LSTM-BP長短時記憶模型的設備壽命預測
2022-09-20 02:57:16薛纏明趙翔宇
現代計算機 2022年14期
薛纏明,趙翔宇
(太原衛星發射中心,太原 036301)
0 引言
當前形勢下,設備復雜度、集成度越來越高,而整系統維護檢修頻率越來越低,有效的設備狀態監測手段作用日益凸顯。通過設備分系統信號數據的日常記錄,挖掘設備器件損耗規律,實現設備的及時性維護維修,避免出現累積性設備故障顯得十分重要。
隨著支持向量機、BP網絡、卷積神經網絡等技術的發展,越來越多自適應數據驅動建模方法用于機電設備故障診斷與壽命預測過程。基于數據驅動的方法主要分為統計分析和機器學習兩大類,統計學方法通過利用統計模型或隨機過程模型描述設備性能退化,通過統計參數變化規律進一步分析設備問題,歸結得出設備健康階段。而機器學習的方法具有自適應性能好,無需過多地關注建模過程,利用原始監測記錄數據即可實現設備的健康狀態評估。循環神經網絡作為機器學習中深度學習模型較為成功的方法之一,廣泛應用于時間序列預測與回歸過程中,在信息處理、時間序列建模、設備壽命預測等領域起到了很好的效果。
循環神經網絡(RNN)的主體思想通過數據的隱藏層循環,實現序列演進方向的遞歸且所有節點按鏈式傳播,結構如圖1所示。
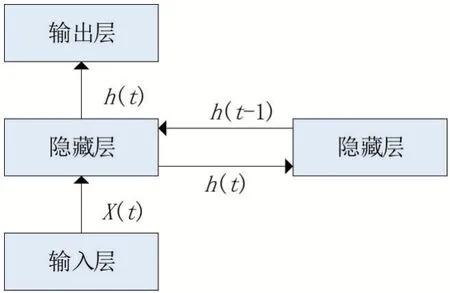
圖1 循環神經網絡記憶單元
其具體計算過程為
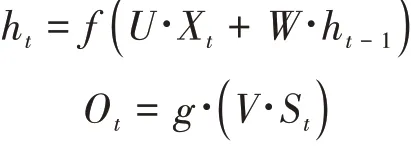
從結構和計算公式可看出,輸出結果與輸入和隱藏層狀態有關,通過串聯式的記憶單元,實現了時間序列的前后關聯。
1 基本理論
1.1 LSTM網絡
LSTM網絡是一種用于序列預測的優化型循環神經網絡模型,除了RNN中的隱藏層加入機制,同時設置了門控機制,控制前期數據的累計作用,從而實現長短記憶的作用,具體結構如圖2所示,主要分為三個控制門:輸入門、遺忘門、輸出門,對信息進行調節。
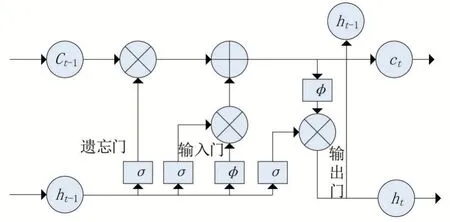
圖2 LSTM結構
1.1.1 輸入門
輸入門的目的在于控制時刻,輸入X及短期記憶狀態h經門限后保留在長期狀態c的信息成分。
式中為Sigmoid函數,為Tanh函數。
1.1.2 遺忘門
控制時刻,先前長期狀態c保留在當前長期狀態c的信息成分。

1.1.3 輸出門
控制時刻,長期狀態c輸出o后,保留在短期狀態下的信息成分。

1.2 BP網絡
BP網絡仍是目前神經網絡領域的基礎結構,據統計80%以上的神經網絡算法采用了BP網絡構型變體。結構由輸入層、隱藏層、輸出層構成,層之間采用全連接方式,層內無連接,通過反向傳播實現模型的參數矩陣迭代,基本單元輸入層通過與權重的乘法、與參數的加法實現傳統的線性模型,增加非線性激活函數,實現線性表達轉化為非線性形式,實現更豐富的表達能力。
1.2.1 基本結構
模型的基本結構如圖3所示。
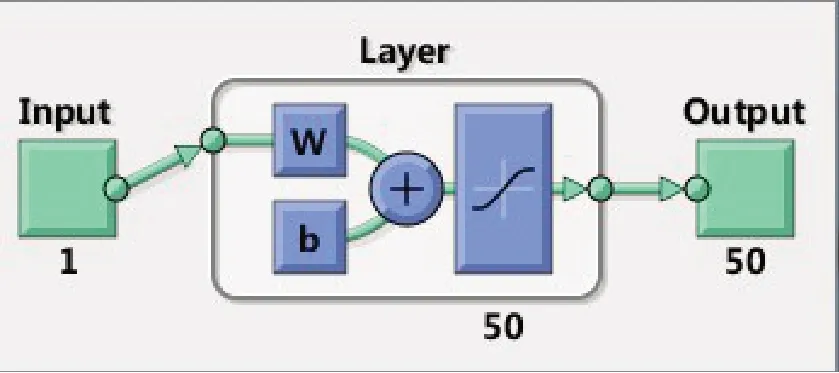
圖3 隱藏層50個神經元的BP結構
其基本的單元公式為
式中為激活函數,為隱藏神經元個數。
1.2.2 反向傳播
反向傳播作為網絡模型訓練的基本過程,起到了核心的作用,如何進行有效的反向迭代,根據預測值與實際值的偏差量,最終改變參數矩陣,達到二者更好的契合十分重要。反向傳播的核心問題是解決度量誤差,傳統采用均方誤差項,利用預測值與實際值的均方差度量二者的距離,公式為

而反向傳播采用梯度下降方式,對每個權重值做偏導,乘以學習率得到迭代項。
1.3 LSTM-BP模型
本文的主要模型采用LSTM-BP串聯模型改進單個LSTM模型參數量小,泛化性能相對較差的問題,其結構如圖4所示。
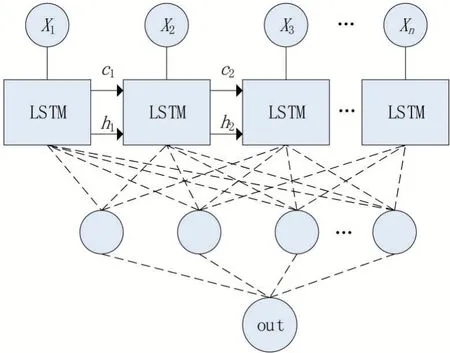
圖4 串聯LSTM-BP模型
2 實例數據驗證
為驗證模型,采用目前公開使用的設備壽命數據集,NASA公開的航空發動機數據集進行驗證。數據集采集了航空發動機不同運行條件下和故障模式下的4組監測數據,監測傳感器21個,分別監測風扇壓力比、風流量、燃料流量等狀態,通過全周期的數據采集,得到數據樣本,截取部分樣本情況如表1所示。
從表1可得,數據傳感器樣本間差異較大,需要進行統一歸一化運算,通過最大最小值比例歸一化后數據情況如表2所示。

表1 發動機原始數據

表2 發動機歸一化數據
通過歸一化處理后能夠明顯地發現樣本中存在不變量的問題,有6個傳感器數據為恒定值,去除相應指標,采用15個傳感器數據,train_FD001為訓練數據,test_FD001為驗證數據,對模型進行訓練和驗證。
損失誤差情況如圖5所示。
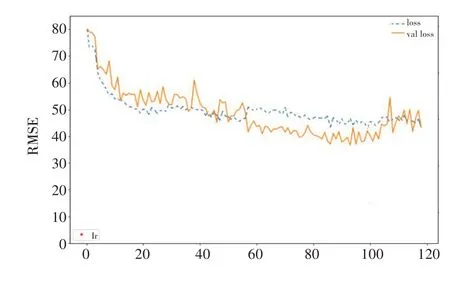
圖5 損失誤差情況
驗證集中取3段值模型預測情況如圖6所示。
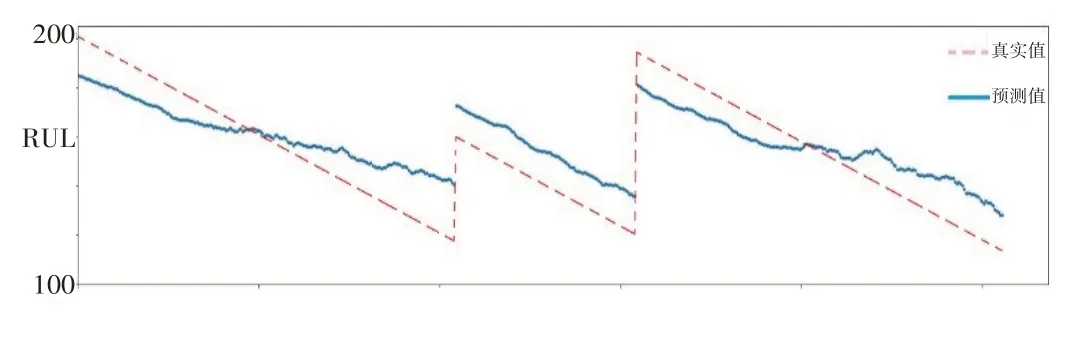
圖6 模型驗證集預測情況
從數據驗證情況看,模型在任取的段內,根據輸入樣本能夠較好地預測實際情況,趨勢和差值較小,模型取得了較好的效果。
3 結語
本文通過構建LSTM-BP串聯型結構,實現了預測模型方法,改進了傳統LSTM預測過程中參數矩陣規模小的問題,同時在航空發動機壽命預測數據上進行了實驗分析,改進的LSTMBP串聯模型能夠通過采集原始的傳感器數據對設備壽命進行較好的預測。后續在航空航天領域從設備長時間使用,維護周期長的角度出發,采用本模型對設備的健康狀態進行預測,以保證設備運轉正常。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中國特種設備安全(2022年6期)2022-09-20 02:52:28
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年11期)2018-08-04 03:26:08
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
光學精密工程(2016年6期)2016-11-07 09:07:19
工業設計(2016年12期)2016-04-16 02:52:00