基于本體推理和BN的無人駕駛行為決策
2022-09-16 03:24:34常嘉偉李展峰封功源
汽車實用技術 2022年17期
常嘉偉,施 衛,劉 斌,李展峰,封功源
(江蘇理工學院 機械工程學院,江蘇 常州 213000)
無人駕駛系統核心技術包括環境感知、行為決策、運動規劃與控制等方面,其中行為決策系統作為無人駕駛汽車的“大腦”,決定車輛行駛過程的安全性、有效性和合法性。因此,優化提升無人駕駛行為決策系統,使其盡可能地代替駕駛員,做到決策的“擬人化”,一直是研究者需要努力的方向。雖然在高速路段下的自動輔助駕駛系統已較為成熟,并已大量商業化,但作為上層統籌的無人車行為決策系統仍因實時性、安全性等方面的不足,無法應對現實駕駛場景。尤其在城區路段,無人車輛需要面對更為復雜的導航需求和道路狀況,對周圍道路、障礙物、交通標識、紅綠燈及全局導航信息需要有更為全面有效的評估,同時對周圍交通參與者的行為意圖也要有更為及時和精確的判斷。
面對當前無人駕駛行為決策中的難題,狀態機模型是應用最為廣泛的決策模型,即通過建立環境輸入與駕駛動作之間的狀態遷移條件來實現駕駛過程中的決策任務,它運用簡單、易于實現,但無法有效應對復雜工況和帶有不確定性場景。基于知識推理的決策模型對駕駛場景的描述清晰,控制邏輯合理,但隨著場景輸入條件的增多,容易出現規則的組合爆炸。基于深度學習和神經網絡的決策方法透明性差,同時依賴于大規模的數據訓練,訓練時間較長。貝葉斯網絡是基于統計的決策模型,對于不確定場景下的決策推理,有較高的置信度。但是其網絡建模存在維度災難,條件概率分布表(Conditional Probability Table,CPT)需考慮的數量隨著節點數量呈指數級增長。
采用有向無環圖可以顯著降低貝葉斯網絡建模的維度,同時如何設計合理的網絡結構也就成了研究的難點。本體作為一種能在知識層次上描述知識模型的建模工具,可以統一、規范地描述場景知識,但其本身并不具備獨立的推理能力。通過本體理論對駕駛周邊道路場景進行合理的建模,以知識邏輯推理將決策任務合理拆分,選擇對應所需的本體信息構建有向無環圖。通過先驗信息和專家經驗生成CPT文件,即可構建完整的貝葉斯網絡來實現推理功能。最后通過貝葉斯網絡(Bayesian Network, BN)推理得到當前駕駛環境下的最佳行為模式。
1 建立駕駛場景本體知識模型
本體是一種統一的、規范的知識描述方法,通常用來描述領域知識。運用本體知識可以將駕駛場景概念化,分解歸納為合理類集,同時清楚地表達概念類之間的屬性關系。
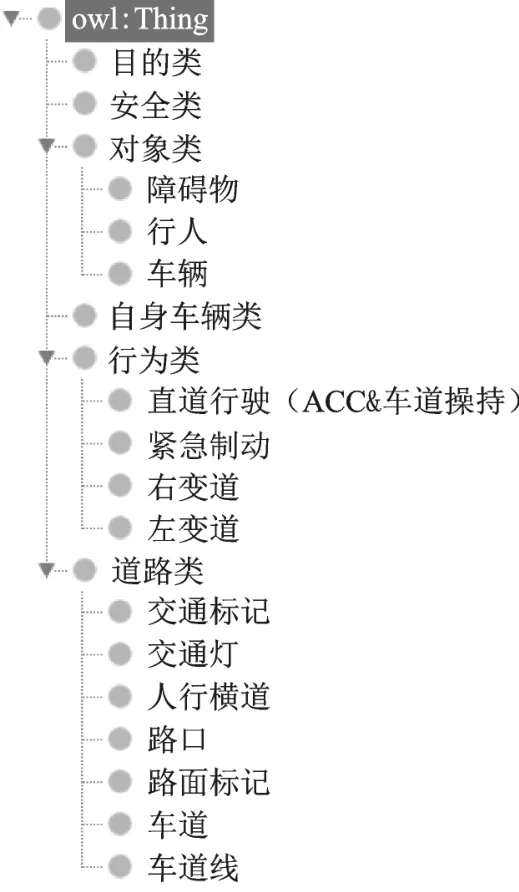
根據無人駕駛場景中需要考慮的環境因素,設定道路類、行為類、對象類、自身車輛類四種基礎概念類別,同時引入安全類和目的類兩類直接作用于行為決策的上層概念類集。
(1)道路類表示與道路相關的信息要素,包括車道數、車道線、路面標記、路段類型等。
(2)行為類表示無人車輛可以執行的駕駛動作,分為橫向行為與縱向行為。為了更為簡化,將單獨的駕駛動作組合為完整的駕駛模式,包括直道行駛:自適應巡航控制(Adaptive Cruise Control, ACC)&車道保持輔助功能(Lane Keeping Assistance, LKA)、左變道、右變道和緊急制動。
(3)對象類表示當前道路上存在對象,包括車輛、行人、障礙物等。
(4)自身車輛類表示自身車輛狀態,主要包括自車與其他車輛或障礙物的相對速度、距離等。
(5)安全類是基于其他基礎類別的上層判定類別,判定結果直接決定行為類的輸出。
(6)目的類表示服務于當前駕駛行程的有效性,為換道行為提供主要參考依據。
駕駛場景分類如圖1所示。
考慮到無人車駕駛行為決策主要服務于最終的輸出模式,即本體中的行為類,因此,其父節點應為行為類中各項的直接影響因素,同時每一節點的設計都應考慮到安全性、合法性、有效性三個角度。
導航信息直接決定本次駕駛任務的有效性,若無法到達目的地,整個駕駛過程將無意義。因此,當前路段的導航信息為確定性要求,即到路口時是否需要左轉或右轉是確定的。但是導航信息無法直接轉換為變道條件,變道行為還需考慮到當前道路是否滿足變道條件,即左右車道線的虛實以及此時本車道與周邊車道的安全性。
安全類作為行為決策的父節點之一,提供當前道路環境的安全性依據。為駕駛過程帶來不確定因素的是其他車輛的駕駛動作,它的影響主要體現在本車跟車和變道的過程中,同時直接決定了當前駕駛的安全性。無人車決策前,應知道當前車道以及左右車道安全與否,因此,設定G,G,G作為行為決策的三個父節點,分別代表左車道、本車道以及右車道的安全性。
換道意圖的產生不僅僅取決于當前駕駛任務的目的性,在保證駕駛方向正確與行駛安全的基礎上,適當的超車行為也是駕駛更順暢的關鍵。為避免持續地跟車行駛導致整個駕駛任務的總時長過大,引入限速達成度(SpeedLimitDisparity)作為換道超車行為的參考依據。當車輛在跟車狀態下與限速上限差值超過20%的時間到達閾值,則視為超出容忍度,可以進行換道超車,因此,限速達成度也作為最終決策的父節點之一。
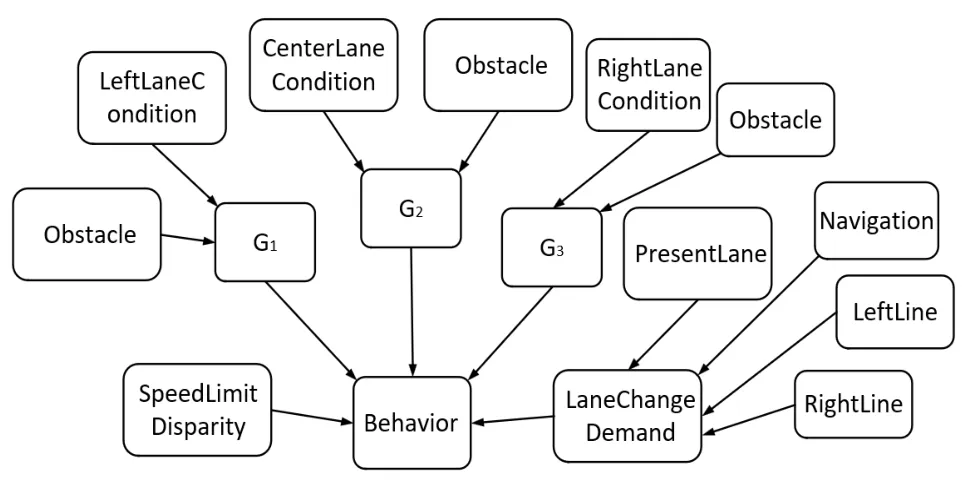
最終無人駕駛行為決策受到三大類別共5個父節點的影響,其本體知識模型如圖2所示。
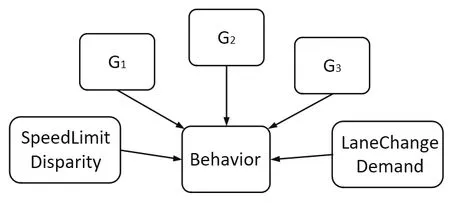
在此基礎上,安全類主要與自身車輛類、對象類相關聯。目標車道是否安全,主要取決于車道上的交通參與對象,即其他車輛、障礙物(Obstacle)、行人以及他們此時的狀態。
基于導航的換道需求(LaneChangeDemand)是由導航信息直接決定的,以車輛為主體,當所在車道與導航(Navigation)信息相匹配,則無換道需求,反之,則需進行換道準備。同時換道行為受到左右車道線的約束,當車道線為實線,則無法進行換道。
因此,可以建立城區交通環境下的無人駕駛行為決策本體模型,如圖3所示。
2 建立貝葉斯網絡


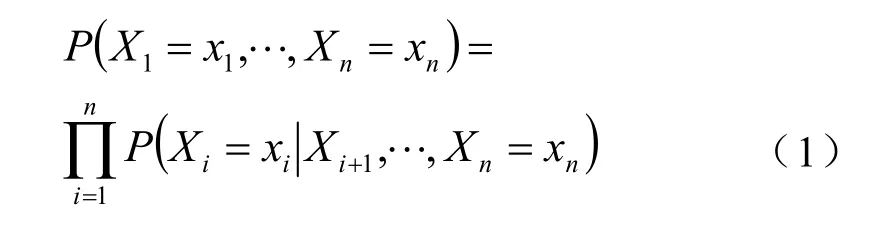
其條件概率公式為

根據貝葉斯定理可得

式中,()為類“先驗”概率;(,)為樣本相對于類標記的條件概率。
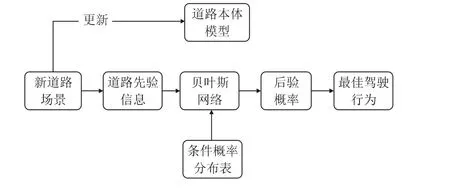
貝葉斯的推理過程是指在網絡結構和CPT已知的情況下,計算某個變量取值的最大概率。本文主要基于的后驗概率問題來決定無人車輛當下應該采取的駕駛動作。后驗概率問題是指在已知一些節點概率的基礎上,再根據新的先驗概率,通過貝葉斯公式修正,得到后驗概率,取對應節點中概率值最大的狀態作為無人車輛的動作輸出。
利用貝葉斯網絡的推理過程如圖4所示。
2.1 確立BN拓撲結構
將上文中的無人駕駛行為決策本體模型中的節點及其父子關系映射為貝葉斯網絡拓撲結構。本體模型中每一類集中的每一對象即可成為貝葉斯網絡中的一個節點,本體理論中的對象屬性則可映射為有向無環圖中的有向邊。相對于本體模型,新構建的貝葉斯網絡只需為各個節點添加合理的狀態變量及其可能的取值。貝葉斯網絡節點變量及其狀態取值如表1所示。C表示與后車碰撞可能較高,即1.7 s<≤3.5 s。
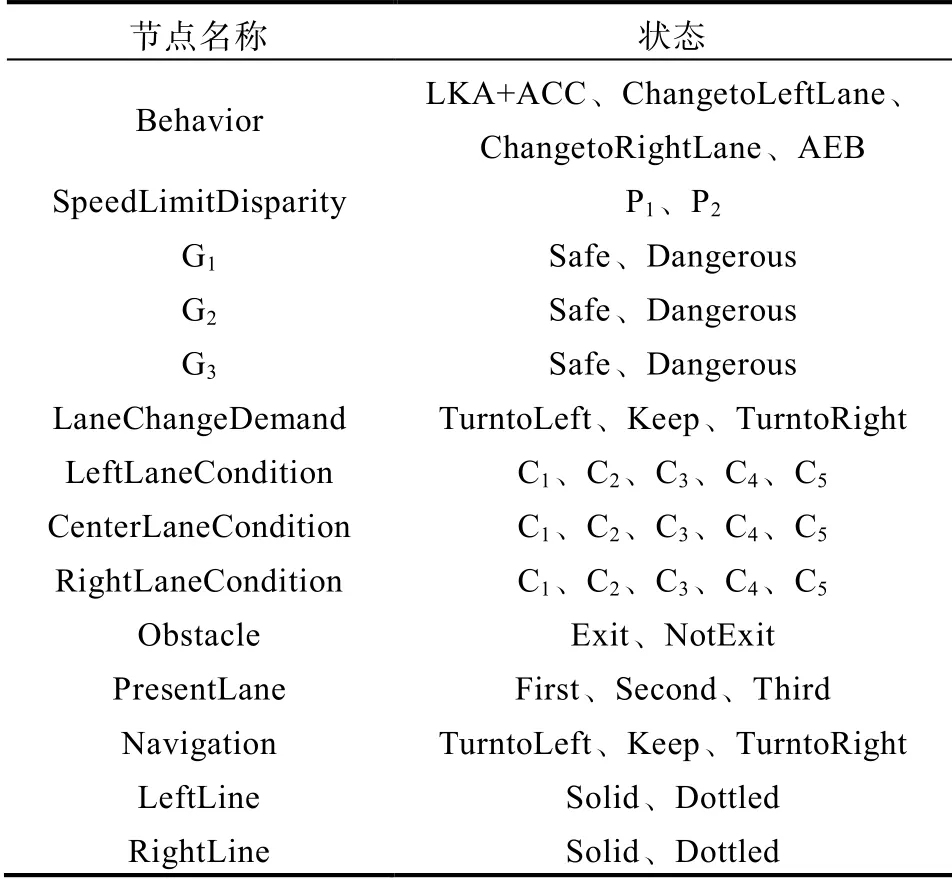
Behavior節點包含四種狀態,作為無人車行為決策的最終輸出,分別對應四種駕駛模式:LKC+ACC的直道駕駛模式、向左換道模式、向右換道模式以及自主剎車模式;G、G、G三個節點分別對應左中右三車道的安全性,有安全和危險兩種狀態,若無左或右車道,則同樣歸類為危險;PresentLane節點表示本車當前所處車道(駕駛場景默認為三車道);LaneChangeDemand表示根據導航(Navigation)以及左右車道線約束給出的換道建議;Left(Center/Right)LaneCondition表示本車與對應道路上其他車輛之間的相互行駛狀態,引入兩車從沖突開始到發生碰撞的時間(Time To Contact, TTC)作為評價車輛狀態安全與否的指標,TTC越小表示兩車越容易發生碰撞。評估公式為

式中,為跟隨車與被跟隨車的相對距離;為跟隨車的速度;為被跟隨車的速度。
節點中狀態含義如下:
C表示即將與前車碰撞,即≤1.7 s;
C表示即將與后車碰撞,即≤1.7 s;
C表示與前車碰撞可能較高,即1.7 s<≤3.5 s;
C表示與前后車不會發生碰撞,即>3.5 s&>3.5 s。
2.2 確定BN條件概率表
構建完整的有向無環圖后,需要根據歷史駕駛案例和專家經驗確定每個節點的條件概率表。
沒有父節點的變量在決策系統中是作為外部環境感知的輸入,只需給節點一個初始概率。G、G、G和LaneChangeDemand節點都有一個以上的父節點,以G和LaneChangeDemand節點為例,G節點的條件概率分布如表2所示。

LaneChangeDemand節點的部分條件概率分布如表3所示。

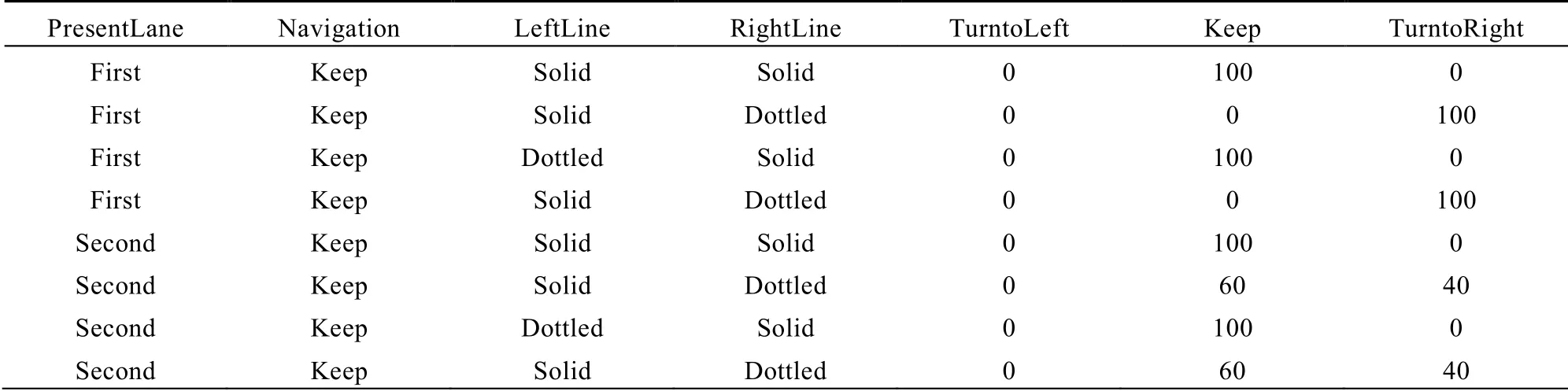
完整的貝葉斯網絡構建完成,即可根據先驗信息推理當前最佳駕駛行為。
3 駕駛場景的搭建與實例驗證分析
Netica是當下最為流行的可視化貝葉斯推理工具,它的優點是可以圖形化,簡易快速地建立貝葉斯網絡。本文通過Netica作為貝葉斯網絡的推理工具,并驗證上文構建網絡的有效性。
本文采用Prescan仿真軟件來預設駕駛場景,預設駕駛場景為城區道路環境下的一個十字路口,如圖4所示。
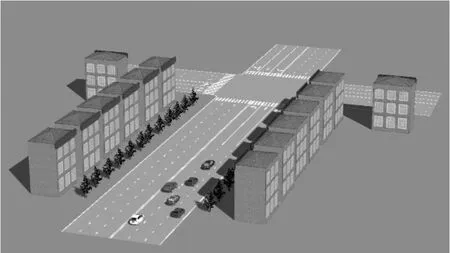
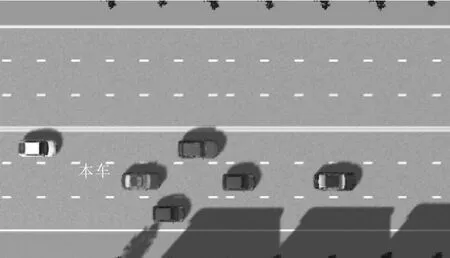
該十字路口為雙向六車道,規定限速為60 km/h,場景(1)如圖5所示。本車(紅色小車)行駛在中間車道,距離路口尚且有一段距離,其左右和前方車道都有車輛在行駛。本車目前行駛速度為50 km/h,中間車道最前方車輛(車輛1)因即將駛入路口,故開始減速,車輛1后方車輛(車輛2)未開始減速,仍保持48 km/h的速度行駛,與本車距離為8 m,左車道兩車均以55 km/h的速度行駛,右車道車輛(車輛3)以54 km/h的速度行駛,車身超出本車車頭3 m。
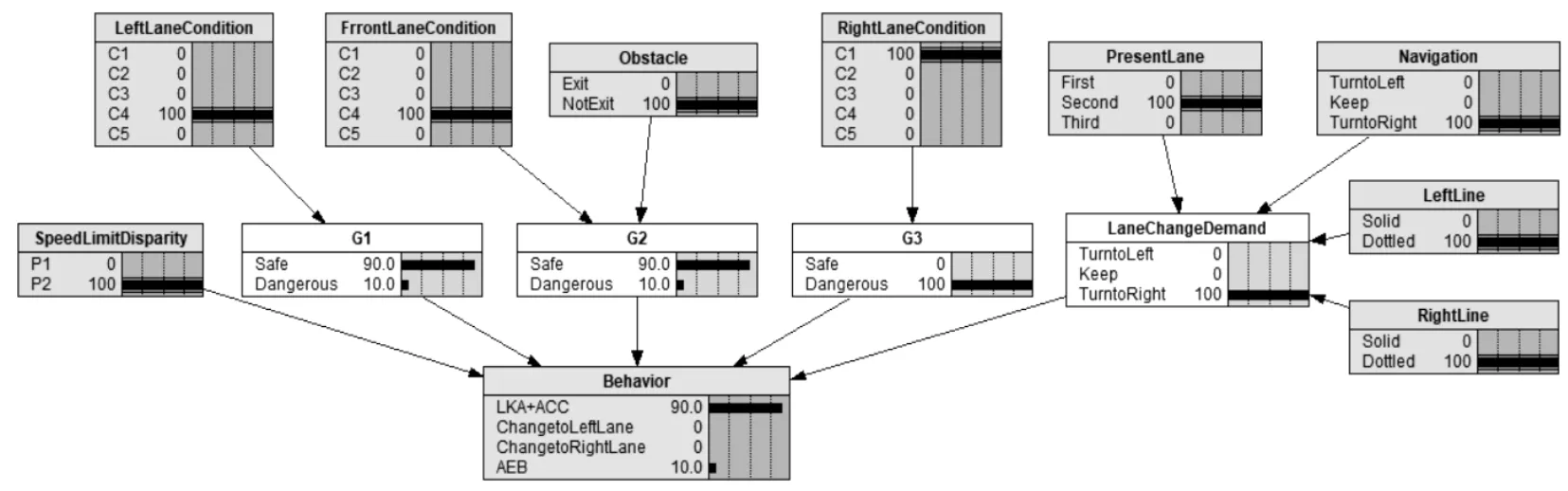
根據導航本車需在該路口右轉,傳感器獲取的當前道路信息作為先驗條件,貝葉斯網絡給出的判斷如圖6所示。由圖6可以看出,保持當前車道行駛的概率為90%,制動的概率為10%。雖然目前有向右換道的需求,但是右方車道不滿足換道條件,因此,車輛仍將保持直道行駛。
駕駛場景(2)如圖7所示。
車輛1減速后,車輛2緊跟著減速,本車在看到前車剎車燈亮起后也開始減速,由此,車輛3與本車的速度差變大,兩車之間的前后距離也隨之增加。貝葉斯網絡給出的判斷如圖7所示。
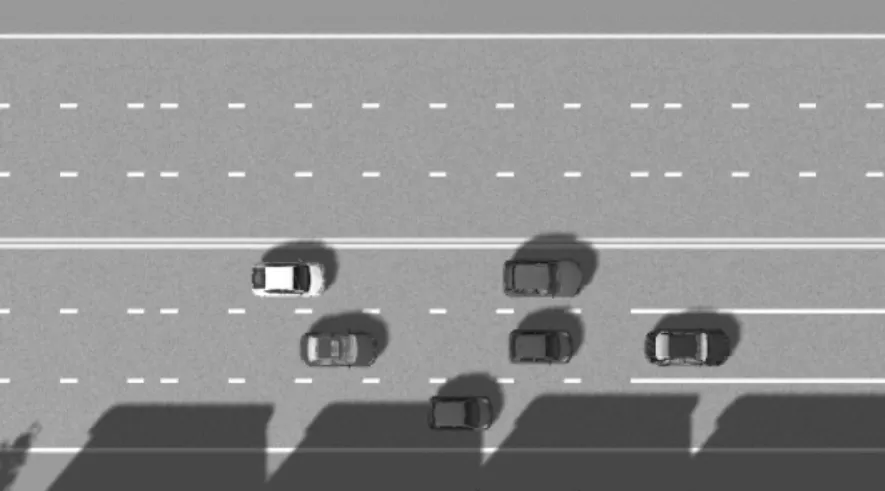
向右換道的概率為90%,直道行駛和制動的概率分別為8%和2%。由于向右換道的需求持續存在,在此時刻,右方車輛與本車已經拉開了距離,右車道具備了換道條件,因此,本車可以順利地做出向右換道的選擇。
駕駛場景(2)的BN如圖8所示。

4 結束語
本文通過本體知識推理建立城區駕駛場景本體模型,再映射為貝葉斯網絡實現模型的推理功能,通過最大后驗概率選擇當前最佳無人駕駛行為,最后在Prescan中設置駕駛場景并通過Netica建立貝葉斯網絡驗證該模型在一般場景中的可行性。該方法能有效地利用當前道路因素,并反應它們之間的相互關系,通過增設安全類與目的類使繁多的類別合并以降低建模的維度,同時使設計能更好地符合安全性、合法性、有效性的初衷。貝葉斯網絡面對城區復雜多變的駕駛場景也有較高魯棒性,通過父節點與子節點的連接可以更直觀地反應道路因素與駕駛行為間的因果關系。在面對城區復雜駕駛環境時,本方法能使車輛較好地判斷當前最優駕駛行為。