基于時頻分析和遷移學習的艦船尾流檢測方法
2022-09-07 04:05:30李永勝劉禮文王晨宇
水下無人系統學報 2022年4期
劉 罡,李永勝,劉禮文,王晨宇
(中國船舶集團有限公司 第705 研究所,陜西 西安,710077)
0 引言
尾流是艦船航行時由螺旋槳空化、艦船殼體與水的摩擦、卷入水中的空氣攪拌破碎等因素共同作用下,在船體后方區域內形成的一條含有氣泡的湍流[1]。尾流自導技術是指水下航行器利用尾流區域內發生了較明顯變化的水聲、溫度、電磁與光學等物理場性質進行制導,以實現檢測和跟蹤目標的目的。相比于其他目標特性,尾流場的物理尺寸大、持續時間長、不易復制或消除,且與艦船航行軌跡高度重合,尤其針對聲尾流自導技術的理論研究和工程實踐應用最廣泛,使聲尾流自導方式具備了高命中率等優勢,例如美國MK45-F和俄羅斯56 型魚雷使用的頂視尾流聲自導以及側視尾流聲自導[2]。然而,現有尾流檢測方法都是通過檢測尾流區域內氣泡對聲脈沖多次反射產生的回波脈沖展寬特性實現的,主要基于人工提取的時域特征,過分依賴經驗,人為主觀因素影響過大,環境適應性較差,不符合未來設備智能化發展的趨勢,而深度學習方法則可以解決這一問題。
深度學習[3-4]通過模擬生物大腦神經網絡,具備數據驅動、自主學習、提取目標特征的特點,避免了人工特征的缺陷。近年來,利用深度學習理論進行水下目標檢測與識別方面的研究不斷深入。王強等[5]結合深度置信網絡(deep brief net,DBN)和有限長單位沖激響應 (finite impulse response,FIR)濾波器證明了深度學習模型在水下目標特征提取方面的可行性。宋達[6]采用時頻分析圖像和深度學習模型實現了對水下蛙人目標的正確識別。呂海濤等[7]利用卷積神經網絡(convolutional neural network,CNN)對艦船輻射噪聲進行分類,分類結果優于傳統識別方案。
但是,在水下目標識別領域中,尤其是針對艦船檢測和識別問題,無法獲取深度學習所需要的海量訓練數據,導致深度學習模型訓練效果不佳。作為深度學習的一個分支,遷移學習可以將神經網絡從源領域學習到的知識遷移至目標領域,有效解決訓練樣本不足的問題,在降低人力、物力消耗的同時保證了較好的訓練效果。近年來遷移學習技術[8-9]在水下目標檢測和識別領域發展迅速。朱兆彤等[10]利用預訓練好的AlexNet 模型實現了對仿真聲吶圖像的精確識別。鄧晉等[11]則利用遷移VGG 模型和梅爾頻譜圖完成了對艦船噪聲信號的有效分類。付同強等[12]通過結合遷移學習和優化二維變分模態分解方法,完成了對ShipsEar數據集中5 類水中目標的分類測試,表現出良好的特征提取能力和噪聲抑制能力。將遷移學習策略應用于水下目標檢測、識別領域的模型中,可以在樣本數量不足的情況下迅速使深度學習模型獲得目標領域的檢測和識別能力。然而,目前在水下方面應用研究較多的遷移模型主要是卷積神經網絡,對聲尾流回波信號并不適用。因此,如何在尾流信號上遷移預訓練的CNN 模型仍需要進行深入研究。
基于以上研究進展及問題,文中提出了一種基于時頻分析和遷移學習的艦船尾流檢測方法。該方法通過對艦船尾流回波進行短時傅里葉變換,得到尾流時頻圖作為遷移模型訓練樣本,進而完成對CNN 模型的遷移;通過對比遷移學習和傳統檢測算法之間、不同遷移學習策略之間以及4 種遷移模型之間的識別性能和時間成本差異,驗證了所提方法的有效性。
1 艦船尾流特性
1.1 尾流回波聲學模型

尾流回波信號是一種由尾流內部氣泡對聲脈沖散射結果相互疊加產生的混響,因此,可將尾流回波類比于海水混響處理。根據聲波在氣泡層中散射的能量學理論可知,自導系統接收到的尾流回波聲壓可表示為[13]式中:p0為距離發射基陣1 m 處的聲壓;r為氣泡散射點和接收基陣之間的距離;β為衰減系數;mkc為尾流散射系數;H為艦船尾流厚度;c為水中聲速;τ為發射聲脈沖寬度;b(θ,φ)和b′(θ,φ)分別為發射和接收基陣按照壓力的指向性系數。
由式(1)可知,艦船尾流的聲學特性主要由尾流散射系數mkc決定
式中:R為氣泡半徑;n(R)為氣泡分布函數;fr為氣泡諧振頻率;f0為發射聲脈沖頻率;δ為氣泡諧振的阻尼系數,δ ≈KR=2πf0R/c。
因為尾流回波信號是由尾流區內部的大量氣泡散射產生的,所以mkc取決于氣泡群的聲學特性,如大小、數量和諧振頻率等。
艦船尾流與正常海水的聲學特性區別主要由氣泡的半徑和密度體現,即
式中,u(R)為單位體積內半徑相等的氣泡體積之和。
氣泡諧振頻率計算過程則可以簡化為

又知r=ct/2,則尾流回波信號的聲壓公式為
若從0 時刻開始發射探測信號,水下航行器航行深度為HT,則航行器接收到尾流信號的開始時間為

則由式(5)和(6)可知,航行器接收到的艦船尾流回波為

其中

1.2 時頻特性
通過對上述艦船尾流回波聲學模型進行仿真,進而完成尾流信號的時頻域特性分析。
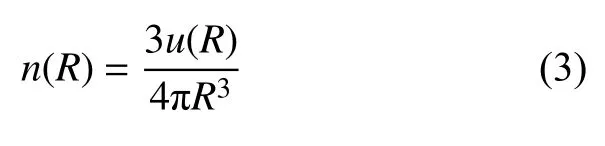
如圖1 所示,假設艦船航速為10 kn,尾流年齡約3 min,尾流層厚度H為6 m,寬度W為36 m,內部氣泡半徑范圍為8 ~200 μm,水中聲速1 530 m/s,衰減系數為0.1 dB/m,水面風速為3 m/s。假定航行器在艦船尾流正下方,航行深度為10 m,以等時間間隔垂直向上發射固定頻率的單頻信號。
圖1 尾流探測示意圖Fig.1 Diagram of wake detection
若聲線按照直線傳播,根據上述條件得到的尾流仿真數據與實測數據的對比結果如圖2 所示。根據圖中結果可以看出,雖然由于實際水文與尾流厚度等條件變化導致仿真數據與實測數據在尾流持續時間、噪聲強度等方面具備一定的差異性,但是二者的慢變包絡比較相似,在體積混響之后都緊跟著尾流反射信號,具備很明顯的時域展寬現象。
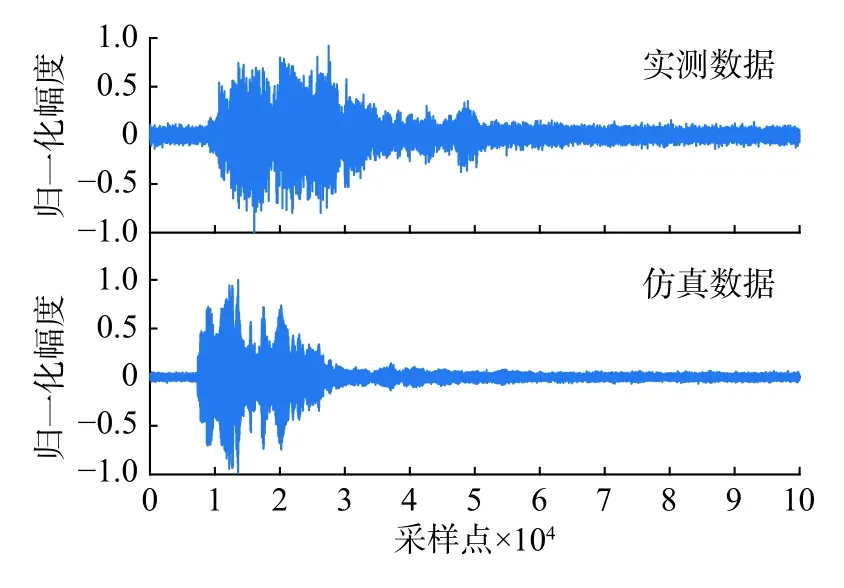
圖2 實測與仿真數據對比Fig.2 Comparison between measured data and simulation data
水下航行器工作在尾流區及非尾流區的回波信號仿真結果如圖3 所示。從仿真結果可知,當水下航行器工作在非尾流區域內時,回波信號中僅包含了海水體積混響和海面混響;當水下航行器工作在艦船尾流區域時,探測脈沖較難透過尾流層,因此回波信號主要由體積混響和尾流的反射信號組成。從圖3 中可以看出,尾流回波在時域上具有明顯的展寬,與非尾流信號有著明顯的差異。然而在實際應用中,尾流回波的時域特征易受到環境的影響,適應性不足。
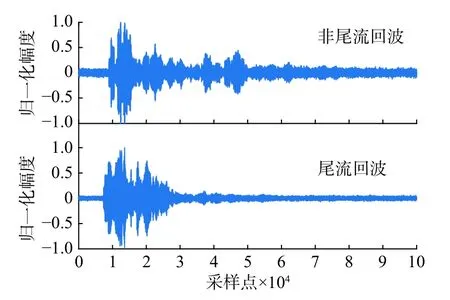
圖3 尾流回波與非尾流回波對比Fig.3 Comparison between wake echo and non-wake echo
尾流信號的時間展寬是無法確定的,且容易受到強混響的干擾。因此,可以利用短時傅里葉變換(short-time Fourier transform,STFT)對尾流信號進行時頻分析,觀察尾流回波在時頻域分布特性,獲取更加穩定的特征,結果如圖4 和圖5 所示。
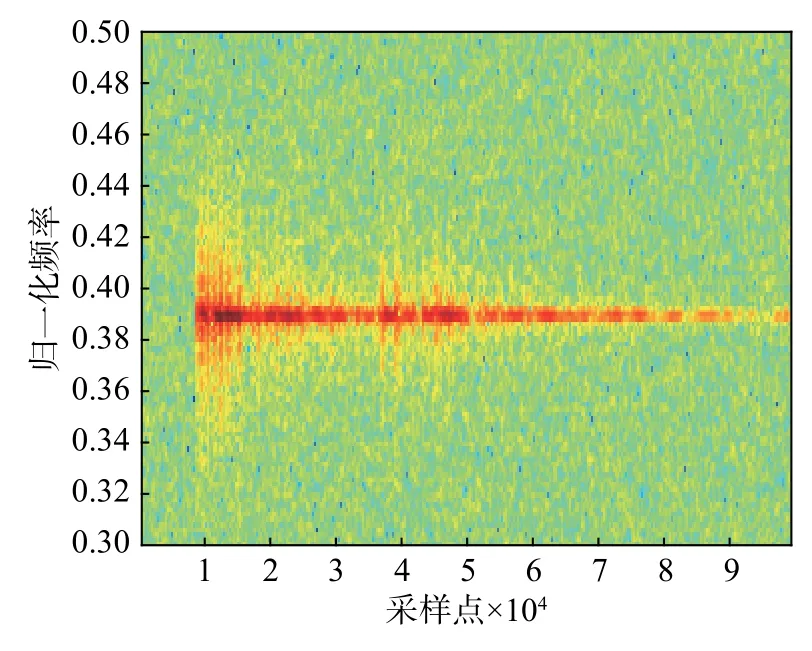
圖4 無尾流回波時頻圖Fig.4 Time-frequency map of non-wake echo
與圖4 結果相比,圖5 的信號在近距離上存在著較強的尾流反射信號,不但具備明顯的時域展寬效應,而且也表現出很強的頻率擴展,遠大于無尾流區。因此,與混響相比,艦船尾流信號在回波強度、時域及頻域展寬方面都有著明顯的差異。
艦船尾流檢測可以看作一種特殊的二分類問題。由于回波信號的時頻域結果可以作為圖像處理的輸入,所以能夠利用圖像識別的方法進行艦船尾流檢測。
2 模型與遷移策略設計
2.1 卷積神經網絡
CNN 指在網絡的結構中至少使用一層卷積代替一般矩陣運算的神經網絡,專門用于處理類似網格結構的數據,在網絡輸入為圖像格式時具備顯著的效果,是目前在圖像識別領域應用最成功的深度學習模型。
經典的CNN 結構基本由卷積層、池化層和全連接層組成,如圖6 所示。CNN 通過卷積層實現特征學習,池化層對卷積層的學習結果進行抽象和降維,降低運算壓力。通常利用卷積層和池化層的交替疊加提升模型的學習能力,提取輸入圖像的層次化特征,疊加層數越多,模型的特征學習能力越強。最終由若干個全連接層對輸入特征進行加權組合,映射至各類別空間完成目標識別。
在訓練樣本、超參數等條件一致的情況下,不同的CNN 模型對同一問題的識別效果是不同的,因此選擇模型時需要全面考慮識別精度和訓練效率的問題。文中共選擇了4 個經典的CNN 模型進行對比,分別是AlexNet、Inception-v3、ResNet-50以 及ShuffleNet。對比試驗結果可知,AlexNet 模型效果最佳。
AlexNet 是一種典型的CNN 模型,曾經在ImageNet 數據集上共1 000 個類別的圖像識別問題中取得了優異的成績[14]。標準的AlexNet 共有8 層網絡結構,前5 層為卷積 層(Layer1~ Layer5),后3 層為全連接層(Layer6~Layer8),最后一個全連接層輸出連接到softmax 分類器,最終得到輸入樣本分布在1 000 個類別的概率。
2.2 遷移學習
一個標準的CNN 模型經常具有復雜的結構和龐大的參數量,訓練一個包含如此多參數的模型需要海量的樣本數據作為支撐,耗時耗力。然而,水下目標識別數據集樣本較少,無法支持CNN模型有效訓練,容易發生過擬合問題,導致網絡性能下降,因此引入遷移學習模型來解決數據不足問題。
遷移學習的本質是知識的遷移再利用,其定義如下:給定源域Ds和目標域Dt,其中,D={X,P(X)},并且給定源任務T s以及目標任務Tt,其中,T={Y,P(Y|X)}。在Ds≠Dt并且T s≠Tt的情況下,利用來源于Ds和Ts的信息學習得到目標域Dt中的條件概率密度分布P(Yt|Xt)。遷移學習是深度學習理論在缺少大量標注數據的任務中規模化應用所必需的。
根據文獻[15]結論,CNN 模型的淺層結構在不同任務中的特征學習過程具備較高相似性,即具備可移植性,深層結構才體現出不同任務的差異性。因此,可以將在其余任務中完成預訓練的CNN 模型作為特征提取器,遷移至目標數據集,結合其淺層結構搭建合適的網絡模型。
2.3 基于遷移學習的尾流檢測方法
基于遷移學習的艦船尾流檢測方法主要分為2 個部分:艦船尾流檢測框架和基于CNN 模型的遷移學習策略。尾流檢測的設計流程如圖7 所示,首先采集尾流試驗數據作為初始樣本;然后對初始樣本數據進行離散時間傅里葉變換(discrete-time Fourier transform,DTFT),得到時頻圖作為待檢測樣本集;其次,遷移AlexNet 等預訓練CNN 模型,在時頻圖上進行二次訓練;最終得到尾流檢測結果,完成試驗性能對比分析。
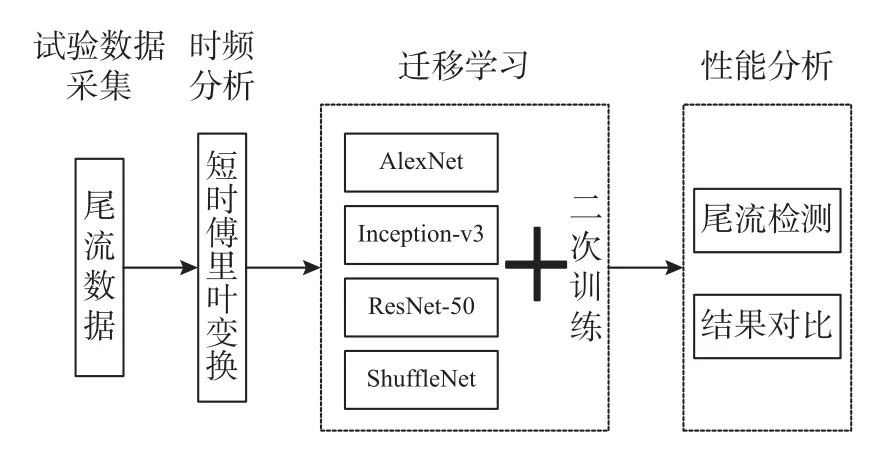
圖7 艦船尾流檢測框架Fig.7 Ship wake detection framework
基于CNN 模型的遷移學習主要基于參數凍結和模型微調方法實現。如圖8 所示,遷移CNN模型的特征提取層,重新構建全連接層與softmax層形成新的模型對艦船尾流進行檢測,具體步驟包括:1) 選定已完成預訓練的CNN 模型;2) 遷移模型的底層結構及相關參數至目標模型中;3) 調整模型的高層結構,移除最后一個全連接層,在目標模型中替換成節點數為2 的全連接層,構成新的模型;4) 在目標數據集中重新訓練模型,完成整個CNN 模型的遷移學習過程。
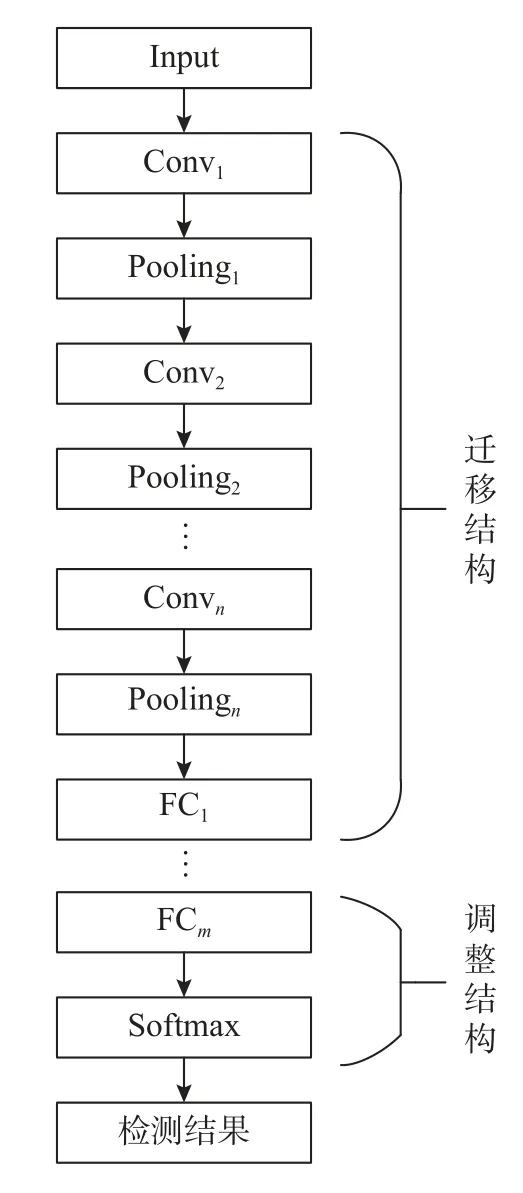
圖8 基于CNN 模型的遷移學習策略Fig.8 Transfer learning strategy based on CNN model
3 性能分析
3.1 數據準備和訓練環境
為驗證該方法的有效性,采用某海域下實航數據對遷移學習結果進行驗證,試驗條件如下:試驗船只航行速度為15 kn,吃水深度6 m,航行器航行深度10~15 m,航速50 kn,1 級海況。樣本數據共2 500 組,其中620 組為尾流數據,其余為非尾流數據,按照8∶2 的比例劃分訓練集和驗證集。由于遷移CNN 模型輸入尺寸與時頻圖原始結果具有差異,在輸入時需對目標時頻圖進行縮放。
訓練環境:Inter(R) Core(TM) i9-9900K CPU@3.60 GHz 3.60 GHz,內存32 G,程序在windows10系統下Matlab2019 軟件下運行。模型學習率參數為1×10?4,為加快訓練速度,將新添加層的權重學習率因子設置為10。
3.2 不同樣本量下遷移學習性能
為了測試遷移學習對于訓練樣本量的需求,文中設計了對比試驗,在遷移模型參數及訓練超參數不變的情況下,觀察訓練樣本占總樣本量30%~80%下的模型泛化能力,試驗結果如圖9 所示。
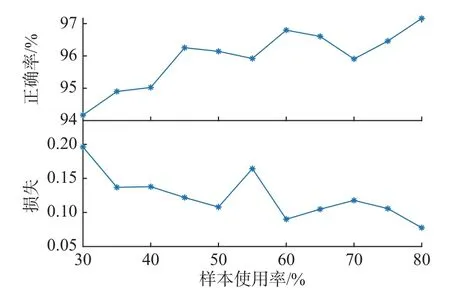
圖9 不同訓練樣本條件下遷移學習性能對比Fig.9 Performance comparison of transfer learning methods based on different training samples
根據圖中結果可知,隨著訓練樣本的增加,遷移學習檢測性能緩慢提升。當僅使用30%訓練樣本時,驗證集的檢測正確率在94.17%,損失為0.196 1;當訓練樣本達到80%時,驗證集檢測正確率提升至97.16%,增加了約3%,損失為0.105 7。從試驗結果上講,增加訓練樣本可以提升尾流檢測的效果,但是,遷移學習方法即使僅使用少量的訓練樣本同樣能夠達到較好的檢測性能。
3.3 遷移學習與非遷移學習性能對比
如上所述,傳統的艦船尾流檢測方法主要依賴于尾流時域回波的展寬效應。為了對比傳統算法與遷移學習方法之間的性能差異,文中設計了時域檢測、時頻圖+深度學習與時頻圖+遷移學習3 類方法的對比仿真試驗。其中人工方法無訓練過程;深度學習方法使用與AlexNet 模型相同的結構,隨機初始化模型內部參數值后進行訓練;遷移學習方法則使用已完成預訓練的AlexNet 模型,采用上節中描述的遷移策略重新訓練模型,3 種尾流檢測方法的結果如表1 所示。
根據表1 中算法性能的對比結果可知,文中所用的時頻圖+遷移學習的尾流檢測方法正確率在96.37%左右,比傳統時域檢測的方法正確率提升了10%左右,高于單獨深度學習模型88.45%的正確檢測率。時頻圖+遷移學習方法的虛警率與漏警率均在4%以下,遠低于傳統時域檢測方法和深度學習方法。此外,深度學習方法和傳統時域檢測方法的虛警率、漏警率和正確率比較接近,即2 種方法之間不存在明顯的性能差異。
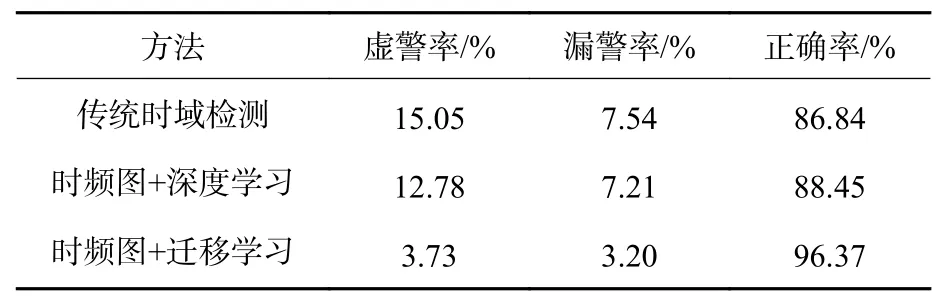
表1 3 種算法性能對比Table 1 Performance comparison among three methods
遷移學習與深度學習的訓練過程對比如圖10所示。由圖中的結果可知,遷移學習方法在經過20 多次迭代訓練后驗證集檢測正確率迅速達到95%左右,損失降低至0.3 附近,之后擬合程度緩步提升;而深度學習模型的擬合速度則遠低于遷移學習模型,經過100 多次的迭代訓練后,其擬合程度與遷移學習的差距才慢慢縮小,但擬合程度一直低于遷移模型。此外,結合表1 中結果,深度學習模型的泛化能力同樣不足。因此,針對文中問題,相比于常規深度學習模型,遷移學習的泛化能力和訓練效率均占優勢。
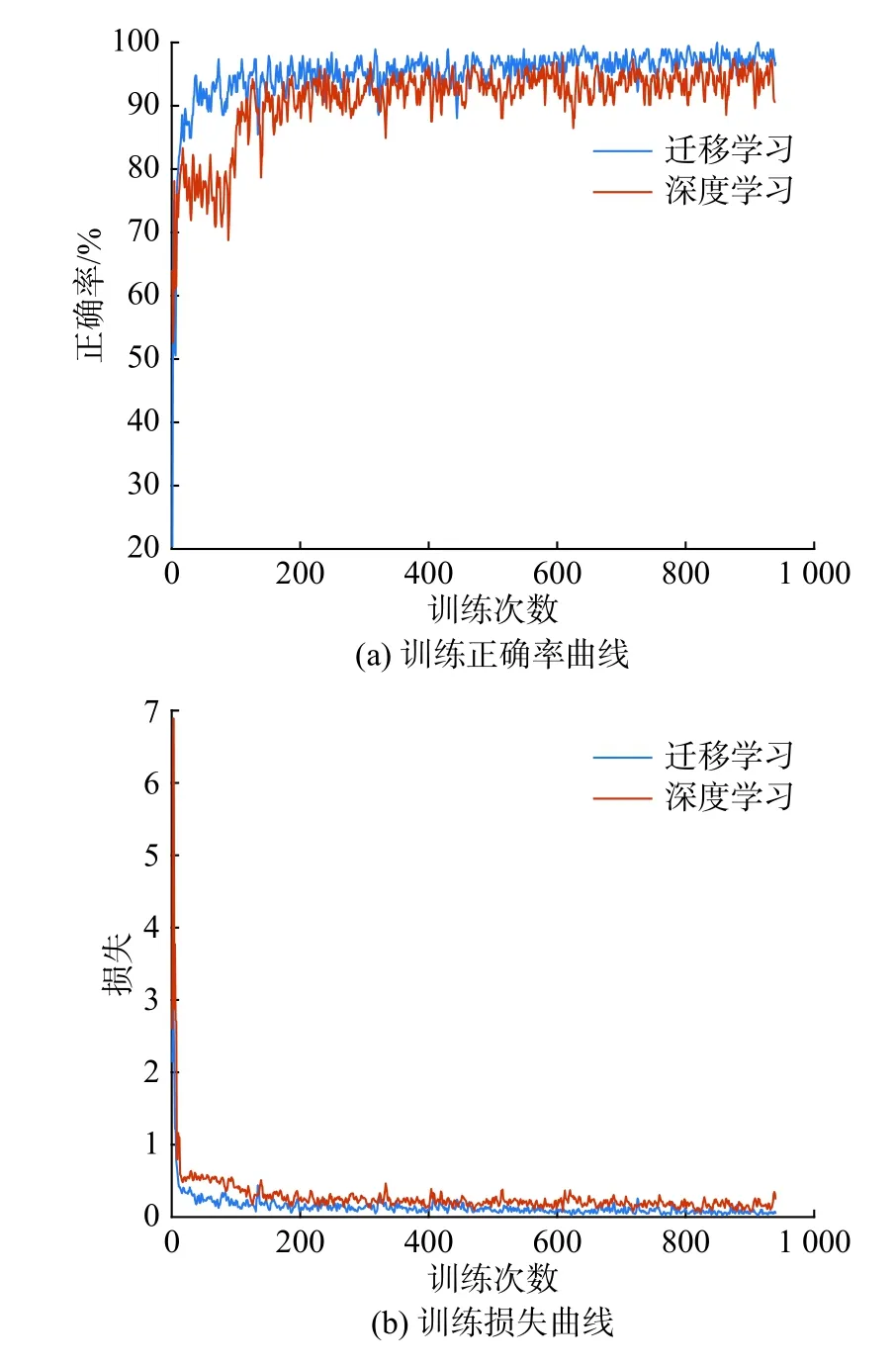
圖10 遷移學習與深度學習訓練過程對比Fig.10 The training process comparison between transfer learning and deep learning
3.4 不同遷移策略性能對比
在遷移模型訓練的過程中,需要對網絡內部參數進行訓練,通常可以采用凍結參數和微調的方法對網絡參數進行調整。一般情況下,可以凍結所有的遷移結構參數,僅對新添加的層進行訓練,也可以對整個模型的參數進行重新訓練。
為比較不同遷移策略下檢測性能,文中基于AlexNet 模型設計了以下3 種對比試驗:1) 凍結所有遷移層(Layer1~Layer7)參數,只對全連接層Layer8 進行訓練;2) 凍結所有卷積層(Layer1~Layer5)參數,訓練全連接層Layer8,同時對前兩層全連接層參數進行微調;3) 不凍結參數,訓練全連接層Layer8 的同時對模型的其余參數進行微調。3 種對比試驗的訓練過程和最終性能分別如圖11和表2 所示。
由圖11 中3 類方法下遷移學習的重新訓練過程可知,模型的凍結參數量越少,擬合結果越好。在預訓練模型的參數基礎上,只需要經過數10 次的迭代訓練,遷移模型就可以快速收斂,其損失函數和擬合狀況都能達到一個較好的狀態。

圖11 不同凍結參數方法訓練過程對比Fig.11 The training process comparison between different freezing parameter methods
根據表2 中性能對比結果可知:凍結所有遷移層需要重新訓練的參數最少,其運算時間最少,為204 s。與其時間成本相對的是,由于可調參數數量下降,其測試正確率也是最低的。隨著參數凍結數量的減少,3 類方式的正確率和運算時間也逐步提升,最終可達96.37%和266 s。對比方式1、2 與方式2、3 之間的性能差異可知,雖然方式2、3 之間解凍的參數數量更多,但是性能提升幅度卻小于方式1、2 之間的差異。此現象說明Layer1~Layer5 之間的卷積層在源數據域上已經得到了充分的訓練,可以較好地學習圖像的通用特征,微調卷積層參數對文中問題的性能提升不明顯,與Yosinski[15]提出的CNN 淺層結構在不同數據集上具備高度相似性的論點相符。
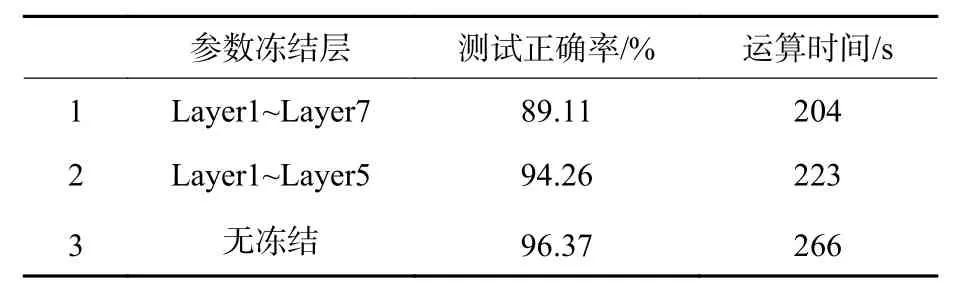
表2 不同凍結參數方式性能對比Table 2 Performance comparison of different freezing parameter methods
3.5 不同遷移模型性能對比
為了對比不同模型的尾流檢測性能,選取AlexNet、ShuffleNet、ResNet-50 以 及 Inception-V3 等4 種預訓練模型進行對比試驗,試驗結果如圖12 所示。
根據圖12 結果可知,各種遷移網絡模型均能夠在較低的迭代次數后對訓練樣本達到較高的擬合程度。相比其他3 類模型,由于AlexNet 模型的深度較淺且結構相對簡單,所以擬合度在4 類模型中最低。
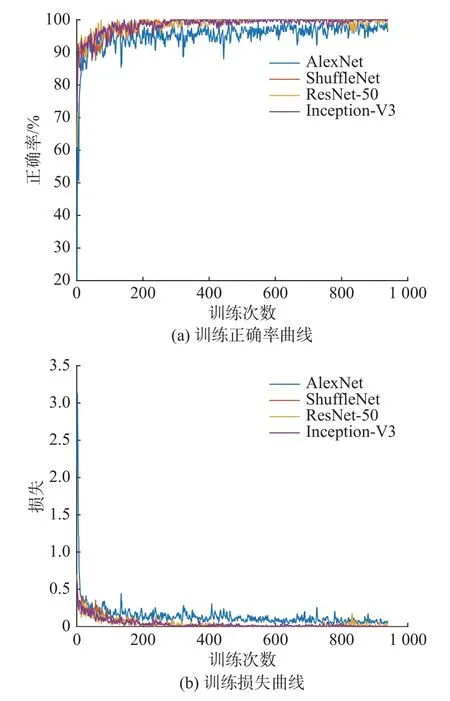
圖12 不同遷移學習模型訓練過程對比Fig.12 The training process comparison between different transfer learning models
由表3 結果可知,所有參與對比試驗的CNN模型測試正確率都達到了95%以上,優于傳統尾流檢測方法。其中,采用Inception-V3 模型的遷移學習性能最高,正確率達到了97.49%,但耗費時間較多,運算時間為6 749 s;AlexNet 模型的重新訓練所需的時間最短,運算時間為266 s,正確率為96.37%。總體而言,遷移AlexNet 模型是最優的選擇。
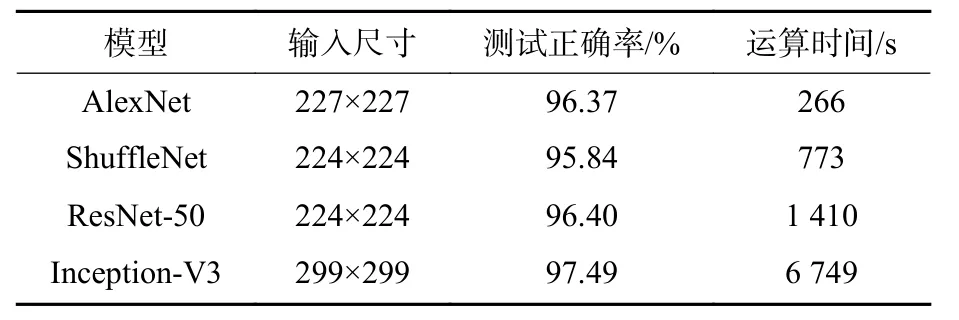
表3 不同遷移學習模型泛化能力對比Table 3 Generalization ability comparison between different transfer learning models
4 結束語
通過STFT 獲取尾流信號時頻圖構建目標數據集,提出了一種基于時頻分析和遷移學習的艦船尾流檢測新方法,并利用實航數據驗證了所提方法的有效性。試驗結果表明,文中方法可以實現對尾流信號時頻特征的有效提取,結合遷移學習策略能夠在小樣本條件下達到較高的識別正確率,性能超過傳統識別方法10%以上;通過對比試驗比較不同訓練策略和遷移模型的時間成本和正確率差異,結果表明,綜合時間成本和識別性能,AlexNet 模型為最佳選擇,采用第3 種訓練方式遷移AlexNet 模型可以達到最優的識別性能,正確率為96.37%,但運算時間有少量增加。綜上所述,基于時頻分析和遷移學習的方法可以有效地實現艦船尾流檢測,兼顧了時間成本低、樣本需求量低和識別性能高等優點,相比傳統尾流檢測算法具有明顯優勢。通過實航數據測試,驗證了深度學習模型以及遷移學習策略在聲尾流檢測中的可行性,在水下目標回波檢測和識別任務中具有廣闊的應用前景。未來工作中將對此方法進行改進,嘗試對更加復雜的水下目標進行檢測和識別。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
