白鶴灘水電站輸水發電系統水力干擾穩定性分析
2022-09-12 02:48:44陳益民程文超周建旭孫洪亮
水利水電科技進展 2022年5期
關鍵詞:系統
陳益民,程文超,周建旭,楊 飛,孫洪亮
(1.中國電建集團華東勘測設計研究院有限公司,浙江 杭州 311122; 2.河海大學水利水電學院,江蘇 南京 210098)
水電站輸水發電系統的穩定運行是保障電網安全可靠的重要前提。在水電站運行實踐中,水力系統、機械系統以及電氣系統的特性相互耦合,直接影響水電站的安全穩定運行[1]。因此,應針對水電站輸水發電系統開展全面的穩定性分析,對于兩機或多機共水力單元的情況,甩荷或增荷機組對運行機組的影響較為突出,應著重進行水力干擾穩定性分析。
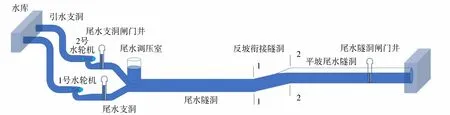
圖1 水電站輸水發電系統布置示意圖
在對水電站水力-機械系統進行穩定性分析時,常采用剛性模型或低階彈性模型[2-3]來描述水體的動態特性,并將描述系統動態特性的微分方程線性化,得到狀態方程組,通過數值求解以評估系統的穩定性和機組的調節品質[4-6],或者推導出相應的特征方程或傳遞函數,進行調節控制研究[7-9]。針對水電站穩定性,諸多學者開展了較為廣泛而深入的研究。楊建東等[10]研究了上下游雙調壓室系統穩定域的變化規律,推導出穩定域干涉點和共振點的解析公式。郭文成等[11]建立了水輪機調節系統非線性數學模型,將Hopf分岔理論應用到變頂高尾水洞水電站水輪機調節系統的穩定性研究。Yu等[12]研究了水輪機-調速器系統狀態方程的表述特征,利用矩陣變換方法,建立了一種求解狀態方程系數矩陣的新方法。Zhou等[13]針對單管單機水電站,考慮調速器不同調節方式,建立了相應的狀態方程,分析了小負荷擾動下的動態過程。翟曉娟等[14]考慮水力、機械、電氣系統的耦合作用,建立了水電機組穩定性非線性數學模型,分析了孤網運行時水電機組的水力干擾穩定性。Chen等[15]提出了一種多目標綜合指標,并使用該指標對調速器的參數進行優化,為在尾水波動條件下的穩定性分析提供了理論支持。Yu等[16]利用Jordan標準形式的狀態矩陣解耦,推導了無量綱轉輪轉速的顯式公式,采用直接求解方法,優化選擇PID控制器參數。馬安婷等[17]基于水力系統振動特性分析方法,建立輸水發電系統總體矩陣,能夠準確求解復雜輸水發電系統的運行穩定域。周建旭等[18]結合設置上下游雙調壓室的長引水式水電站輸水系統的水力特性,探討了上下游調壓室系統水力干擾穩定性等特殊水力學問題。Huang等[19]對孤立電網下復雜水電站小波動過渡過程中的調速器參數敏感性進行了研究。李玲等[20]構建了超長引水隧洞水電站單機無窮大電網的仿真模型,研究了系統的小波動穩定性。上述研究主要側重于小波動穩定性分析,而水力干擾穩定性研究相對較少。
白鶴灘水電站單機容量達百萬千瓦,機組運行水頭為163.9~243.1 m,具有單機容量巨大、運行水頭變幅大的特點。該水電站輸水發電系統采用單管單機引水、兩機共用尾水調壓室和尾水隧洞的布置方式,其中尾水系統采用“三段變坡”的形式,包括有壓尾水隧洞、坡度較大的反坡銜接隧洞和平坡尾水隧洞,而平坡尾水隧洞中會發生明流、滿流,以及明滿流現象。因此,本文基于有壓輸水系統特征線法,引入明滿流尾水隧洞瞬變流分析的特征隱式格式,以便準確描述尾水系統中可能的復雜流態,同時考慮調速器頻率調節模式,建立輸水發電系統穩定性分析和調控模型,并結合白鶴灘水電站典型水力單元開展水力干擾穩定性分析,闡明受擾機組的穩定運行及其影響因素,揭示尾水系統復雜流態對系統穩定運行的影響,為制定可靠有效的調節控制策略提供技術支撐。
1 輸水發電系統穩定性分析模型
1.1 輸水系統瞬變流分析的數學模型
白鶴灘水電站輸水發電系統布置見圖1,其尾水系統的反坡銜接隧洞和平坡尾水隧洞在過渡過程中可能出現無壓流、有壓流,以及明滿流現象。圖1中1—1斷面為反坡銜接隧洞進口斷面,2—2斷面為反坡銜接隧洞出口斷面,亦為明滿流隧洞段串聯節點。
輸水發電系統的有壓輸水部分,即從水庫進水口至反坡銜接隧洞進口(斷面1—1),采用有壓輸水系統特征線法來描述其瞬態特性,可求解出計算斷面的測壓管水頭和流量,相應的特征方程為
C+:HP=Cp-SpQP
(1)
C-:HP=Cm+SmQP
(2)
式中:H為斷面瞬時測壓管水頭;Q為斷面瞬時流量;Cp、Sp、Cm、Sm均為有壓輸水系統特征方程的已知系數;下標P對應的參數為計算節點未知量。
輸水發電系統的明滿流隧洞部分(運行尾水位低于尾水隧洞出口洞頂或在尾水隧洞出口洞頂附近),即從始終為有壓流的反坡銜接隧洞進口斷面1—1至平坡尾水隧洞出口,采用明渠水流特征隱式格式來描述其動態特性,可求解出計算斷面的瞬時水深和流量,相應的特征方程為
a1jΔhj-1+b1jΔQj-1+c1jΔhj+d1jΔQj=e1j
(3)
a2jΔhj+b2jΔQj+c2jΔhj+1+d2jΔQj+1=e2j
(4)
式中:Δh、ΔQ分別為斷面水深和流量的增量形式;aij、bij、cij、dij均為系數(i=1,2);下標j為計算斷面編號。
基于特征方程(3)和(4),結合尾水閘門井節點的流量連續條件、水頭平衡條件和閘門井水位波動方程,可建立尾水閘門井邊界的數學模型;同時,考慮反坡銜接隧洞進口斷面、明滿流隧洞串聯節點、明滿流隧洞出口的流量連續條件和水頭平衡條件,建立相應邊界的數學模型。
有壓輸水和明滿流模擬段的交界面(即始終為有壓流的反坡銜接隧洞進口斷面1—1),滿足流量連續條件和水頭平衡條件(即有壓模擬段出口斷面流量等于明滿流模擬段進口流量,以及有壓模擬段出口測壓管水頭等于明滿流模擬段進口水深加上洞底高程),據此可建立融合有壓輸水系統特征線法和明滿流隧洞特征隱式格式的輸水系統瞬變流分析模型。在瞬變流計算分析過程中,若明滿流模擬段某計算斷面的瞬時水深近似等于斷面洞高,則該計算斷面為明滿流分界面。
1.2 水輪發電機組的動態分析模型
白鶴灘水電站輸水發電系統的穩定性分析模型應能夠準確描述百萬千瓦機組的綜合特性及其對系統運行穩定性的影響。白鶴灘水電站左岸輸水發電系統的水輪機型號為D545A-F15,結合機組模型特性曲線,可得到反映水輪機全特性的離散數據,包括流量特性Q11=f1(n11,a)和效率特性η=f2(n11,a),其中Q11、n11、η和a分別為機組單位流量、單位轉速、效率和導葉開度,f1和f2表示不同的函數關系,見圖2。

圖2 水輪機D545A-F15綜合特性曲線
白鶴灘水電站右岸輸水發電系統的水輪機型號為A1181a,其全特性曲線見圖3,包括流量全特性曲線Q11=f1(n11,a)和力矩全特性曲線T11=f3(n11,a),其中T11為機組單位力矩。
描述機組節點的方程有:
H=(Cp1-Cm2)-(Sp1+Sm2)Q
(5)
P=γQHη
(6)
(7)
(8)
(9)
式中:H、Q、P、n分別為機組運行水頭、流量、出力、轉速;γ為水的容重;D1為轉輪直徑;Cp1、Sp1、Cm2和Sm2均為基于有壓輸水系統特征方程的已知系數。
結合式(5)~式(9),以及水輪機模型綜合特性曲線Q11=f1(n11,a)和η=f2(n11,a)(左岸機組),或者Q11=f1(n11,a)和T11=f3(n11,a)(右岸機組),則可求解得到任一瞬時水輪機節點的相關參數,包括蝸殼進口測壓管水頭和流量、尾水管進口測壓管水頭和流量、機組瞬時出力或力矩等。
描述擾動機組動態特性的狀態方程為
(10)

式中:φ、p分別為機組相對轉速變化量和相對出力變化量;t為時間;x為外擾動;Sg為負荷自調節系數;Tm為機組啟動時間常數;P0、n0、GD2分別為機組初始出力、初始轉速和轉動慣量。基于式(10)和機組的綜合特性,可得到受擾機組的瞬時轉速。
1.3 調速器的狀態方程
考慮到白鶴灘水電站在電網中的重要性和機組的運行穩定性要求,基于調速器的頻率調節模式,進行系統的調節控制分析。在頻率調節模式下,調速器采用PID調節規律,將導葉開度作為反饋值,實時跟蹤機組實際功率。將調速器頻率調節模式的狀態方程[13]耦合機組的狀態方程(10)以及輸入擾動,即可確定機組和調速器的狀態變量值,包括機組導葉相對開度等。
1.4 融合輸水系統復雜瞬變流分析的輸水發電系統調控模型
融合輸水系統明滿流等復雜瞬變流分析的數學模型、考慮機組綜合特性的水輪發電機組動態分析模型和調速器頻率調節模式的狀態方程,構建形成白鶴灘水電站百萬千瓦機組及輸水發電系統的調節控制模型。

表2 左岸1號水力單元水力干擾過渡過程調節品質
基于所建立的白鶴灘水電站輸水發電系統調節控制模型,進行水力-機械系統水力干擾穩定性分析,能夠準確反映擾動機組和輸水系統瞬態參數的較大幅度變化,以及受擾機組參數的動態變化過程和調節品質,并直觀揭示輸水發電系統在水力耦合下的水力干擾特性,特別是受擾機組的動態特性。
2 輸水發電系統水力干擾穩定性
2.1 白鶴灘水電站參數
白鶴灘水電站地下廠房采用首部開發方式,左、右岸輸水發電系統的布置格局相同,各布置8臺混流式水輪發電機組,分為4個水力單元,引水系統采用單洞單機布置方式,尾水系統采用兩機合一洞的布置方式,典型水力單元布置如圖1所示。電站左岸水輪機型號為D545A-F15,單機額定出力為1 015 MW,額定流量為545.49 m3/s,額定水頭為202 m,額定轉速為111.1 r/min,轉動慣量為36萬 t·m2;左岸1號水力單元引水道長度l1為480.50 m,尾水支洞長度l2為259.75 m,尾水隧洞總長度l3為1 695.80 m。右岸水輪機型號為A1181a,單機額定出力為1 015 MW,額定流量為538.80 為m3/s,額定水頭為202 m,額定轉速為107.1 r/min,轉動慣量為37萬t·m2;右岸8號水力單元引水道長度l1為486.12 m,尾水支洞長度l2為240.15 m,尾水隧洞總長度l3為1 769.87 m。左岸1號和右岸8號水力單元尾水隧洞出口頂高程均為592.0 m,尾水調壓室有效面積均為1 590.43 m2。
2.2 水力干擾分析工況
結合白鶴灘水電站典型水力單元,開展水力干擾過渡過程計算分析,評估發生水力干擾時運行機組的運行穩定性以及調節品質。已知調速器調節參數的整定值為:永態轉差系數bp=0.04,相應比例常數KB=2.5、積分常數KI=0.385 1/s、微分常數KD=2.5 s。
表1給出了白鶴灘水電站左岸和右岸控制輸水發電系統水力干擾穩定性分析的典型工況,其中工況D1和D2水庫水位一列分別對應左岸1號和右岸8號水力單元的數值。

表1 水力干擾工況
2.3 受擾機組穩定性和調節品質分析
結合白鶴灘水電站左岸1號和右岸8號水力單元,以及相應的機組特性和導葉啟閉規律,結合表1給出的水力干擾穩定性分析工況,進行受擾機組的運行穩定性分析,調節品質分析見表2和表3,表中給出了對應轉速偏差為±0.2%和±0.4%時的調節時間。典型工況頻率調節模式下受擾機組的轉速和機組出力的動態過程見圖4和圖5。
圖4和圖5表明:依據整定的調速器參數、電網負荷自調節系數等相關參數,左岸1號和右岸8號水力單元受擾機組轉速是衰減的,水力干擾過渡過程是穩定的;受擾機組的出力發生明顯的擺動,最大出力均未超出額定出力的105%,且超出力歷時較短;受擾機組轉速的衰減度均小于90%。隨著機組運行水頭的增大,受擾機組的調節品質明顯改善,主要表現為調節時間縮短,振蕩次數減小,最大偏差減小和衰減度增大,即甩荷工況D3相較于D1,增荷工況D4相較于D2,機組運行水頭較大,受擾機組轉速的波動明顯減小,衰減明顯加快。因工況D1運行水頭明顯較低,機組轉速和出力動態過程振蕩幅度較大,穩定性較差,同時工況D1對應運行開度為額定開度,受擾過程中受調速器接力器行程限制的影響,故工況D1和D3的水力干擾過渡過程存在較大差別。

表3 右岸8號水力單元水力干擾過渡過程調節品質分析

圖4 左岸1號水力單元受擾機組轉速、出力動態過程

圖5 右岸8號水力單元受擾機組轉速、出力動態過程
2.4 尾水隧洞典型流態對系統穩定性的影響
左岸1號和右岸8號水力單元尾水隧洞洞頂高程為592.00 m,工況D1和D2尾水位為597.42 m,工況D3和D4尾水位為581.50 m,因此工況D1和D2尾水系統全線為有壓流流態,而工況D3和D4在反坡銜接隧洞段出現明滿交替流流態,高程較高的平坡尾水隧洞段出現明流流態。圖6和圖7分別給出左岸1號水力單元各工況尾水調壓室水位和左/右岸典型水力單元明滿流分界面動態過程線,以分析尾水隧洞典型流態對系統穩定性的影響。

圖6 尾水調壓室水位動態過程線

圖7 明滿流分界面動態過程線
圖6表明:機組額定出力運行時,工況D1和D2運行水頭相對較低,運行流量較大,調壓室水位波動幅度較大,且增荷工況衰減較快;因工況D1和D2尾水隧洞全線有壓,調壓室水位波動周期較長,而工況D3和D4尾水隧洞下游段為明滿流段或明流段,有壓段長度縮短,調壓室水位波動周期較短,同時運行水頭相對較高,調壓室水位穩定時間明顯縮短,有利于系統的運行穩定性。圖7表明:工況D3和D4尾水系統中出現明滿流流態,對應的明滿流分界面位于反坡銜接隧洞段,即在斷面1—1和斷面2—2之間移動,其下游側始終為無壓流,并且很快趨于穩定。
2.5 機組型號對系統穩定性的影響
白鶴灘水電站左岸1號水力單元的機組型號為D545A-F15,右岸8號水力單元的機組型號為A1181a。通過對比不同型號機組在相同工況下的機組轉速和反坡銜接隧洞出口斷面2—2測壓管水頭動態過程,分析不同機組型號時系統的水力干擾穩定性。圖8和圖9分別給出了甩荷工況D1和D3下機組轉速變化相對量φ和反坡銜接隧洞出口(斷面2—2)測壓管水頭H2變化過程線。

圖8 工況D1下受擾機組轉速及斷面2—2測壓管水頭動態過程
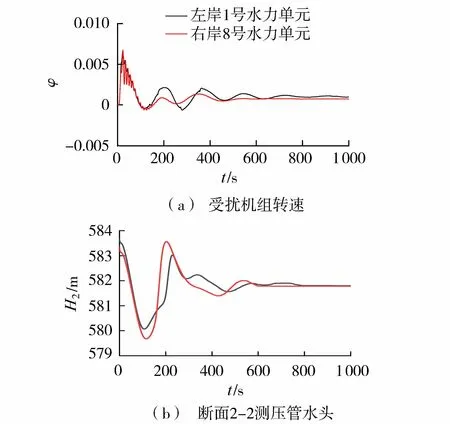
圖9 工況D3下受擾機組轉速及斷面2—2測壓管水頭動態過程
圖8和圖9表明:在機組甩荷條件下,工況D1轉速變化相對值的動態變化趨勢基本一致,對應的機組調節品質評價指標接近(表2、表3),而工況D3轉速變化相對值衰減過程存在較明顯的差別,即不同機組型號下,第1個調節周期內機組最大轉速不同和振蕩衰減趨勢明顯不一致,在調節過程中相關參數動態過程亦受不同的尾水隧洞明滿流過渡段和明流段的影響;左岸1號和右岸8號水力單元輸水系統特別是尾水系統布置存在一定的差異,其中8號水力單元尾水隧洞較長,表現出兩個水力單元銜接隧洞出口斷面2—2測壓管水頭的變化趨勢基本一致,其中工況D1銜接隧洞出口斷面為有壓狀態,呈周期性振蕩衰減,右岸8號水力單元對應的振蕩周期略長,工況D3銜接隧洞出口斷面為無壓狀態,測壓管水頭快速衰減并趨于穩定。
3 結 論
a.依據整定的調速器參數、電網負荷自調節系數等相關參數,考慮尾水系統多流態特性,白鶴灘水電站典型輸水發電系統水力干擾過渡過程是穩定的,隨著機組運行水頭的逐漸增大,受擾機組的調節品質逐步改善。
b.機組運行水頭相對較低且尾水系統全線有壓時,尾水系統銜接隧洞出口斷面測壓管水頭呈周期性振蕩衰減,而運行水頭較高且尾水隧洞下游段為明滿流段或明流段時,尾水系統銜接隧洞出口斷面流態為明流,測壓管水頭呈快速趨于穩定的動態過程。
c.在機組甩荷條件下,左岸1號和右岸8號水力單元不同機組型號對應的轉速、尾水系統銜接隧洞出口斷面測壓管水頭的動態變化趨勢基本一致,對應的機組調節品質評價指標接近,表明兩種機組型號對應水力干擾穩定性和受擾機組調節品質接近。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32