基于有限元法的淺海移動平臺機械結構分析
2022-09-19 02:13:42吳中正方之遙董奇峰紀曉宇
起重運輸機械 2022年16期
吳中正 方之遙 董奇峰 紀曉宇
1中交第二航務工程局有限公司 武漢 430040 2長大橋梁建設施工技術交通行業重點實驗室 武漢 430040 3交通運輸行業交通基礎設施智能制造技術研發中心 武漢 30040 4中交公路長大橋建設國家工程研究中心有限公司 武漢 430040
0 引言
隨著國家綜合實力的不斷增強,國家對海洋領域的資源開發和領土權益保護愈發重視,將海洋工程裝備作為重點研究領域之一,納入我國戰略性新興產業高端裝備制造業的重要組成部分[1]。淺海移動平臺集自行走、自動調平功能于一體,是一款應用于淺海領域的海上施工現代化工程裝備。
如圖1所示,淺海移動平臺主要由履帶輪組、懸掛支腿、機架以及液壓站組成。其中,履帶輪組中的履帶能增大輪組與地面的接觸面積,使淺海移動平臺可以在松軟地面和沙灘上行走,提高了施工平臺對復雜地形的適應性;懸掛支腿結構如圖2所示,主要由內套筒、固定導向套、移動導向套、外套筒和內置懸掛液壓缸組成,外套筒與固定導向套固連,內套筒與移動導向套固連,當懸掛液壓缸運動時,可驅動內套筒相對外套筒移動。由于外套筒與機架固連,內套筒與履帶輪組鉸接,所以當內置懸掛液壓缸驅動懸掛支腿內、外套筒相對運動時,可實現淺海移動平臺的調平,從而提高了施工平臺在移動行走和靜止作業時的穩定性;機架主要由與懸掛支腿固連的機械結構件組成,主要功能為穩定平臺結構、搭載施工作業。懸掛支腿和機架構成了淺海移動平臺的主體框架機械結構。主體框架機械結構是淺海移動平臺的主體承重構件,其結構強度和動態特性對淺海移動平臺的施工作業穩定性、安全性至關重要,故對主體框架關鍵部件機械結構進行分析的環節必不可少。
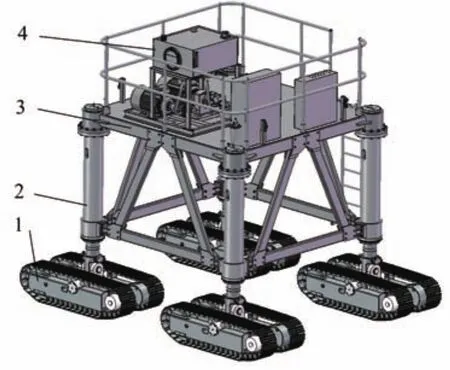
圖1 淺海移動平臺結構圖
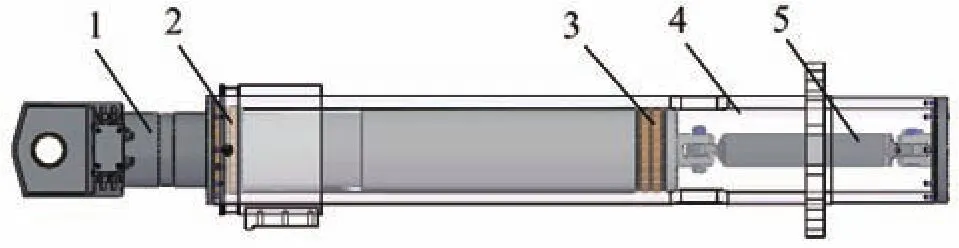
圖2 懸掛支腿結構圖
有限元法是機械結構設計和性能分析常用的技術手段之一,能對機械結構的靜態和動態特性進行有效的分析,為常規結構設計和可靠性校核提供參考[2]。其中,靜態分析主要指靜力學分析,主要分析機械結構的強度和剛度;動態分析往往指模態分析,主要分析機械結構的固有振動特性。本文采用有限元法對淺海移動平臺的主體框架機械結構進行靜力學分析和模態分析,為海洋施工平臺的設計和研究提供理論依據。
1 主體結構實體模型建立
虛擬樣機技術能根據設計所需模擬真實的物理環境,為復雜機械結構的設計、優化和仿真模擬提供良好的操作平臺,使設計人員能夠從外觀、結構特性等多方面對機械結構進行分析和驗證,因此,廣泛應用于工程機械、農業機械、航空航天等多個工程領域,是現代結構設計不可或缺的關鍵技術之一[3]。采用有限元法對機械結構進行分析時,計算模型的準確性十分重要。淺海移動平臺主體機械結構較為復雜,故采用虛擬樣機技術對其進行建模和仿真計算研究。
對淺海移動平臺主體結構建模時,根據等效剛度代換理論,將具體分析模型結構進行有效的簡化處理。對淺海移動平臺主體機械結構進行如下簡化處理:1)簡化各部件配合和連接形式 將機架各桿件之間、機架與懸掛支腿之間、懸掛支腿各零部件之間的螺栓連接簡化為面接觸。2)簡化非關鍵位置的細部特征 忽略不影響整體受力特性、不處于核心受力位置的倒角、圓角和螺紋孔,忽略機架結構上的圍欄、爬梯、液壓站等輕型輔助結構件并進行等效質量分布。
通過上述簡化處理,在SolidWorks中建立了淺海移動平臺在懸掛支腿處于最大行程位置工況下的主體機械結構實體模型,整體結構尺寸為:3 m×3 m×2.3 m,如圖3所示。在建模過程中,根據實際設計需要對各零部件賦予對應的材料屬性。其中,機架各桿件、板件和懸掛支腿內套筒、外套筒賦予材料Q235,彈性模量E=210 GPa,泊松比ε=0.274,密度ρ=7 850 kg/m3;移動導向套和固定導向套賦予材料錫磷青銅,彈性模量E=110 GPa,泊松比ε=0.341,密度ρ=8 780 kg/m3。

圖3 主體結構實體模型
2 核心部件機械結構靜力學分析
懸掛支腿下端鉸接履帶輪組,上端與桿件構成整個淺海移動平臺的主體框架,在整個平臺結構中起到承上啟下、穩定機身主體的作用,是淺海移動平臺的關鍵零部件,也是核心的受力部件,故需要對懸掛支腿進行機械結構靜力學分析。
2.1 受力分析
當淺海移動平臺在以最快速度運動時突然制動,此時懸掛支腿處于極限受力狀態,不計懸掛支腿自身質量,對此時懸掛支腿的受力情況進行受力分析,受力簡圖如圖4所示。其中,Fx、Fy為履帶輪組作用在與懸掛支腿鉸接位置處的反力,F為淺海移動平臺整機重心在突然制動時分布在該懸掛支腿上的慣性力總和,F1、F2為F通過機架分布在懸掛支腿上的作用力,FG為整機分布作用在該支腿上的重力,L1、L2和L分別為F1、F2和F相對于鉸接點位置處的距離,M為履帶輪組作用在與懸掛支腿鉸接位置處的反力矩。
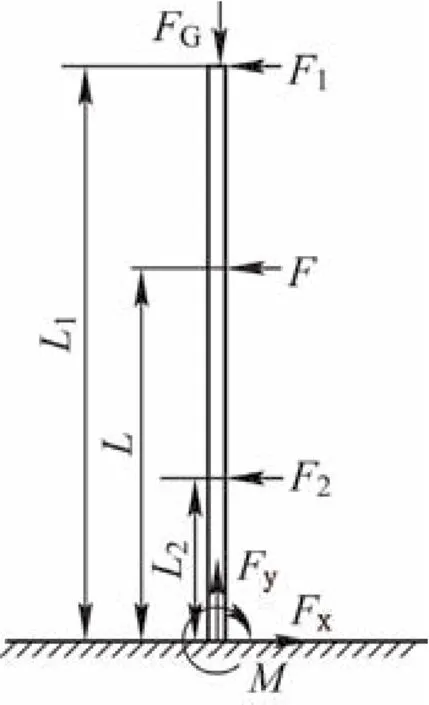
圖4 單懸掛支腿受力簡圖
將各分力進行聯立,有
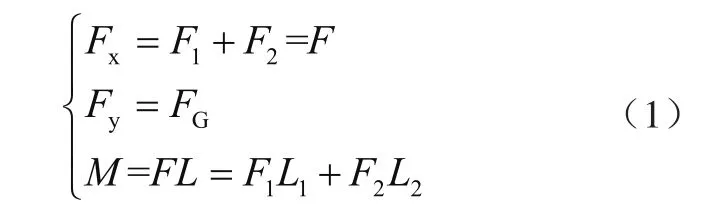
式中:F=51 430 N,FG=43 740 N,L1=2 300 mm,L2=655 mm,L=1 491 mm。
經計算可得:Fx=51 430 N,Fy=43 740 N,F1=26 130 N,F2=25 300 N,M=76 682 N·m。其中,F1、F2、FG為對懸掛支腿整體結構進行有限元靜力學分析時的添加載荷。
2.2 懸掛支腿靜態特性分析
靜態特性分析是指結構在一定約束條件中,添加靜力載荷作用下的響應特性,也稱靜力學分析。本文使用SolidWorksSimulation模塊進行懸掛支腿的機械結構靜力學分析。
對懸掛支腿整體結構進行約束和載荷的添加,如圖5所示。首先,根據懸掛支腿實際約束情況,將其與履帶輪組相接觸的位置施加固定幾何體約束;其次,根據上一節的受力分析結果,在懸掛支腿上部分相應位置添加與F1、FG對應方向和大小的載荷,在下部分相應位置添加與F2對應方向和大小的載荷;然后,對懸掛支腿實體模型進行自動網格劃分,劃分結果為35 987個節點、19 884個單元,最大網格尺寸不大于40 mm;最后,對懸掛支腿有限元模型進行解算。
懸掛支腿機械結構靜力學分析結果如圖5、圖6所示。由圖5可以看出,懸掛支腿在極限工況下應力集中發生在靠近履帶輪組位置處的內套筒上,最大應力為115 MPa。根據第四強度理論,懸掛支腿材料選用Q235,安全系數取2[5],許用應力為117.5 MPa,在設計強度范圍以內,懸掛支腿強度合格。
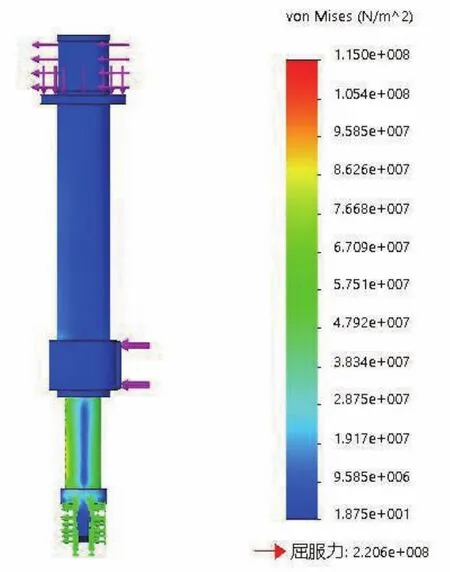
圖5 懸掛支腿應力分布
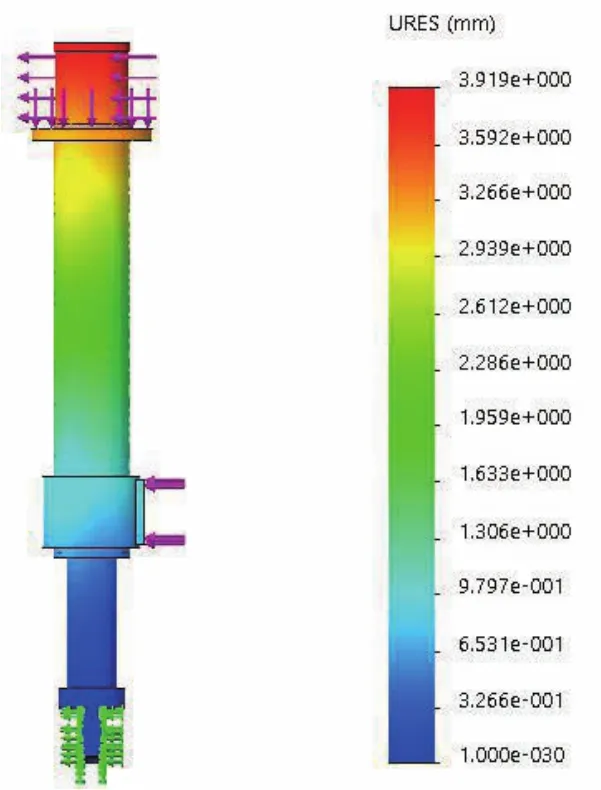
圖6 懸掛支腿形變位移分布
由圖6可以看出,懸掛支腿在極限工況下最大位移發生在支腿結構最上端,為3.9 mm,小于懸掛支腿長度的1/500(4.6 mm),在設計變形范圍以內,懸掛支腿剛度合格。
3 主體結構模態分析
液壓站位于淺海移動平臺的作業平臺上,由于液壓站的原動機在工作時會產生振動,為避免該振動引起整個機身的共振,在進行機械結構設計和液壓站原動機選型時應協同考慮。故有必要對淺海移動平臺主體機械結構進行模態分析。
3.1 模態分析基本理論
模態反映了結構在按某一階固有頻率振動時,結構上各點偏離其平衡位置所遵循的比例關系。模態分析主要用來獲取研究對象的模態參數,如頻率、振型等,是對機械結構動態特性的研究方法之一[6]。通常,模態分析不需要考慮外部載荷等因素,僅考慮結構的質量矩陣和剛度矩陣即可[7],其方程為

式中:[M]為質量矩陣,{x''}為加速度矩陣,[K]為剛度矩陣,{x}為位移矩陣。假設該系統為線性系統,則x(t)可轉化為

式中:{φ}i為第i階固有頻率振型函數,ωi為第i階固有圓頻率。將式(3)代入式(2)中可得

由于{φ}≠{0},故

求解式(5)即可得系統第i階固有頻率振型函數{φ}i和固有圓頻率ωi。通常,在有限元分析軟件中得到的頻率結果為自然頻率,自然頻率與圓頻率轉換關系為

式中:fi為自然頻率,ωi為圓頻率。
3.2 模態分析
本文使用Ansys Workbench對懸掛支腿進行有限元模態分析,將SolidWorks中淺海移動平臺主體機械結構實體模型導入到Ansys Workbench軟件的中Modal模塊。
首先對淺海移動平臺主體機械結構進行自動網格劃分,共212 410個節點和73 639個單元;然后在4個懸掛支腿上添加與靜力學分析時相同的約束,由于載荷和位姿基本不會影響物體結構的固有頻率和振型[8],故不添加任何載荷;最后進行解算。在工程上一般取結構的前六階頻率即可,對淺海移動平臺主體機械結構進行前六階模態分析結果如圖7,振型圖分析結果如表1所示。

表1 模態分析表(振型以圖7中坐標軸為參考)
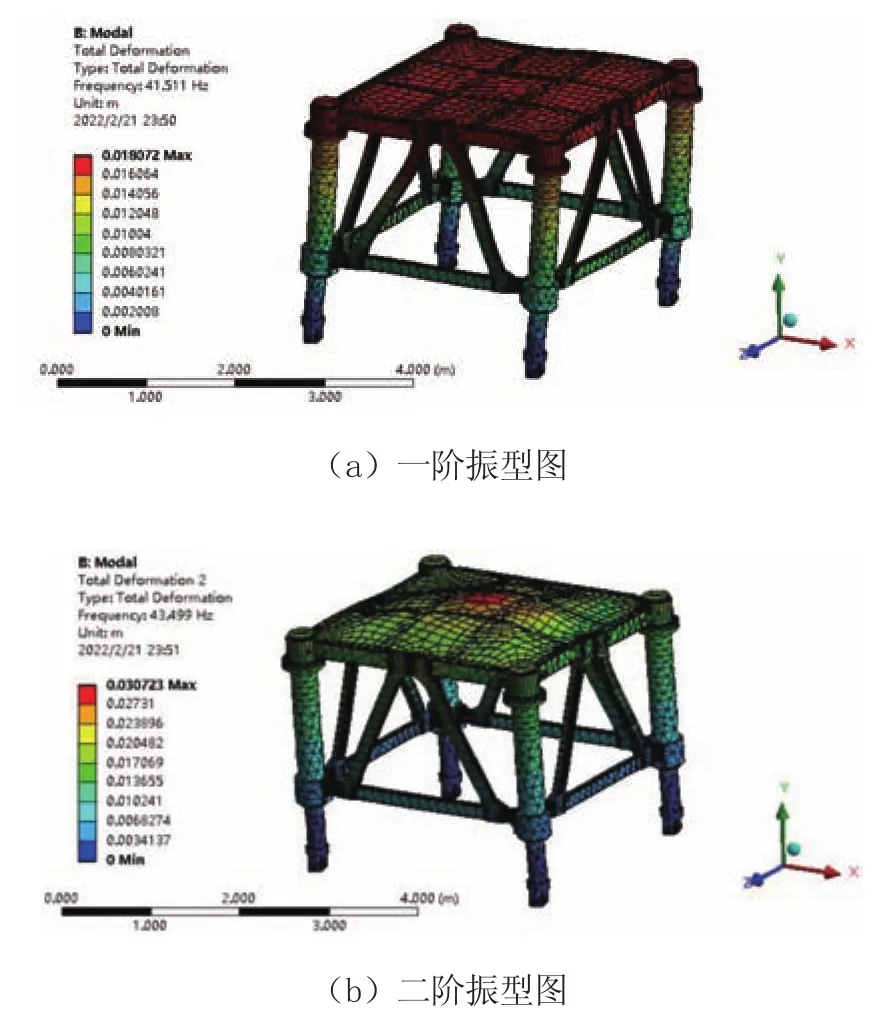
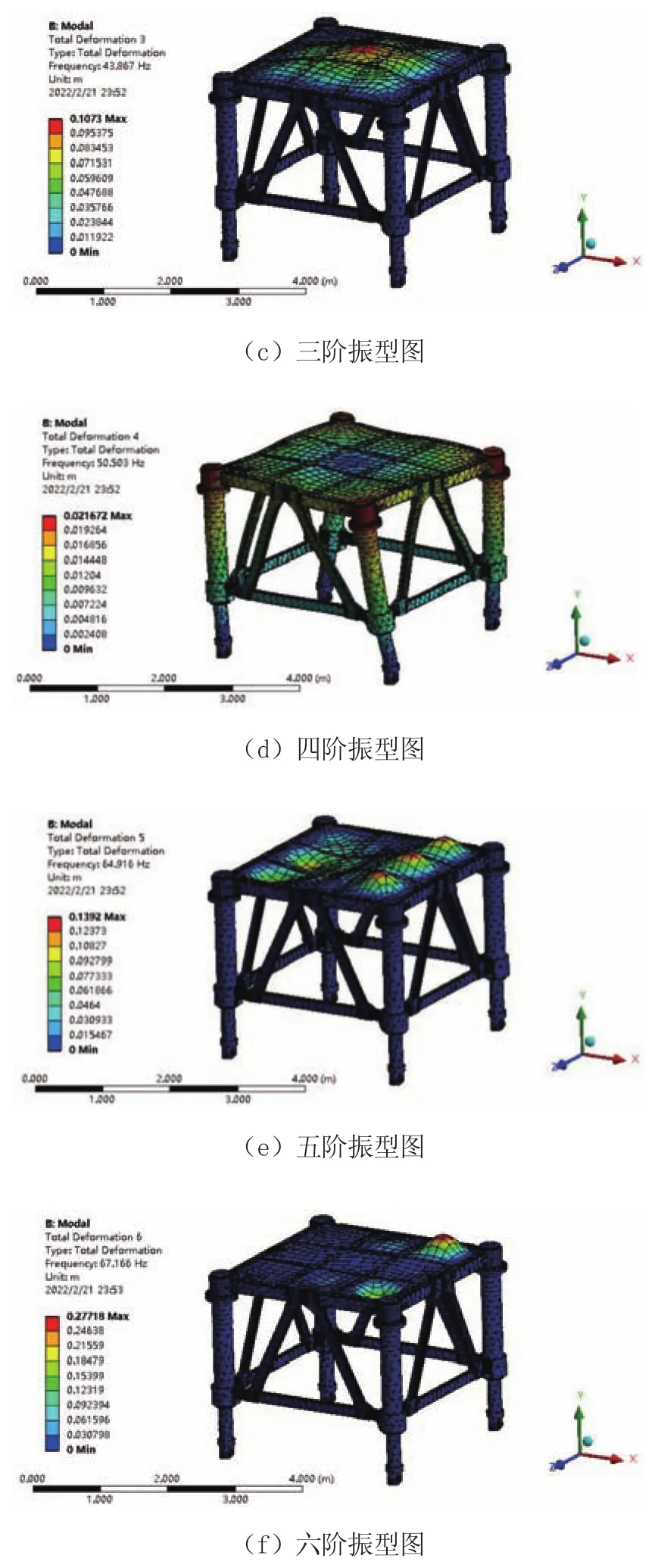
圖7 淺海移動平臺主體結構前六階振型圖
由模態分析結果可知,淺海移動平臺主體結構固有頻率不高,前六階固有頻率較為集中在41.511~67.166 Hz。由振動理論可知,為避免與平臺主體結構發生共振,液壓站原動機振動頻率與平臺固有頻率的比值應小于0.75或大于1.414[9],即小于31.133 Hz或大于94.987 Hz。由振型分析結果可知,淺海移動平臺主體機械結構中的作業平板結構沿不同方向出現扭動和擺動的現象,故需要在平板與桿件型材之間添加筋板結構以提高二者之間的連接剛度。
4 結論
本文以淺海移動平臺主體機械結構為研究對象,采用虛擬樣機技術在SolidWorks中建立了施工平臺主體結構的三維實體模型。結合懸掛支腿受力特性分析,在SolidWorks/Simulation環境中對懸掛支腿進行機械結構靜力學分析,得到了懸掛支腿在極限工況下的應力分布和形變分布,經分析懸掛支腿結構符合設計要求。結合實際需求,在Ansys Workbench環境中對淺海移動平臺主體機械結構進行模態分析,得到了平臺主體結構的前六階振動頻率和振型,為液壓油原動機的選型和局部結構的加強方案提供了參考依據。
猜你喜歡
南大法學(2021年3期)2021-08-13 09:22:32
當代工人(2020年8期)2020-05-25 09:07:38
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
自然與文化遺產研究(2016年2期)2016-05-17 05:53:59
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
山西大同大學學報(社會科學版)(2015年6期)2015-01-22 07:22:22
計算物理(2014年2期)2014-03-11 17:01:39
