便攜式微振動可視化測量儀的設(shè)計與實(shí)現(xiàn)
2022-09-07 00:40:52趙海嬌單明廣熊雪芬朱皓東鄧伊潔
宇航計測技術(shù) 2022年4期
趙海嬌,單明廣,熊雪芬,朱皓東,鄧伊潔
(哈爾濱工程大學(xué)信息與通信工程學(xué)院,哈爾濱 150001)
1 引 言
微振動廣泛存在于工業(yè)生產(chǎn)、精密設(shè)備加工制造和精密設(shè)備運(yùn)作等場景中,具有易被環(huán)境噪聲和系統(tǒng)噪聲影響,且難察覺、難測量、難測準(zhǔn)的特點(diǎn),對生產(chǎn)安全、加工精度和運(yùn)作效果都會產(chǎn)生重要影響,因此,對其進(jìn)行監(jiān)測與預(yù)防具有重要意義。
對于微振動的測量,當(dāng)前被廣泛使用的方法可分為接觸式法與非接觸式法。 其中,接觸式法主要使用基于不同原理傳感器的加速度計,包括壓電加速度計、應(yīng)變加速度計和微機(jī)電系統(tǒng)加速度計等;非接觸式法主要以激光多普勒測振方法為代表。 然而,在一些實(shí)際應(yīng)用場景中,以上方法都具有不同程度的局限性。 例如,精密儀器本身對外界的干擾很敏感,接觸式測量法要將傳感器探頭貼在被測物表面會產(chǎn)生負(fù)載效應(yīng);此外,該方法還存在只能進(jìn)行單點(diǎn)測量以及布線繁雜等問題。非接觸式的激光多普勒測振方法分為單點(diǎn)測量與掃描式測量,掃描式測量雖然可以進(jìn)行面測量,但測量速度慢、效率不高,且激光多普勒測振儀存在體積大、價格昂貴的問題;而視覺測量是非接觸式振動測量中的新興方法,代表性的有數(shù)字圖像相關(guān)法和光流法,但對微振動測量沒有針對性。
因此,本文研究了針對微振動的非接觸式視覺測量技術(shù),將相機(jī)作為信號采集設(shè)備,并提出基于盲源分離的灰度平均測量算法來提取振動信號。本方法測量結(jié)果與電測法和光測法只得到一串?dāng)?shù)據(jù)的形式不同,不僅能實(shí)現(xiàn)振動信息的準(zhǔn)確提取,還能實(shí)現(xiàn)對微振動的可視化。 在此基礎(chǔ)上,基于嵌入式開發(fā)平臺將測量系統(tǒng)集成化,研制了便攜式微振動可視化測量儀器,可為微振動測量提供新方案。
2 系統(tǒng)工作原理
基于視覺的振動測量系統(tǒng)由LED 光源、相機(jī)和計算機(jī)組成,如圖1 所示。 其中,LED 光源為被測物打光以提高成像質(zhì)量,減少成像系統(tǒng)的噪聲干擾;相機(jī)作為信息采集設(shè)備,采集振動物體視頻并保存;計算機(jī)用于數(shù)據(jù)處理,從相機(jī)傳輸?shù)膱D像數(shù)據(jù)中提取振動信號并將微振動可視化。

圖1 振動測量系統(tǒng)結(jié)構(gòu)Fig.1 Vibration measurement system structure
在測量過程中,光源發(fā)出的光照射在振動物體(被測物)上,而被測物反射的光信息被相機(jī)捕捉,形成包含振動信息的視頻幀傳送至計算機(jī),經(jīng)算法處理將微振動可視化后,提取振動信號并顯示。
3 可視化測量基本原理
微振動可視化測量算法分為頻率測量與視頻放大兩部分,分別實(shí)現(xiàn)振動信號提取和微振動可視化,如圖2 所示。 頻率測量包括信號提取區(qū)域選擇、灰度平均和ICA(Independent component analysis)盲源分離。 首先,信號提取區(qū)域由手動選擇,并在該區(qū)域內(nèi)隨機(jī)生成三個小區(qū)域,因為假定視頻中主要信號分為振動信號、強(qiáng)低頻噪聲干擾和其他嘈雜信號。 其次,分別對三個小區(qū)域作灰度平均,得到三個一維時域信號,灰度平均能有效提取區(qū)域內(nèi)信號,抑制噪聲干擾,具有較強(qiáng)魯棒性。 最后,將生成的三個一維信號組成觀察矩陣,通過ICA 盲源分離算法得到最終測量結(jié)果。 對于難以分辨的微振動使用視頻放大方法,在視覺上將其可視化,使測量過程更加直觀。
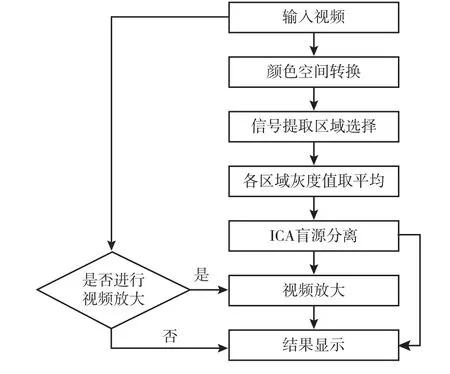
圖2 微振動可視化測量算法流程Fig.2 Algorithm flow of micro?vibration visual measurement
3.1 圖像灰度平均法
對于視頻中物體振動信號的提取,僅聚焦于一個像素位置的信息是不夠準(zhǔn)確的。 一方面振動區(qū)域由很多像素點(diǎn)組成,信噪比有高有低,而信噪比最高點(diǎn)的位置無法直接確定,隨意選取的點(diǎn)不能保證測量效果;另一方面微振動本身容易受到噪聲干擾,選取單個像素位置作為測量點(diǎn)魯棒性不強(qiáng)。 因此,振動信號的提取需要綜合振動區(qū)域內(nèi)像素點(diǎn)的信息,在這里對區(qū)域內(nèi)像素灰度值取平均值構(gòu)成綜合振動信號S(t)。
即
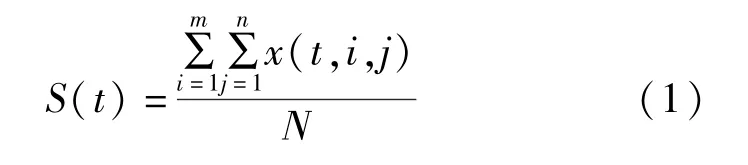
式中:x——每個像素點(diǎn)時域信號;t——采樣時刻點(diǎn),對應(yīng)時域信號時刻點(diǎn);i——像素點(diǎn)在圖像中所在的行數(shù);j——像素點(diǎn)在圖像中所在的列數(shù);m——圖像像素矩陣的行數(shù);n——圖像像素矩陣的列數(shù);N——每幀圖像像素總數(shù)。
假設(shè)手動選取的振動區(qū)域共有N 個像素點(diǎn),即N 個振動信號,這些信號由有用信號和噪聲混合而成,并且有用信號以頻率相同、幅值不同的形式存在。 為了直觀展示圖像灰度平均法的效果,對某一振動物體視頻進(jìn)行信號提取,如圖3 所示,1 號位置的紅色曲線代表平均后的綜合信號,其他曲線代表部分像素位置的局部信號,紅色曲線即其他曲線取平均后的結(jié)果。 可以觀察到,許多像素位置的信號信噪比極低,但經(jīng)過平均處理后的綜合信號呈現(xiàn)高信噪比狀態(tài)。
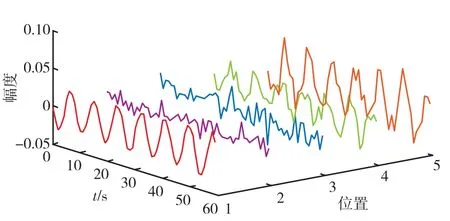
圖3 綜合信號與部分局部信號示意圖Fig.3 Schematic diagram of integrated signal and some local signals
3.2 ICA 盲源分離算法
ICA 即獨(dú)立成分分析,是隨盲源分析理論發(fā)展而來的一種獨(dú)立源信號提取算法。 假設(shè)有n 個獨(dú)立的信號源可以表示為:S =[s,s,…,s],通過一個混合矩陣A =[a,a,…,a]進(jìn)行混合得到觀測信號X =[x,x,…,x],即

在這里,三個子區(qū)域提取的時域信號即為已混合的信號,成分定義為振動信號、低頻環(huán)境噪聲和嘈雜的系統(tǒng)噪聲,因此n =3,X =[x,x,x]。
由公式(2)可知,觀測信號是已知的,混合矩陣和源信號是未知的。 假設(shè)混合矩陣是一個可逆矩陣,那么ICA 算法的本質(zhì)就是求解一個分離矩陣W,也就是混合矩陣的逆矩陣,來實(shí)現(xiàn)對觀測信號X的分離,得到分離信號Y,Y =[y,y,…y]。

因此,ICA 盲源分離算法的核心就是分離矩陣的求取,在源信號和混合矩陣未知的情況下,對觀測信號進(jìn)行預(yù)處理,包括中心化和白化,并通過設(shè)置的收斂條件不斷修正,得到最終的分離矩陣。
3.3 歐拉視頻放大方法
視頻放大算法具有放大視頻中微小運(yùn)動的作用,而歐拉視頻放大算法兼顧了效果和速度,其算法框圖如圖4 所示。 該算法主要包含四個步驟:(1)空間濾波將視頻序列分解為多空間分辨率的圖像;(2)時域濾波是對不同尺度圖像進(jìn)行頻域帶通濾波,得到目標(biāo)頻帶;(3)線性放大目標(biāo)頻帶信號,并加回原信號;(4)視頻重建是將經(jīng)過處理的多尺度圖像進(jìn)行金字塔重建,得到放大后的圖像,進(jìn)而輸出視頻。
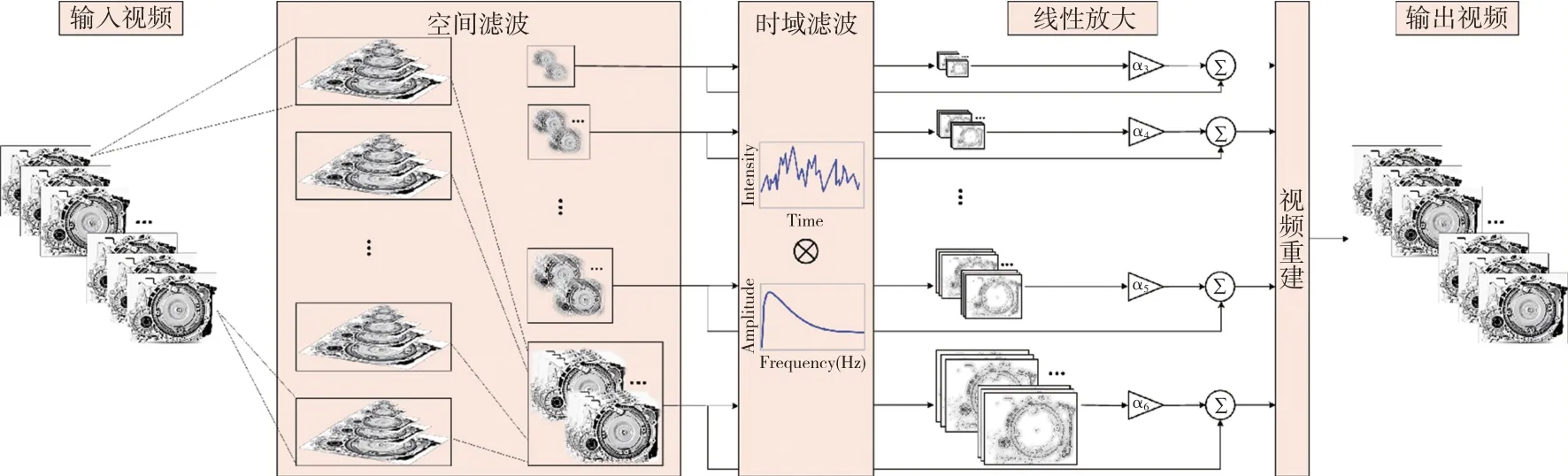
圖4 歐拉視頻放大算法框圖Fig.4 Flow chart of eulerian video magnification block diagram
運(yùn)動放大的實(shí)現(xiàn)過程可由一階泰勒展開式推導(dǎo)得出
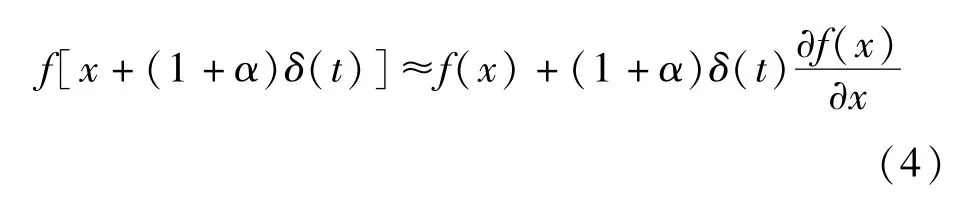
式中:α——放大倍數(shù);δ(t)——位移信號。
上述推導(dǎo)需要滿足文獻(xiàn)[15]中給出的指導(dǎo)性條件

式中:λ——圖像的空間波長。
4 便攜式系統(tǒng)設(shè)計與實(shí)現(xiàn)
便攜式系統(tǒng)基于RK3399 芯片進(jìn)行開發(fā),使用C++編程語言,根據(jù)功能需求完成軟件設(shè)計,外接相機(jī)等輸入設(shè)備和顯示屏等輸出設(shè)備,具有結(jié)構(gòu)緊湊、操作便捷的特點(diǎn)。
4.1 硬件設(shè)計與實(shí)現(xiàn)
硬件系統(tǒng)由數(shù)據(jù)處理模塊、輸入模塊、輸出模塊和供電模塊組成,如圖5 所示。 數(shù)據(jù)處理模塊為big.LITTLE 核心架構(gòu)的RK3399 芯片,負(fù)責(zé)測量過程中所有數(shù)據(jù)的計算與交換;輸入模塊包括觸控設(shè)備和攝像頭,負(fù)責(zé)功能觸發(fā)與視頻采集,其中攝像頭模塊選用標(biāo)準(zhǔn)UVC 協(xié)議的CMOS 攝像頭模組,支持60 幀640 P 視頻采集,同時在RK3399 平臺上滿足60 幀穩(wěn)定采集不掉幀;輸出模塊為顯示屏,負(fù)責(zé)顯示功能界面和數(shù)據(jù)處理結(jié)果;供電模塊負(fù)責(zé)同時給數(shù)據(jù)處理模塊與顯示屏供電。 以上模塊結(jié)構(gòu)緊湊,便于集成,達(dá)到了操作便捷的目的。
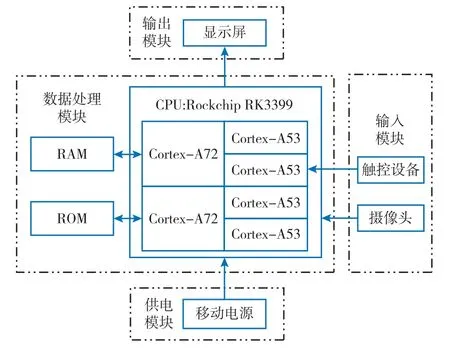
圖5 硬件系統(tǒng)組成圖Fig.5 Hardware system composition diagram
4.2 軟件設(shè)計與實(shí)現(xiàn)
軟件系統(tǒng)主要包括三個模塊:管理硬件設(shè)備、調(diào)用應(yīng)用程序及控制整體工作過程的主模塊,頻率測量子模塊和微振動可視化子模塊。 軟件設(shè)計流程如圖6 所示,主模塊對硬件設(shè)備進(jìn)行初始化,對輸入信息或指令進(jìn)行初步判斷并將數(shù)據(jù)傳輸給應(yīng)用程序進(jìn)一步處理,將需要輸出的數(shù)據(jù)通過硬件輸出設(shè)備展示,以及進(jìn)行子模塊之間的數(shù)據(jù)溝通;頻率測量模塊主要通過執(zhí)行灰度平均、盲源分離、傅里葉變換等算法實(shí)現(xiàn)對振動的測量;微振動可視化模塊在判斷是否需要視頻放大后選擇性啟動,實(shí)現(xiàn)對微幅振動的放大與顯示。
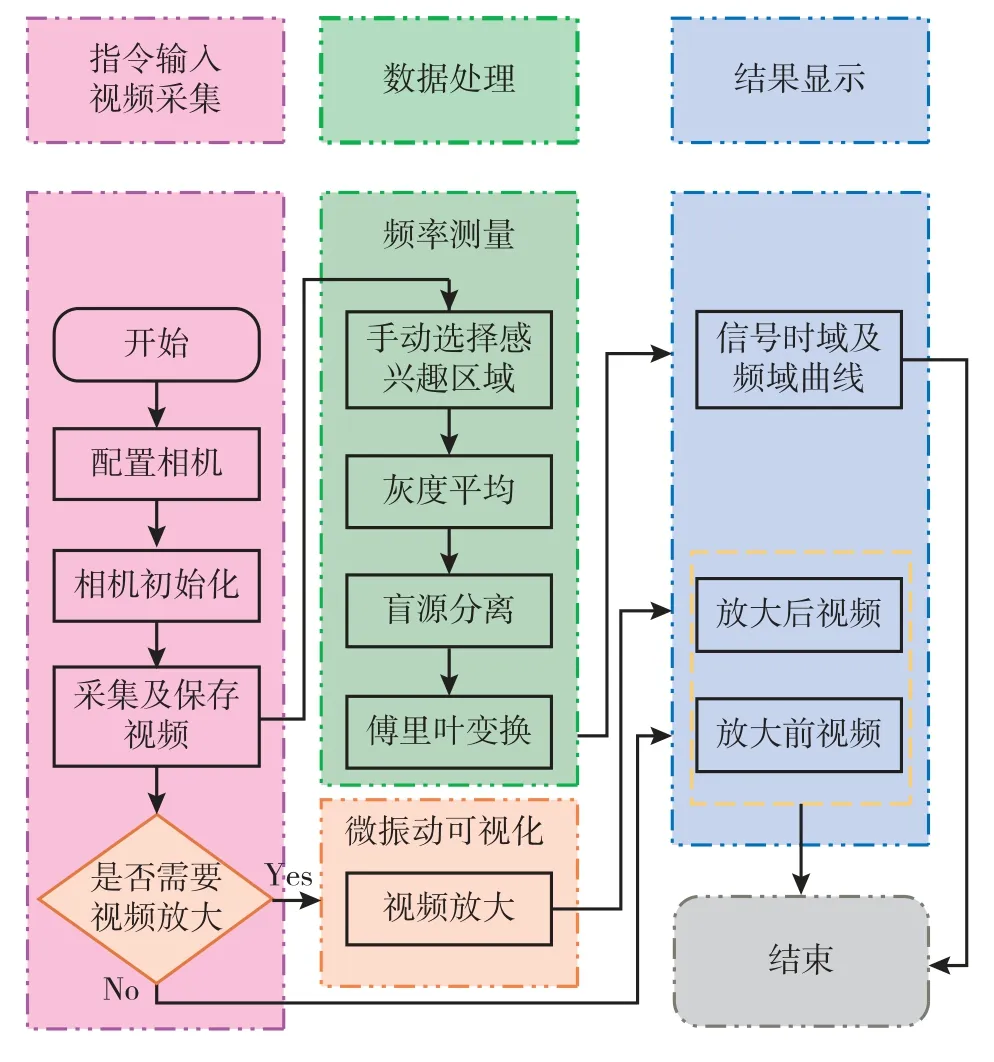
圖6 軟件設(shè)計流程圖Fig.6 Software design flow chart
根據(jù)算法流程與功能要求,使用C++實(shí)現(xiàn)系統(tǒng)軟件設(shè)計,軟件集合了參數(shù)設(shè)置、功能調(diào)用和結(jié)果顯示等功能,所有操作一站式完成。
4.3 系統(tǒng)功能驗證
硬件和軟件集成形成便攜式振動測量系統(tǒng),如圖7 所示。 設(shè)計了懸臂梁振動測量試驗以驗證軟硬件集成后的儀器性能。 振動測量系統(tǒng)對懸臂梁的視頻采集、數(shù)據(jù)處理和結(jié)果顯示一站式完成。
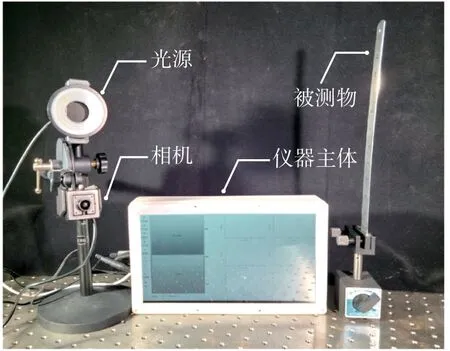
圖7 便攜式振動測量系統(tǒng)Fig.7 Portable vibration measurement system
懸臂梁振動的頻率與其懸空的長度相關(guān),長度越長,頻率越低,并且長度固定,頻率也固定,這是由鋼制懸臂梁固有特性決定的。 輕輕撥動并等待其振動幅度下降到肉眼難以觀察的程度時開始測量。 與此同時,為驗證測量的準(zhǔn)確性,使用加速度計對振動的懸臂梁同時進(jìn)行測量,加速度計傳感器探頭粘貼于懸臂梁表面。
如圖8 所示,傳感器測量結(jié)果為5.510 Hz,本系統(tǒng)測量結(jié)果為5.512 Hz,相對誤差為0.04%,二者測量結(jié)果基本吻合,微振動可視化效果良好,驗證了儀器的各項功能。
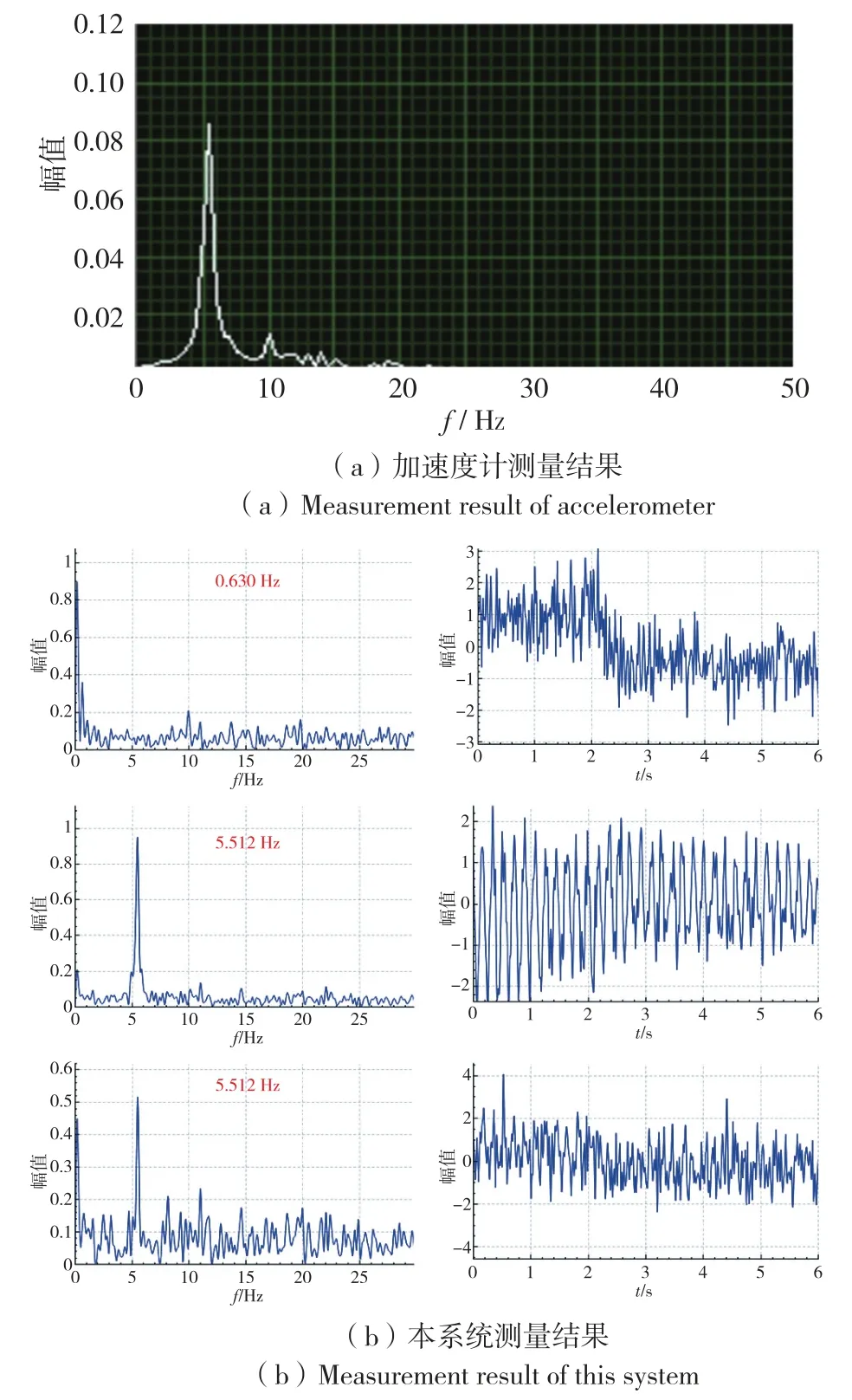
圖8 懸臂梁振動測量結(jié)果Fig.8 Cantilever beam vibration measurement results
5 試驗與分析
為進(jìn)一步展示儀器的測量過程及優(yōu)越性,對懸臂梁振動測量試驗與水杯晃動測量試驗進(jìn)行分析。其中,懸臂梁振動測量試驗通過分步敘述展現(xiàn)測量過程與效果。
5.1 懸臂梁振動測量試驗
儀器測量的主要過程包括灰度平均、盲源分離和視頻放大,懸臂梁測量步驟為:
第一步,如圖9(a)所示,在懸臂梁視頻畫面中選擇測量區(qū)域,并隨機(jī)生成三個小區(qū)域進(jìn)行灰度平均計算。
第二步,將三個區(qū)域灰度平均結(jié)果組成觀察矩陣進(jìn)行盲源分離,得到一個振動信號和兩個噪聲成分,其中振動信號頻率為21.67 Hz,結(jié)果如圖9(b)所示。
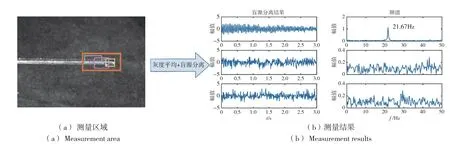
圖9 測量區(qū)域選擇與測量結(jié)果Fig.9 Measurement area selection and measurement results
第三步,通過視頻放大實(shí)現(xiàn)微振動可視化,懸臂梁振動幅度在視覺上得到放大,便于試驗者觀察。
5.2 水杯晃動測量試驗
容器在外力作用下產(chǎn)生搖晃,內(nèi)部的液體就會產(chǎn)生晃動,并且在短時間內(nèi)振幅逐漸降低至零。 對于這類晃動頻率的測量,工業(yè)生產(chǎn)中一般采用激光位移傳感器,但由于大多數(shù)液體具有良好的透射性,為了增強(qiáng)激光的反射信號,會在待測容器里撒入水粉顏料等物質(zhì),這可能會破壞被測物,造成諸多不便。 所設(shè)計的測量儀器屬于非接觸式測量,較好地解決了這一問題。
如圖10 所示,測量結(jié)果中時域波形呈現(xiàn)出幅度較快衰減至零的趨勢,并且測得液體晃動頻率結(jié)果為3.735 Hz。
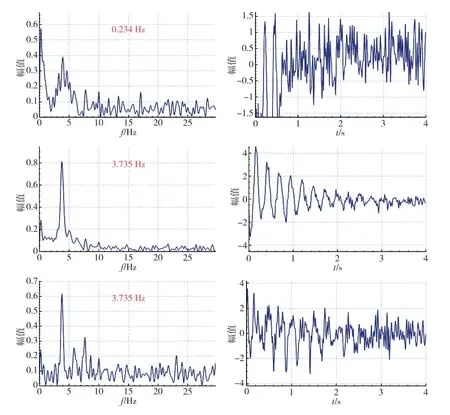
圖10 液體晃動頻率測量結(jié)果Fig.10 Screenshot of liquid sloshing frequency measurement results
6 結(jié)束語
設(shè)計了一款便攜式微振動可視化測量儀,通過試驗驗證,微振動可視化效果良好,頻率測量結(jié)果與加速度計比對誤差在0.5%以內(nèi),保持較好的準(zhǔn)確度。 根據(jù)相機(jī)與被測物之間的距離大小和相機(jī)的可用分辨率,振動幅度的測量范圍在圖像中可達(dá)亞像素級別,對應(yīng)可測量的物理幅度可在微米到幾毫米之內(nèi)調(diào)整。 該測量系統(tǒng)可實(shí)現(xiàn)基本的振動測量功能,為振動監(jiān)測與防范領(lǐng)域帶來新的選擇,但因相機(jī)幀率較低,在奈奎斯特采樣定律的限制下只能對30 Hz 以下振動物體進(jìn)行測量,在未來將聚焦于數(shù)據(jù)處理內(nèi)核的升級以及欠采樣測量算法的研究,最終實(shí)現(xiàn)對高頻振動物體的測量。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
海洋信息技術(shù)與應(yīng)用(2020年1期)2020-06-11 12:43:56
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
傳媒評論(2019年4期)2019-07-13 05:49:14
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40