基于超聲法清洗的管道蛇形機器人研究
2022-09-15 09:14:26王斌郭巖寶于海文楊玉成王德國
機床與液壓 2022年11期
王斌,郭巖寶,于海文,楊玉成,王德國
(1.中國石油大學(北京)機械與儲運工程學院,北京 102249;2.中國石油天然氣集團有限公司,北京 100007)
0 前言
管道作為一種運輸工具在石油、天然氣等行業發揮著重要作用,然而在工況環境經過較長時間后,管道內壁會出現石蠟、淤泥、碳酸鹽、油垢等物質的結塊甚至堵塞,嚴重影響石油和天然氣的運輸,甚至可能造成嚴重事故。管道的檢測和清洗工作可以有效及時地避免事故的發生,然而傳統靠人工機械方式檢測和清洗浪費大量的人力物力,既不經濟,安全性也差。因此,管道清潔機器人進入油氣領域,用于完成清潔工作。
國內外科研工作者經過長時間努力,設計了不同的管道清潔機器人。潘劍鋒等研究了一種基于絲杠螺母的足式管道清潔機器人,可以在變徑管道內行走。TANISE等改進了蠕動爬行機器人清掃管道行走性能。 ITO等開發了一種應用于實際環境的蠕動式管道清潔機器人,有效提高了清潔效率。譚益松等研究了一種仿尺蠖式氣壓驅動管道清潔機器人,該機器人結構簡單,可實現遠距離復雜管道的清潔工作。目前,市場上出現了一些利用超聲波方法來清洗管道的清洗機。然而,該類清洗機體型龐大、移動困難、清潔效率低,現有的機器人利用機械式清洗方法清潔效果不好,不能徹底將污垢清除,且移動范圍有限,不能適用于各種復雜管道。
考慮到油氣管道環境的需求,設計以STM32單片機為控制核心、多個模塊融合的基于超聲波法的管道清潔蛇形機器人。本文作者從機械結構和控制系統兩方面分析該機器人特點,通過數理計算分析該機器人在變徑管道中的直行、轉彎運動效果以及螺旋槳提供的動力;通過MATLAB仿真分析蛇形機器人蜿蜒前行的影響因素,并通過正交試驗法檢驗該機器人清潔污垢的效果。
1 機械結構設計
本文作者設計的基于超聲波法的管道蛇形清潔機器人主要由四部分結構組成:前驅動肢體、肢體運動關節、后驅動肢體和旋轉掃尾結構。圖1所示為該機器人的整體結構。
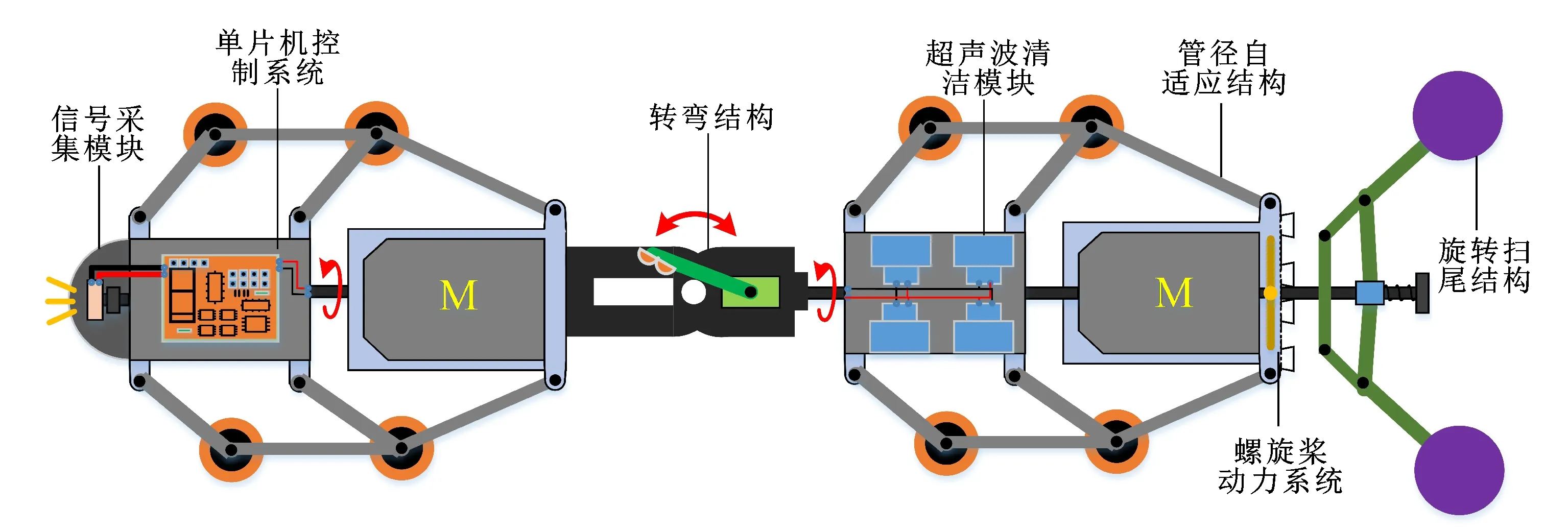
圖1 機器人整體結構
1.1 肢體運動關節設計
機器人肢體的轉彎及擺動主要靠肢體運動關節實現。如圖2所示,該關節由兩個分別連接前后驅動肢體的轉動固件連接組成,在與后驅動肢體相連的轉動固件上安裝有大扭矩舵機,舵機的轉臂與另外的轉動固件以焊接形式連接,可控制前驅動肢體實現180°轉動。后驅動肢體與絲杠連接,可實現圓周翻轉。機器人的轉彎運動可先控制絲杠轉動使機器人前驅動肢體旋轉90°,然后控制舵機擺動90°,在一個電機和一個舵機配合控制下實現在T形管道內的轉彎運動。
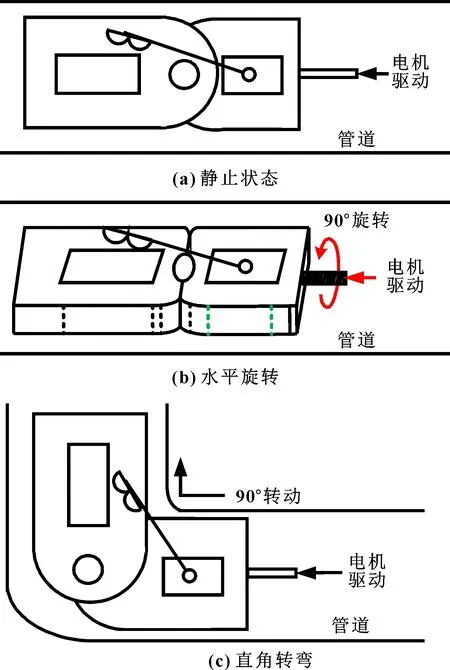
圖2 肢體運動關節示意
1.2 管徑自適應驅動裝置設計
管徑自適應驅動裝置通過帶動與伺服電機固定連接的絲杠轉動,帶動與絲杠配合的超聲波清洗腔體的滑套向左右滑動,促使自適應連桿平移,實現可在不同管徑內移動的目的。如圖3(a)所示,自適應裝置上的4個輪子具有防滑特性,輪子軸心位置裝有扭簧,機器人可以在管道內前進移動。
確定自適應裝置適應的管道范圍需考慮2種必要條件,即==和=≠。在==的情況下,當自適應裝置處于使4個輪都支撐在管道內壁位置時,運動機構可簡化成圖3(a)。將機器人在最大管徑時的位置作為初始位置,其中=0,根據設計要求,===,絲杠螺距為、長為,電機旋轉圈數為,得:
=
(1)
點到的距離為

(2)
根據圖3,得:

(3)
從而得到可支撐的半徑與的關系:

(4)
可達最大半徑:

(5)

(6)
故管徑的范圍為

(7)
在=≠情況下,自適應裝置可能會最大程度適應管徑。如圖3(b)所示,當垂直于時,可適應的最大半徑為
=+
(8)
為檢驗范圍,假設處在如圖3(b)的直角位置,存在的三角函數定式為

(9)
則可得:

(10)
長度隨的變化而變化,即隨著絲杠轉動的圈數變化。當=0時,的值最大,可適應最大半徑,即當垂直于時,電機的絲杠在初始位置(=0)。當與平行時,管徑可適應的值最小,即:
=
(11)
機器人的前進推力靠后驅動肢體的渦輪螺旋槳提供,如圖3(c)所示。假設管道內液體的流速很小可忽略不計,通過公式計算可求得螺旋槳轉動對機器人產生的有效推力和所需功率,從而判斷其設計是否合理。螺旋槳的直徑為,推力系數為,轉矩系數為,電機的轉速為,相對旋轉效率為,則淌水額定轉矩為
=()/(2π)
(12)
螺旋槳的轉速為

(13)
螺旋槳產生的總推力為
=
(14)
螺旋槳在管道內產生有效推力為
=(1-)=(1-)
(15)
機器人螺旋槳收到的功率即電機可產生的功率為
(16)
根據螺旋槳的螺旋部分剖視圖分析其剛體變換。如圖3(c)所示,點為末端旋轉軸上的一點,點為旋轉軸上的某一點,螺旋槳在以單位角速度旋轉運動時,點的線速度為
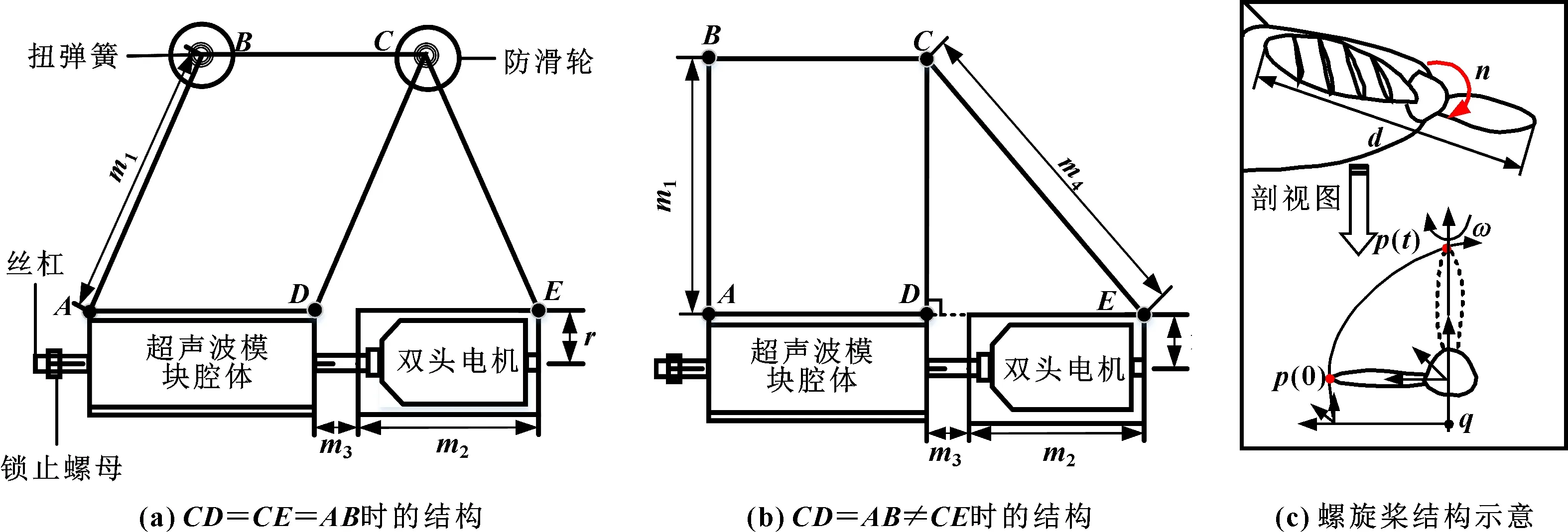
圖3 后驅動肢體各結構示意

(17)
(18)
將式(17)轉化為
(19)
求解得:
(20)

1.3 清潔裝置設計
文中所設計的機器人清潔裝置由兩部分組成:超聲波清洗模塊和清除污垢模塊。如圖4所示,超聲波清洗模塊由超聲波換能器和超聲波發生器搭配集成電路組成,超聲波換能器與機器人的超聲波清洗模塊腔體內壁緊貼。該機器人為有纜式機器人,PC上位機和超聲波發生器在管道外,通過電纜與機器人連接。

圖4 清潔裝置流程示意
在超聲波換能器的作用下將聲能轉換成機械振動,從而將超聲波能量輻射到管道內的液體中。當液體受到超聲波振蕩后會產生許多空化氣泡,氣泡的形成到破裂會積攢能量,當氣泡破裂時,能量會大量釋放從而產生極大的沖擊波,振碎附著在管道內壁結固的污垢;隨著機器人的前進,旋轉掃尾結構在電機帶動下旋轉運動,該結構的頭部由吸油海綿構成,可吸附被振碎的污垢,這種雙層清潔的方式可以徹底清潔污垢。
1.4 波形推進函數
本文作者研究該機器人的運動軌跡,設計其運動曲線。該機器人的關節采用單自由度,根據機器人移動時的曲線,基于Serpenoid原理,確定其波形推進函數。
Serpenoid曲線的曲率方程為

(21)
式中:為機器人在移動過程中走出的S形狀的數目;為機器人的身長;為機器人在曲線方向上的位移;為機器人轉過的彎角。在文中,為機器人開始移動時的彎角。
為方便研究和計算,可將式(21)簡化為
()=-sin()+
(22)
將曲率公式積分可得偏轉角公式,即對式(22)積分,可得清潔機器人前進時頭部相對于直行方向的偏轉角方程。

(23)
由式(23)可知,固定參數和的值,參數變化,相對應的Serpenoid曲線也隨之改變。由此可得,、不變時,值越大,清潔機器人前進過程中擺動的幅值越大,并且單個S波形越長。
2 控制系統設計
2.1 控制系統結構
為滿足機器人對于油氣管道內作業的控制需求,設計其控制系統的總體結構。如圖5所示,監控系統通過有線電纜將指令發送給主控系統,主控系統檢測到管道內環境的數據信號和傳感器反饋信號后再反饋給監控系統,定位系統采用GPS模塊進行定位,當主控系統接收到監控系統發出的指令后,可以控制從動系統完成機器人在管道內的移動、清潔等功能。
圖5 機器人控制系統結構
2.2 機器人控制系統設計
所設計的機器人控制系統具備信息監測和反饋功能,程序運行流程如圖6所示。機器人電源啟動后,控制系統初始化設置,同時檢測程序故障問題,如果程序有故障將會自動復位。程序檢測程序合格后,單片機主控系統打開,控制機器人開始在管道內移動并檢測管道內信息,同時將信息數據反饋給檢測系統。當機器人檢測到管道內壁有油污時,主控系統進行數據處理分析并作出判斷,控制清洗模塊啟動,檢測系統會循環檢測污垢是否被清洗干凈以判斷是否結束程序。

圖6 控制系統流程
3 機器人超聲波清洗正交試驗
文中采用正交試驗法研究超聲波頻率、超聲波功率和清洗時間對清洗效果的影響。為簡單有效地檢測清洗效果,試驗在由亞克力材料制作的透明管道內進行。管直徑10 cm、長度30 cm,而且兩端封口。管道內放置有清洗液,液面深度為6 cm。機器人由超聲波清洗模塊、可調頻率和功率的超聲波發生器和超聲波換能器組成,試驗臺如圖7所示。試驗變量:超聲波頻率分別為40、180、320、460 Hz;超聲波功率分別為0.1、0.25 、0.4 、0.65 W/cm;清洗時間分別為10、20、30、40、50 min。對照組為機械式清洗方式,將石蠟、碳酸鹽、泥沙和石油焦的混合物涂抹在管道內壁,厚度為3 cm。 清洗試驗在室溫(25 ℃)環境下進行,每組試驗重復進行3次,數據取平均值。
圖7 正交試驗臺示意
4 結果與討論
4.1 步態控制仿真
通過MATLAB軟件研究波形推進函數中、、與曲線的關系,在固定參數不變的情況下分別繪制Serpenoid曲線。圖8(a)為在、固定不變的狀態下,通過改變繪制的函數曲線。可得:在、固定不變的情況下,與蜿蜒曲線的幅值以及單個S波的波長度呈正相關。圖8(b)為在、固定不變的情況下,通過改變繪制的函數曲線。可得:當、固定不變時,與曲線的振幅以及S波的波長呈負相關。圖8(c)為固定參數、的值,根據的取值得到的Serpenoid曲線。可得:在、不變的情況下,與方向偏轉量呈正相關。
圖8 Serpenoid函數曲線
4.2 清洗效果
試驗結果表明:超聲波清洗的時間、頻率以及功率都與清洗的效果有關。根據清洗數據繪制清洗效果曲線如圖9所示。可知:清洗時間與清洗效果呈正相關;超聲波頻率與清洗效果呈正相關;整體超聲波清洗效果強于機械清洗,但在超聲波功率超過0.4 W/cm后,清洗效果與功率呈反比關系。
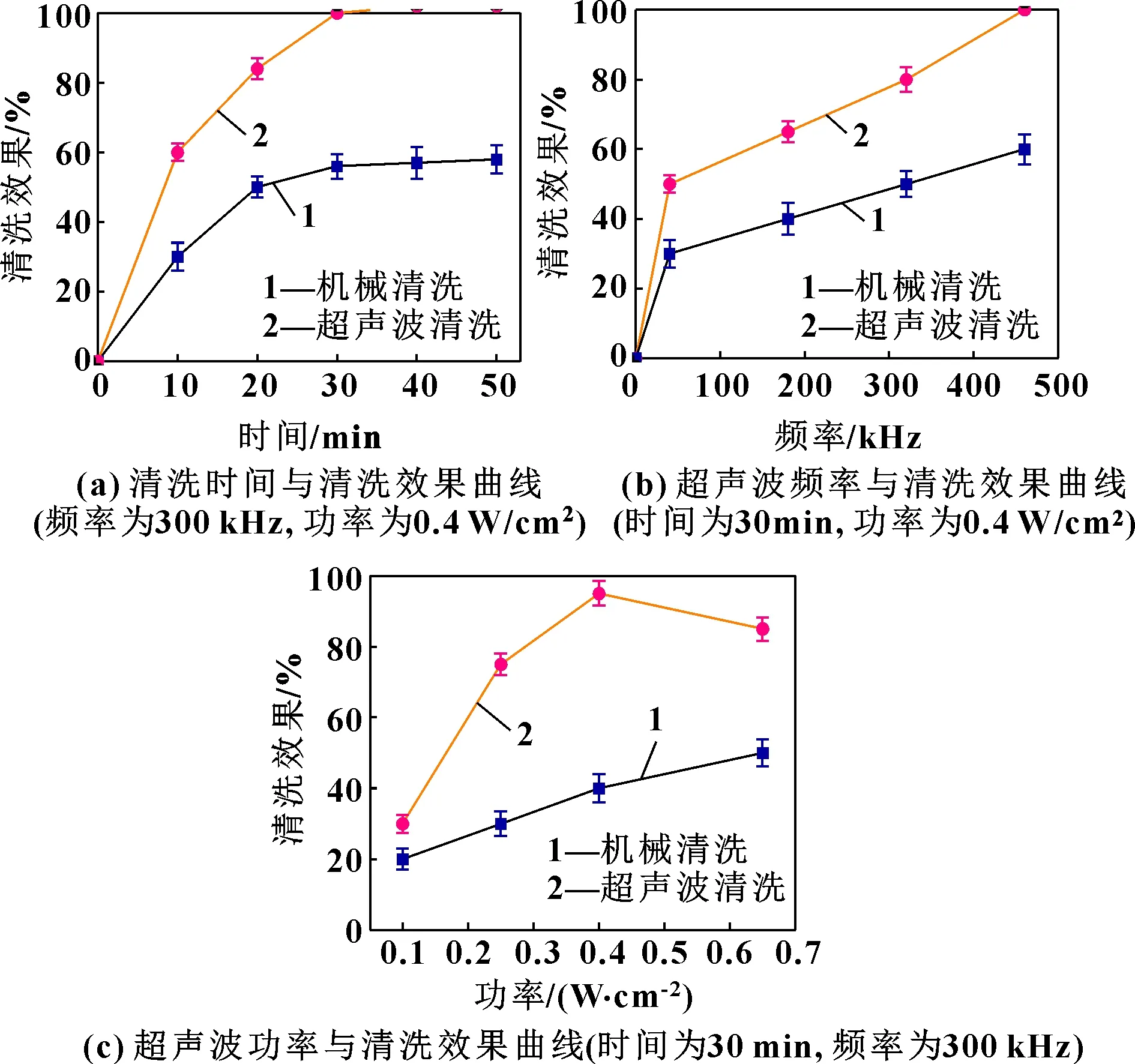
圖9 清洗效果曲線
綜合上述分析結果,得出該基于超聲波法的管道清潔機器人的清潔效果較好,設置清洗時間為20~30 min、超聲波頻率為300~500 kHz、超聲波功率為0.25~0.4 W/cm時,可達到最佳清潔效果。
5 結論
本文作者對基于超聲波法的管道蛇形清潔機器人進行了結構和控制系統設計,使其具備能夠在變徑、T形管內運動和完成超聲波-機械雙重清潔的功能。通過數理計算確定合適的變徑管道直徑范圍、螺旋槳驅動力和轉彎角度,驗證該機器人能在變徑管道內順利完成直行以及轉彎任務。通過MATLAB軟件對該機器人的步態運動進行仿真,繪制了Serpenoid曲線,證明了Serpenoid曲線函數中、分別對機器人蜿蜒運動的幅值、振幅和偏轉方向呈正相關;呈負相關。通過超聲波清洗正交試驗,證明了超聲波頻率、超聲波功率以及清洗時間都會影響其清洗效果,該類超聲波-機械清洗方式能有效清除管道內污垢,驗證了該類機器人具有較好的擴展性和可行性。研究結果為管道的清洗提供了參考。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中華詩詞(2018年11期)2018-03-26 06:41:34
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫藥科學(2015年19期)2015-02-27 12:33:11
