基于寬波段光源拼接鏡新型共相檢測技術研究
2022-09-07 06:54:44楊阿坤鄒吉平
中國光學 2022年4期
關鍵詞:檢測
李 斌,楊阿坤,鄒吉平
(華東交通大學 智能機電裝備創新研究院, 江西 南昌330013)
1 引 言
增大望遠鏡直徑是獲得更高分辨率的最有效途徑,但是由于科學技術、制造成本、運輸風險等因素,目前單塊光學主鏡的最大直徑約為8.4 m。為了獲取更大口徑的望遠鏡,就需要采用其他方法,拼接鏡技術應運而生。但為了保證拼接鏡面的成像質量和望遠鏡的高分辨率,必須通過定量測量平移誤差(piston)確定性調整拼接子鏡。大口徑望遠鏡拼接技術現已成為發達國家的重點研究課題,而實現拼接鏡共相誤差的高效率和高精度檢測對于提高拼接鏡的成像質量,促進拼接技術的發展具有重要的現實意義[1-7]。目前,檢測拼接鏡平移誤差有很多種方法,如 PD法[8]、曲率傳感器法[9-10]、夏克-哈特曼寬窄帶法[11-14]、金字塔波前探測器法[15]、色散條紋傳感器法[16]、色散瑞利干涉法[17]、雙波長共相檢測[18-20]、基于深度學習[21-22]等方法。但這些方法并不足夠完善:如 PD 法耗時長,不適用于子鏡過多的拼接鏡檢測;曲率傳感器的檢測量程小(為 ±λ)亦不適用于子鏡過多的拼接鏡檢測;色散條紋干涉法存在相機靶面大和能量利用低的缺點,四棱錐波前探測器法的錐頂角加工難度大,存在 2π模糊效應;雙波長共相檢測法存在能量利用率低、檢測系統復雜的缺點;深度學習耗時長、魯棒性差等。目前,應用最為廣泛的共相檢測技術為寬窄帶夏克-哈特曼法。寬帶夏克-哈特曼方法雖然有較大的檢測量程,但在大量程檢測時,所利用光能帶寬很窄(10 nm 帶寬),造成目標流量過低而使檢測時間過長;且寬帶夏克-哈特曼法檢測精度較低。窄帶夏克-哈特曼法檢測精度高,但檢測量程存在2π 模糊現象,檢測量程不能超過所檢測準單色光的半個波長,且所利用光能帶寬更窄(10 nm 帶寬以下),也存在目標流量過低而使檢測時間過長問題。并且,寬帶檢測方法需利用多幅不同平移誤差下相干衍射圖案(如 Keck 中寬波段光源檢測中模板圖案為 11 張)為模板,因而匹配時間長,且檢測精度相對較低(30 nm 級)。
基于此,本文提出一種新的拼接鏡共相檢測方法,即粗共相時,以 400~700 nm 帶寬白光為光源,基于兩半圓孔的非相干衍射圖案作為模板;精共相以白光為光源,以一幅相干衍射圖案(白光艾里斑)代替多幅不同平移誤差下的相干衍射圖案為模板的新型共相檢測方法。該方法目標流量大(300 nm 帶寬),檢測量程和時間均優于寬窄帶夏克-哈特曼法,檢測精度與寬窄帶夏克-哈特曼法相當(10 nm 級),且檢測系統可與寬窄帶夏克-哈特曼法檢測系統共用。
2 基本原理
在拼接鏡共相誤差檢測中,通過在拼接子鏡間放置圓孔掩膜,并基于圓孔的夫朗和費衍射原理,通過放置圓孔的夫朗和費衍射圖案隨平移變化來計算兩子鏡間的平移誤差。圓孔檢測原理如圖1 所示,以圓孔的圓心為坐標原點,圓孔所在平面作為X-Y平面,圓孔的法線方向為Z軸建立坐標系,圓孔半徑為r,平面Y=0 將圓孔均分為上下兩部分,X軸上半部分圓孔的平移誤差為 δ/2;X軸下半部分平移誤差為 -δ/2。由圖1可知:上下半圓孔的距離為 δ,則波前的光程差為 2δ。
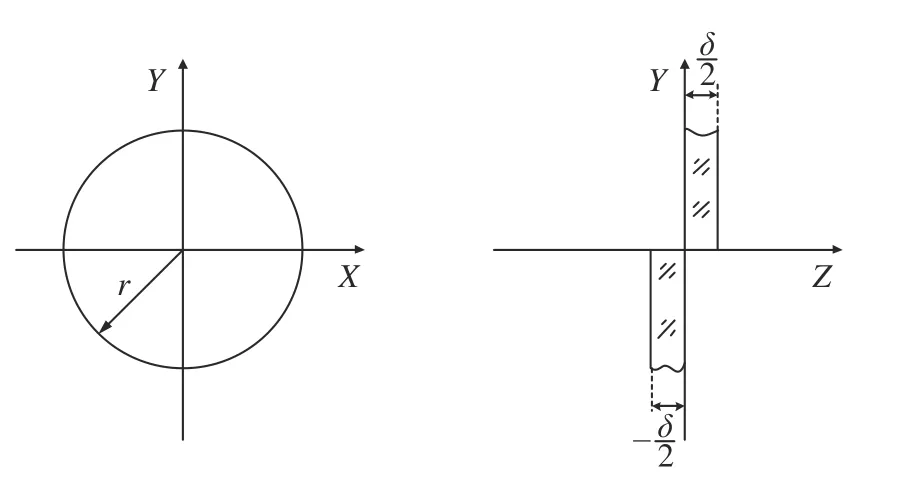
圖1 放置在子鏡間的圓孔示意圖Fig. 1 Schematic diagram of circular hole placed between sub-mirrors
假設光源為理想單色光,波長為 λ,則像平面的強度為[23-24]:

其中:k=2π/λ , ρ 為 孔平面極坐標,用 (ρ,θ)表示;w為像平面極坐標,用(w,ψ) 表示;(x,y)為孔平面坐標,( ξ,η) 為像平面坐標。孔徑平面的復振幅函數為f(ρ,kδ)。
當光源是中心波長為λ 、帶寬為 Δλ的光源時,則該光源的相干長度l=λ2/(2·Δλ),且不滿足λ2/Δλ ?1時 ,此時 Δk=的值不能忽略,即Δk對公式(1)中的三角函數值有很大影響。
現假設k服從高斯分布,則:

由以上分析可知:寬窄帶檢測法分別是從公式(1) 中的三角函數和公式(4) 中的系數α1,α2,α3中提取相位信息。
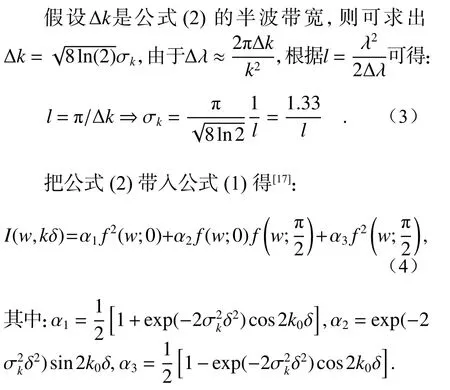
圖2(彩圖見期刊電子版)為在 400~700 nm波段,不同平移誤差下的兩半圓孔衍射圖案,此時該波段光源的相干長度值為l=0.552/(2×0.3)=0.504 μm。從圖中可知:當平移誤差在相干長度以內時,即在(-0.252 μm, 0.252 μm)以內時,衍射圖案呈現相干性;當平移誤差值在相干長度以外時,即平移>0.252 μm 或平移< -0.252 μm 時,衍射圖案呈現非相干性。
圖2 在400~700 nm 帶寬下,平移誤差從1 μm 到-1 μm 變化時的理論圓孔衍射圖Fig. 2 Theoretical circular diffraction patterns when piston error is varying from 1 μm to -1 μm at 400-700 nm bandwidth
圖3(彩圖見期刊電子版)為平移誤差在400~700 nm 波段相干長度內的衍射圖案,即平移誤差從250 nm 變化到-250 nm,21 張兩半圓孔衍射圖案。從圖中可以知:當平移誤差在( -l/2,l/2)以內時,衍射圖案呈現相干性,且相干圖案出現了重復,但白光理想艾里斑沒有出現重復。
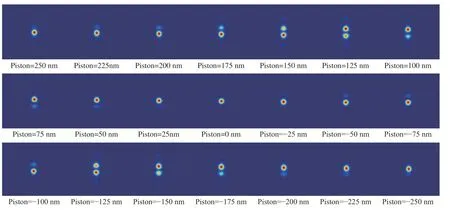
圖3 在400~700 nm 帶寬下,平移誤差從250 nm 到-250 nm 變化時的理論圓孔衍射圖Fig. 3 Theoretical circular diffraction patterns when piston error is varying from 250 nm to -250 nm at 400-700 nm bandwidth
3 仿真分析
3.1 圖像對比算法選取
通過理論仿真分析可知:在 400~700 nm 波段下,當拼接鏡平移誤差絕對值大于l/2時,衍射圖案呈現非相干性;當平移誤差絕對值小于l/2時,衍射圖案呈現相干性,雖然相干圖案會重復出現,但白光理想艾里斑圖案只出現了一次。因此,在平移誤差的絕對值大于l/2時,可利用圓孔衍射圖案非相干性來解算平移誤差,當其絕對值小于l/2時,利用相干圓孔圖案只出現一次白光理想艾里斑圓孔的性質來解算子鏡平移誤差。
由于灰度匹配算法具有較好的精度和魯棒性,且抗噪性能強,算法簡單。因此選用基于灰度匹配算法來計算實時圖與模板圖案的相干性,通過兩圖案的互相關系數值的大小判別兩圖案相似程度,其公式如下:
其中: Corr2為 互相關系數,N為圖案像素點總數,xi為 實時圖案在i點 灰度值,x為實時圖案灰度平均值,yi為模板圖案在i點的灰度值,y為模板圖案灰度平均值。
3.2 新型共相算法的仿真分析
由第二章分析可知:當平移誤差絕對值大于l/2時,衍射圖案呈現非相干性,當平移誤差絕對值小于l/2時,衍射圖案呈現相干性。在實際平移誤差檢測時,可利用該性質求解,即選用兩半圓孔的非相干衍射圖案為模板,利用基于灰度匹配算法計算拼接子鏡間兩半圓孔衍射圖案與模板圖案之間的互相關系值;而當兩子鏡間的平移誤差絕對值大于l/2時,衍射圖案與模板圖案的互相關系數值接近1,而當兩子鏡間的平移誤差絕對值小于l/2時,子鏡間的兩半圓孔衍射圖案呈現相干性,使得子鏡間的兩半圓孔衍射圖案與模板圖案的互相關系數值大幅下降。因此,可設定互相關系數的閾值,該閾值需小于平移誤差為l/2時的互相關系數。當計算所得互相關系數小于該閾值時,圓孔衍射圖案已經相干,即表明平移誤差在一個相干長度以內,而此時只存在唯一的白光理想艾里斑。因此,采用白光理想艾里斑作為模板,以白光相干長度為量程,將檢測精度設為步長,并利用互相關算法計算相鄰子鏡間圓孔衍射圖案與模板圖案之間的互相關系數。其中互相關系數對應的最大值平移誤差為拼接鏡平移誤差值。
以20 nm 為步長,兩圓孔平移誤差掃描區間為(-2 μm,2 μm),可得到互相關系數仿真曲線,如圖4(彩圖見期刊電子版)所示。其中平移誤差大于可見光相干長度時的模板圖案為非相干圓孔衍射圖案。從圖4(b)中可知:當平移誤差絕對值大于l/2時,互相關系數值都大于0.95,而當平移誤差絕對值小于l/2時,互相關系數值大幅下降,且所有的值都小于0. 95,因此設定閾值為0.9 來判定平移誤差的絕對值是否小于l/2。
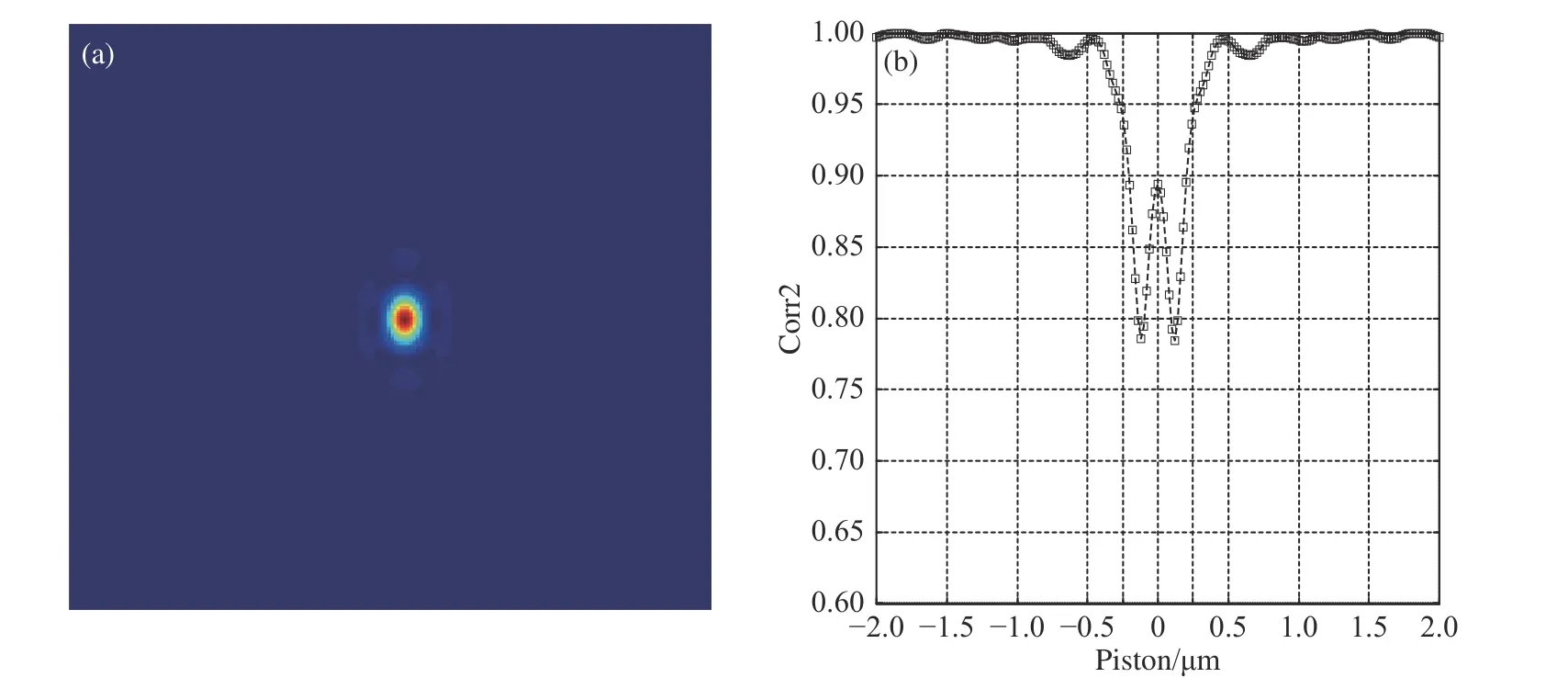
圖4 平移誤差大于可見光相干長度時的(a)模板圖案和(b)互相關系數Corr2 隨拼接鏡平移誤差變化關系圖Fig. 4 (a) Template pattern and (b) Corr2 as a function of piston errors when piston error is greater than visible coherence length
選用理想的圓孔艾里斑遠場圖案為模板圖案,以 5 nm 為步長,圓孔平移誤差掃描區間為(-250 nm,250 nm),可得到圖5(彩圖見期刊電子版)。從圖5 可知:在平移誤差的絕對值小于l/2,以及在平移誤差為零時,所對應的互相關系數最大,即在實際檢測中,以檢測精度為步長,以相干長度為量程,掃描一圈,找到互相關系數最大值點,從而求出平移誤差,檢測精度為 10 nm。

圖5 平移誤差在可見光相干長度以內時的(a)模板圖案和(b)互相關系數Corr2 隨拼接鏡平移誤差變化關系圖Fig. 5 (a) Template pattern and (b) Corr2 as a function of piston errors when piston error is within the coherence length of visible light
從圖4 和圖5 的仿真分析可知:該共相算法的檢測量程為無限大,理論檢測精度為10 nm 以上,檢測帶寬為 300 nm。在實際檢測平移誤差時,首先需解耦平移誤差與傾斜(tip/tilt)誤差并實時對傾斜誤差調節,而傾斜誤差的檢測方法與平移誤差解耦過程以及控制方法都在文獻[13-14]中有詳細介紹。采用該新型共相檢測方法檢測平移誤差時,選用400~700 nm 波段光作為光源,選用該波段下的非相干兩半圓孔衍射圖案為模板,設定0.9 為互相關系數的閾值,并以20 nm 為步長進行掃描,當互相關系數的值小于0.9 時,停止掃描。此時平移誤差在相干長度以內,切換掃描模式。以白光理想艾里斑為模板,將白光的相干長度作為量程,檢測精度作為步長進行掃描,即求得互相關系數最大值時對應的平移誤差。該對應平移誤差值,即為實際平移誤差。
4 誤差分析
由于圓孔掩模與兩拼接子鏡間無法達到中心絕對對準,實際拼接鏡工作時,就會產生一定的偏差;兩拼接子鏡需預留一定的間隙以防止因溫度變化而使拼接子鏡間相互擠壓;而且拼接鏡工作時探測光強會因相機產生的噪聲起伏變化,這些誤差都會對最終結果造成影響。因此,對拼接鏡進行共相檢測時還需要分析間隙誤差、偏心誤差和相機噪聲的影響。
4.1 間隙誤差對間隙精度影響分析
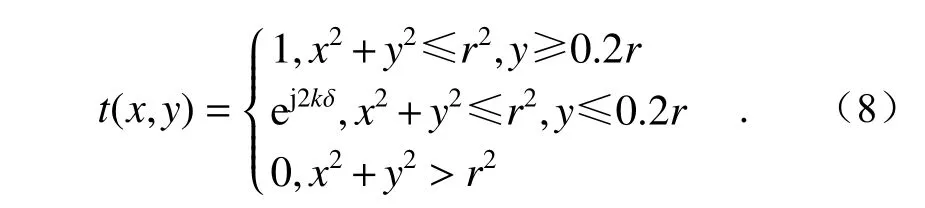
當在Y方向圓孔衍射存在0.2r的間隙誤差時,此時該圓孔的孔徑函數為:
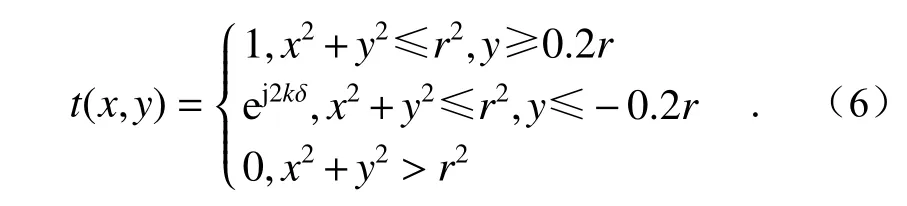
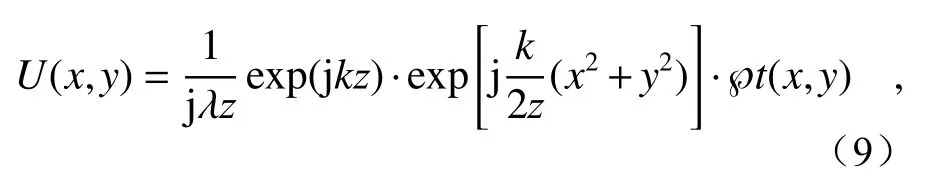
根據傅立葉光學理論,對間隙誤差下的孔徑函數進行傅立葉變換即可得到該處振幅函數,對振幅函數求平方可求得光強函數I(x,y):

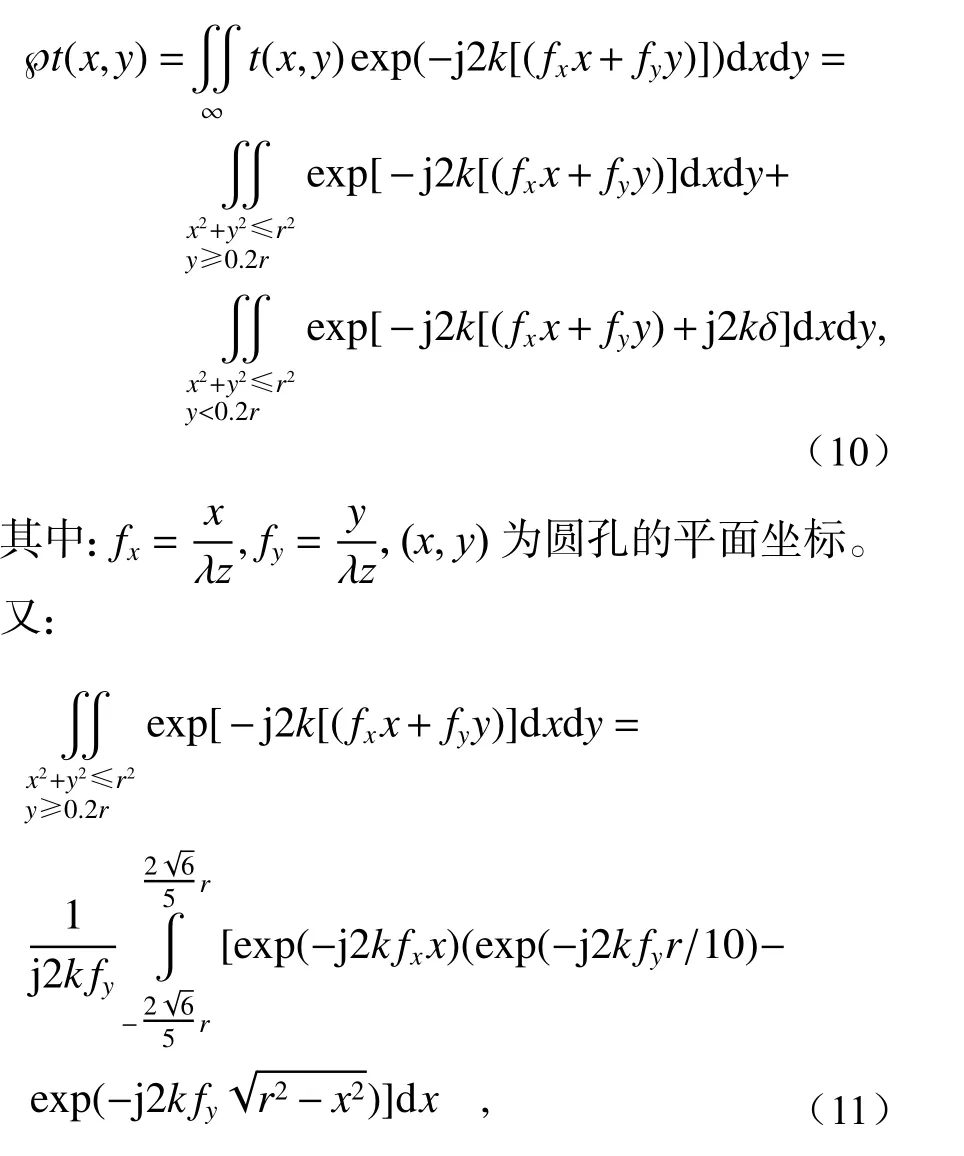
其中, ?的表示對函數t(x,y)進行傅立葉變換。
由以上兩式可依次求出在不同偏心距下的振幅,以及該偏心距下的光強。現定義:

其中,r為圓孔半徑,Δspace與r成正比例關系。
如圖6(彩圖見期刊電子版)所示,互相關系數Corr2 的值隨著R1值的變大而減小。從圖6(彩圖見期刊電子版)可知:當互相關系數Corr2=0.9,R1分別為0.2、0.3 時,對應的平移誤差分別為220 nm 和250 nm,均在相干長度±0.25 μm 內;而當R1=0.4,互相關系數Corr2=0.9 時,對應的平移誤差為400 nm,大于相干長度,此時不能用本文方法檢測。因此,使用本文方法檢測時,間隙誤差R1需小于0.3。
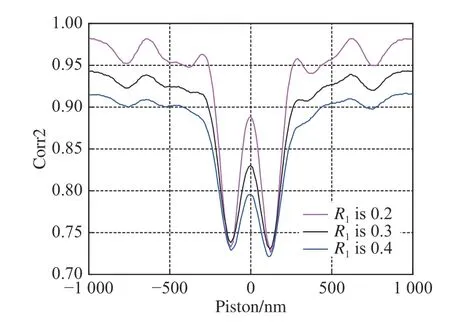
圖6 R1 分別為0.2、0.3、0.4 時,互相關系數Corr2 值與平移誤差關系圖Fig. 6 Corr2 as a function of piston errors when R1 is 0.2,0.3 and 0.4
4.2 圓孔偏心誤差對檢測精度的影響分析
當圓孔衍射在Y方向存在0.2r偏心誤差時,此時該圓孔的孔徑函數為:
則圓孔下的振幅函數U(x,y)為:
其中:
同理可得:
則當存在偏心誤差時,光強計算公式同式(7)。現定義:
其中, Δeccentric與r成正比例關系
如圖7(彩圖見期刊電子版)所示,隨著R2值的變大,互相關系數Corr2 最小值整體遞增。從圖7 可知:在互相關系數Corr2=0.9,R2分別為0.3、0.4 時,平移誤差都在相干長度±0.25 μm 內;而當R2=0.5 時,互相關系數Corr2 值均大于0.9,此時,無法獲得圓孔衍射的相干圖案,因此偏心誤差值R2需小于0.4。

圖7 R2 分別為0.3、0.4、0.5 時,互相關系數Corr2 值與平移誤差關系圖Fig. 7 Corr2 as a function of piston errors when R2 is 0.3,0.4 and 0.5
4.3 相機噪聲對檢測精度的影響分析
現定義SNR 為:

其中:Imax為 信號光強峰值,Iave為噪聲均值,δ為標準差。
如圖8(彩圖見期刊電子版)所示,隨著SNR的變差,互相關系數Corr2 整體遞減。從圖8 可知:在互相關系數Corr2=0.9,SNR 分別為90、60時,平移誤差分別為 210 nm 和 220 nm,都在相干長度±0.25 μm 內。而當R2=45 時,平移誤差為270 nm, 在相干長度±0.25 μm以外。因此噪聲誤差值 SNR 需大于60。
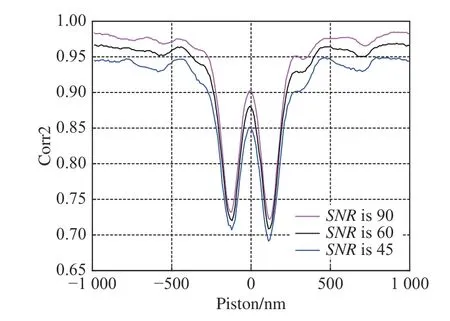
圖8 SNR 分別為45、60、90 時,互相關系數Corr2 值與平移誤差關系圖Fig. 8 Corr2 as a function of piston errors when SNR is 45, 60 and 90
4.4 同時存在多種誤差檢測精度的影響分析
在實際檢測平移誤差時,偏心誤差、間隙誤差和相機噪聲等誤差往往是同時存在的,因此,需分析存在多種誤差時對檢測精度的影響。如圖9 所示:在R2=0.3,SNR=90 時,互相關系數Corr2隨著R1的增大而減小。由圖9 可知:在R1=0.2,R2=0.3,SNR=90 時,互相關系數Corr2 為0.9 時,平移誤差為230 nm 和-220 nm,都在相干長度±0.25 μm 內。而當R1=0.3,R2=0.3,SNR=90 時,平移誤差為-290 nm 和300 nm, 在相干長度±0.25 μm以外。因此,R1≤0.2,R2≤0.3,SNR≥90。
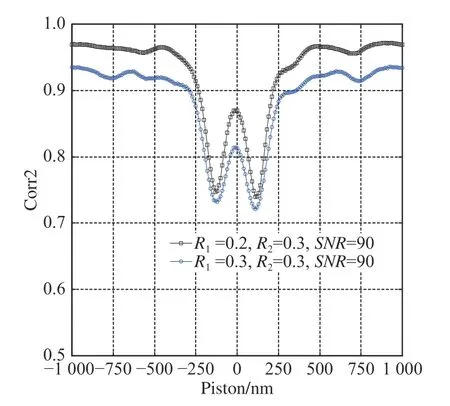
圖9 R1=0.2, R2=0.3, SNR=90 和 R1=0.3, R2=0.3, SNR=90 時,互相關系數Corr2 值與平移誤差關系圖Fig. 9 Corr2 as a function of piston errors when R1=0.2,R2=0.3, SNR=90 and R1=0.3, R2=0.3, SNR=90
5 結 論
本文針對所提的新型共相算法,理論分析了該新型共相檢測的方法的合理性。通過仿真驗證該新型共相算法性能,仿真中,實現了從微米級到10 nm 級誤差范圍內的平移誤差檢測,同時利用理論和仿真分析了該新型共相算法中間隙誤差、偏心誤差以及噪聲誤差對檢測精度和結果的影響,得到了該新型共相算法中的間隙誤差R1值小于0.2、偏心誤差R2值小于0.3 以及噪聲誤差SNR值大于90 時不會出現誤檢測。理論和仿真分析結果表明:該新型共相檢測方法適合于拼接鏡間共相的調節,且量程大、精度高、能量利用率高。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48