43:33
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
