面結(jié)構(gòu)光測量曲面特征的不確定度評(píng)估
2022-09-17 04:41:08程銀寶趙一帆羅哉王中宇王學(xué)影
光學(xué)精密工程 2022年17期
程銀寶,趙一帆,羅哉*,王中宇,王學(xué)影
(1.中國計(jì)量大學(xué) 計(jì)量測試工程學(xué)院,浙江 杭州 310018;2.北京航空航天大學(xué) 儀器科學(xué)與光電工程學(xué)院,北京 100191)
1 引言
近年來,自由曲面的高精度測量在汽車、飛機(jī)、模具等制造業(yè)呈現(xiàn)爆炸式增長[1-2]。自由曲面面形是無法用函數(shù)表達(dá)式表示的非對(duì)稱復(fù)雜曲面,基于有限點(diǎn)的傳統(tǒng)測量無法提供足夠的測量信息。三維測量技術(shù)具有非接觸掃描、測量速度快、實(shí)用性強(qiáng)等優(yōu)點(diǎn),在逆向工程、質(zhì)量檢測[3]等領(lǐng)域發(fā)揮著重要作用。其中,結(jié)構(gòu)光式掃描儀因其精度高可以用于復(fù)雜曲面測量[4]。測量不確定度,及不確定度分析和溯源是計(jì)量型儀器測量的基本要求。基于面結(jié)構(gòu)測量曲面的技術(shù)雖然逐漸成熟,但其測量結(jié)果的不確定度評(píng)估仍是難點(diǎn),這也限制了結(jié)構(gòu)光式三維測量技術(shù)在計(jì)量領(lǐng)域的應(yīng)用。因此,對(duì)面向具體任務(wù)的面結(jié)構(gòu)光測量信息進(jìn)行可靠的不確定度評(píng)價(jià)是亟待解決的問題。
不確定分析對(duì)于被測物的質(zhì)量評(píng)價(jià)以及量值溯源均必不可少。Fortmeier等[5]展示了全場測量傾斜波干涉儀對(duì)于非旋轉(zhuǎn)對(duì)稱工件的形狀測量,可以校準(zhǔn)其半徑和球度,可用于非球面和自由曲面的可追溯參考。Ren等[6]基于最小二乘原則建立誤差評(píng)定的數(shù)學(xué)模型,分析了曲面測量中采樣策略和評(píng)估方法引起的不確定性,基于蒙特卡洛模型分析了測量評(píng)定中的相關(guān)不確定度。Kim等[7]利用藍(lán)光掃描儀對(duì)基臺(tái)角度的重復(fù)性和復(fù)現(xiàn)性進(jìn)行了評(píng)定。Susana等[8]將藍(lán)光掃描儀和三坐標(biāo)測量機(jī)(Coordinate Measuring Machine,CMM)的輪廓度測量值進(jìn)行比較,分析不同視場下的測試效果,給出了每種配置下的精度。He等[9]采用單純性法和差分進(jìn)化結(jié)合的算法優(yōu)化輪廓度誤差模型,該方法優(yōu)于最小二乘法。溫秀蘭等[10]針對(duì)自由曲面的特點(diǎn),使用CMM設(shè)定多種曲面測量策略,通過比較輪廓度誤差尋求最優(yōu)采樣策略,考慮了測量策略的影響并進(jìn)行優(yōu)化,但是沒有分析測量策略不同引入的不確定度差異。陳滿意等[11]基于Bootstrap法對(duì)測量點(diǎn)數(shù)均勻分布的曲面實(shí)現(xiàn)了最佳適配不確定度評(píng)定,但此方法計(jì)算量大,需多次測量。王東霞等[12]通過擬粒子群優(yōu)化算法實(shí)現(xiàn)曲面定位,在已知CAD模型下得到了曲面輪廓度誤差,以均方根誤差和峰谷誤差指標(biāo)綜合評(píng)定了自由曲面。程銀寶等[13]結(jié)合經(jīng)典的精度理論,分析了CMM繁雜的不確定度來源,建立普適性的黑箱評(píng)定模型,通過實(shí)例驗(yàn)證了此方法符合國際標(biāo)準(zhǔn)測量不確定度表示指南(Guide to the Expression of Uncertainty in Measurement,GUM)中的基本原理[14]。
綜上所述,學(xué)者們更關(guān)注輪廓度誤差的評(píng)定算法,給出的不確定評(píng)定是不完善的,不僅沒有分析儀器自身的誤差源,而且對(duì)于評(píng)定算法的數(shù)據(jù)處理引入的不確定度分量是忽略不計(jì)的,但是在不確定度評(píng)定中應(yīng)不能遺漏或者重復(fù)計(jì)算各不確定度來源。因此,本文針對(duì)藍(lán)光掃描儀測量輪廓度的不確定度來源進(jìn)行詳細(xì)分析,并給出量化方法。測量系統(tǒng)的輸入量和輸出量存在因果關(guān)系,可以由因得果,也可以由果析因。由于缺少可溯源測量制造曲面的評(píng)定方法,自由曲面在精密加工行業(yè)的應(yīng)用仍有阻礙。本文采用海克斯康Primescan系列藍(lán)光掃描儀采集點(diǎn)云數(shù)據(jù),依據(jù)Polyworks軟件[15]處理并計(jì)算被測工件的曲面輪廓度,采用2種不同的方法分析測量系統(tǒng)的不確定度來源并進(jìn)行不確定度建模。根據(jù)測量原理以及評(píng)定準(zhǔn)則,從誤差溯源方面建立透明箱模型;從量值統(tǒng)計(jì)分析測量結(jié)果的量值特性指標(biāo)建立黑箱模型,分別采用兩個(gè)模型實(shí)現(xiàn)此任務(wù)的不確定度分析。
2 測量原理
2.1 藍(lán)光掃描儀的測量原理
藍(lán)光掃描儀是基于雙目視覺構(gòu)成的光柵投影系統(tǒng)[16]。中間的光柵傳感器發(fā)射多條投影結(jié)構(gòu)光柵至工件表面,光柵經(jīng)物體表面的高度調(diào)制發(fā)生變形,變形后的光柵包含工件的表面信息,經(jīng)相機(jī)編碼匹配兩張照片采集的信息,實(shí)現(xiàn)對(duì)應(yīng)的解碼計(jì)算,經(jīng)三角測量法得到物體的三維數(shù)據(jù)。其測量原理如圖1所示。
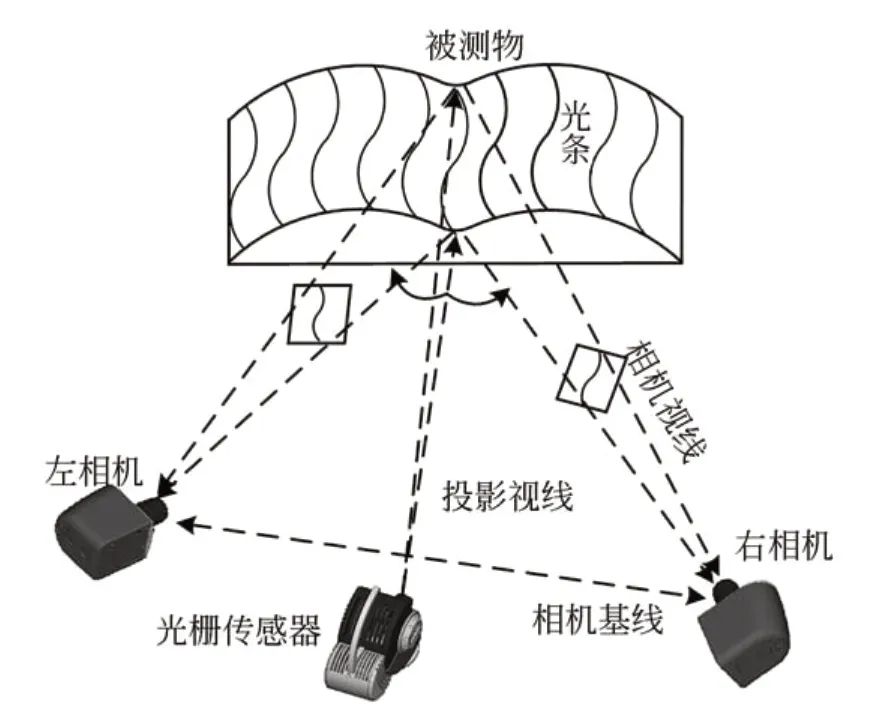
圖1 藍(lán)光掃描儀的測量原理Fig.1 Measurement principle of blue light scanner
2.2 自由曲面形狀特征的評(píng)定準(zhǔn)則
當(dāng)測量曲面不存在加工與檢測誤差時(shí),兩組曲面會(huì)完美的重合。但是由于加工、檢測誤差的存在,測量曲面相對(duì)于理想曲面會(huì)存在一定的偏差和擾動(dòng)。依據(jù)國家標(biāo)準(zhǔn)[17],曲面輪廓度誤差值是被測實(shí)際輪廓相對(duì)于理想輪廓的變動(dòng)情況,是通過坐標(biāo)轉(zhuǎn)換統(tǒng)一坐標(biāo)系得到的。在已知CAD數(shù)模的實(shí)際測量過程中,假設(shè)點(diǎn)云數(shù)據(jù)所在的測量坐標(biāo)系為o1-t1t2t3,CAD數(shù)模所在的設(shè)計(jì)坐標(biāo)系o2-e1e2e3,點(diǎn) 云 數(shù) 據(jù) 中 的 極 大 值 點(diǎn) 為Q(xM,yM,zM),經(jīng)T(R,D)坐標(biāo)旋轉(zhuǎn)平移變換后,統(tǒng)一在設(shè)計(jì)坐標(biāo)系下,可得其極大值點(diǎn)相應(yīng)的定位點(diǎn)為S(xL,yL,zL),與定位點(diǎn)相對(duì)應(yīng)的最近點(diǎn)是P(x#,y#,z#)。其輪廓度誤差是定位點(diǎn)和最近點(diǎn)的偏差的2倍,坐標(biāo)轉(zhuǎn)換過程如圖2所示。
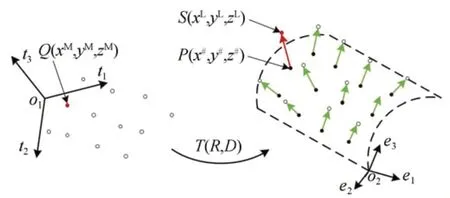
圖2 曲面輪廓度的評(píng)定準(zhǔn)則Fig.2 Evaluation criteria of surface profile
3 基于透明箱模型的不確定度分析與建模
3.1 不確定度分析
基于誤差源分析的透明箱模型是指在充分了解測量原理后,被測參數(shù)與每個(gè)輸入量之間都可以通過函數(shù)表達(dá)式得到,且每一個(gè)輸入量帶來的影響都可以經(jīng)計(jì)算表達(dá)出來,可以通過函數(shù)關(guān)系量化出被測參數(shù)與誤差源的傳遞系數(shù)[18]。
對(duì)于CAD模型已知的自由曲面,計(jì)算輪廓度誤差需要進(jìn)行定位,將測量點(diǎn)從測量坐標(biāo)系轉(zhuǎn)換到設(shè)計(jì)坐標(biāo)系下[19]。假設(shè)實(shí)測點(diǎn)集中的極大值點(diǎn)為Q(xM,yM,zM),與CAD數(shù)模配準(zhǔn)后的定位測量點(diǎn)設(shè)為S(xL,yL,zL),CAD數(shù)模上與極值點(diǎn)相對(duì)應(yīng)的最近點(diǎn)設(shè)為P(x#,y#,z#)。將實(shí)測點(diǎn)集統(tǒng)一在理論點(diǎn)集坐標(biāo)系下,其坐標(biāo)變換可以表述為:

其中:D表示在X,Y,Z軸方向的平移參數(shù);Rx,Ry,Rz表示在X,Y,Z軸方向的旋轉(zhuǎn)參數(shù)。
假設(shè)θx,θy,θz分 別表示實(shí)測點(diǎn)集 繞 坐 標(biāo) 軸旋轉(zhuǎn)的角度,Δx,Δy,Δz分別表示實(shí)測點(diǎn)集繞坐標(biāo)軸平移的分量。根據(jù)坐標(biāo)轉(zhuǎn)換,式(1)可轉(zhuǎn)換為:
其中:sx表示sinθx,同理可得sy,sγ的含義;cx表示的是cosθx,同理可得cy,cγ的含義。
通 過 式(2)可 以 得 到Q(xM,yM,zM)到S(xL,yL,zL)的轉(zhuǎn)換公式為:

根據(jù)定義,曲面輪廓度的函數(shù)表達(dá)式為:

將式(3)代入式(4)中,其函數(shù)表達(dá)式可轉(zhuǎn)換為:

3.2 不確定度建模
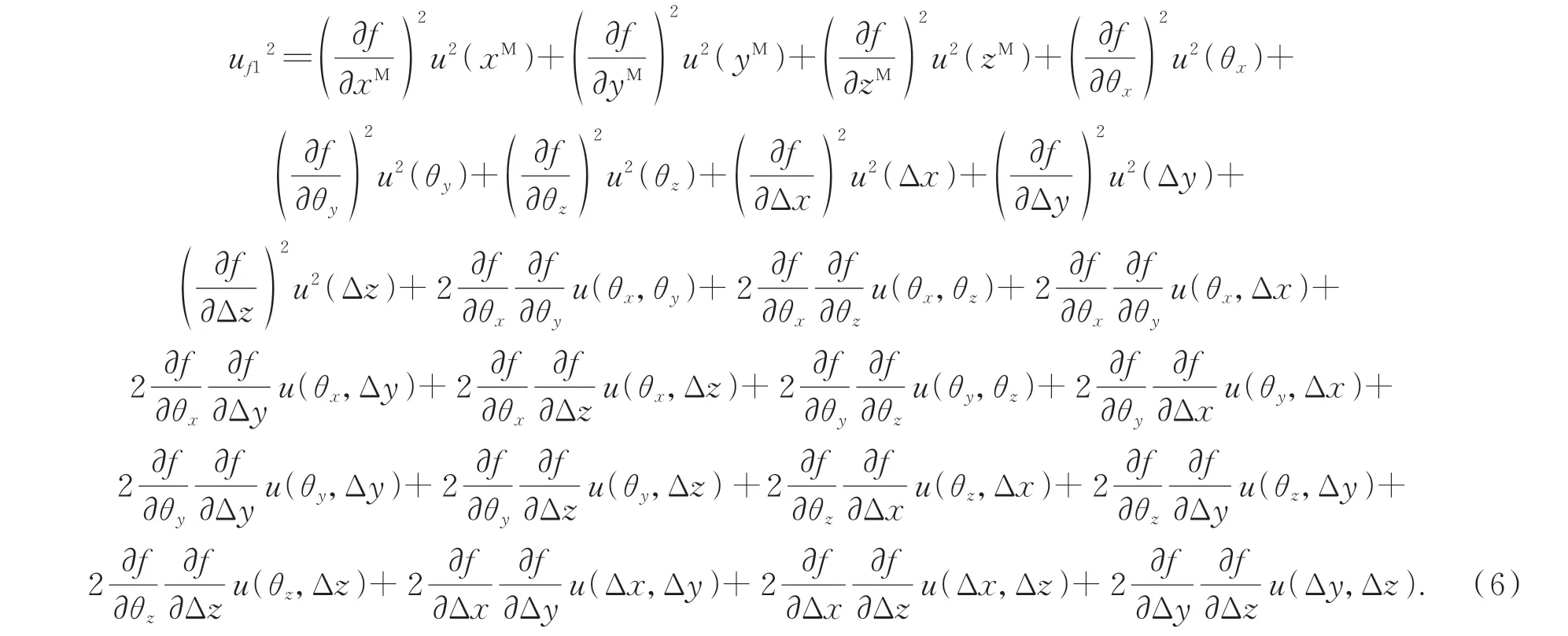
分析式(5)可知,輪廓度誤差與測量極大值點(diǎn)坐標(biāo)、轉(zhuǎn)換參數(shù)和最近點(diǎn)坐標(biāo)有關(guān),而最近點(diǎn)是經(jīng)坐標(biāo)變換后確定的,不用考慮最近點(diǎn)引入的不確定度。多次測量會(huì)使得測量極大值點(diǎn)之間存在不確定度,也會(huì)導(dǎo)致變換參數(shù)矩陣之間存在不確定度,而且具有相關(guān)性。假定極大值點(diǎn)在3個(gè)方向的不確定度分量是互相獨(dú)立的,而轉(zhuǎn)換參數(shù)之間是具有相關(guān)性的。根據(jù)方差合成定理以及不確定度傳播規(guī)律,可得自由曲面輪廓度的不確定度表達(dá)式為:
將6個(gè)轉(zhuǎn)換參數(shù)看作是統(tǒng)計(jì)量,得到n組旋轉(zhuǎn)平移量,其協(xié)方差矩陣表達(dá)式如下:

在同一條件下重復(fù)測量n次,測量極大值點(diǎn)可由n次測量結(jié)果計(jì)算方差表示其坐標(biāo)的不確定度。各個(gè)變量的靈敏度系數(shù)通過對(duì)式(5)求偏導(dǎo)得到。
4 基于黑箱模型的不確定度分析與建模
4.1 不確定度分析
基于量值統(tǒng)計(jì)的黑箱模型是指將復(fù)雜的函數(shù)關(guān)系簡化成具有激勵(lì)源輸入的測量方法,其優(yōu)點(diǎn)是假定各個(gè)不確定度分量的靈敏度系數(shù)為1,省去了偏導(dǎo)求解的復(fù)雜計(jì)算過程,只需要找出不確定度分量即可。藍(lán)光掃描儀在獲取和處理三維點(diǎn)云信息的過程中涉及許多誤差影響,這些誤差使得采集的點(diǎn)云數(shù)據(jù)精度受限,復(fù)雜的測量任務(wù)必然伴隨著量值傳遞,而測量系統(tǒng)的誤差則伴隨著量值傳遞體現(xiàn)在測量結(jié)果中。本文通過分析整個(gè)測量系統(tǒng)的測量原理和評(píng)定準(zhǔn)則,從黑箱模型的角度將儀器示值誤差、自校準(zhǔn)誤差、點(diǎn)云拼接誤差、點(diǎn)云配準(zhǔn)誤差、重復(fù)性、復(fù)現(xiàn)性以及儀器分辨力等量值特性指標(biāo)作為測量系統(tǒng)的不確定度分量,為評(píng)價(jià)測量系統(tǒng)提供支持。
4.2 不確定度建模
藍(lán)光掃描儀的說明書沒有給出示值誤差,故需要設(shè)計(jì)實(shí)驗(yàn)得到儀器的示值誤差。結(jié)合實(shí)驗(yàn)條件采用陶瓷標(biāo)準(zhǔn)球作為實(shí)驗(yàn)裝置,根據(jù)國家計(jì)量技術(shù)規(guī)范JJF1059.1-2012《測量不確定度評(píng)定與表示》,測量結(jié)果的平均值和重復(fù)性實(shí)驗(yàn)以10次的測量結(jié)果為佳[20],取其重復(fù)性均值降低隨機(jī)誤差的影響,假設(shè)其服從均勻分布,示值誤差量化后為:
藍(lán)光掃描儀在使用前需要對(duì)相機(jī)進(jìn)行自校準(zhǔn),將相機(jī)的鏡頭畸變、硬件結(jié)構(gòu)誤差合成,經(jīng)Optocat軟件處理后可得誤差為Ubd,則自校準(zhǔn)誤差引入的不確定度分量為:

三維數(shù)據(jù)的拼接是將兩個(gè)或者兩個(gè)以上的點(diǎn)云集合轉(zhuǎn)換到同一坐標(biāo)系下[21]。由于藍(lán)光掃描儀的測量視角較小、被測工件超出其測量范圍,掃描一次不能實(shí)現(xiàn)工件上輪廓度的測量,需要多角度多次掃描。在測量時(shí),調(diào)整掃描儀的角度以及快門設(shè)置,使得點(diǎn)云集合之間有重合部分,經(jīng)拼接實(shí)現(xiàn)工件表面信息的重構(gòu),數(shù)據(jù)點(diǎn)集之間進(jìn)行拼接時(shí)存在姿態(tài)偏差,多次掃描必然會(huì)引起誤差傳遞。
數(shù)據(jù)拼接的實(shí)質(zhì)是通過旋轉(zhuǎn)、平移參數(shù)實(shí)現(xiàn)坐標(biāo)轉(zhuǎn)換。實(shí)驗(yàn)選擇包括曲面的兩個(gè)區(qū)域,分別掃描10次,將10次拼接重合部分的標(biāo)準(zhǔn)偏差si的均值作為點(diǎn)云拼接引入的不確定度分量,即有:
在CAD數(shù)模已知的前提下,實(shí)測點(diǎn)集經(jīng)拼接后需要和CAD進(jìn)行配準(zhǔn)。大多數(shù)軟件都利用同名點(diǎn)的坐標(biāo)解算,通過旋轉(zhuǎn)和平移把測量點(diǎn)統(tǒng)一在CAD數(shù)模所在的坐標(biāo)系實(shí)現(xiàn)坐標(biāo)配準(zhǔn),因此在對(duì)齊過程中配準(zhǔn)誤差是不可避免的。將10次坐標(biāo)配準(zhǔn)的標(biāo)偏差ri的均值作為配準(zhǔn)引入的不確定度分量,即:
重復(fù)性是不確定度評(píng)定必不可少的分量之一,經(jīng)上述拼接、配準(zhǔn)后計(jì)算輪廓度誤差值。重復(fù)性引入的不確定度分量用貝塞爾公式表示為:

其中:fi表示輪廓度誤差;n表示測量次數(shù);N是指取N次測量結(jié)果的平均值作為最佳估計(jì)值。
不同測量人員獨(dú)立重復(fù)測量m組,求出每一組測量列的平均值,將每組得到的均值重新組成一個(gè)測量列,將新的測量列作為復(fù)現(xiàn)性引入的不確定度分量,即:

式中:m為測量的組數(shù);為第j組重復(fù)測量列的均值為m組測量列的均值的均值。
即使藍(lán)光掃描儀提前預(yù)熱,依然無法完全消除穩(wěn)定性的影響,在所有測量條件都不改變的情況下,對(duì)工件間隔24 h重復(fù)測量3次,每次測量10組數(shù)據(jù),計(jì)算每組的輪廓度均值,得到最大值fmax和最小值fmin。假設(shè)服從高斯分布(分布因子為0.5),則穩(wěn)定性引起的不確定度分量為:

將上述不確定度分量進(jìn)行合成,可得基于黑箱模型的不確定度分量為:

5 測量實(shí)驗(yàn)與結(jié)果
使用海克斯康的PrimeScan掃描儀,其視場為130 mm×85 mm×78 mm,分辨率為69 μm,工作距離為370 mm。實(shí)驗(yàn)選擇儀器廠家海克斯康提供的標(biāo)準(zhǔn)實(shí)驗(yàn)件,此工件上的曲面為自由曲面。故以某工件上的曲面輪廓度為被測對(duì)象。在恒溫恒濕的實(shí)驗(yàn)室內(nèi),通過Optocat軟件完成藍(lán)光掃描儀對(duì)工件表面信息的采集。Optocat軟件是和藍(lán)光掃描儀配套的三維采集軟件,涉及掃描過程的整個(gè)任務(wù)范圍。其數(shù)據(jù)采集過程如圖3所示。
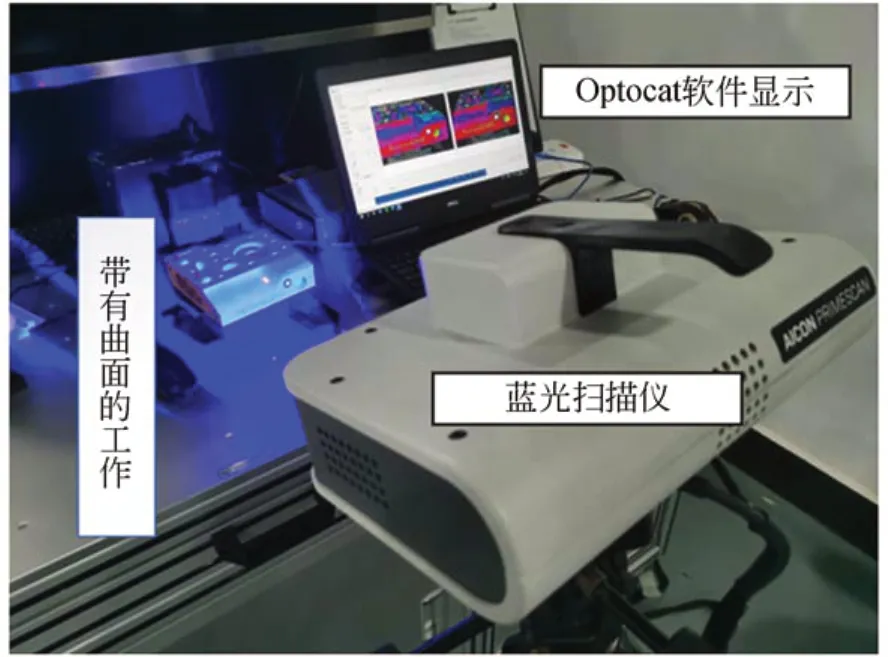
圖3 藍(lán)光掃描儀測量曲面輪廓度Fig.3 Measurement of surface profile by blue scanner
在Polyworks軟件實(shí)現(xiàn)曲面輪廓度誤差的測量。綜上可知,曲面輪廓度誤差與坐標(biāo)轉(zhuǎn)換有關(guān)。曲面輪廓度評(píng)定時(shí)的操作步驟如圖4所示。
5.1 透明箱模型的不確定度評(píng)定
在Polyworks中,采用“最佳擬合數(shù)據(jù)至參考對(duì)象”,以綜合偏差最小為目標(biāo)來求取最佳匹配時(shí)的R和T,當(dāng)?shù)Y(jié)果小于10-6時(shí)滿足最佳匹配,采樣選擇“1/1”,經(jīng)多次實(shí)驗(yàn)調(diào)整,將最大角度設(shè)置為45°,最大距離設(shè)置為0.1 mm,使用“N點(diǎn)對(duì)齊”后實(shí)現(xiàn)預(yù)對(duì)齊。此時(shí)10次測量實(shí)驗(yàn)坐標(biāo)配準(zhǔn)的迭代值分別為0.111×10-6,0.106×10-6,0.109×10-6,0.288×10-6,0.182×10-6,0.262×10-6,0.200×10-6,0.115×10-6,0.225×10-6,0.189×10-6。通過“最佳擬合對(duì)齊”操作實(shí)現(xiàn)精確對(duì)齊,其坐標(biāo)轉(zhuǎn)換矩陣如下:
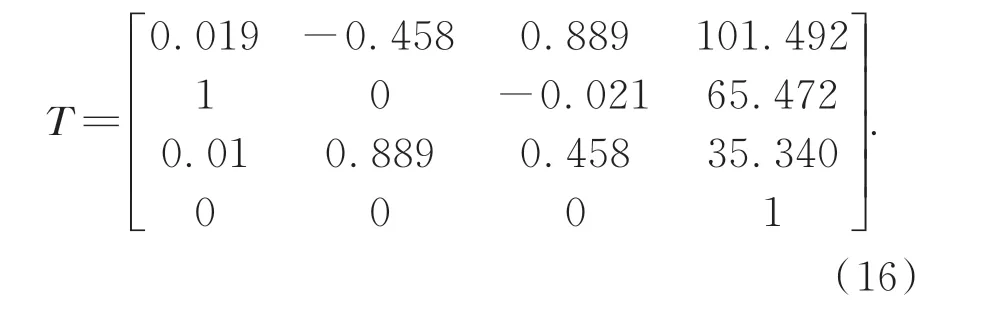
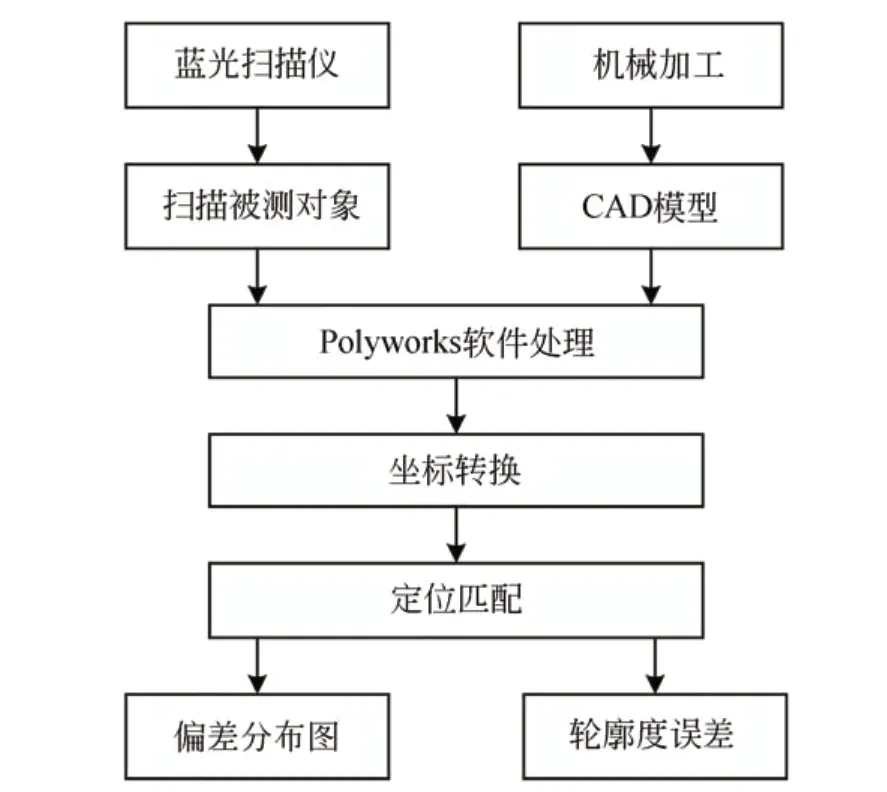
圖4 曲面輪廓度評(píng)定流程Fig.4 Flow chart of surface profile evaluation
根據(jù)上述坐標(biāo)轉(zhuǎn)換矩陣可以求得旋轉(zhuǎn)平移量。在藍(lán)光掃描儀的掃描角度和快門設(shè)置不變的情況下,短時(shí)間內(nèi)重復(fù)掃描10次,得到的旋轉(zhuǎn)平移參數(shù)如表1所示。
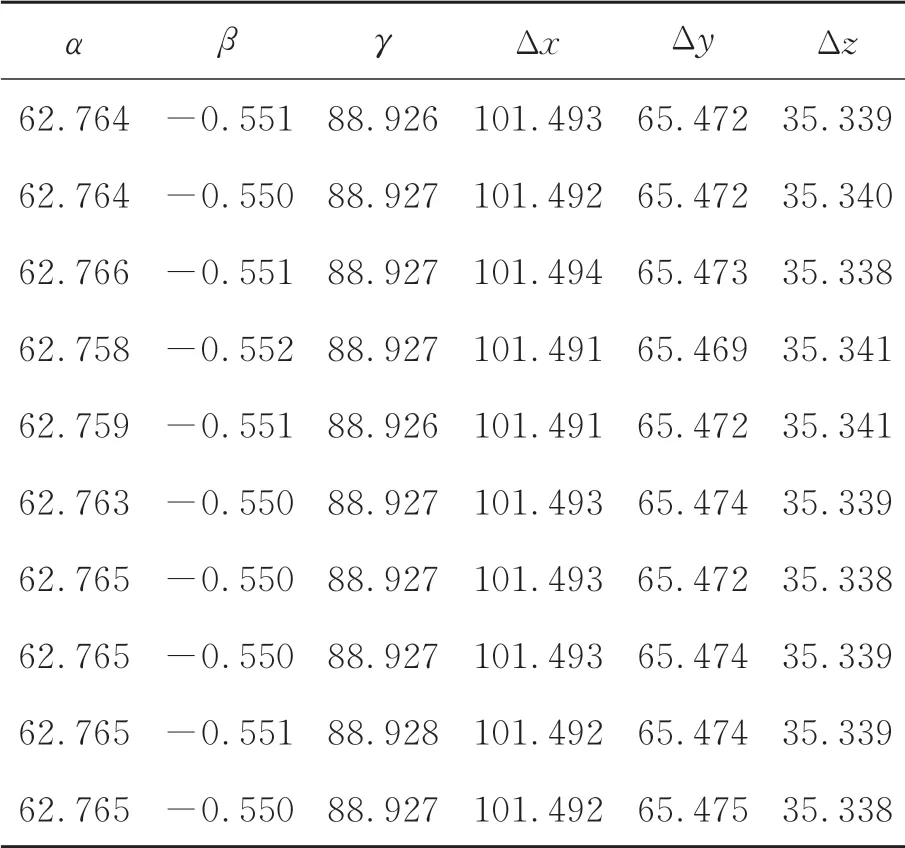
表1 旋轉(zhuǎn)平移參數(shù)Tab.1 Values of rotation and translation parameters
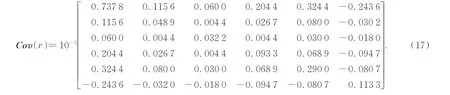
SPSS軟件不僅提供數(shù)據(jù)處理和數(shù)據(jù)分析等操作,而且涵蓋各種方法和模型,對(duì)于協(xié)方差矩陣的求解是便利的。將表1中數(shù)據(jù)利用SPSS軟件計(jì)算可得到其協(xié)方差矩陣值為:
測量10次,每次測量都有一個(gè)定位點(diǎn)和相應(yīng)的最近點(diǎn),測量數(shù)據(jù)如表2所示。通過坐標(biāo)轉(zhuǎn)換可以得到定位點(diǎn)在測量坐標(biāo)系下的極大值點(diǎn)。極大值點(diǎn)在3個(gè)方向的不確定度可依據(jù)貝塞爾公式計(jì)算。將上述數(shù)據(jù)帶入到式(5)中并求偏導(dǎo),可得靈敏度系數(shù)如表3所示。
將上述所得結(jié)果帶入式(6)中,最終可得曲面輪廓度的不確定度uf1=0.020 mm。
取包含因子為k=2,擴(kuò)展不確定度為:

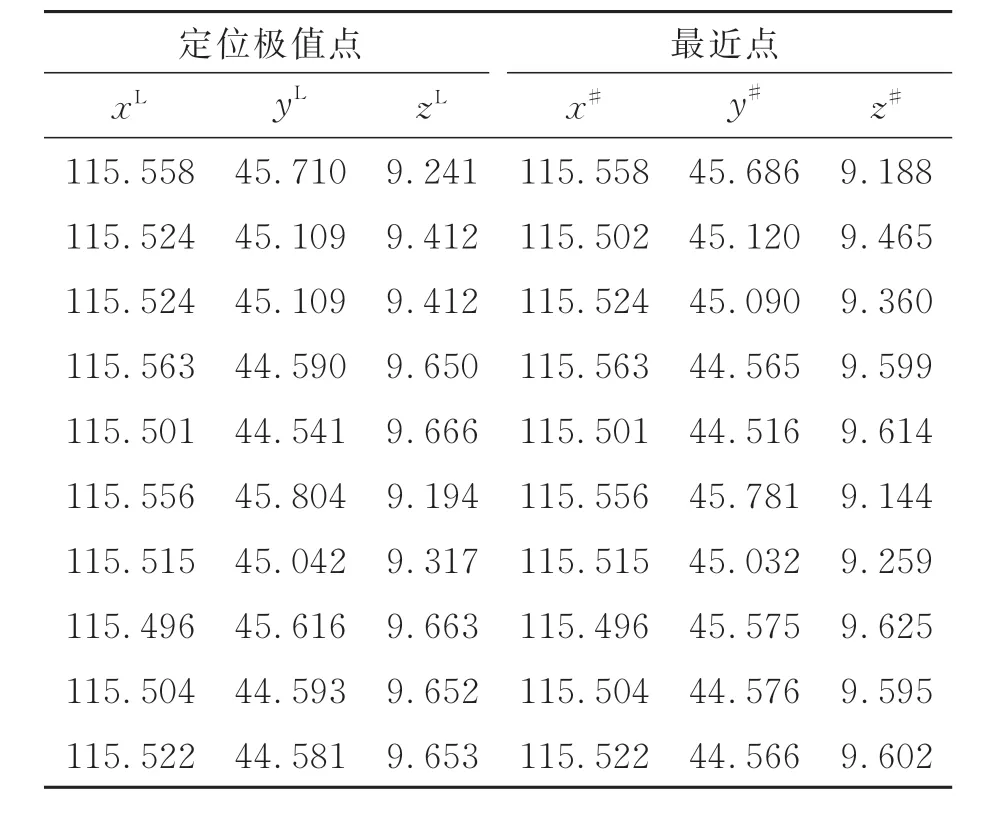
表2 定位極值點(diǎn)及最近點(diǎn)的坐標(biāo)值Tab.2 Locating coordinate values of extreme points and nearest points (mm)
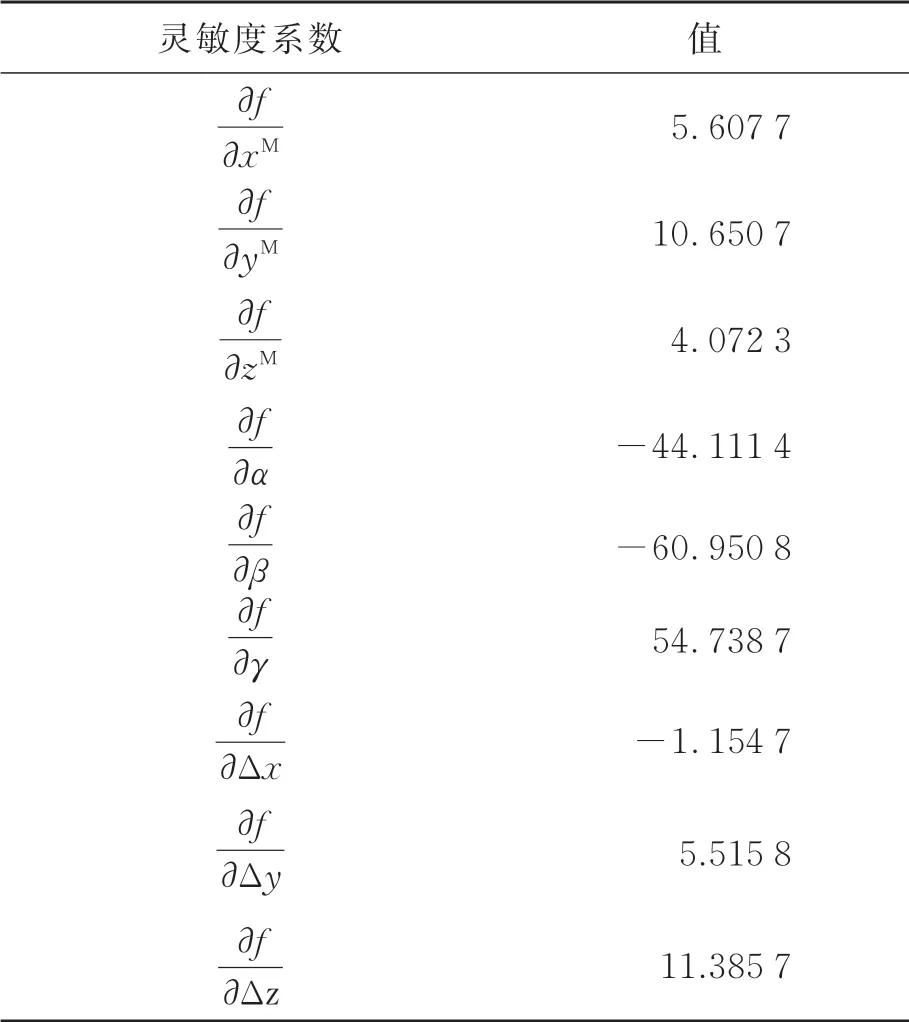
表3 靈敏度系數(shù)Tab.3 Sensitivity coefficients (mm)
5.2 黑箱模型的不確定度評(píng)定
實(shí)驗(yàn)采用標(biāo)準(zhǔn)球作為校準(zhǔn)裝置,采用海克斯康的global S 09.12.08-green三坐標(biāo)測量機(jī)標(biāo)準(zhǔn)球。坐標(biāo)測量機(jī)的最大示值允許誤差為:MPEE=(1.7+2.8 L/1 000)μm。其標(biāo)準(zhǔn)球直徑值30.005 5 mm是三坐標(biāo)測量機(jī)的實(shí)測值,則標(biāo)定實(shí)驗(yàn)引入的測量不確定度為:
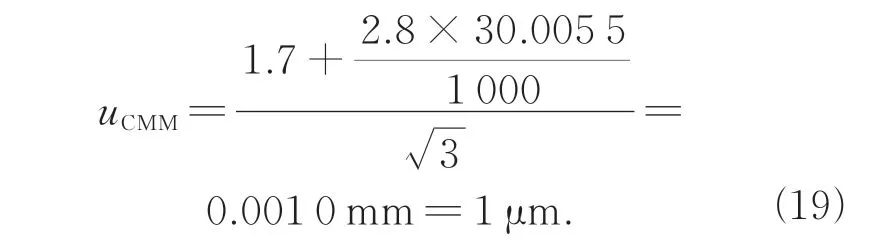
對(duì)于用標(biāo)準(zhǔn)球標(biāo)定藍(lán)光掃描儀示值誤差來說,標(biāo)準(zhǔn)球直徑值30.005 5 mm的不確定度為1 μm,可以忽略不計(jì)。
藍(lán)光掃描儀對(duì)標(biāo)定后的標(biāo)準(zhǔn)球重復(fù)測量10次,經(jīng)擬合后得到標(biāo)準(zhǔn)球的實(shí)測值,取其均值與理論值進(jìn)行比較,消除隨機(jī)誤差的影響,從而得到藍(lán)光掃描儀的示值誤差。其實(shí)驗(yàn)過程及擬合效果如圖5所示。
經(jīng)最佳擬合后,標(biāo)準(zhǔn)球直徑的10次測量結(jié)果為30.022,30.018,30.020,30.024,30.024,30.021,30.020,30.018,30.011,30.024 mm。將上述數(shù)據(jù)代入式(8)中得到:
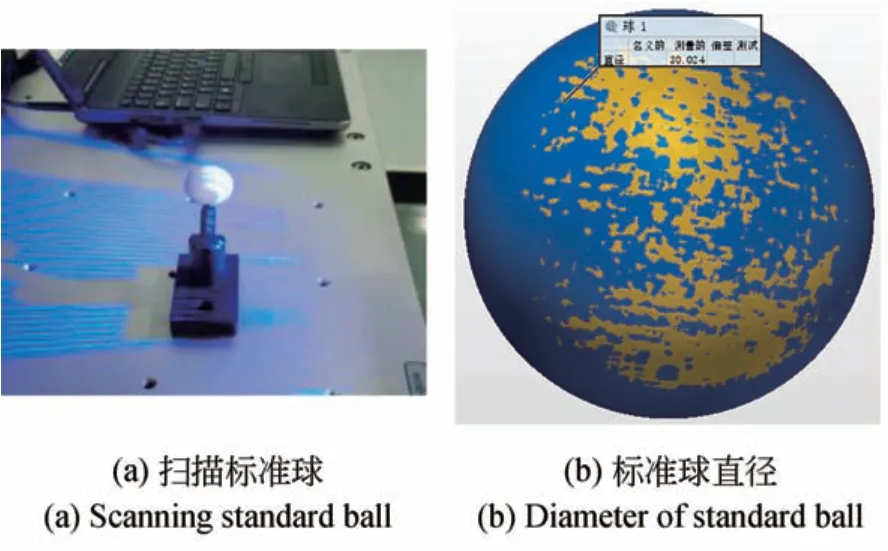
圖5 藍(lán)光掃描儀測量標(biāo)準(zhǔn)球Fig.5 Measuring standard ball by blue light scanner
借助配套的校準(zhǔn)板,將標(biāo)準(zhǔn)球移動(dòng)到工作距離內(nèi),使用9個(gè)標(biāo)準(zhǔn)位置執(zhí)行校準(zhǔn),不僅對(duì)照相機(jī)的圖像計(jì)算校準(zhǔn),而且對(duì)投影設(shè)備也進(jìn)行校準(zhǔn)。校準(zhǔn)完成后,可得標(biāo)定誤差為Ubd=6 μm,則標(biāo)定誤差帶來的不確定度分量為:

在數(shù)據(jù)拼接前需進(jìn)行預(yù)處理,通過非接觸測量獲取的數(shù)據(jù),在曲率變化較大的表面或者尖銳邊緣會(huì)出現(xiàn)噪聲點(diǎn),故先去除多余的雜點(diǎn)和噪聲,再調(diào)用Polyworks軟件的“最佳擬合數(shù)據(jù)至數(shù)據(jù)對(duì)象”操作實(shí)現(xiàn)拼接,重合部分的拼接結(jié)果如圖6所示。重合部分經(jīng)擬合后得到的拼接偏差如圖7所示。
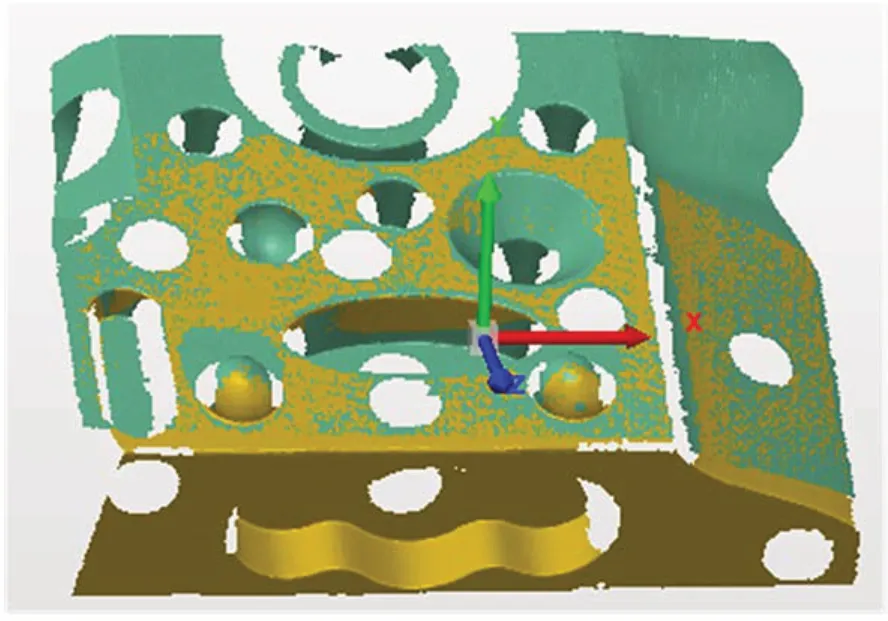
圖6 數(shù)據(jù)點(diǎn)集的拼接Fig.6 Splicing of data point sets
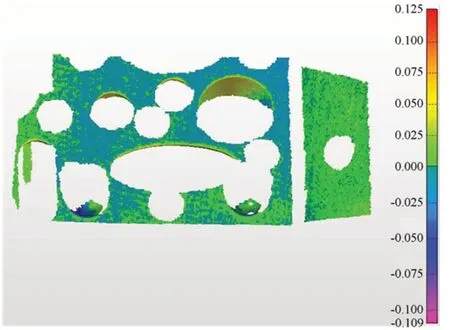
圖7 數(shù)據(jù)點(diǎn)集重合部分的偏差Fig.7 Deviation of overlapping part of data point set
10次拼接的標(biāo)準(zhǔn)偏差分別是0.013,0.013,0.014,0.013,0.013,0.012,0.013,0.014,0.014,0.013 mm,帶入到式(10)可得點(diǎn)云拼接引入的平均標(biāo)準(zhǔn)偏差,即標(biāo)準(zhǔn)不確定度分量為:
將CAD數(shù)模和實(shí)測點(diǎn)集分別作為參考對(duì)象和數(shù)據(jù)對(duì)象,經(jīng)多次實(shí)驗(yàn),設(shè)置最大距離為1 mm以及最大角度為45°,實(shí)現(xiàn)實(shí)測曲面與理論曲面的最佳匹配對(duì)齊,點(diǎn)云至數(shù)模的配準(zhǔn)示意圖如圖8所示。
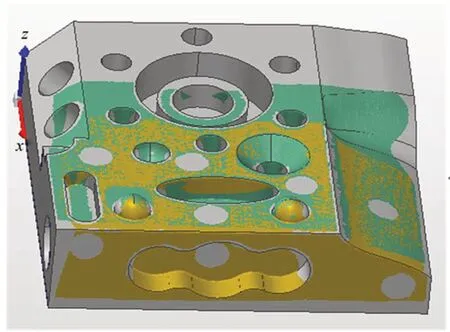
圖8 點(diǎn)云至CAD數(shù)模的坐標(biāo)配準(zhǔn)Fig.8 Coordinate registration from point cloud to CAD
由于評(píng)價(jià)對(duì)象是曲面輪廓度,故在Polyowrks軟件只選擇制定的曲面區(qū)域,該區(qū)域所有的采集點(diǎn)都參與計(jì)算,曲面部分的點(diǎn)云至CAD數(shù)模配準(zhǔn)結(jié)果的偏差分析圖如圖9所示。10次配準(zhǔn)結(jié)果的標(biāo)準(zhǔn)偏差分別是0.017,0.017,0.016,0.016.0.016,0.016,0.017,0.016,0.016,0.016 mm,帶入到式(11)可得點(diǎn)云配準(zhǔn)引入的平均標(biāo)準(zhǔn)偏差,即標(biāo)準(zhǔn)不確定度分量為:
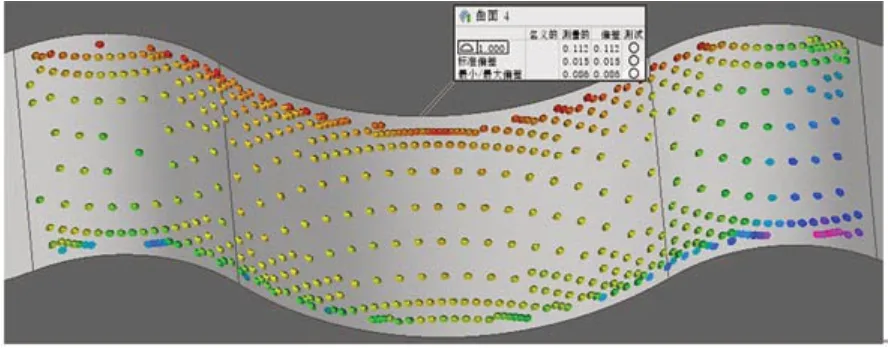
圖9 點(diǎn)云至數(shù)模配準(zhǔn)的偏差圖Fig.9 Deviation graph of point cloud to digital-analog registration
不同測量人員測量的輪廓度如表4所示。
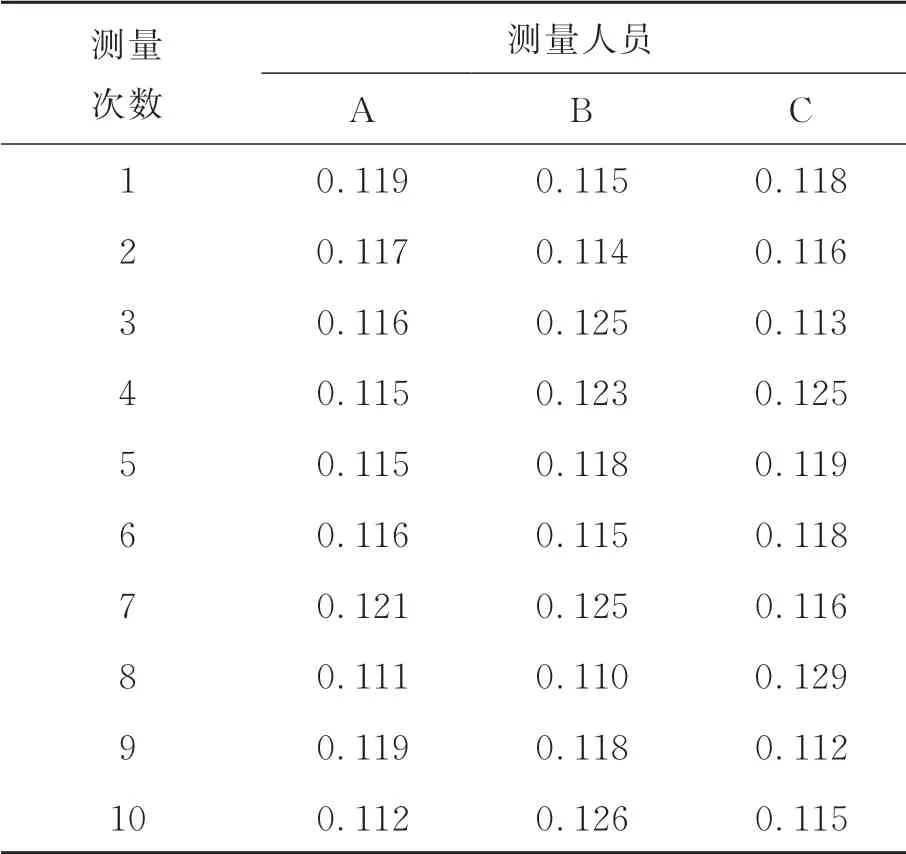
表4 不同測量人員的測量結(jié)果Tab.4 Measurement results by different measuring personnel (mm)
測量結(jié)果的重復(fù)性反映的是隨機(jī)效應(yīng)的影響,從表中抽取某位操作人員的測量數(shù)據(jù)作為重復(fù)性考察指標(biāo)。將表4中操作人員A的測量數(shù)據(jù)代入式(12)中,可得重復(fù)性引入的不確定度分量為:
將操作人員A的數(shù)據(jù)帶入式(13)中,可得復(fù)現(xiàn)性的不確定度分量為:

藍(lán)光掃描儀和校準(zhǔn)板提前24 h處于恒溫恒濕的環(huán)境中,減少其特性因時(shí)間流逝而發(fā)生微小變化,正式測量前傳感器提前打開30~60 min,使得照相機(jī)和鏡頭預(yù)熱到合適的工作溫度。在測量條件不變的情況下,3天測量中的最大均值fmax=0.120 6 mm,最小均值fmin=0.113 1 mm。將它們代入式(14)可得穩(wěn)定性引入的不確定度分量為:

根據(jù)方差合成定理,整個(gè)測量任務(wù)的合成標(biāo)準(zhǔn)不確定度為:

取包含因子為k=2,擴(kuò)展不確定度為:

5.3 評(píng)定結(jié)果比較
誤差源分析的不確定度主要與測量的極大值點(diǎn)和相應(yīng)的最近點(diǎn)坐標(biāo)以及轉(zhuǎn)換參數(shù)有關(guān)。量值統(tǒng)計(jì)分析主要是從測量結(jié)果的量值特性作為不確定度分量。后者較前者計(jì)算簡單、效率高。如表5所示,其標(biāo)準(zhǔn)不確定度相差3 μm,擴(kuò)展不確定度相差6 μm,滿足精度要求。量值統(tǒng)計(jì)方法可以用于藍(lán)光掃描儀面向曲面輪廓度的不確定度可靠評(píng)定。
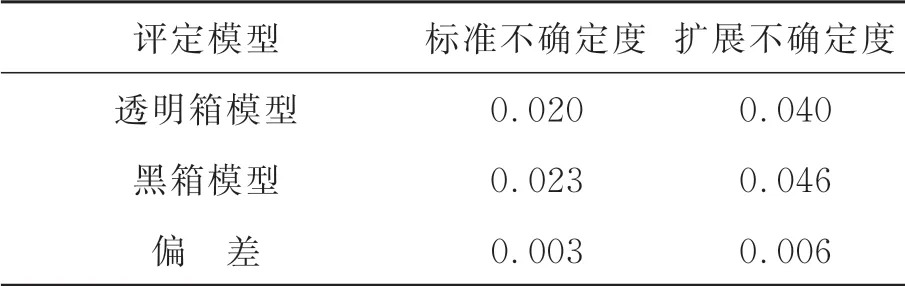
表5 兩種評(píng)定模型的比較Tab.5 Comparison of two evaluation models(mm)
6 結(jié)論
為解決面結(jié)構(gòu)光類儀器測量自由曲面特征的不確定度溯源問題,本文基于誤差源分析和量值統(tǒng)計(jì)方法提出了兩種不同的不確定度分析思路,分別建立了透明箱模型和黑箱模型,相比于透明箱模型,運(yùn)用黑箱模型實(shí)現(xiàn)輪廓度的不確定度評(píng)定具有簡便、高效的優(yōu)點(diǎn)。實(shí)驗(yàn)結(jié)果表明,透明箱模型得到的自由曲面測量結(jié)果的不確定度為0.020 mm,黑箱模型得到的自由曲面測量結(jié)果的不確定度為0.023 mm,兩者之間的偏差在μm級(jí),驗(yàn)證了簡單高效的黑箱模型可以實(shí)現(xiàn)藍(lán)光掃描儀面向曲面輪廓度的不確定度可靠評(píng)定。本文提出的方法為自由曲面輪廓度表征的質(zhì)量指標(biāo)提供了量化手段,解決了結(jié)構(gòu)光式掃描儀及類似三維測量儀器的自由曲面測量不確定度溯源問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
