架空乘人裝置自轉抗繩輪的設計與應用
2022-09-11 01:27:22王球龍
設備管理與維修 2022年11期
王球龍
(湘煤立達礦山裝備股份有限公司,湖南株洲 412000)
0 引言
架空乘人裝置作為礦井輔助運輸系統的一種運輸裝置,因其具有運行安全可靠、運載效率高、操作簡單、低能環保等優點,現已廣泛應用于礦山生產中。由于礦山巷道的多樣性,架空乘人裝置在設計、安裝時需要考慮適應各種巷道的現場情況,例如絞車與架空乘人裝置同巷安裝、巷道寬度窄、巷道沿線有多點拐彎等,在這類巷道中安裝架空乘人裝置時,需要配備抗繩(收繩)裝置和拐彎裝置等。
1 自轉抗繩輪的技術研發背景
架空乘人裝置常使用的抱索器類型一般有固定抱索器、大坡度可摘掛抱索器(卡鉗式抱索器)、活動抱索器(瓦片式抱索器)等。
1.1 固定抱索器
固定抱索器配合普通的抗繩輪,通過抗繩輪收繩,能實現架空乘人裝置在窄巷道的安裝。運行缺點:運行中固定抱索器由牽引鋼絲繩帶動,以撞擊的方式通過抗繩輪,長時間運行,會對抱索器產生嚴重的損傷,造成抱索器松動,出現抱索器抱不緊的情況,容易發生乘人器打滑現象,存在安全隱患。
固定抱索器配合普通的托輪組,通過多組托輪組按照特定的方式安裝,能實現架空乘人裝置在多點拐彎巷道中的安裝。運行缺點:隨著長時間的運行,拐彎點的多組托輪組的托輪輪襯發生磨損,牽引鋼絲繩的運行軌跡發生變化,造成牽引鋼絲繩運行時容易發生掉繩現象,存在安全隱患。
1.2 大坡度可摘掛抱索器
大坡度可摘掛抱索器配合轉彎輪組、可旋吊椅,能實現架空乘人裝置在單向拐彎巷道中的安裝。運行缺點:①隨著長時間的運行,拐彎點轉彎輪組的輪襯發生磨損,牽引鋼絲繩的運行軌跡發生變化,造成牽引鋼絲繩在運行時容易發生掉繩現象,存在安全隱患;②只能適應多點單向拐彎的巷道,對于多點S 形拐彎巷道無法安裝。
活動抱索器配合單獨的軌道,能實現架空乘人裝置在多點S 形拐彎巷道中的安裝。運行缺點:①拐彎點只能是在水平位置拐彎;②抱索器靠運行慣性在軌道上滑行通過,無運行動力保障;③活動抱索器適應的最大巷道坡度不能超過18°。
2 自轉抗繩輪的設計原理
根據《煤礦安全規程》的要求,秉承高效、安全、結構簡單實用的設計原則,設計一種自轉抗繩輪,使架空乘人裝置能在窄巷道、多點拐彎巷道中安全可靠地安裝、使用(圖1)。
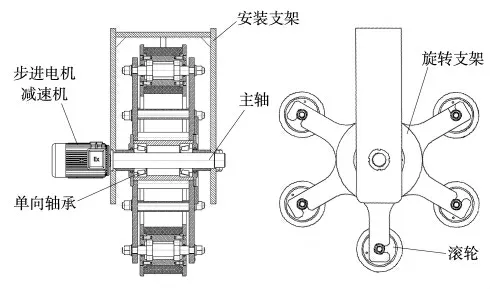
圖1 自轉抗繩輪結構組成
自轉抗繩輪主要由步進電機、減速機、主軸、單向軸承、安裝支架、旋轉支架、6 個均勻分布的滾輪組成。步進電機通過鍵連接與主軸連接帶動主軸,通過單向軸承帶動旋轉支架自轉,自轉的同時,滾輪與架空乘人裝置的牽引鋼絲繩之間通過滾動實現滾輪交替改變牽引鋼絲繩的運行軌跡,自轉抗繩輪通過安裝支架整體安裝在預埋橫梁上。
3 自轉抗繩輪在拐彎巷道中的應用
3.1 架空乘人裝置的安裝與運行軌跡
在S 形巷道中,架空乘人裝置由驅動裝置、從動裝置、牽引鋼絲繩及中間部分、內側抗繩輪、自轉抗繩輪、乘人器等部分組成(圖2)。乘人器在架空乘人裝置上按照設計負載要求,以一定的數量均勻分布在牽引鋼絲繩上,隨著牽引鋼絲繩一起運行。架空乘人裝置運行時,牽引鋼絲繩按圖2 箭頭所示方向運行,乘車人員通過乘人器,由牽引鋼絲繩帶動,從驅動裝置依次經過內側抗繩輪、自轉抗繩輪,達到從動裝置,將乘車人員從S 形巷道的高水平點送到低水平點,實現礦山巷道內的運人目的。
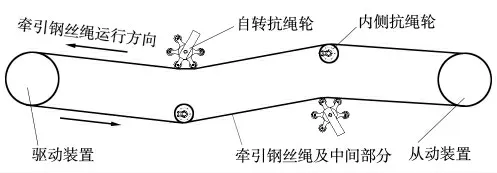
圖2 架空乘人裝置安裝示意
3.2 自轉抗繩輪運行原理
乘人器經過自轉抗繩輪時的運行過程如圖3~圖6 所示。
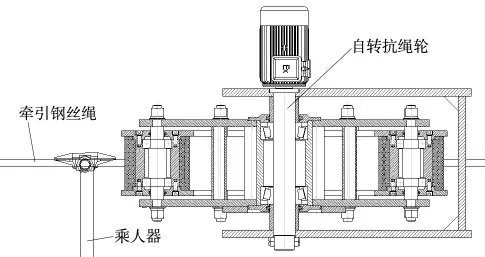
圖3 局部主視圖
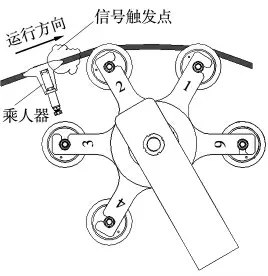
圖4 乘人器達到自轉抗繩輪前
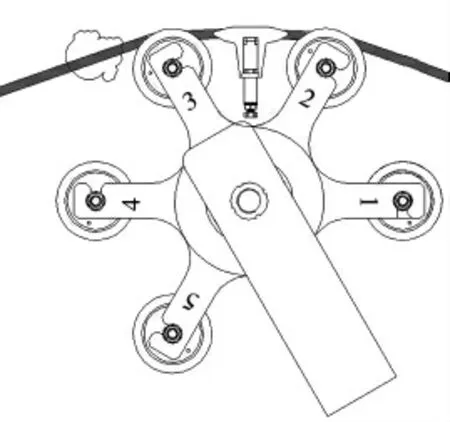
圖5 乘人器經過自轉抗繩輪(2 號、3 號滾輪接觸鋼絲繩)
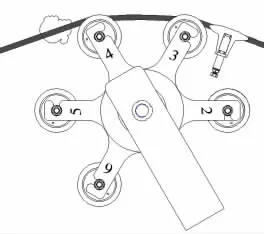
圖6 乘人器通過自轉抗繩輪(3 號、4 號滾輪接觸鋼絲繩)
圖3 中乘人器由固定抱索器、乘人吊椅組成,乘人器通過固定抱索器固定在牽引鋼絲繩上,在架空乘人裝置運行的過程中,乘人器隨著牽引鋼絲繩一起往前運行。
圖4 狀態下,乘人器在自轉抗繩輪的2 號滾輪與3 號滾輪中間的空白區域,空白區域內裝有檢測乘人器有無的信號觸發器,圖中由1 號、2 號滾輪與牽引鋼絲繩接觸,牽引鋼絲繩受1號、2 號滾輪抗繩作用,牽引鋼絲繩的運行軌跡發生平滑的角度轉變,當乘人器到達自轉抗繩輪前的信號檢測點時觸發信號,通過控制步進電機的轉動,以匹配牽引鋼絲繩運行的速度帶動自轉抗繩輪旋轉支架轉動,自轉抗繩輪旋轉支架轉動的同時,1 號、2 號滾輪在牽引鋼絲繩上發生相對位移的同時自身也在牽引鋼絲繩上滾動。
乘人器由圖4 的位置隨著牽引鋼絲繩運行到圖5 的位置,該狀態下,與牽引鋼絲繩接觸的自轉抗繩輪滾輪由1 號、2 號滾輪變成2 號、3 號滾輪,牽引鋼絲繩由架空乘人裝置的驅動裝置驅動繼續往前運行,自轉抗繩輪由步進電機驅動繼續轉動。
乘人器由圖5 所示的位置隨著牽引鋼絲繩運行到圖6 所示的位置,該狀態下,與牽引鋼絲繩接觸的自轉抗繩輪滾輪由2 號、3 號滾輪變成3 號、4 號滾輪,此時,乘人器已完全通過自轉抗繩輪,隨著牽引鋼絲繩在驅動裝置的驅動下繼續沿牽引鋼絲繩運行軌跡往前運行。當乘人器完全通過自轉抗繩輪之后,自轉抗繩輪步進電機停止工作,自轉抗繩輪停止轉動,完成一個運行周期,自轉抗繩輪轉動120°,完成乘人器在牽引鋼絲繩上的拐彎運輸。
當下一個乘人器隨著牽引鋼絲繩達到圖4 所示位置時,觸發自轉抗繩附近的信號觸發器,自轉抗繩輪、乘人器、牽引鋼絲繩重復圖4~圖6 的動作,周而復始,完成架空乘人裝置上多個乘人器在牽引鋼絲繩上的拐彎運輸。
乘人器逐步通過自轉抗繩輪完成拐彎運輸,在乘人器隨著牽引鋼絲繩整體通過自轉抗繩輪的整個過程中,乘人器不與自轉抗繩輪接觸,沒有撞擊現象,整個運行過程平穩、安全,對固定抱索器沒有撞擊損傷,保證了固定抱索器的使用安全,從而提高架空乘人裝置的安全使用性能。
圖4~圖6 所示為乘人器通過一套自轉抗繩輪的整體過程,在實際應用中,由于自轉抗繩輪滾輪輪襯的受力磨損情況,考慮自轉抗繩輪滾輪輪襯使用壽命需要達到6~12 個月,因此在設計自轉抗繩輪時,一般一套自轉抗繩輪設計成能實現牽引鋼絲繩10°的轉向,當架空乘人裝置的安裝巷道存在大角度拐彎時,可沿牽引鋼絲繩運行方向,在巷道大角度拐彎處多點緊密排列布置多組自轉抗繩輪,實現大角度巷道中牽引鋼絲繩轉向運行的目的。
4 自轉抗繩輪控制原理
如圖7 所示,當乘人器達到信號觸發點觸發信號,將信號反饋給架空乘人裝置的PLC 控制箱,PLC控制箱發出控制信號控制步進電機轉動。

圖7 自轉抗繩輪控制邏輯
(1)步進電機轉速計算。步進電機轉速:

式中 n——步進電機轉速,r/s
V——牽引鋼絲繩運行速度(架空乘人裝置設計運行速度),m/s
R——自轉抗繩輪滾輪外切圓半徑,m
i——減速機速比,架空乘人裝置選型設計值
按照式(1),根據架空乘人裝置的運行速度、特定的減速比,計算出與牽引鋼絲繩同步的轉速值,使乘人器通過自轉抗繩輪時,自轉抗繩輪與牽引鋼絲繩同步運行。
(2)步進電機運行時間計算。一個乘人器完全通過自轉抗繩輪,步進電機運行時間計算:
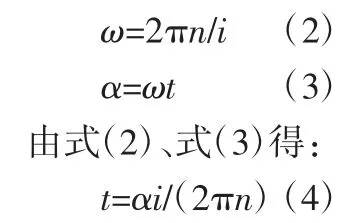
式中 n——步進電機轉速,r/s
α——單個乘人器完全通過自轉抗繩輪,自轉抗繩輪轉動的角度,取120°
ω——自轉抗繩輪運轉角速度,rad/s
i——減速機速比,架空乘人裝置選型設計值
由式(4)計算出單個乘人器完全通過自轉抗繩輪所需要的時間,即步進電機單次運行的時間。自轉抗繩輪自接受信號發生轉動開始,經過t 時長運行后停止運行,完成單次運行動作,等待下一個乘人器的到來,重復運作。
5 自轉抗繩輪應用效果
(1)不受拐彎點在架空乘人裝置安裝巷道中的位置限制。大坡度可摘掛抱索器、活動抱索器架空乘人裝置只使用于拐彎點位于巷道水平位置時的拐彎,固定抱索器配合自轉抗繩輪,當巷道拐彎點位于水平巷、斜巷時均適用。
(2)固定抱索器配合自轉抗繩輪實現拐彎的架空乘人裝置,能適應多點S 形巷道中的安裝,并經過拐彎點時,固定抱索器由牽引鋼絲繩帶動,運行過程中無撞擊,無由于輪襯磨損而造成的牽引鋼絲繩掉繩現象,運行更加安全;大坡度可摘掛抱索器配合可旋吊椅的架空乘人裝置只能適應單向拐彎巷道的安裝,且長期運行后,會出現由于輪襯磨損而造成的牽引鋼絲繩掉繩現象,存在使用安全隱患;活動抱索器配合軌道的架空乘人裝置,在通過拐彎位置時,抱索器的運行是靠其自身的運動慣性通過軌道,運行速度不可控;
(3)《煤礦安全規程》規定,架空乘人裝置中,活動抱索器類型的最大使用角度為18°,可摘掛抱索器類型的最大使用角度為25°,固定抱索器類型的最大使用角度為28°。
綜上所述,自轉抗繩輪配合固定抱索器,使得架空乘人裝置在窄巷道、沿線有多點拐彎巷道中的安裝使用具有更高的適應性、耐用性和安全性。
6 結語
自轉抗繩輪的設計,改變了以往架空乘人裝置在窄巷道、沿線有多點拐彎等復雜巷道中的安裝方式,解決了以往拐彎架空乘人裝置在長期使用中的掉繩、抱索器打滑等缺點,不受拐彎點位置及拐彎方向的限制,適應坡度大、適應巷道情況廣。提高了架空乘人裝置對礦山巷道的適應性,減少乘坐人員的受傷因素,保證架空乘人裝置的使用安全性能,具有一定的經濟、社會效益。
