基于神經(jīng)網(wǎng)絡(luò)逆系數(shù)的冷連軋厚度與張力解耦控制
2022-09-15 09:14:50張瑞成商穎
機(jī)床與液壓 2022年11期
張瑞成,商穎
(華北理工大學(xué)電氣工程學(xué)院,河北唐山 063210)
0 前言
厚度與張力是帶鋼軋制中十分重要的工藝參數(shù)。在帶鋼冷連軋生產(chǎn)過程中,大張力軋制為其最主要特點(diǎn),對軋件的精度與質(zhì)量都有重要影響。當(dāng)前國內(nèi)外對厚度與張力系統(tǒng)的主要研究都以厚度與張力的獨(dú)立控制為主,但是此控制策略沒有考慮厚度與張力的耦合,影響了控制精度。近幾年,一些學(xué)者開始把厚度與張力看作耦合系統(tǒng),將傳統(tǒng)解耦方法和智能解耦方法引進(jìn)厚度與張力耦合系統(tǒng)中。
文獻(xiàn)[4]采用不變性原理對厚度與張力耦合系統(tǒng)解耦,有效降低了厚度與張力的耦合影響;所設(shè)計的H魯棒控制器,很好地解決了建模不精確、參數(shù)攝動與外部擾動問題。雖然不變性原理解耦方法原理簡單,解耦效果很好,但是它對于模型的精確性要求很高。文獻(xiàn)[5-6]應(yīng)用基于神經(jīng)網(wǎng)絡(luò)的PID控制器參數(shù)在線整定的智能解耦方法,雖然較PID解耦縮短了模型到達(dá)穩(wěn)態(tài)的時間,但其模型抗干擾能力有待提高。
因此,本文作者針對傳統(tǒng)解耦方法對模型依賴性強(qiáng)且現(xiàn)有智能解耦方法的模型抗干擾能力和響應(yīng)速度不高的問題,在原有模型的基礎(chǔ)上,將神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)解耦方法應(yīng)用到厚度與張力耦合系統(tǒng)中,以解決以上問題。
1 厚度與張力系統(tǒng)建模與可逆性分析
1.1 系統(tǒng)建模
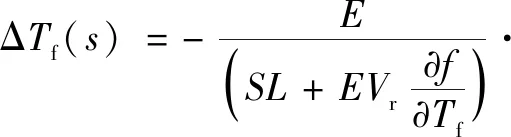
以冷連軋機(jī)中壓下量最大和受干擾最多的第1機(jī)架為研究對象,探究其入口張力和出口厚度的耦合程度。增量形式的厚度方程為

(1)
式中:為1號機(jī)架出口帶鋼厚度;為軋制力;為前張力;為軋機(jī)剛度;為軋件的塑性剛度;為輥縫設(shè)定值;Δ為與厚度相對應(yīng)的擾動,表達(dá)式為

(2)
式中:為后張應(yīng)力。
張應(yīng)力與張力的關(guān)系為
(3)
式中:為帶鋼寬度;為1號機(jī)架入口帶鋼厚度參考值。
由式(3)知:
(4)
由式(4)可得:

(5)
定義為軋制力相對于張應(yīng)力的變化系數(shù):
(6)
將式(3)(5)(6)代入式(1)中,可得:

(7)
對式(7)進(jìn)行拉氏變換可得:


(8)
為1號機(jī)架軋輥位置參考,與的近似關(guān)系如式(9)所示:
(9)
式中:為表征系統(tǒng)階躍響應(yīng)時間的時間常數(shù),文中取0.003 s。
將式(9)代入式(8)中可得輥縫位置與張力兩個控制量對厚度變化的影響:

(10)
模型中軋輥轉(zhuǎn)速與前張力之間的參數(shù)關(guān)系為

(11)
式中:Δ為與張力相對應(yīng)的擾動,表達(dá)式為

(12)
式中:為帶鋼彈性模量;為機(jī)架間距離;為摩擦因數(shù);為帶鋼硬度。
軋機(jī)輥縫和軋輥轉(zhuǎn)速分別由軋機(jī)的壓下系統(tǒng)和速度調(diào)節(jié)系統(tǒng)完成,兩者可以分別用一個二階環(huán)節(jié)來等效,與之對應(yīng)的傳遞函數(shù)分別為()、()。根據(jù)式(1)(2)(11)(12)可得冷軋機(jī)第1機(jī)架的厚度與張力耦合系統(tǒng)結(jié)構(gòu)如圖1所示。
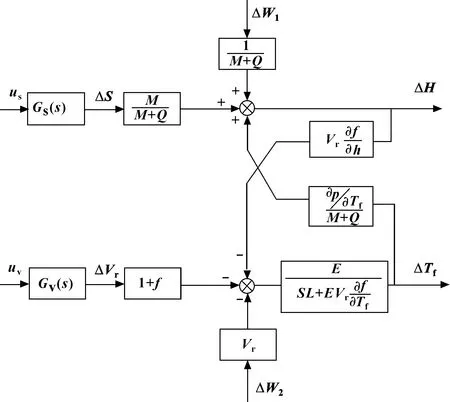
圖1 第1機(jī)架厚度與張力耦合模型
1.2 系統(tǒng)的可逆性證明
對厚度與張力耦合系統(tǒng)應(yīng)用神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)解耦方法,需先證明此系統(tǒng)的可逆性。由以上模型推導(dǎo)可知,此系統(tǒng)是一個二輸入二輸出系統(tǒng),對于多輸入多輸出系統(tǒng)可以采用Interactor算法證明系統(tǒng)的可逆性。對式(10)(11)進(jìn)行拉氏變換,可得厚度、張力的動力學(xué)關(guān)系描述分別為

(13)

(14)


(15)
2 神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)設(shè)計
2.1 神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)解耦原理
根據(jù)上述分析可知厚度與張力耦合系統(tǒng)存在逆系統(tǒng),由神經(jīng)網(wǎng)絡(luò)構(gòu)造的逆系統(tǒng)如圖2所示,主要由靜態(tài)神經(jīng)網(wǎng)絡(luò)與積分器組成。通過與原系統(tǒng)串聯(lián),等效成兩個偽線性子系統(tǒng),以實現(xiàn)系統(tǒng)輸入輸出線性化解耦。
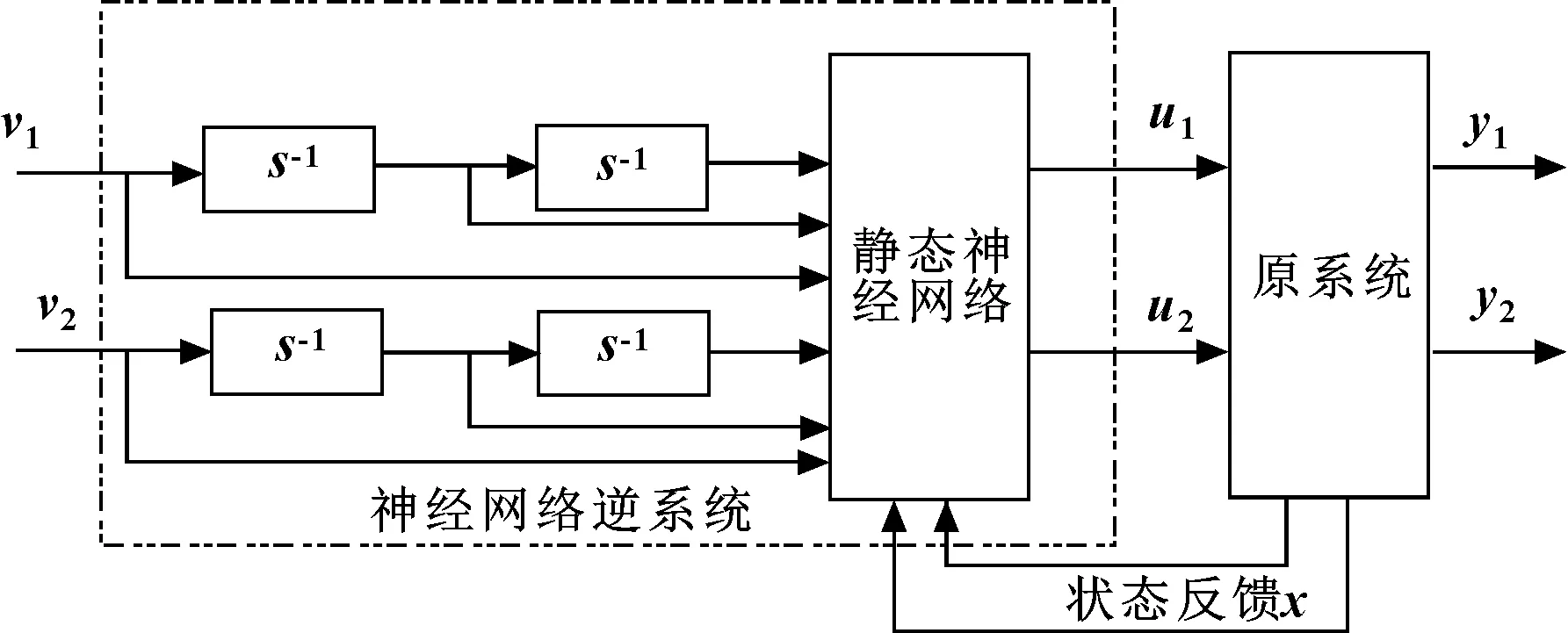
圖2 神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)結(jié)構(gòu)
2.2 神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
由于直接求解厚度與張力耦合系統(tǒng)的逆系統(tǒng)存在一定的不精確性及復(fù)雜性,根據(jù)系統(tǒng)模型求解逆系統(tǒng)有一定不可取性。因神經(jīng)網(wǎng)絡(luò)有很好的非線性逼近能力且具有自適應(yīng)等優(yōu)點(diǎn),所以神經(jīng)網(wǎng)絡(luò)特別適合求解內(nèi)部機(jī)制復(fù)雜問題。BP神經(jīng)網(wǎng)絡(luò)具有高度自學(xué)習(xí)和自適應(yīng)能力,適用于構(gòu)造逆系統(tǒng)。該神經(jīng)網(wǎng)絡(luò)包含一個輸入層、一個隱含層和一個輸出層。將厚度張力耦合系統(tǒng)所得出的第1機(jī)架期望出口厚度及離線計算后的的一次微分和第1機(jī)架期望入口張力及離線計算后的的一次微分作為神經(jīng)網(wǎng)絡(luò)的輸入,軋機(jī)的輥縫和軋輥的轉(zhuǎn)速作為神經(jīng)網(wǎng)絡(luò)的輸出,隱含層節(jié)點(diǎn)數(shù)的選取公式為

(16)
其中:為神經(jīng)網(wǎng)絡(luò)輸入個數(shù);為神經(jīng)網(wǎng)絡(luò)輸出個數(shù);為常數(shù)且≤10。
如圖3所示的BP神經(jīng)網(wǎng)絡(luò)中,=4、=2,由此可得2<<13,在的范圍內(nèi)通過試湊法最后確定隱含層的節(jié)點(diǎn)數(shù)為12。
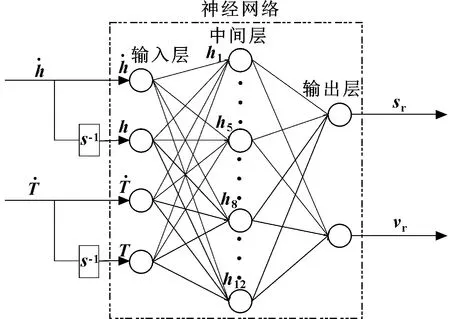
圖3 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
2.3 神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)訓(xùn)練
在厚度與張力系統(tǒng)輸入端輸入采樣頻率為20 Hz、采樣周期為0.1的隨機(jī)輥縫值和輥速值,分別對輸入{,}和輸出{,}進(jìn)行離線采樣,記錄2 000組數(shù)據(jù),離線計算采樣樣本的導(dǎo)數(shù),用前1 500組數(shù)據(jù)訓(xùn)練神經(jīng)網(wǎng)絡(luò)逆系統(tǒng),后500組數(shù)據(jù)測試其學(xué)習(xí)效果。由訓(xùn)練結(jié)果可得網(wǎng)絡(luò)輸出均方根誤差達(dá)到3×10,神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)訓(xùn)練良好。
3 基于粒子群-細(xì)菌覓食混合算法的PID控制器設(shè)計
由于解耦后的偽線性系統(tǒng)處于開環(huán)狀態(tài),極不穩(wěn)定,應(yīng)對解耦后的系統(tǒng)實現(xiàn)閉環(huán)控制,提高系統(tǒng)的穩(wěn)定性。針對粒子群優(yōu)化算法(Particle Swarm Optimization,PSO)“認(rèn)知部分”能力較差、全局最優(yōu)值搜索極易陷入局部最優(yōu)的問題,本文作者提出一種粒子群-細(xì)菌覓食混合算法。把細(xì)菌覓食算法(Bacterial Foraging Optimization,BFO)里的趨向操作引入粒子群優(yōu)化算法中,先由PSO算法對區(qū)域進(jìn)行全局搜索,記憶個體和群體信息,而局部搜索則由BFO算法進(jìn)行趨向和聚集等步驟完成。
3.1 混合算法詳述
PSO初始化一群隨機(jī)粒子,所有粒子都有一個被目標(biāo)函數(shù)所確定的適應(yīng)值、位置和飛行速度,它的位置和飛行速度隨自身搜索到的最優(yōu)解和群體搜索到的最優(yōu)解動態(tài)變化。

(17)

(18)

細(xì)菌覓食優(yōu)化算法是一種仿生隨機(jī)搜索優(yōu)化算法,具有對初值和參數(shù)選擇不敏感、魯棒性強(qiáng)等優(yōu)點(diǎn)。
趨向操作指細(xì)菌向富營養(yǎng)區(qū)域移動的行為。大腸桿菌通過翻轉(zhuǎn)和游動,趨于營養(yǎng)濃度高的地方覓食。細(xì)菌的每一步趨向操作可表示為

(19)
式中:(,,)為細(xì)菌在經(jīng)過第次趨向動作、第次繁殖操作以及第次遷徙操作后的位置;()為趨向的方向向量;()為固定步長。對()引入指數(shù)函數(shù),以提高搜索過程中的準(zhǔn)確性和快速性,改進(jìn)后的步長為
′()=()·e(-iter,)/
(20)
式中:為算法最大迭代算數(shù);iter,為細(xì)菌目前迭代次數(shù)。



(21)

(22)
3.2 混合算法流程
混合算法具體步驟為
(1)初始化參數(shù)、、、、、、、,為細(xì)菌總個數(shù);為搜索空間維度;為趨向操作數(shù);為細(xì)菌總數(shù)的一半;、、、為PSO隨機(jī)參數(shù);
(2)利用PSO算法進(jìn)行全局尋優(yōu),記憶個體和群體信息,尋找當(dāng)前的和并初始化;
(3)細(xì)菌翻轉(zhuǎn)尋找局部最優(yōu)解,根據(jù)混合算法的位置和速度更新公式更新細(xì)菌動態(tài),評估粒子的適應(yīng)度函數(shù);
(4)如果適應(yīng)度大于上一次的值則輸出結(jié)果,如果小于上一次的值則轉(zhuǎn)向步驟(3)繼續(xù)運(yùn)行;
(5)趨向操作循環(huán);
(6)聚集操作循環(huán);
(7)遷移操作循環(huán);
(8)判斷是否達(dá)到最大迭代次數(shù),如果是,則結(jié)束算法運(yùn)行,否則返回步驟(4)。
為增強(qiáng)控制效果,本文作者在PID控制器參數(shù)優(yōu)化中,運(yùn)用PSO-BFO混合算法對PID的、、3個參數(shù)進(jìn)行調(diào)整。其控制結(jié)構(gòu)如圖4所示。
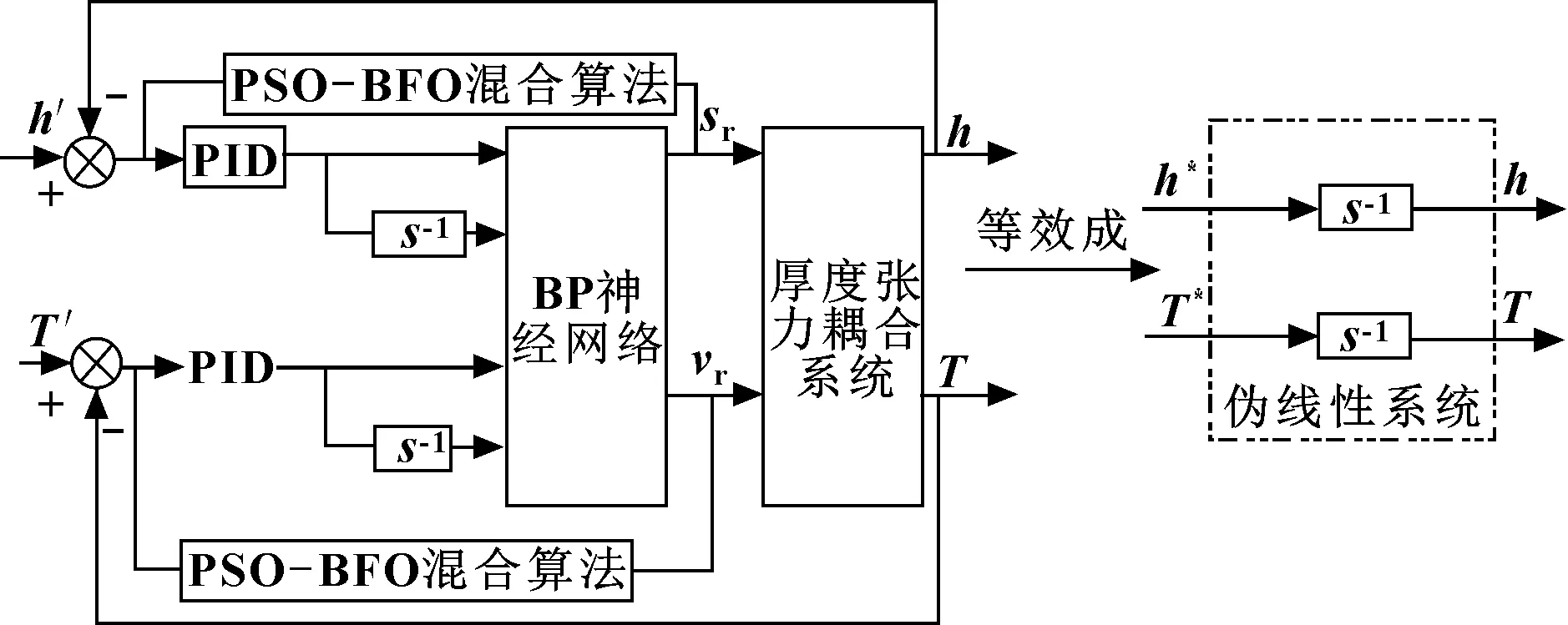
圖4 厚度與張力神經(jīng)網(wǎng)絡(luò)逆解耦控制系統(tǒng)框圖
4 控制系統(tǒng)的仿真
以文獻(xiàn)[9]中某鋼廠5機(jī)架冷連軋機(jī)第1機(jī)架為例,其主要參數(shù)為

厚度與張力仿真系統(tǒng)采用的傳遞函數(shù)為

()=

()=

()=

4.1 神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)解耦效果
每次以給定一個輸入且另一個輸入為0的方式,判斷兩個輸出間的耦合響應(yīng),結(jié)果如圖5所示。由圖5(a)可知:解耦前雖然厚度的設(shè)定值為2.55 mm,但響應(yīng)為2.50 mm,存在誤差,厚度變化量引起的張力20 MPa,解耦后厚度響應(yīng)達(dá)到2.55 mm,厚度變化量引起的1號機(jī)架入口張力變化1.8 MPa。由圖5(b)可知:解耦前102 MPa的張力變化量可使1號機(jī)架出口厚度變化0.03 mm,解耦后102 MPa張力變化量引起的厚度變化為1.5×10mm。可見神經(jīng)網(wǎng)絡(luò)逆解耦很大程度上減弱了厚度與張力系統(tǒng)的耦合,大大減弱了厚度與張力的相互影響。
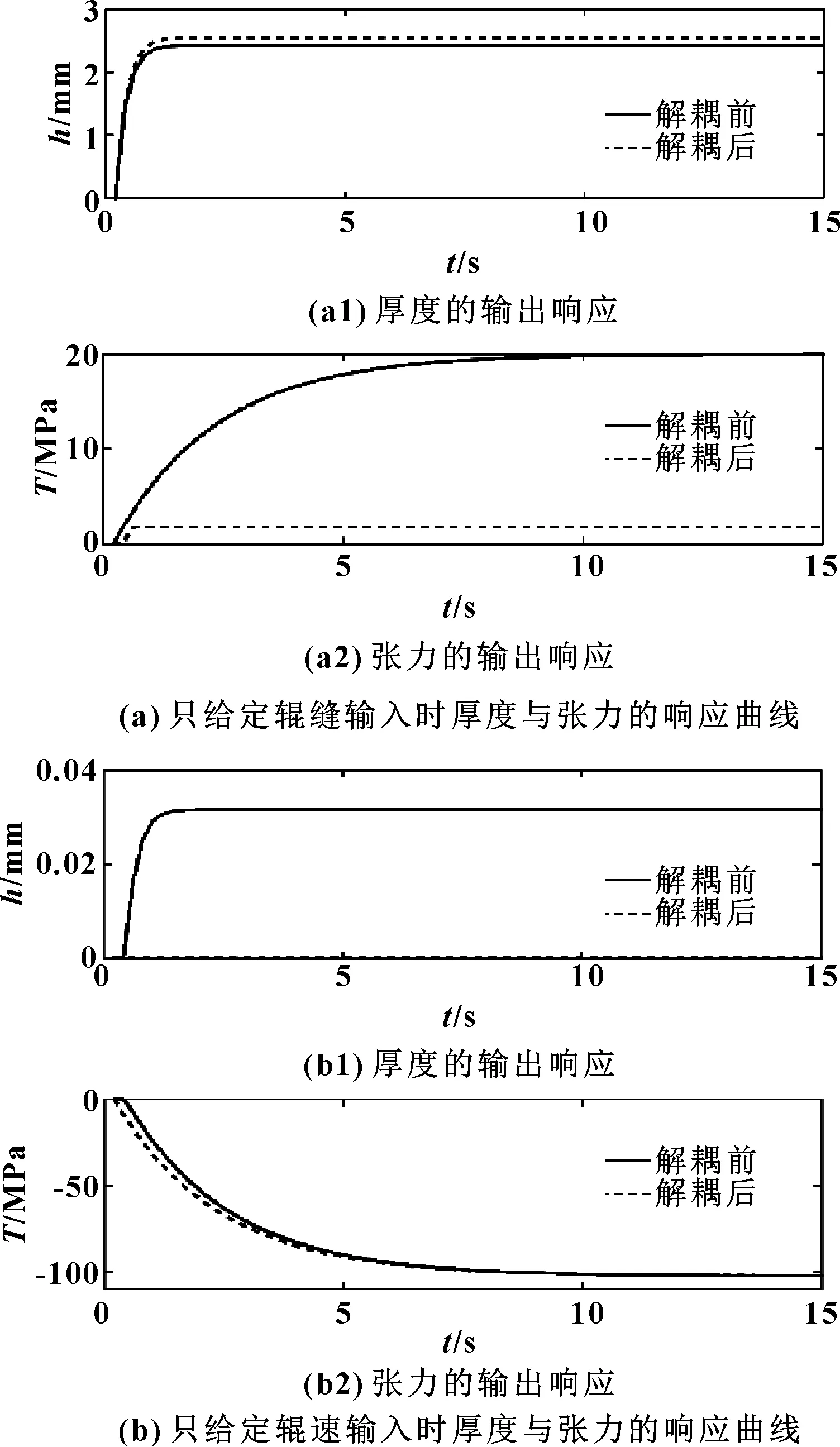
圖5 厚度與張力解耦前后耦合程度曲線
4.2 解耦方法對比及結(jié)果分析
將基于準(zhǔn)對角遞歸神經(jīng)網(wǎng)絡(luò)(Quasi-Diagonal Recurrent Neural Network,QDRNN)的多變量PID解耦控制和基于BP神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)的PSO-BFO混合算法優(yōu)化PID解耦控制分別應(yīng)用到厚度與張力耦合系統(tǒng)中,并在30~40 s加入幅值為0.5、頻率為1.256 rad/s的正弦干擾信號,解耦后的響應(yīng)曲線如圖6所示。可以看出:基于BP神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)的PSO-BFO混合算法優(yōu)化PID解耦控制比基于QDRNN的多變量PID解耦更快達(dá)到設(shè)定值,且對于施加的相同的正弦擾動信號,基于BP神經(jīng)網(wǎng)絡(luò)逆系統(tǒng)的PSO-BFO混合算法優(yōu)化PID解耦控制,體現(xiàn)了更優(yōu)的抗干擾能力。
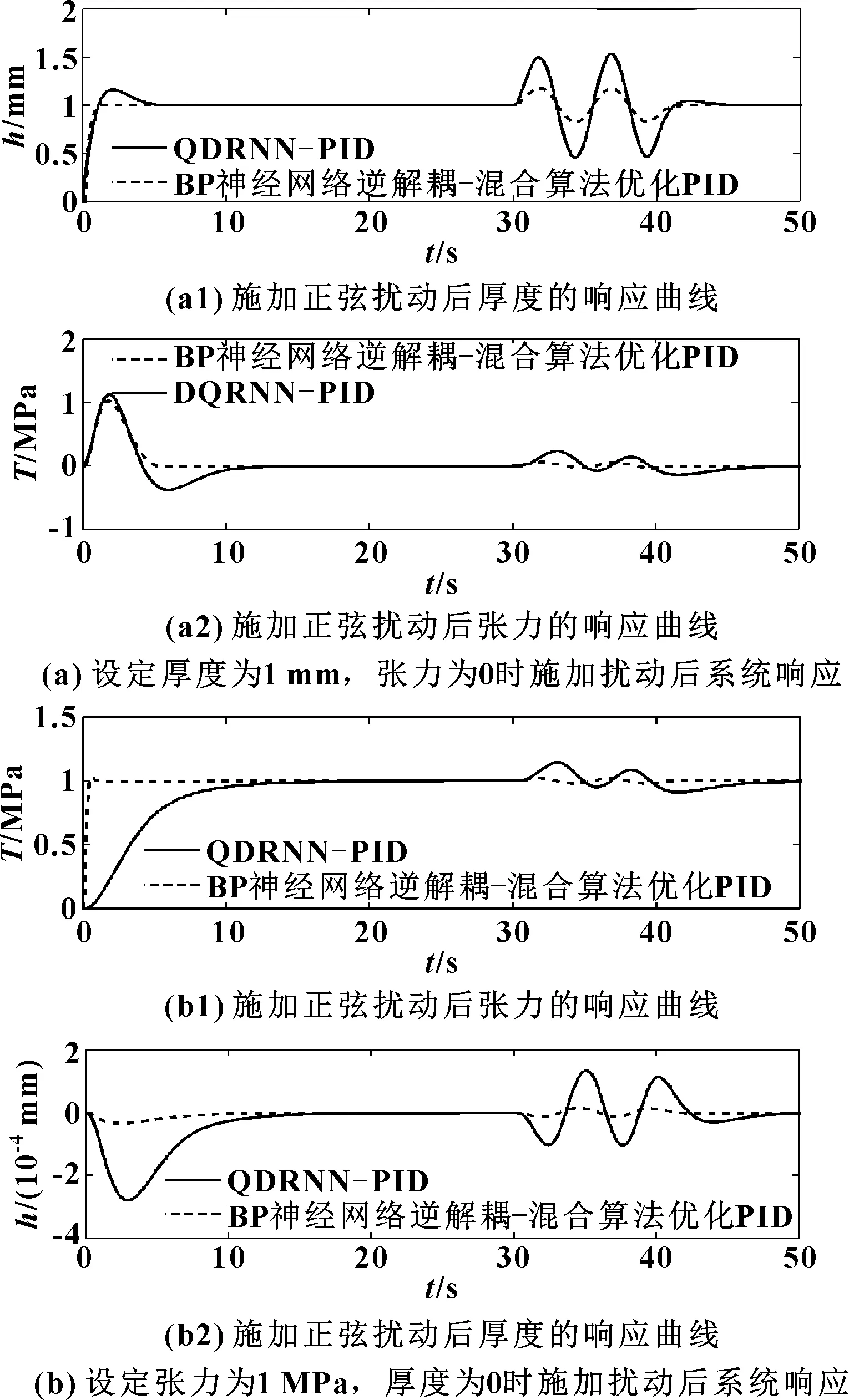
圖6 兩種解耦方法對比下厚度與張力響應(yīng)曲線
5 結(jié)語
針對冷連軋厚度與張力系統(tǒng),考慮軋制力相對張應(yīng)力的變化系數(shù),建立厚度與張力耦合模型。由于直接通過模型求解逆系統(tǒng)存在一定難度且精度不足,可以采用神經(jīng)網(wǎng)絡(luò)的非線性逼近能力構(gòu)造其逆系統(tǒng),然后對解耦后的開環(huán)系統(tǒng)采用PID控制器進(jìn)行閉環(huán)控制。由于傳統(tǒng)的PID控制精度低,本文作者采用一種PSO-BFO混合算法對PID參數(shù)進(jìn)行調(diào)整。通過仿真可知,所提解耦策略無論是解耦效果、模型響應(yīng)速度還是抗干擾能力都明顯優(yōu)于基于QDRNN的多變量PID解耦,具有很好的應(yīng)用前景。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
