氣動軟體管道機器人步態規劃與實驗
2022-09-15 09:14:28宋懋征劉曉敏趙云偉田德寶秦鵬
機床與液壓 2022年11期
宋懋征,劉曉敏,趙云偉,田德寶,秦鵬
(北華大學機械工程學院,吉林吉林 132021)
0 前言
軟體管道機器人具有穩定性好、結構簡單和靈活性高的特點,在醫療衛生、化學化工和石油工業等領域具有廣泛的應用前景。為提高管道機器人在多種工作環境下的工作效率,近年來國內外學者對各種管道機器人,如輪式、履帶式、蠕動式等機器人,其行進步態進行了深入研究。VERMA等仿照蠕蟲的運動機制,通過6種狀態的周期性驅動實現機器人在管道內的爬行。SUN等建立了可應用于蛇形機器人運動的步態,提出了一種基于ser-penoid曲線的蠕動步態模型。上海工程技術大學張春燕等設計了一種連桿組成的蠕動式管道機器人,探究管道內蠕動機構的移動方式,并規劃了蠕動步態。上述規劃的機器人步態僅針對機器人單一任務進行設計,缺乏適應不同工作環境的爬行步態。為提高機器人在管道內作業的靈活性與適應性,需針對不同作業任務規劃不同的步態。
本文作者基于兩種氣動軟體驅動器設計一種氣動柔性管道機器人,設計其步態進行實驗驗證,并在實驗室環境下進行管道清障實驗。
1 機器人結構與功能
文中設計的氣動軟體管道機器人本體主要由足部、軀干及通氣管組成,其結構如圖1所示。足與軀干分別由2個徑向膨脹軟體驅動器和1個軸向伸縮軟體驅動器組成[見圖1(a)];軀干與兩足部之間通過凸型臺嵌入式裝配,且各個驅動器的通氣管采用內嵌式插管方式,后經氣管整合裝置與外部氣源連接[見圖1(b)]。

圖1 氣動柔性管道機器人結構
充氣后,足部驅動器發生徑向膨脹變形支撐管壁,軀干驅動器軸向伸長,推動機器人前行。機器人在規劃的步態下,可完成檢測、清障和物料輸送等作業。機器人材料及性能參數見表1。
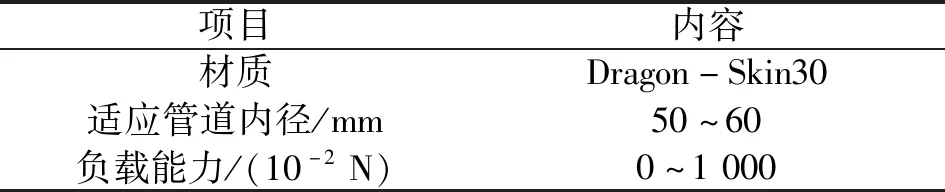
表1 管道機器人材料及性能參數
2 步態規劃
機器人在不同作業環境中,需要規劃相應的運動步態。如在障礙清除作業(圖2)中,機器人未到達工作區域時,需要快速前行;抵達障礙清除區域后,需要較強的輸出力清除障礙物。為此規劃2種運動步態,分別為快速移動步態與載荷作業步態。

圖2 作業中的步態規劃
2種步態的時序圖及動作見圖3和圖4。圖3為載荷作業步態時序圖,為使機器人獲得較強的障礙清除能力,各驅動器依次逐一完成充放氣動作,該時序下機器人運動分為6步。初始狀態下,后足驅動器充氣膨脹,抵住管壁[圖3(a)];時間,軀干驅動器開始充氣伸長[圖3(b)];時間前足驅動器充氣膨脹直至貼緊管壁[圖3(c)];—時間,后足驅動器先放氣收縮[圖3(d)],軀干驅動器放氣縮回[圖3(e)];最后—時間,后足驅動器充氣膨脹[圖3(f)],抵住管壁后,前足驅動器放氣收縮,回到原始狀態[圖3(g)];至此機器人完成了一個周期性的前進運動,前進位移為Δ。
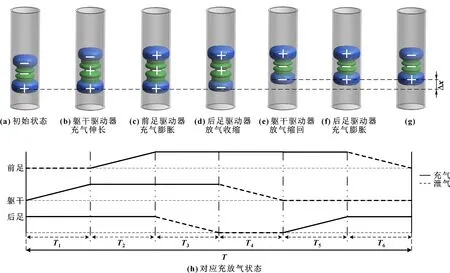
圖3 載荷作業步態
為實現在管道內的快速移動或完成快速檢測工作,根據不同驅動器充放氣時長采用多個驅動器交叉充放氣,縮短機器人運動周期(圖4)。該步態下機器人運動共分為4步:初始狀態下,前足與后足都處于膨脹狀態[圖4(a)],時間,前足泄氣過程中,軀干于12時間開始充氣伸長[圖4(b)];時間,前足泄氣后馬上充氣膨脹[圖4(c)],軀干充氣至1/2;時間,后足開始放氣收縮,在12時間,軀干泄氣回縮[圖4(d)];1/2時間,后足開始充氣膨脹,抵住管壁[圖4(e)]。

圖4 快速移動步態
對比2種步態,快速移動步態的運動步數少于載荷作業步態,且機器人運動周期短,速度較快,可適用于在管道內的快速移動或快速檢測工作;而載荷作業步態中,足部與管壁充分接觸,可提供較大的接觸力,用于載荷作業。
3 實驗與分析
運動檢測平臺主要由氣壓控制系統、三維運動捕捉系統及計算機等組成。運動學實驗原理如圖5所示。通過該運動學實驗平臺可進行機器人步態實驗和載荷實驗,測試機器人在不同步態下的運動性能,獲得機器人運動位移和速度。具體實驗參數如表2所示。
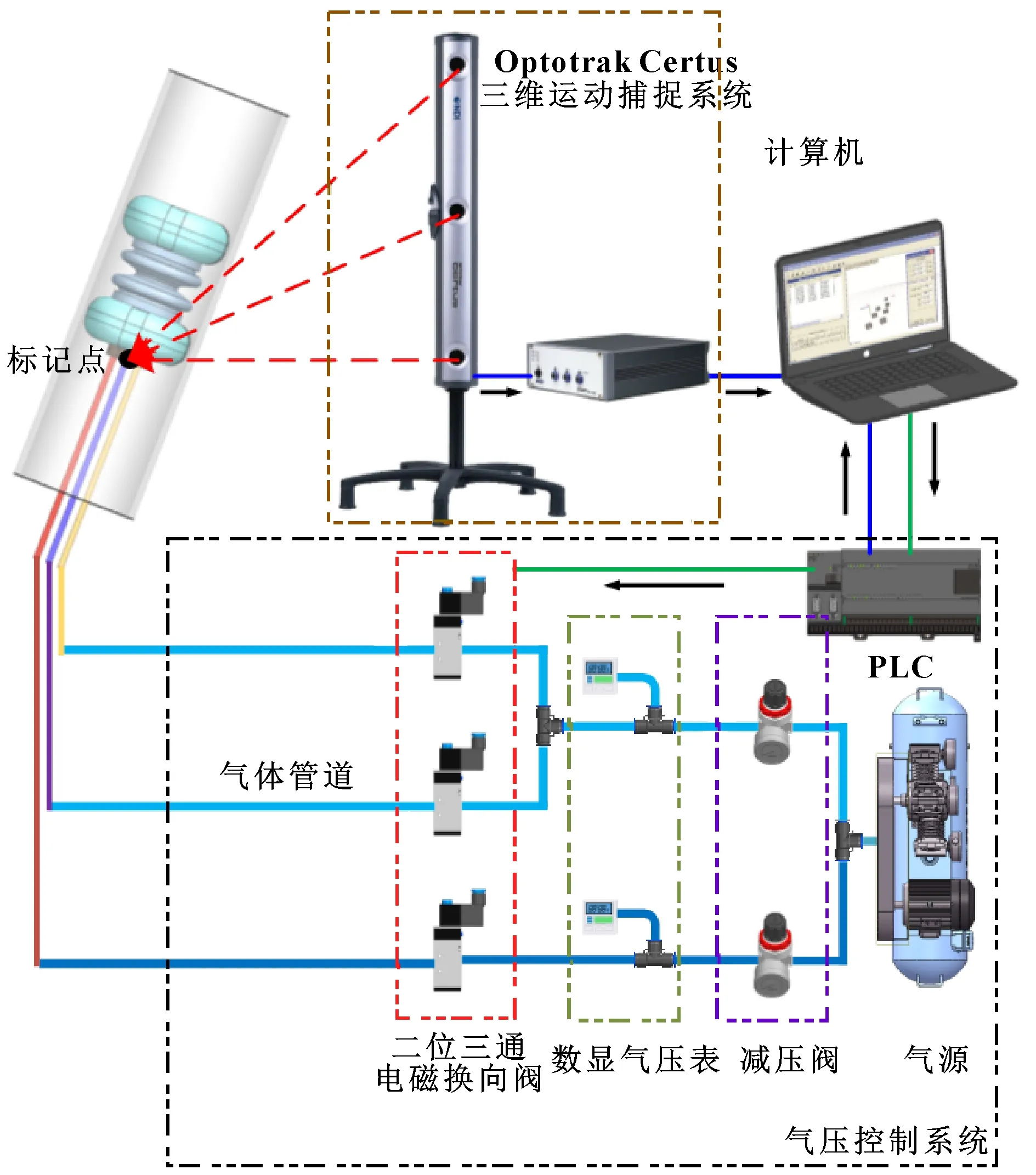
圖5 運動學實驗原理
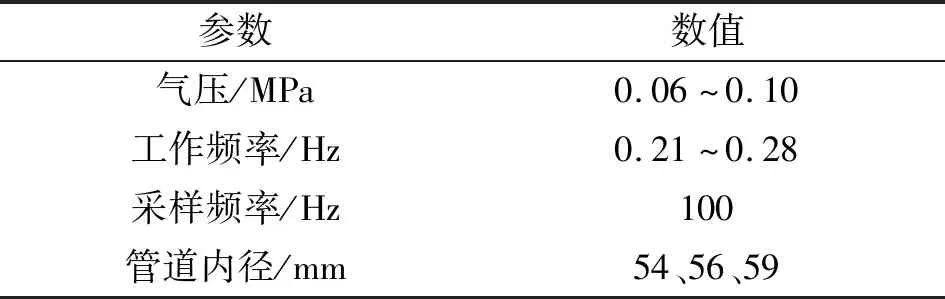
表2 實驗條件
3.1 步態應用
圖6為在步頻1.25 Hz下,機器人在2種步態下位移隨時間變化曲線。由時序圖(圖3、圖4)可知:在相同步頻下,快速移動步態較載荷作業步態運動步數少,運動周期較短。與載荷作業步態比,快速移動步態的移動速度明顯高于載荷作業步態,分別可達3.22、2.66 mm/s。
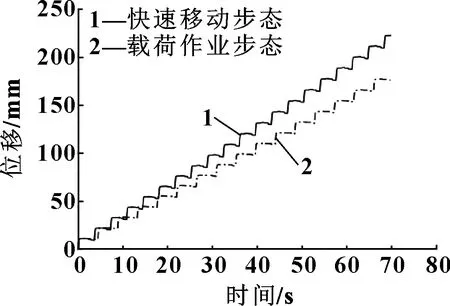
圖6 不同步態下機器人前進位移隨時間變化曲線
圖7為2種步態下,足部與管壁接觸力隨時間變化曲線,其接觸力由六維力傳感器測得。由圖7可知:快速移動步態下,由于充放氣交替變換,足部與管壁未充分接觸[圖4(b)和圖4(d)];而載荷作業步態下,其足部與管壁有充分接觸時間,可提供足夠的支撐力,適用于載荷作業。快速移動步態和載荷作業步態下足部驅動器與管壁的最大接觸力分別為7.98、8.20 N。

圖7 不同步態下足部與管壁接觸力隨時間變化曲線
3.2 步態適應性
(1)快速移動步態
圖8為應用快速移動步態,機器人在不同工況下在管道內的位移。可知:機器人在快速移動步態下,可在水平、傾斜45°和垂直管道中穩定爬行,其速度分別為4.03、5.03、5.50 mm/s。

圖8 不同工況下機器人前進位移隨時間變化曲線
(2)載荷作業步態
機器人負載作業時,需要足夠的負載能力。機器人在步頻1.25 Hz下,驅動器工作氣壓如表3所示。

表3 障礙下各驅動器工作壓力參數
由圖9可知:載荷作業步態下,機器人在不同負載下可穩定前行,最大負載能力10 N,其速度為1.23 mm/s。
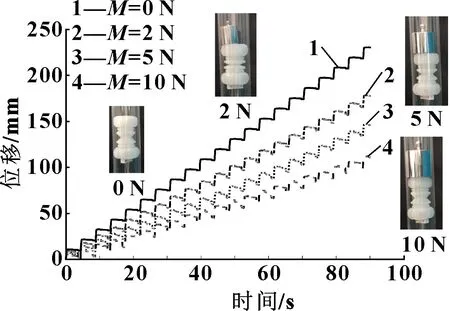
圖9 不同負載下機器人前進位移隨時間變化曲線
圖10為在步頻1.25 Hz且負載2 N下,在不同截面的管道機器人前進位移曲線。機器人在圓形管、正方形管和三角形管中爬行時,其足部氣壓分別為0.075、0.085、0.095 MPa。由圖10可知:面對不同截面的管道,在載荷作業步態下,機器人足部可提供足夠的接觸力(圖7),可在三角形、正方形和圓形管道中穩定前行,其速度分別為2.02、2.34、2.69 mm/s。

圖10 不同截面管道下機器人負載前行
圖11為管道機器人在步頻1.25 Hz下,在內徑尺寸為54、56和59 mm的管道中的爬行位移曲線,機器人足部氣壓分別設定為0.075、0.085、0.095 MPa,其速度分別為2.67、2.49、2.28 mm/s。從仿真結果可知:氣壓下足部變形隨著管徑不同適應變化,載荷作業步態下,可提供足夠的接觸力,可在54~59 mm的管道中穩定前行。
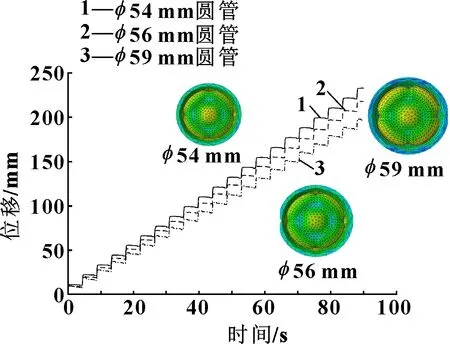
圖11 不同內徑管道下機器人負載前行
3.3 障礙清除作業
在實驗環境下,模擬管道內障礙清除作業,其過程見圖12。非作業區域內,機器人采用快速移動步態,快速穿越非工作區(=5.13 mm/s);到達作業區域后,機器人變換為載荷作業步態,提供較大的輸出力,推動10 N障礙物移出至安全區域(=3.70 mm/s)。實驗結果表明:2種步態的配合下,該機器人可高效穩定地完成清障作業。

圖12 障礙清除作業
綜上,所規劃的2種步態具有較強的適應性和靈活性;快速移動步態可應用于快速移動或檢測,載荷作業步態可應用于清障或輸送物料等工作。快速移動步態下機器人最大速度可達5.50 mm/s,載荷作業步態下機器人可垂直推動10 N的障礙。
4 結論
采用自主研發的2種軟體驅動器設計了一種氣動柔性管道機器人,并根據作業任務,規劃了2種運動步態,并進行了實驗驗證。結果表明:機器人2種步態具有一定靈活性與適應性,在不同的工作環境下合理利用不同步態,可提高機器人工作效率。快速移動步態下,機器人運動周期短,移動速度較快,可適應在水平、傾斜45°和垂直管道內爬行,其最大速度可達5.50 mm/s;載荷作業步態下,機器人具有穩定且較強的輸出力,可在圓形管、正方形管、三角形管及變徑管道中負載作業,最大負載能力為10 N;機器人應用載荷作業步態,可提供足夠的接觸力,可在54~59 mm的管道中穩定前行。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
故事大王(2016年7期)2016-09-22 17:30:08
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
兒童故事畫報(2013年3期)2013-06-24 05:40:30
