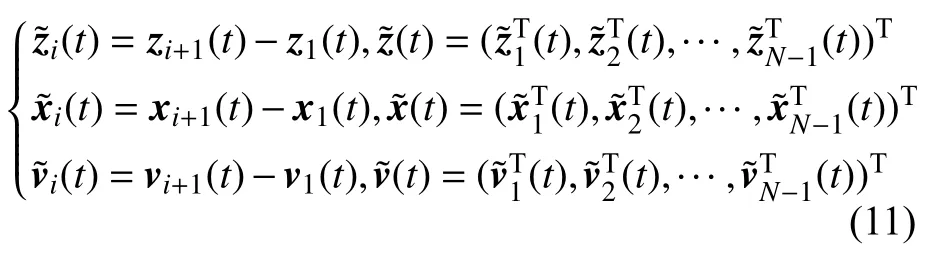
基于分布式PI 的2 階時延多智能體系統一致性控制
2022-09-07 04:05:18張安通強以銘
水下無人系統學報 2022年4期
王 琦 ,郭 飛 ,張安通 ,郭 煜 ,強以銘
(1.中國船舶科學研究中心,江蘇 無錫,214082;2.深海技術科學太湖實驗室,江蘇 無錫,214082;3.上海機電工程研究所,上海,201109)
0 引言
隨著自動控制技術和人工智能技術的快速發展,多智能體系統受到了越來越多研究者們的關注,也逐漸成為人工智能領域的研究熱點。多智能體系統由一定數量的智能體構成,通過智能體間的相互協同完成共同的任務。多智能體系統不僅可以提高工作效率,而且易于拓展,可靠性高,在無人艇集群水上作業、無人機空中編隊控制、衛星組網通信以及多機器人合作等領域應用廣泛。其中,多智能體系統的一致性是指各智能體的狀態最終趨于一個相同的值,也是多智能體系統研究中的關鍵問題[1-6]。
由于通信帶寬是有限的,在實際多智能體系統中總是不可避免地存在時延。針對含有時延的多智能體系統,研究者們也進行了相應的研究。通過采用時域的方法,張慶杰等[7]針對具有通信時延的2 階多智能體系統的平均一致性問題,構造Lyapunov-Krasovskii 泛函得到了系統穩定判據,并引入了自由權矩陣來降低保守性,通過求解線性矩陣不等式(linear matrix inequality,LMI)獲得最大的時滯上界。通過采用頻域的方法,楊洪勇等[8]針對具有通信和輸入時延的含領導者的多智能體系統,運用頻域控制理論和Nyquist 穩定性定理,給出了只和輸入時延相關的一致性條件。Park 等[9]針對具有通信時延和干擾的離散時間的多智能體系統提出了一種新型一致性算法。Savino 等[10]研究了在切換拓撲結構下具有時變時延的多智能體系統的一致性問題,采用具有不確定轉換率的馬爾可夫跳變對拓撲變化進行建模。Kaviarasan等[11]研究了存在概率時變時延的不確定非線性多智能體系統的一致性問題,將概率時變時延等價轉換為具有隨機參數的確定性時變時延。Tan 等[12]針對一類具有時滯的離散時間異構多智能體系統的一致性問題,提出了一種預測方案,通過使用接收到的智能體的過時信息來主動補償延遲,并設計了一種具有狀態預測功能的新型分布式協議,給出了系統達到一致的必要和/或充分條件。Ji 等[13]研究了異構多智能體系統在輸入時延影響下的一致性問題,設計的一致性協議考慮了智能體之間的共存合作和競爭互動關系,給出的結論表明系統一致性的實現與系統控制參數、代理的度數和輸入時間延遲有關。
針對多智能體系統外部有擾動的情況,相關學者也進行了大量的研究。Mondal 等[14]針對異構高階非線性多智能體系統提出了一種魯棒的一致性控制器,提出了一種基于有限時間擾動觀測器和滑模控制的分布式一致性協議。Elahi 等[15]針對有外部干擾、通信時延和隨機丟包的離散時間多智能體系統進行了分布式一致性控制,以線性矩陣不等式給出了充分條件。Ramya 等[16]通過使用基于干擾抑制和Smith 預測方案的反饋控制器設計了一種新型的一致性控制策略以解決多智能體系統的魯棒一致性問題。王和等[17]針對2 階多智能體系統的一致性問題,考慮了在有向通信拓撲結構下存在不匹配擾動的情況,還考慮了有領導者跟蹤一致性問題以及無領導者一致性問題。姚輝等[18]研究了在有障礙物和外部擾動的情況下多智能體系統的編隊跟蹤和避障問題,設計了基于目標跟蹤優先級的持續跟蹤控制策略,以及基于人工勢場法的避障控制協議,并根據自抗擾理論設計包含擾動補償項的編隊跟蹤控制器;研究了2 階多智能體系統的編隊問題,采用自抗擾理論和一致性方法提出了包含擾動補償項的編隊跟蹤控制協議,并給出了充分條件[19]。葛志文等[20]研究了存在外部擾動和執行器故障的多智能體系統的容錯一致性算法,提出了一種基于自適應滑模的算法,相比傳統算法,其誤差收斂速度更快,容錯控制效果更好。
上述研究分別針對具有通信時延和擾動的多智能體系統進行研究,給出了系統實現一致性的條件,但是在實際應用中,可能同時存在通信時延和擾動的影響。Dong 等[21]研究了具有一般線性動力學特性和切換有向拓撲結構的多智能體系統的時變編隊分析和設計問題。Yu 等[22]針對高階多智能體系統的魯棒H∞編隊跟蹤問題,同時考慮了具有外部干擾和時變時延,其中編隊可以通過指定的分段連續可微向量來定義。
同時,由于比例-積分-微分(proportionalintegral-derivative,PID)控制器研究較為成熟,具有諸多優點,因此有研究者將PID 應用到了一致性控制協議中。Lombana 等[23]分別針對同構和異構系統的一致性問題,使用適當的狀態轉換和Lypunov函數證明了2 種情況下控制策略的收斂性。李浩亮等[24]針對線性多智能體系統一致性問題,提出分布式PID 控制協議,證明了系統的一致性與增益矩陣和PID 參數有關。但以上文獻都沒有考慮通信時延和擾動對系統一致性的影響,工程應用性不強。基于以上文獻,針對含有通信時延和擾動的2 階多智能體系統,文中提出了一種基于分布式PI 的控制協議,運用圖論、矩陣論和李雅普諾夫穩定性理論的知識,構造具有三重積分項的Lyapunov-Krasovskii 泛函,給出了系統實現漸近穩定的充分條件,降低保守性,最后通過仿真驗證了該控制協議的正確性和有效性。
1 問題描述
為了方便描述多智能體系統,引入圖論。多智能體系統可以用圖論描述為G=(V,E,A),其中:V={1,2,···,N}為一系列節點,表示多智能體系統中的每個智能體;E?V×V為每個智能體之間的有向邊,表示為eij=(i,j),其中i是j的父節點,j是i的子節點;A=(aij)N×N表示鄰接矩陣,當且僅當有向邊eji=(j,i)∈E時,aij=1,否則,aij=0。Ni={j∈V,(j,i)∈E}稱為節點i的鄰居集。圖論G的拉普拉斯矩陣L=(lij)N×N定義為
在實際工程應用中,如多無人艇/機編隊、機器人協同作業等都可以看作是2 階多智能體系統。該系統由N個智能體構成,每個智能體的動態特性為

式中
分別表示第i個智能體的位置狀態、速度狀態、控制協議和非零擾動,n為狀態向量的維數,且wi(t)∈L2[0,∞)。
定義1:對任意初始狀態值,當且僅當下式滿足:
那么含擾動的2 階多智能體系統(2)達到了一致性。
假設1:對于2 階含擾動的多智能體系統(2),假設各智能體間的通信拓撲結構G包含一個有向生成樹。
在給出主要結論之前,首先給出2 個矩陣論中的引理。
引理1:對于任意常正定矩陣M和標量τ>0,滿足不等式

引理2:對于任意常正定矩陣M和標量τ>0,滿足不等式
2 主要理論
為了實現該多智能體系統的一致性,根據智能體自身及其鄰居狀態設計的分布式PI 控制協議為
式中:α,β,ki為控制參數;τ (t)為時延。
同時考慮常數時延和時變時延2 種情況。首先考慮時延為常數的情況,即0<τ(t)=τ ≤d,d為時延的上界。
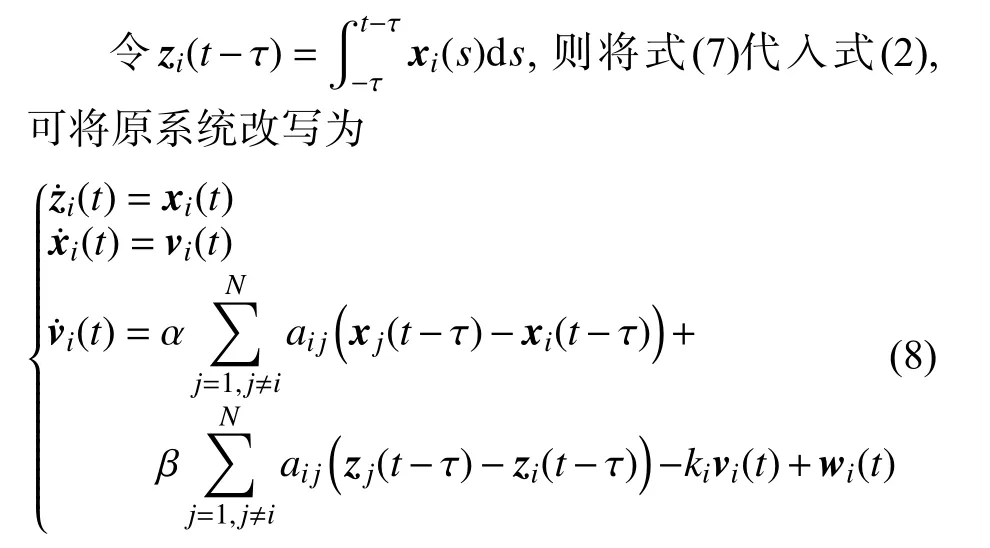
令
則式(8)可寫成
其中,L為2 階多智能體系統(2)的拉普拉斯矩陣。
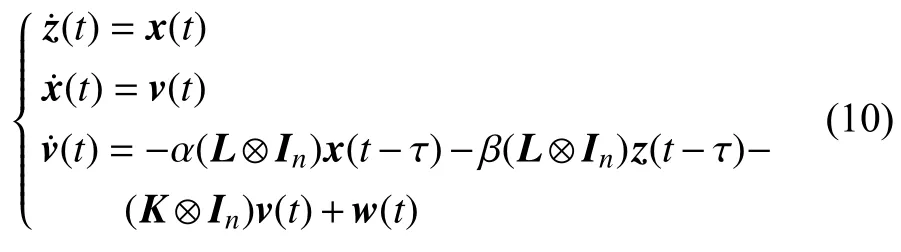
令
則可以得到
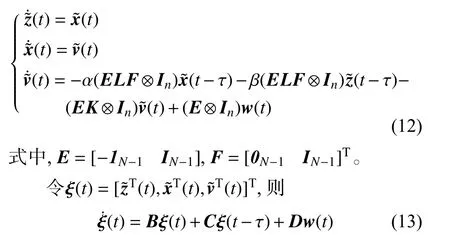
其中,
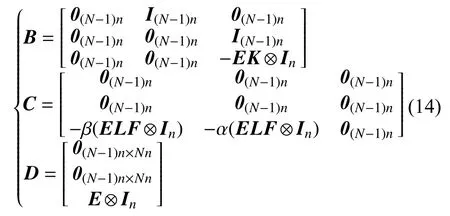
如果隨著時間的推移limt→∞ξ(t)=0,也就是limt→∞(zi+1(t)?z1(t))=0,limt→∞(xi+1(t)?x1(t))=0,limt→∞(vi+1(t)?v1(t))=0,i=1,2,···,N?1,可以得到z1(t)=z2(t)=···=zN(t),x1(t)=x2(t)=···=xN(t),v1(t)=v2(t)=···=vN(t),即多智能體系統實現了一致性,將原多智能體系統(2)的一致性問題轉換為了誤差系統(13)的穩定性問題。
定理1:在假設1 滿足的條件下,采用控制協議(7),其中時滯為常數0<τ ≤d,如果存在正定矩陣P,Q,R和W,滿足下面的線性矩陣不等式
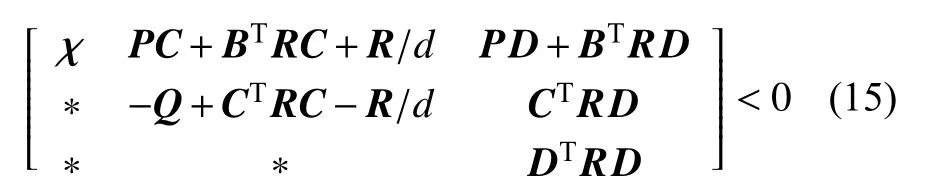
式中,χ=BTP+PB+Q+BTRB?R/d。那么2 階含擾動常數時延多智能體系統(2)能夠實現一致性。
證明:針對轉換后的系統(13)構造Lyapunov-Krasovskii 候選泛函

式中
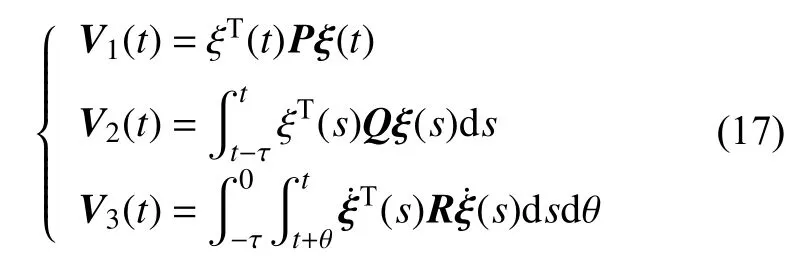
由于P,Q,R可知,構造的Lyapunov-Krasovskii候選泛函是正定的,即V(x)>0。
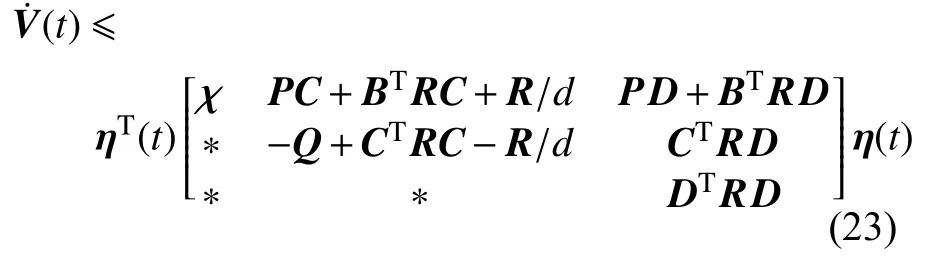
對其求導可得
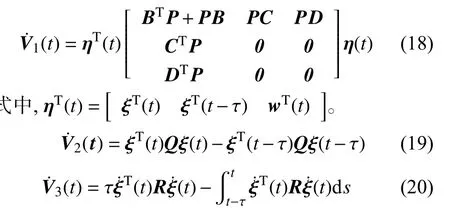
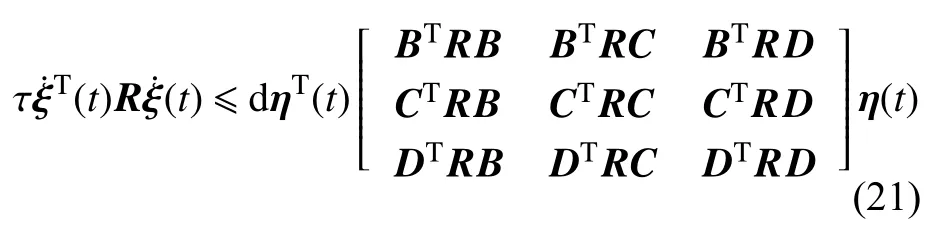
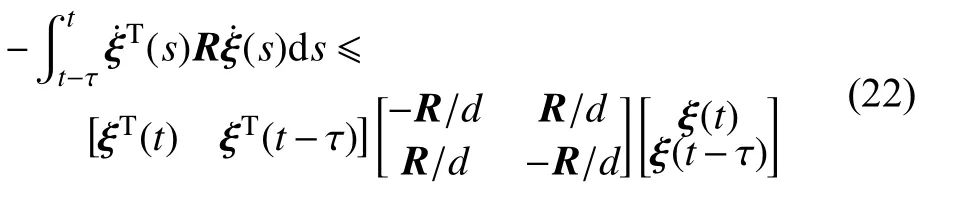
整合式(18)~式(22),可得
接著,考慮時延為時變的情況,時變時延τ(t)滿 足0<τ(t)≤d,≤d1<1,令xi(s)ds,則將控制協議(7)代入系統方程(2),通過類似的降階變換可將原系統轉換為

式中,B,C,D,ξ 的定義和式(13)一致,可得到推論1。
推論1:在假設1 滿足的條件下,采用控制協議(7),其中時變時滯0<τ(t)≤d,≤d1<1,如果存在P,Q和R,滿足下面的線性矩陣不等式
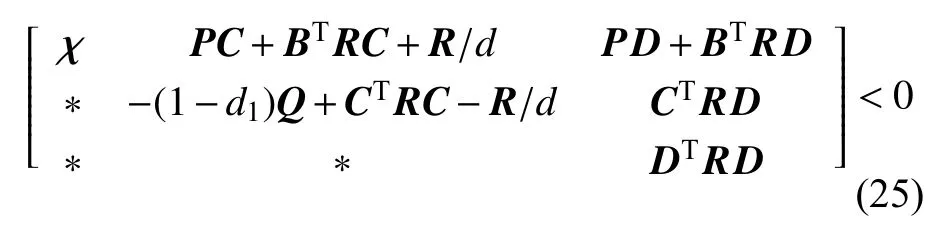
式中,χ=BTP+PB+Q+BTRB?R/d。那么2 階含擾動時變時延多智能體系統(2)能夠實現一致性。
證明:與定理1 的證明類似,在此不再贅述。
在定理1 和推論1 的證明過程中,構造的Lyapunov-Krasovskii 泛函包含了一重積分和二重積分項,如果在Lyapunov-Krasovskii 泛函中加入三重積分項,可以降低系統的保守性,進而得到定理2。
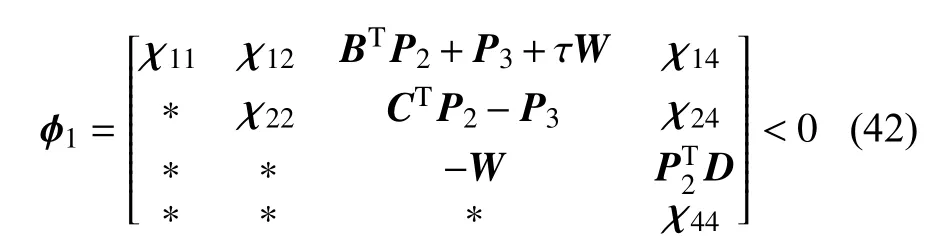
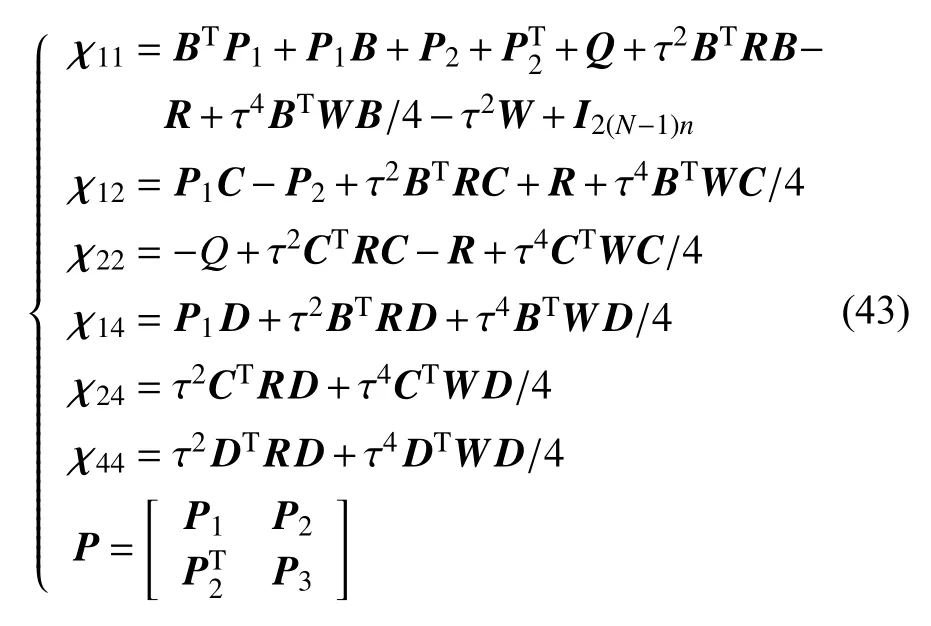
定理2:在假設1 滿足的條件下,采用控制協議(7),其中時滯為常數τ,如果存在P,Q,R和W,滿足下面的線性矩陣不等式
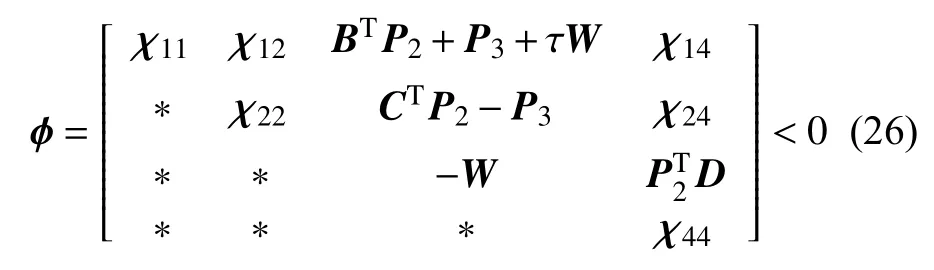
其中
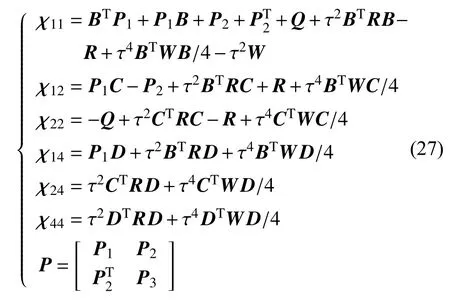
那么2 階含擾動常數時延多智能體系統(2)能夠實現一致性。
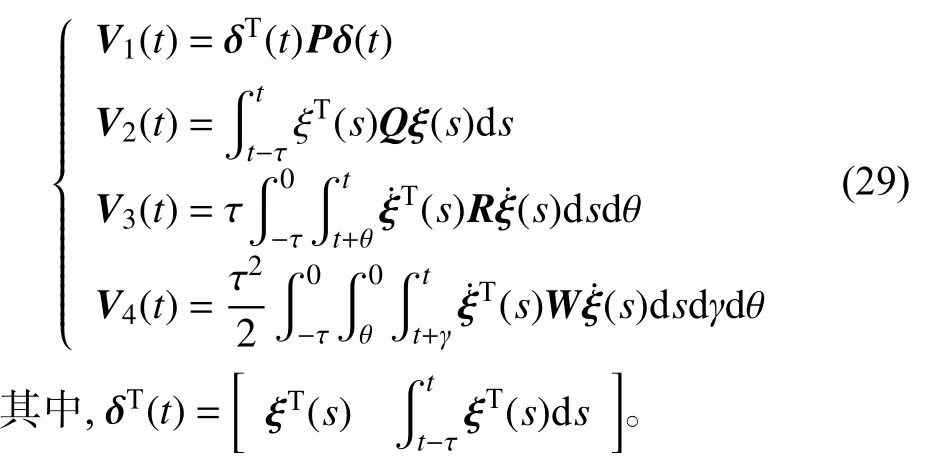
證明:針對轉化后的系統(13)構造Lyapunov-Krasovskii 候選泛函

式中
由P,Q,R,W可得構造的Lyapunov-Krasovskii候選泛函為正定,即V(x)>0。對其求導可得

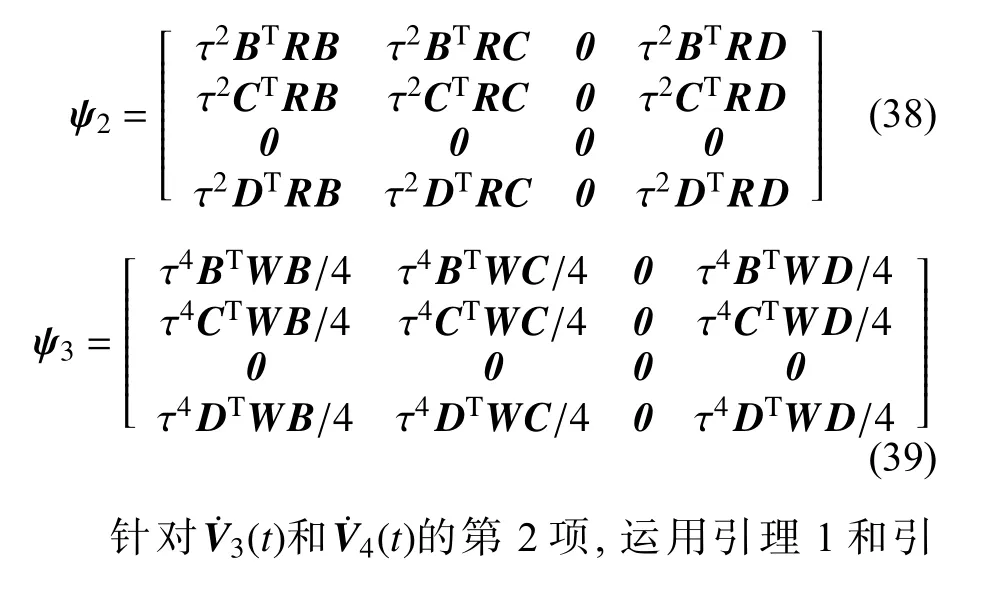
其中
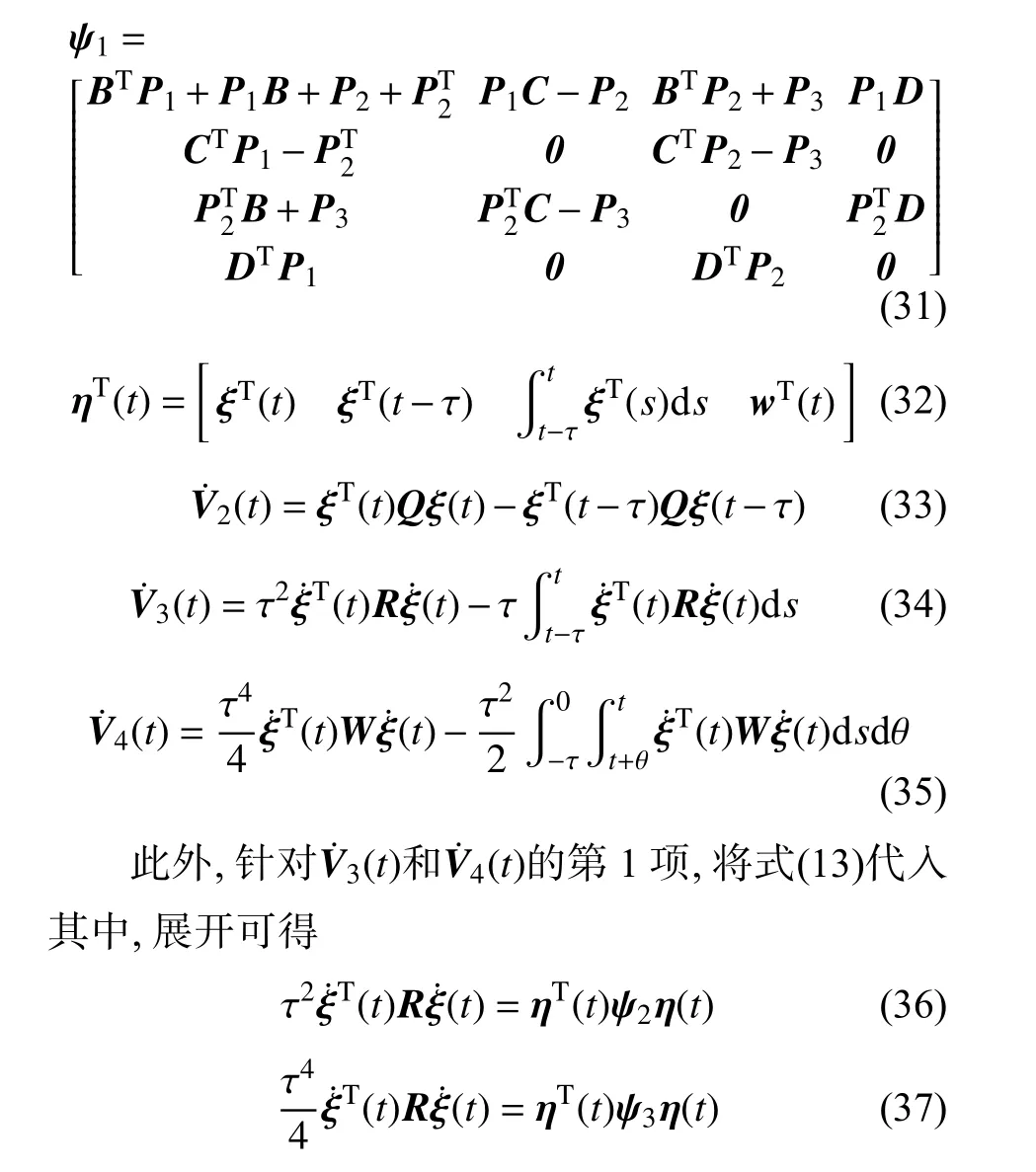
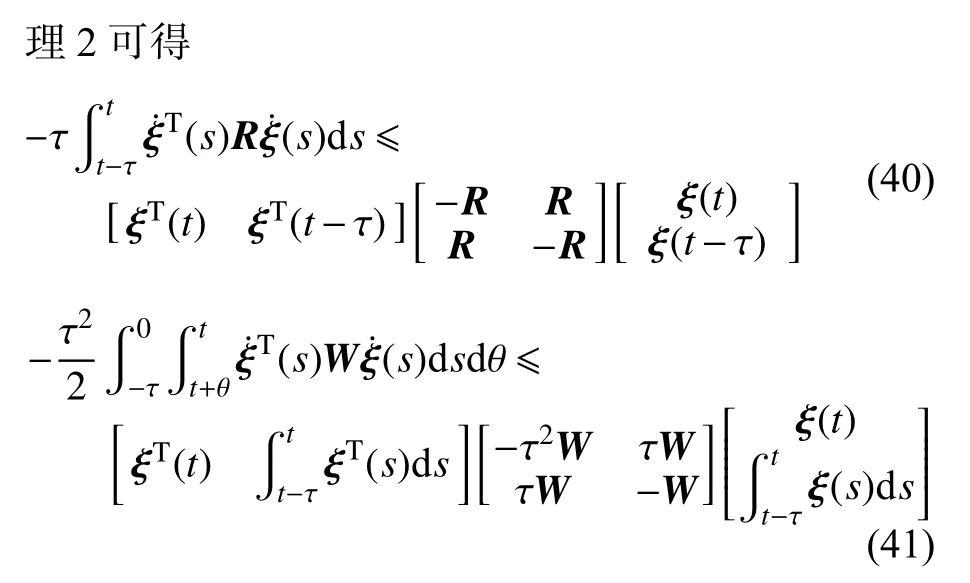
其中
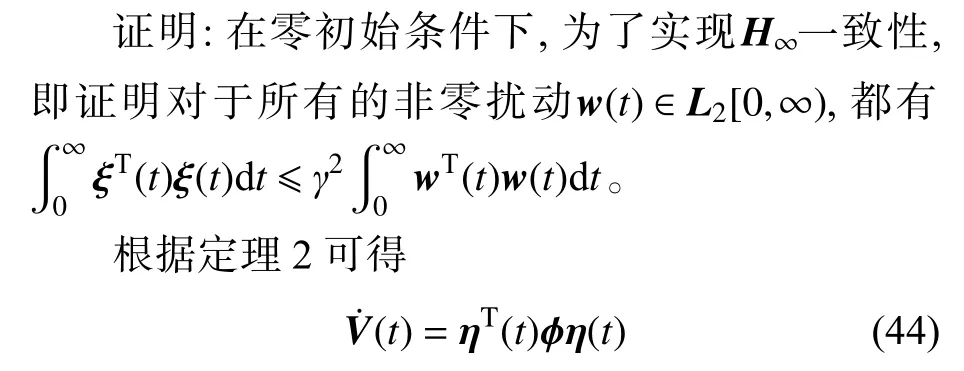
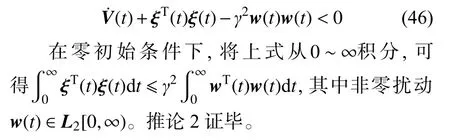
為了實現系統的H∞一致性,即系統漸近達到一致性,且存在一個常數γ>0,使得在任意初始條件下,對于所有的非零擾動w(t)∈L2[0,∞),都有可得到推論2。
推論2:在假設1 滿足的條件下,采用控制協議(7),其中時滯為常數τ,如果存在P,Q,R和W滿足下面的線性矩陣不等式
其中,
那么2 階含擾動常數時滯多智能體系統(2)能夠實現H∞一致性。
那么

當滿足?1<0時,可得
3 數值仿真
考慮通信拓撲結構如圖1 所示的多智能體系統,系統中有6 個智能體,編號為1~6,從圖1 中可以看出,該拓撲結構含有一個有向生成樹,其中節點1 為根節點,從節點1 到其他任意一個節點均有一條有向路徑,滿足假設條件1。
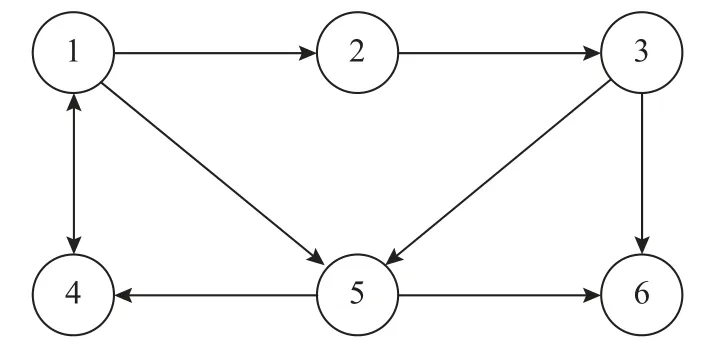
圖1 多智能體系統通信拓撲結構圖Fig.1 The communication topology graph of the multiagent system
該系統的外部擾動為
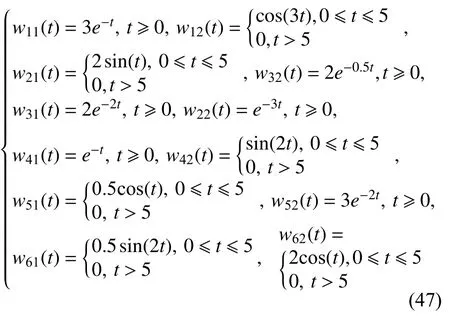
選擇參數α=1,β=2,給定時變時延為τ(t)=0.02|cos10t|,運用定理2,通過Matlab 中的LMI 工具箱求得可行解P,Q,R和W,并畫出系統中各智能體的狀態曲線xi1(t),xi2(t),vi1(t),vi2(t),如圖2所示。
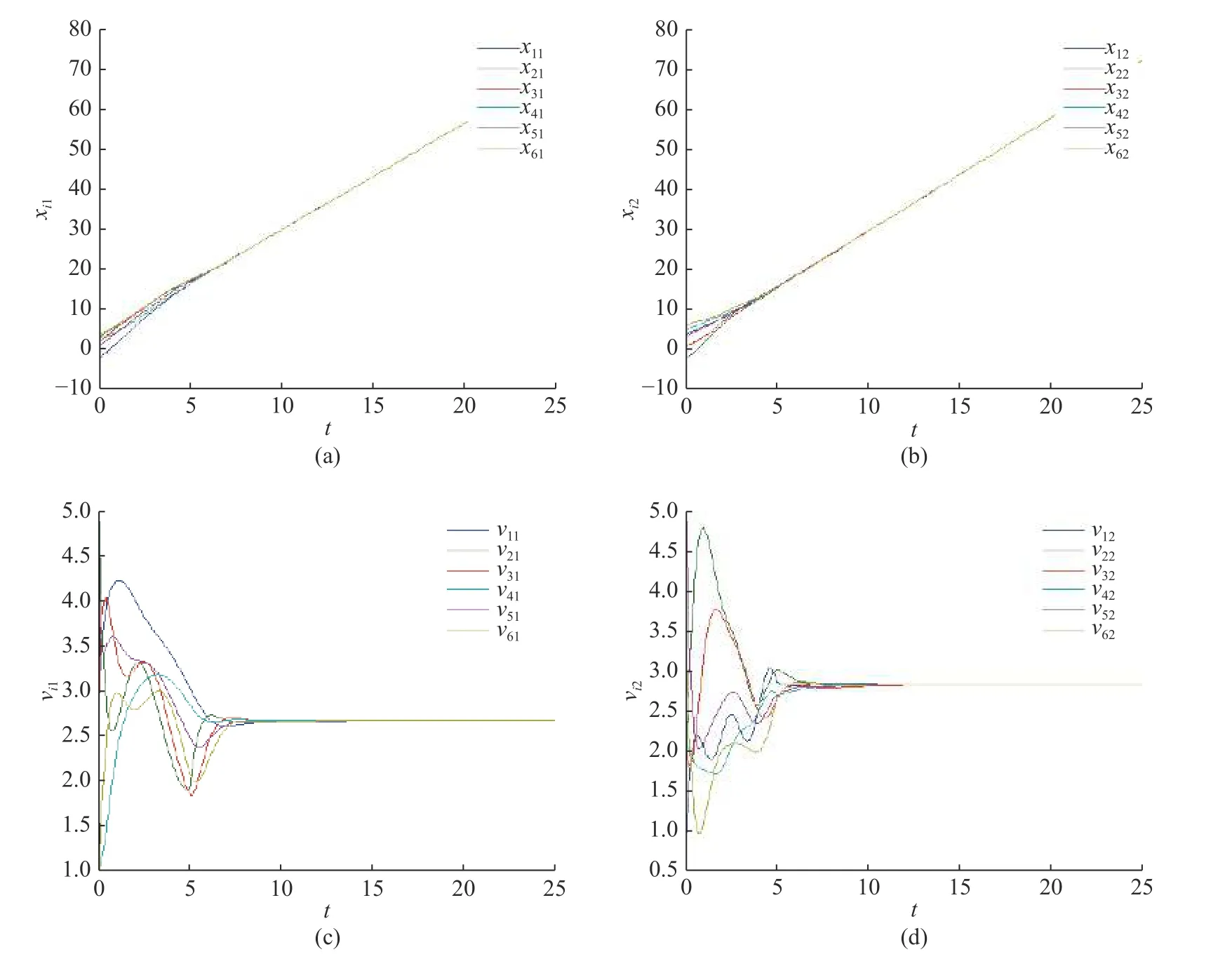
圖2 多智能體系統狀態曲線Fig.2 Curves of state of the multi-agent systems
從圖2 可以看出,隨著時間的推移,在存在有界外部擾動和時變通信時延的情況下,該多智能體系統的位置狀態和速度狀態曲線在大約12 s 左右時逐漸達到一個相同的值,從而驗證了提出的分布式PI 控制協議可以實現2 階多智能體系統(2)的一致性,驗證了定理2 的正確性和有效性。
4 結束語
針對2 階時延多智能體系統的一致性問題,同時考慮了外部擾動的影響,采用了分布式PI 控制策略,對該2 階多智能體系統進行狀態轉化,從而將原系統的一致性問題轉換為新系統的穩定性問題。運用李雅普諾夫穩定性理論對新系統的穩定問題進行分析,構造新型的Lyapunov-Krasovskii候選泛函,給出了新的系統實現穩定性的充分條件,也就是原多智能體系統實現一致性的充分條件。同時,在構造的Lyapunov-Krasovskii 泛函中加入三重積分項,從而減少所得充分條件的保守性。文中結論表明,系統的一致性和控制協議的參數、系統的通信拓撲結構以及時延的上界有關。最后,通過數值仿真對得到的定理和推論進行驗證。后續可將文中結果拓展到線性[25]和異構[26]多智能體系統中。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
