基于深度相機(jī)的汽車轉(zhuǎn)向節(jié)位姿估計研究
2022-09-16 07:25:16劉學(xué)超張波鄭魁敬
機(jī)床與液壓 2022年14期
關(guān)鍵詞:深度
劉學(xué)超,張波,鄭魁敬
(1.燕山大學(xué),先進(jìn)鍛壓成形技術(shù)與科學(xué)教育部重點(diǎn)實驗室,河北秦皇島 066004;2.燕山大學(xué),河北省并聯(lián)機(jī)器人與機(jī)電系統(tǒng)實驗室,河北秦皇島 066004)
0 前言
目前消費(fèi)者對產(chǎn)品質(zhì)量要求越來越高,而高級技工數(shù)量有限,因此希望機(jī)器人能代替一部分勞動力。在人工智能推動下,機(jī)器人開始智能化,并逐漸進(jìn)入生產(chǎn)一線代替工人工作,但其應(yīng)用范圍及深度還有待挖掘和拓展。張翰博等利用視覺關(guān)系推理實現(xiàn)了多物體堆疊機(jī)器人抓取。韓冬等人利用解耦控制實現(xiàn)了腱驅(qū)動多指機(jī)械手靈巧抓取。WENG等利用機(jī)器學(xué)習(xí)和彩色攝像頭指導(dǎo)機(jī)器人抓取透明物體。盧道華等利用多個攝像頭采集圖像,通過PnP算法計算集裝箱姿態(tài)。MATEO等實現(xiàn)了剛體六自由度位姿估計。TEJANI等研究了基于霍夫森林的6D位姿估計。XIANG等提出了PoseCNN的位姿估計方法。
針對汽車轉(zhuǎn)向節(jié)自動化加工中的上下料場景,以轉(zhuǎn)向節(jié)內(nèi)孔為基準(zhǔn)點(diǎn),通過視覺引導(dǎo)機(jī)器人實現(xiàn)抓取。利用2D圖像獲取轉(zhuǎn)向節(jié)位置并結(jié)合點(diǎn)云確定轉(zhuǎn)向節(jié)姿態(tài)。轉(zhuǎn)向節(jié)位姿檢測方案分3個部分:相機(jī)標(biāo)定與點(diǎn)云產(chǎn)生、轉(zhuǎn)向節(jié)抓取點(diǎn)檢測和姿態(tài)檢測。
1 RGBD相機(jī)標(biāo)定與點(diǎn)云產(chǎn)生
1.1 RGBD相機(jī)
Intel RealSense D435i相機(jī)如圖1所示,可以輸出彩色圖和深度圖。深度相機(jī)坐標(biāo)系以左側(cè)紅外相機(jī)為基準(zhǔn),深度信息的獲取由左紅外相機(jī)、右紅外相機(jī)和紅外投射器聯(lián)合工作完成。左右紅外相機(jī)捕獲場景并將成像器數(shù)據(jù)發(fā)送到深度成像處理器,通過左右圖像上匹配的關(guān)聯(lián)點(diǎn)來計算圖像中每個像素的深度。

圖1 Intel RealSense D435i相機(jī)
1.2 RGBD相機(jī)標(biāo)定
由于相機(jī)透鏡誤差給圖像帶來了畸變,需對相機(jī)內(nèi)、外參數(shù)進(jìn)行標(biāo)定。采用一個長度為5的向量=[,,,,]描述相機(jī)畸變模型。
所選標(biāo)定板為9×7黑白相間邊長為25 mm的正方形棋盤格標(biāo)定板,如圖2所示。

圖2 棋盤格
RGB相機(jī)內(nèi)參數(shù)如表1所示,使用RGBD相機(jī)對不同位置、不同角度下的標(biāo)定板拍攝15張不同姿態(tài)棋盤格圖片進(jìn)行標(biāo)定,RGBD相機(jī)映射誤差為0.14像素。

表1 Intel RealSense D435i彩色相機(jī)內(nèi)參 單位:像素
彩色相機(jī)畸變系數(shù)為
[-0.051 99,2.092 44,-0.002 004,-0.000 357,-7.778 8]
深度相機(jī)內(nèi)參數(shù)如表2所示,同時使用深度相機(jī)對不同位置、不同角度下的標(biāo)定板拍攝15張不同姿態(tài)棋盤格圖片進(jìn)行標(biāo)定,深度相機(jī)映射誤差為0.12像素。

表2 Intel RealSense D435i深度相機(jī)內(nèi)參 單位:像素
深度相機(jī)畸變系數(shù)為
[-0.028 22,0.309 87,0.002 92,-0.001 14,-0.881 4]
1.3 彩色圖和深度圖對齊
由于Intel RealSense D435i相機(jī)獲取的彩色圖與深度圖之間存在一定偏移,為確保通過圖像擬合確定的轉(zhuǎn)向節(jié)抓取基準(zhǔn)點(diǎn)能映射到準(zhǔn)確的深度信息,需將深度值和彩色圖像素坐標(biāo)匹配,同時通過一一對應(yīng)生成(,,,,,)格式的信息,轉(zhuǎn)化為點(diǎn)云以估計轉(zhuǎn)向節(jié)姿態(tài)。需要求出深度相機(jī)坐標(biāo)系與彩色相機(jī)坐標(biāo)系之間的變換關(guān)系如圖3所示,空間中一點(diǎn)在世界坐標(biāo)系中為(,,),在深度相機(jī)坐標(biāo)系中為(,,),在RGB相機(jī)坐標(biāo)系中為(,,)。

圖3 坐標(biāo)系轉(zhuǎn)換原理
彩色像素坐標(biāo)表示為(,),深度圖像素坐標(biāo)表示為(,),則存在以下關(guān)系:
=
(1)
=
(2)
式中:為彩色相機(jī)內(nèi)參;為深度相機(jī)內(nèi)參。
和通過旋轉(zhuǎn)矩陣和平移向量關(guān)聯(lián):
=+
(3)
點(diǎn)與和之間關(guān)系可以通過RGB相機(jī)和深度相機(jī)的外參矩陣求得:
=+
(4)
=+
(5)
式中:和分別為世界坐標(biāo)系到RGB相機(jī)坐標(biāo)系和深度相機(jī)坐標(biāo)系的旋轉(zhuǎn)矩陣;和分別為世界坐標(biāo)系到RGB相機(jī)坐標(biāo)系和深度相機(jī)坐標(biāo)系的平移向量。
可求出和:

(6)

(7)
RGB相機(jī)和深度相機(jī)之間的旋轉(zhuǎn)矩陣和平移矩陣確定如下:

=[0.014 736 0.000 029 0.000 316]
根據(jù)和進(jìn)行深度圖與彩色圖對齊,并對轉(zhuǎn)換的像素坐標(biāo)系的點(diǎn)按式(8)進(jìn)行過濾,剔除不合理的點(diǎn)。

(8)
彩色圖與深度圖對齊的結(jié)果如圖4(a)所示。根據(jù)對齊后的信息,每一個彩色像素點(diǎn)對應(yīng)的3D坐標(biāo),通過遍歷所設(shè)置的分辨率為1 280像素×720像素圖像的每個像素的(,,,,,)格式的信息,并利用PCL點(diǎn)云庫Point(x y z R G B)格式的數(shù)據(jù)結(jié)構(gòu)生成點(diǎn)云,如圖4(b)所示。

圖4 對齊的結(jié)果與點(diǎn)云
2 轉(zhuǎn)向節(jié)抓取點(diǎn)定位
2.1 圖像預(yù)處理
選取轉(zhuǎn)向節(jié)中心孔上表面圓心為抓取基準(zhǔn)點(diǎn),確定轉(zhuǎn)向節(jié)基準(zhǔn)點(diǎn)在機(jī)器人坐標(biāo)系和相機(jī)坐標(biāo)系下的坐標(biāo)。在彩色圖中把轉(zhuǎn)向節(jié)單獨(dú)區(qū)分出來,并對原圖像中的噪聲和圖像二值化后出現(xiàn)的小雜點(diǎn)進(jìn)行圖像預(yù)處理,如圖5所示。
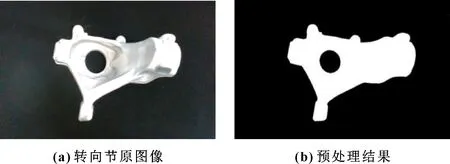
圖5 圖像預(yù)處理對比圖
2.2 轉(zhuǎn)向節(jié)區(qū)域輪廓提取
使用邊緣檢測對轉(zhuǎn)向節(jié)進(jìn)行像素級提取非常關(guān)鍵。在對圖像的邊緣檢測處理后,需要對轉(zhuǎn)向節(jié)內(nèi)孔邊緣信息進(jìn)行搜索及提取,以便擬合基準(zhǔn)點(diǎn)像素坐標(biāo)。邊緣檢測結(jié)果如圖6所示。

圖6 邊緣檢測結(jié)果
邊緣檢測會出現(xiàn)多條輪廓,需要設(shè)定條件將轉(zhuǎn)向節(jié)中心孔的輪廓提取出來。輪廓形狀各異,可以很好地進(jìn)行區(qū)分,且輪廓面積周長有顯著差異,可設(shè)定輪廓周長為390~420像素,面積為10 200~10 800像素,以提取轉(zhuǎn)向節(jié)中心孔輪廓。
提取轉(zhuǎn)向節(jié)中心孔的一組數(shù)據(jù)點(diǎn)如圖7所示,這組數(shù)據(jù)點(diǎn)近似地落在一個圓上,采用最小二乘法來估計這個圓的參數(shù)。

圖7 輪廓提取
設(shè)要擬合的轉(zhuǎn)向節(jié)中心圓孔曲線方程為
=(-)+(-)
(9)
改寫為
=-2++-2+
(10)
令=-2、=-2、=+-,可得圓曲線方程的另一個形式:
++++=0
(11)
提取的中心孔輪廓點(diǎn)集(,)(∈(1,2,3,…,))到圓心的距離為

(12)
點(diǎn)(,)到圓心距離的平方與半徑平方的差為


(13)
要求距離的平方和最小:

(14)
計算使(,,)具有最小值的、、,以確定擬合圓的參數(shù),對(,,)求導(dǎo)可得:

(15)
則:

(16)
式中:

將輪廓操作提取的轉(zhuǎn)向節(jié)中心孔的輪廓點(diǎn)集代入式(16),求得、、、、的值,并求出、、的值,得到通過最小二乘法擬合的轉(zhuǎn)向節(jié)中心圓孔的參數(shù)、和。其中,和為轉(zhuǎn)向節(jié)抓取基準(zhǔn)點(diǎn)的像素坐標(biāo),分別為565、320像素,執(zhí)行結(jié)果如圖8所示。

圖8 擬合圓結(jié)果
2.3 相機(jī)坐標(biāo)系下抓取點(diǎn)坐標(biāo)確定
為獲取轉(zhuǎn)向節(jié)中心孔上表面圓心深度,可以計算轉(zhuǎn)向節(jié)中心孔上表面圓的一組對應(yīng)點(diǎn)深度的平均值作為深度坐標(biāo)。根據(jù)確定出來的圓心,設(shè)置過圓心與水平線成0°、±45°、90°的8組方向。根據(jù)擬合求得的半徑,設(shè)置搜索區(qū)域[-3,+7]進(jìn)行坐標(biāo)搜索,搜索區(qū)域如圖9紅線部分所示。

圖9 設(shè)置搜索半徑
根據(jù)對齊后的深度圖,獲取搜索區(qū)域深度,按照由內(nèi)向外的順序組成列表。依照順序計算相鄰兩值的差值,并定位最大差值的位置。利用該位置之后的值計算的平均值代替該搜索方向確定的深度。以同樣方法獲取8組搜索區(qū)域的深度。由于轉(zhuǎn)向節(jié)內(nèi)孔部分有小凹槽,還需去除對應(yīng)方向上深度值相差超過5 mm的搜索方向,將剩余搜索方向的平均值作為抓取基準(zhǔn)點(diǎn)的深度。根據(jù)內(nèi)參矩陣、轉(zhuǎn)向節(jié)抓取基準(zhǔn)點(diǎn)像素坐標(biāo)及深度值得到基準(zhǔn)點(diǎn)在彩色相機(jī)坐標(biāo)系下的三維坐標(biāo),結(jié)果如圖10所示。

圖10 轉(zhuǎn)向節(jié)抓取基準(zhǔn)點(diǎn)定位坐標(biāo)
3 轉(zhuǎn)向節(jié)姿態(tài)估計
3.1 點(diǎn)云預(yù)處理
由于轉(zhuǎn)向節(jié)會傾斜,不能保持同一姿態(tài),需要確定轉(zhuǎn)向節(jié)姿態(tài)從而實現(xiàn)機(jī)器人精準(zhǔn)抓取。轉(zhuǎn)向節(jié)材質(zhì)為鋁,表面存在一定的反光、光線干擾等導(dǎo)致獲取點(diǎn)云時出現(xiàn)噪聲和離群點(diǎn)。如果不去除離群點(diǎn),會影響轉(zhuǎn)向節(jié)特征描述子計算,導(dǎo)致點(diǎn)云配準(zhǔn)出現(xiàn)誤差,影響轉(zhuǎn)向節(jié)姿態(tài)估計精度。在對點(diǎn)云處理之前,需對轉(zhuǎn)向節(jié)部分?jǐn)?shù)據(jù)去除離群點(diǎn)。如果直接把整個原始點(diǎn)云進(jìn)行配準(zhǔn)計算會帶來很大干擾,需從原始點(diǎn)云中將轉(zhuǎn)向節(jié)部分單獨(dú)分離出來。算法流程如圖11所示,處理結(jié)果如圖12所示。

圖11 點(diǎn)云預(yù)處理算法流程

圖12 點(diǎn)云預(yù)處理結(jié)果圖
實際應(yīng)用中,轉(zhuǎn)向節(jié)孔口朝上特征明顯,無須利用完整的轉(zhuǎn)向節(jié)點(diǎn)云,通過局部點(diǎn)云模型法可以構(gòu)建出滿足轉(zhuǎn)向節(jié)姿態(tài)估計的模板點(diǎn)云。點(diǎn)云預(yù)處理獲取轉(zhuǎn)向節(jié)部分點(diǎn)云后采用ICP(Iterative Closest Point)算法進(jìn)行拼接,得到相對完整的轉(zhuǎn)向節(jié)點(diǎn)云模板。點(diǎn)云生成流程如圖13所示,轉(zhuǎn)向節(jié)模板點(diǎn)云如圖14所示。

圖13 模板點(diǎn)云生成流程
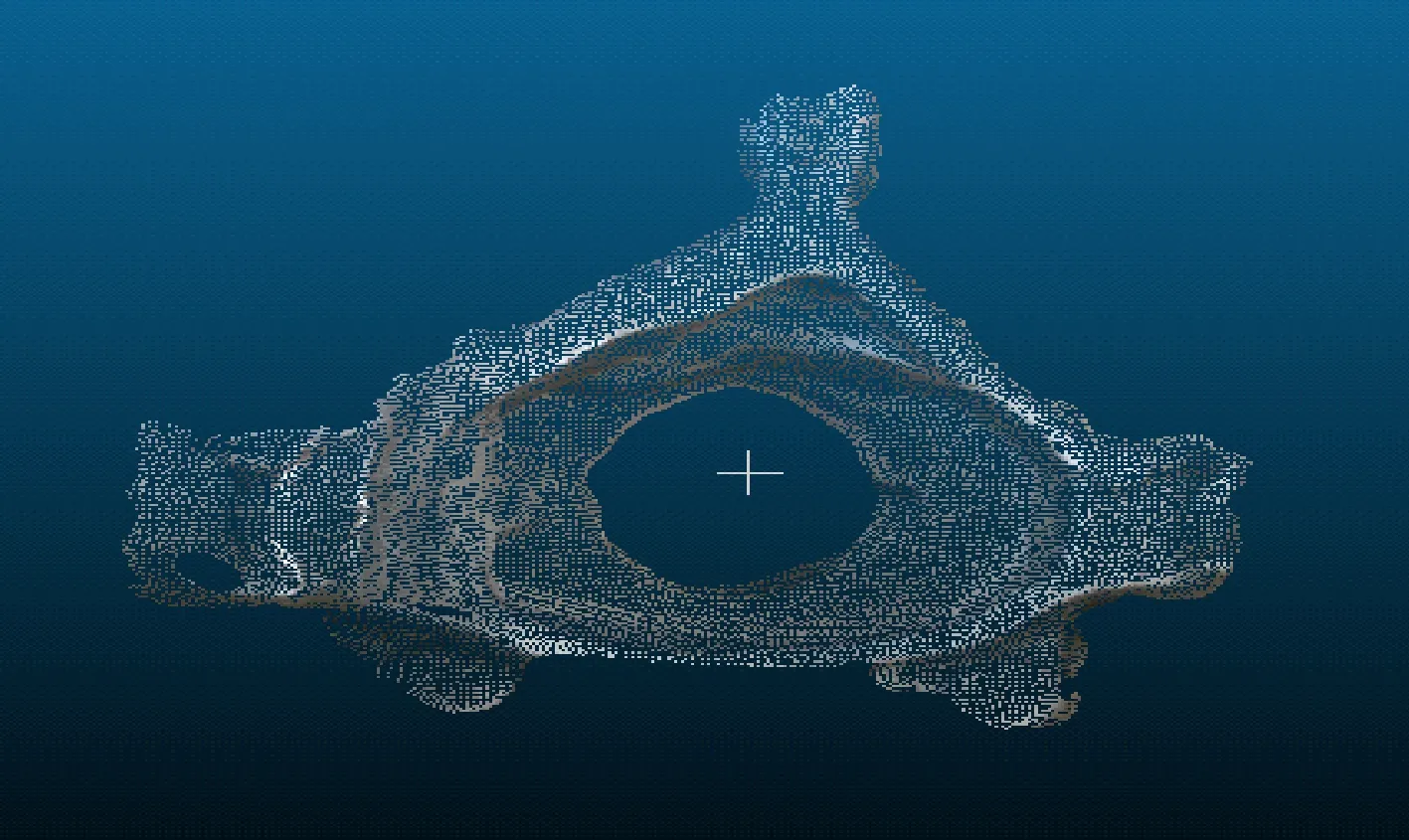
圖14 模板點(diǎn)云
3.2 基于特征描述子的轉(zhuǎn)向節(jié)姿態(tài)初步估計
對轉(zhuǎn)向節(jié)進(jìn)行姿態(tài)估計是通過模板轉(zhuǎn)向節(jié)點(diǎn)云與通過點(diǎn)云預(yù)處理得到的待估計轉(zhuǎn)向節(jié)點(diǎn)云的配準(zhǔn)實現(xiàn)的。區(qū)分轉(zhuǎn)向節(jié)曲面空間的分布情況和尋找相對應(yīng)的點(diǎn),引入局部特征描述子,通過計算鄰域內(nèi)相應(yīng)特征,使特征描述子能夠描述轉(zhuǎn)向節(jié)表面,通過表面的幾何特征尋找對應(yīng)點(diǎn),找到對應(yīng)點(diǎn)之后再基于ICP算法計算轉(zhuǎn)換矩陣。采樣一致性初始配準(zhǔn)算法(SAC-IA)可以通過幾種不同的特征描述子來尋找對應(yīng)點(diǎn)進(jìn)行初始配準(zhǔn),因此用來作為轉(zhuǎn)向節(jié)姿態(tài)初始估計,其算法流程如圖15所示。

圖15 SAC-IA算法流程
提取模板轉(zhuǎn)向節(jié)點(diǎn)云特征點(diǎn)和FPFH(Fast Point Feature Histograms)特征描述子建立特征集合=[,,,],其中,(,,)表示SIFT3D特征點(diǎn)坐標(biāo)、表示FPFH局部特征。以同樣方式建立待檢測轉(zhuǎn)向節(jié)點(diǎn)云的特征集合=[,,,],用SAC-IA算法對模板轉(zhuǎn)向節(jié)和待檢測轉(zhuǎn)向節(jié)進(jìn)行配準(zhǔn),獲取初始位姿信息。
配準(zhǔn)過程中,通過Huber函數(shù)計算轉(zhuǎn)向節(jié)匹配點(diǎn)變換后的距離誤差和,判斷待檢測轉(zhuǎn)向節(jié)點(diǎn)云與模板轉(zhuǎn)向節(jié)點(diǎn)云間配準(zhǔn)變換的精度。Huber函數(shù)對噪聲有好的魯棒性,表示為

(17)
式中:為Huber的參數(shù),需要預(yù)先設(shè)定;為第組匹配區(qū)域的距離誤差。
利用式(17)對誤差進(jìn)行評價,在所有的匹配中尋找一組最優(yōu)匹配,使兩轉(zhuǎn)向節(jié)間距離誤差和最小。獲得的轉(zhuǎn)換矩陣作為粗配準(zhǔn)的結(jié)果,不同姿態(tài)下FPFH配準(zhǔn)結(jié)果如圖16所示。

圖16 FPFH配準(zhǔn)結(jié)果
3.3 基于NDT的轉(zhuǎn)向節(jié)姿態(tài)精準(zhǔn)估計
利用粗配準(zhǔn)算法估計的轉(zhuǎn)向節(jié)姿態(tài)結(jié)果達(dá)不到精度要求,還需要細(xì)配準(zhǔn)來提高轉(zhuǎn)向節(jié)姿態(tài)估計精度。利用NDT(Normal Distributions Transform)算法對待檢測轉(zhuǎn)向節(jié)與模板轉(zhuǎn)向節(jié)進(jìn)行細(xì)配準(zhǔn),流程如圖17所示。

圖17 NDT算法流程
統(tǒng)計模板轉(zhuǎn)向節(jié)與待檢測轉(zhuǎn)向節(jié)的點(diǎn)云分布信息,利用轉(zhuǎn)換矩陣將待檢測轉(zhuǎn)向節(jié)的點(diǎn)云轉(zhuǎn)換到模板轉(zhuǎn)向節(jié)坐標(biāo)系中,如果其點(diǎn)云數(shù)據(jù)點(diǎn)在模板轉(zhuǎn)向節(jié)點(diǎn)云中的概率密度很大,則該矩陣參數(shù)較好。細(xì)配準(zhǔn)結(jié)果如圖18所示。

圖18 多姿態(tài)NDT配準(zhǔn)結(jié)果
4 軟件開發(fā)與測試
為驗證轉(zhuǎn)向節(jié)基準(zhǔn)點(diǎn)定位和轉(zhuǎn)向節(jié)姿態(tài)估計算法,在VS平臺上利用C++多線程技術(shù)實現(xiàn)多窗口同步顯示,數(shù)據(jù)流程如圖19所示。

圖19 姿態(tài)估計數(shù)據(jù)流程
圖20所示為直觀顯示轉(zhuǎn)向節(jié)位姿信息的系統(tǒng)界面。該系統(tǒng)采用MFC設(shè)計,調(diào)用OpenCV圖像處理庫和PCL點(diǎn)云庫等對圖像及點(diǎn)云進(jìn)行處理。

圖20 系統(tǒng)界面
根據(jù)深度誤差與深度的關(guān)系,設(shè)定相機(jī)距離采集平面為800 mm,采集轉(zhuǎn)向節(jié)不同姿態(tài)下的點(diǎn)云圖像,估計不同姿態(tài)下的姿態(tài)。圖21所示為采用SAC-IA算法得到的結(jié)果,可以看出粗配準(zhǔn)的結(jié)果還有一定的誤差,不能用于最終的姿態(tài)估計結(jié)果。圖22所示為NDT算法的結(jié)果,NDT算法的初始轉(zhuǎn)換矩陣設(shè)置為SAC-IA算法得到的轉(zhuǎn)換矩陣,可以看出:配準(zhǔn)后獲得了更精確的姿態(tài)估計結(jié)果;轉(zhuǎn)向節(jié)在不同位置及姿態(tài)下,都能準(zhǔn)確識別姿態(tài)信息。

圖21 粗配準(zhǔn)結(jié)果

圖22 細(xì)配準(zhǔn)結(jié)果
不同姿態(tài)下,姿態(tài)1、姿態(tài)2粗配準(zhǔn)分別對應(yīng)的旋轉(zhuǎn)矩陣如、所示:

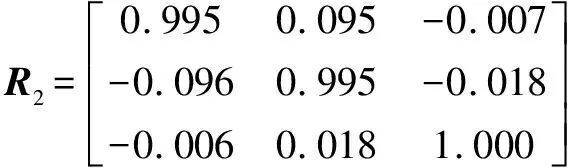
不同姿態(tài)下,姿態(tài)1、姿態(tài)2細(xì)配準(zhǔn)分別對應(yīng)的旋轉(zhuǎn)矩陣如下、所示:


為配準(zhǔn)實現(xiàn)數(shù)值化,計算30次轉(zhuǎn)向節(jié)間點(diǎn)云匹配中g(shù)etFitnessScore()函數(shù)的平均值,該值是所有對應(yīng)點(diǎn)間的距離平方和,值越小配準(zhǔn)效果越好。設(shè)置了對照組測試,選取模板轉(zhuǎn)向節(jié)的點(diǎn)云進(jìn)行配準(zhǔn)來作為對照組,粗、細(xì)配準(zhǔn)結(jié)果分別如圖23、圖24所示。最終getFitnessScore得分如表3所示。

圖23 對照組粗配準(zhǔn)結(jié)果

圖24 對照組細(xì)配準(zhǔn)結(jié)果

表3 對照點(diǎn)云與粗細(xì)配準(zhǔn)得分 單位:mm2
單純地基于特征描述子的姿態(tài)估計難以獲得良好結(jié)果,從對照組的結(jié)果看,同一轉(zhuǎn)向節(jié)獲得的分?jǐn)?shù)更低,配準(zhǔn)效果更好,不同轉(zhuǎn)向節(jié)間有微小差別,對配準(zhǔn)有一定影響。NDT算法在粗配準(zhǔn)基礎(chǔ)上進(jìn)行細(xì)配準(zhǔn),取得了更好效果,getFitnessScore(最近對應(yīng)點(diǎn)距離平方和)得分為27 mm,表明轉(zhuǎn)向節(jié)姿態(tài)估計算法有效。
5 結(jié)論
對轉(zhuǎn)向節(jié)進(jìn)行基準(zhǔn)點(diǎn)定位,通過輪廓檢測過濾及輪廓擬合確定抓取點(diǎn)的像素坐標(biāo),設(shè)置搜索區(qū)域中的突變值取平均值獲取深度,利用相機(jī)參數(shù)獲取相機(jī)坐標(biāo)系下的三維坐標(biāo)。通過去除背景將轉(zhuǎn)向節(jié)從原始點(diǎn)云中分離出來,利用濾波算法去除噪聲及離群點(diǎn)。提取轉(zhuǎn)向節(jié)特征點(diǎn)及特征描述子,用SAC-IA算法粗配準(zhǔn),用NDT算法細(xì)配準(zhǔn),getFitnessScore得分為27 mm,實現(xiàn)了轉(zhuǎn)向節(jié)姿態(tài)的精確估計。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:50
快樂學(xué)習(xí)報·教育周刊(2022年16期)2022-05-01 21:25:05
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
藝術(shù)品鑒證.中國藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國藝術(shù)金融(2018年6期)2019-01-08 02:43:04
藝術(shù)品鑒證.中國藝術(shù)金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設(shè)與管理(2015年15期)2015-03-20 15:18:57
