磁流變測量系統的控制滯后與動態響應
2022-09-20 03:57:58呂靖成危銀濤鄔明宇何俊祥梁冠群
中國機械工程 2022年17期
關鍵詞:磁場
呂靖成 危銀濤 鄔明宇 何俊祥 梁冠群 尹 航
清華大學車輛與運載學院,北京,100084
0 引言
磁流變液(magnetorheological fluid,MRF)由RABINOW[1]于1948年發現,是一種黏度可受外加磁場調控的智能材料。因具有響應快和黏度變化大等優異性能,MRF成為連接機械系統和電控系統的優質材料。目前發展出的應用如下:力矩傳遞[1-3]、抑制振動[4-5]、形成壓力降[6]、密封[7]和拋光[8]等。將MRF及其所連接的機械系統和電控系統的集合體稱為磁流變系統(magnetorheological system,MRS)。
高性能的磁流變系統不僅需要可調力值范圍大[9],還需要擁有優良的控制策略[10],即要在恰當時機給設備合適的激勵。然而,該機械電子系統中的控制信號經電路產生電流,再經磁路產生磁場,最后磁流變液響應,其中每個環節都有一定的滯后,并最終導致控制時機的偏差。YOON等[11]與QIN等[12]的研究都表明,時間滯后對較高頻率下的控制效果有著極大的影響。故而,系統時滯的減少與系統動態響應特性的良好建模對磁流變減振器系統十分重要。
由于磁流變系統滯后特性研究的多學科交叉特性以及該系統的非線性特性使得建模研究困難,因此目前此類研究還未受到學術界的廣泛關注。同時,對MRS動態特性的研究也多集中于單純的機械系統受外界激勵的響應[13]。MRS受控制信號激勵響應特性的實驗研究主要通過施加階躍激勵觀察響應的滯后情況并對其進行簡單分析,且未將各部分的滯后響應行為分離研究[14-15],而對該特性的理論研究也多缺乏實驗結果的支持[16]。
對MRS各部分進行分析,可知其受控制信號激勵時的響應滯后。在電路中,由于感抗的存在,電流的相位會滯后于電壓。在磁路中,也存在類似的磁滯效應,表現為磁滯損失和渦流損失。根據磁路轉化原理以及電磁感應定律,磁流變設備的磁路可轉化為L-R等效電路,并可與電路串聯進行分析和測量。而在動態磁場條件下,可逆磁導率隨磁場強度變化[17],該蝶形滯回曲線同樣可以視為某種形式的滯后,且與頻率和偏置等諸多因素相關[18]。磁流變液通常被認為在外加磁場條件下性質可逆且瞬間發生改變,然而事實上它也會在剪切應變和外加磁場的激勵下出現滯后[15]。這部分滯后的出現主要是因為磁流變液中的磁性顆粒在時變的外加磁場條件作用下的聚集和解離需要時間。
總而言之,了解MRS受控制信號激勵的動態響應特性對提高其性能很重要,但目前學界對此的認識和研究都相對欠缺,考察內容也不夠全面,忽略了很多潛在的重要特性,與無級控制的MRS實際工況相去甚遠。因此,本文提出一套用于研究MRS動態特性的測試系統,并對系統隨偏置、振幅和頻率變化的動態行為進行研究。在MRS設備的實際應用中,電路中的電流仍能夠通過回采獲得,但卻不會再對磁感應強度和MRF特性進行測量,因此本文主要針對電流和剪切應力間的重要環節(即磁場滯后和MRF滯后)進行更加細致的分析與仿真。
1 系統滯后分析
1.1 理論模型
如前所述,磁路中存在磁滯效應,表現為磁滯損失和渦流損失。在不考慮B-H曲線動態響應的情況下,圓筒磁芯的渦流損失為[16]
(1)
令通過磁芯的磁通量
φ(t)=AB(t)=A(Bmsin(ωt)+B0)
得
(2)
式中,ρ為電阻率;R為外徑;r為內徑;h為高度;A為面積;Bm為磁感應強度交流部分的幅值;B0為磁感應強度的偏置部分;f為激勵磁場的頻率;ω為激勵磁場的角頻率,與激勵電流的角頻率相同。
由此可知,磁芯的渦流損失與磁芯材料的電阻率成反比,與磁芯高度成正比,與交流磁場幅值的平方成正比,與交流磁場頻率的平方成正比,還與磁芯結構有關。
磁路的磁滯損失(圖1)則與磁芯材料、磁感應強度波動的幅值、磁場頻率和磁芯體積有關,常用的簡化公式[19]為

圖1 可逆磁導率隨直流磁場變化曲線Fig.1 The change curve of reversible permeability with magnetic field

(3)
式中,ka為與磁芯材料特性有關的系數,磁滯回路的面積越小,ka越小;V為鐵芯的體積;α為控制系數,由Bm確定,Bm<1.0 T時,α=1.6。
圖1中,μrev為可逆磁導率,μi為起始磁導率,μr為剩磁磁導率。
由于電磁感應,故磁路滯后與由電感導致的電路滯后相互關聯。根據磁路轉化原理,MRS的磁路可轉化為L-R等效電路,將其與系統電路串聯,如圖2所示。等效電路部分的響應表達式為

圖2 磁流變測試設備簡化視圖Fig.2 Illustration of the magnetorheological system

(4)
式中,LW為線圈電感;RW為電路電阻;LM為磁芯的等效電感;RM為磁芯的等效電阻;U0(t) 為電源電壓;i(t)為電路中的電流。
在簡化條件下,RW和LM可以認為是常數[20],RM和LW則為
(5)
(6)
式中,N為線圈匝數;K為磁芯的結構參數。
由于式(5)和式(6)中含有電流項,使得式(4)成為一階非線性的微分方程,無法得到解析解,故將式(5)和式(6)中的電流項用有效值代替,RM和LW變為常數項,將式(4)簡化為一階線性微分方程,其解為
(7)
電路中的電流i(t)可以通過電流表回采至計算機中,磁芯中的磁場強度隨繞組中的電流同步變化,即
(8)
式中,l為磁路的長度。
在忽略漏磁的情況下,磁芯中的磁感應強度應與磁流變液中的一致,其值為
B(t)=μ0μr(t)H(t)
(9)
式中,μ0為真空磁導率,μ0=4π×10-7H/m;μr(t)為相對磁導率,其值會隨磁場強度偏置和振幅以及交變頻率變化而變化[18],產生磁場滯后。
1.2 實驗
綜上所述,系統滯后的主要組成部分有:等效電路滯后(電源U0(t)與電流i(t)間)、磁場滯后(磁場強度H(t)與磁感應強度B(t)間)和磁流變液滯后(圖3,磁感應強度B(t)與剪切應力τ(t)間),本文不考慮剪切應變γ(t)和剪切應力τ(t)間的滯后。
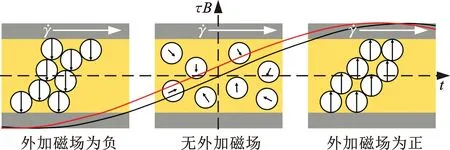
圖3 磁流變液的交變響應Fig.3 Response of magnetorheological fluid to alternating magnetic field
針對上述情況,本文提出了系統滯后的測量方案(圖2)。電源信號由程序控制,近似認為不存在滯后;電路中的電流可以通過電流計回采得到;磁感應強度可由置于測試平臺底座的高斯計測得;而屈服應力可由流變儀測得。如此,便可分別對系統滯后的各部分特性進行研究。
本文使用安東帕的MCR702流變儀進行研究,使用查表法生成直流加交流的電流,固定剪切速率進行測試(設定每次測試的循環次數為10)。在正式測試前,設置模塊在偏置電流和固定的剪切速率下進行預剪切,保證正式測試中不會因為電流和剪切速率的突變而引入滯后或擾動。磁流變液由體積占比為30%的巴斯夫CIP SQ球形鐵粉(D50為3.9~5.0 μm)和基載液混合制得。
2 實驗結果與分析
首先,對通常的電流測試范圍進行準靜態的掃描測試,獲得τ-I的循環測試曲線,如圖5所示,并將該曲線作為后續動態測試分析的基礎。在準靜態測試中,電流與電感強度一一對應。不難發現該循環測試曲線中僅在中等電流大小時存在極小的滯回區,且在0 A和±5 A處收斂為點。
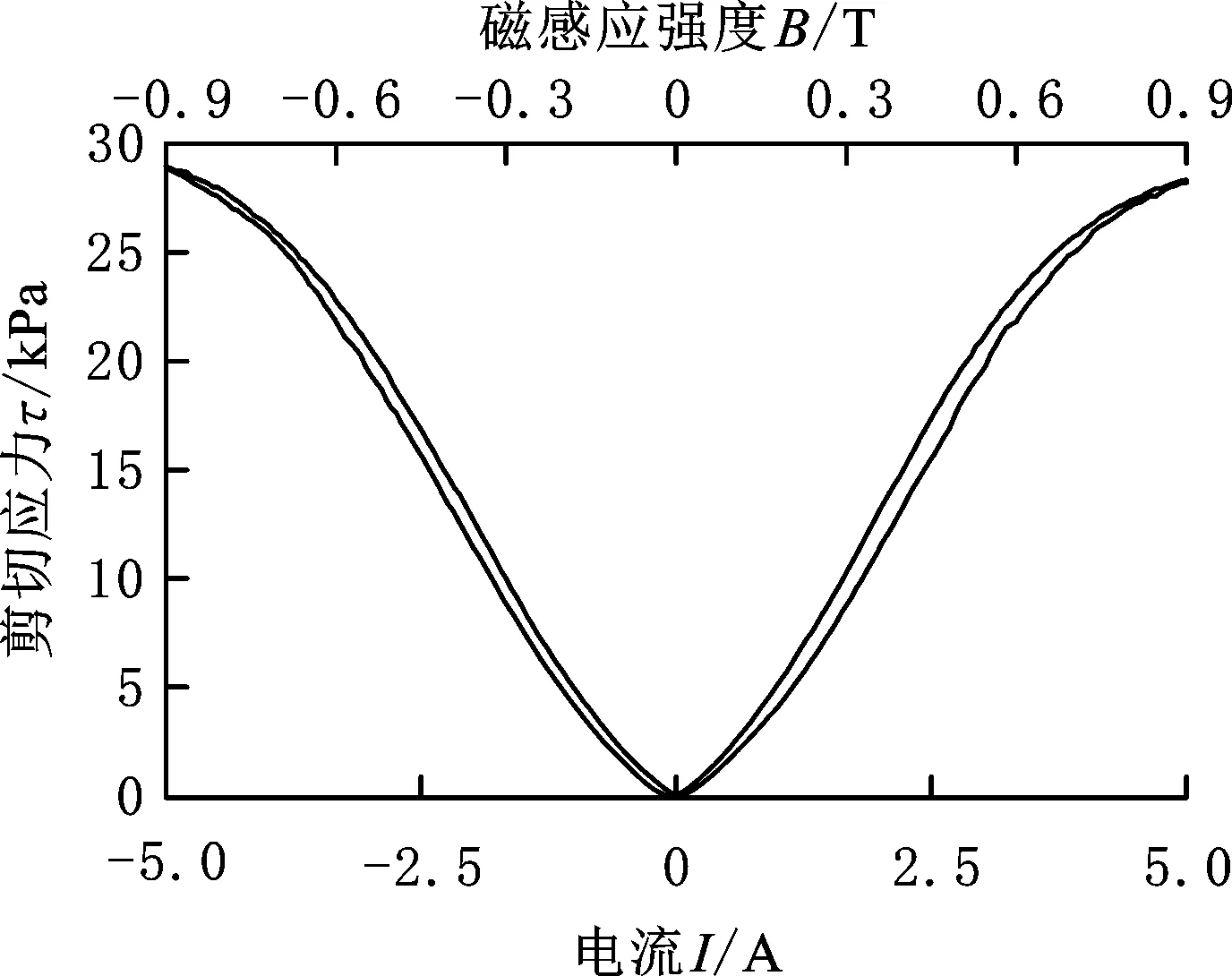
圖4 磁流變設備的靜態響應Fig.4 Static response of the magnetorheological system
(a)無偏置

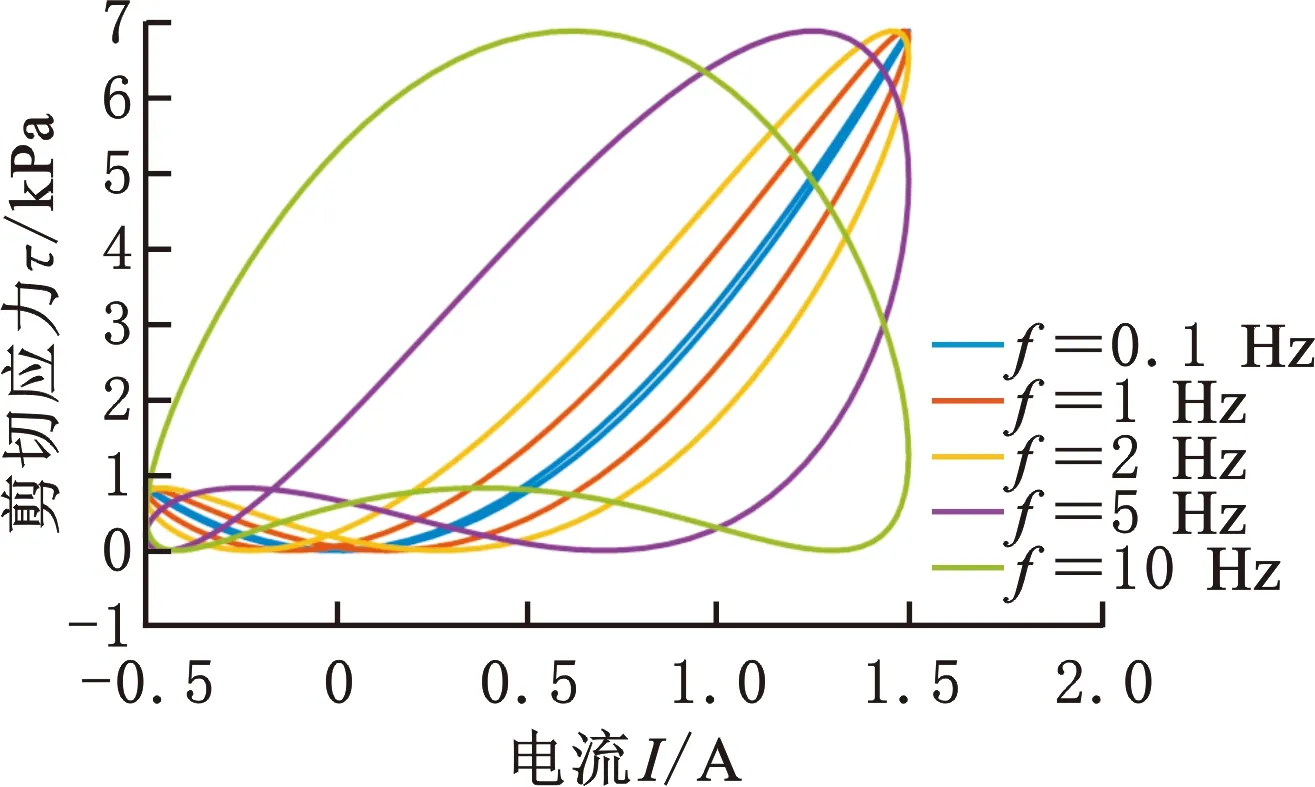
(b)2A偏置圖5 磁流變設備的動態響應Fig.5 Dynamic response of the magnetorheological system
設定0 A處的剪切應力為零,對該曲線分別進行線性和非線性擬合,可得
τ=35739Bsgn(B)
(10)
τ=2.756×104sin2(1.987B)
(11)
在無偏置和2 A偏置條件下,進行變頻(0.1,1,10 Hz)和變振幅(0.5,1 A)的實驗,并繪制其τ-I曲線,如圖5所示(共10次循環)。由圖5不難發現振幅的變化主要影響τ-I曲線的尺寸,而激勵頻率則會顯著改變曲線的形狀。由圖5a知,0.1 Hz下曲線就出現分叉,即存在兩個極小值點;而隨著激勵頻率增至1 Hz,曲線的滯后環面積增大,兩個極小值點進一步遠離0 A;而當頻率為10 Hz時,曲線突然變為開口向下的拋物線形狀,并出現了電流增大、磁流變液剪切應力值反而下降的奇怪現象。由圖5b知,低頻激勵的I-τ曲線滯回較小,而隨激勵頻率增加,滯后環的面積也逐漸增大。
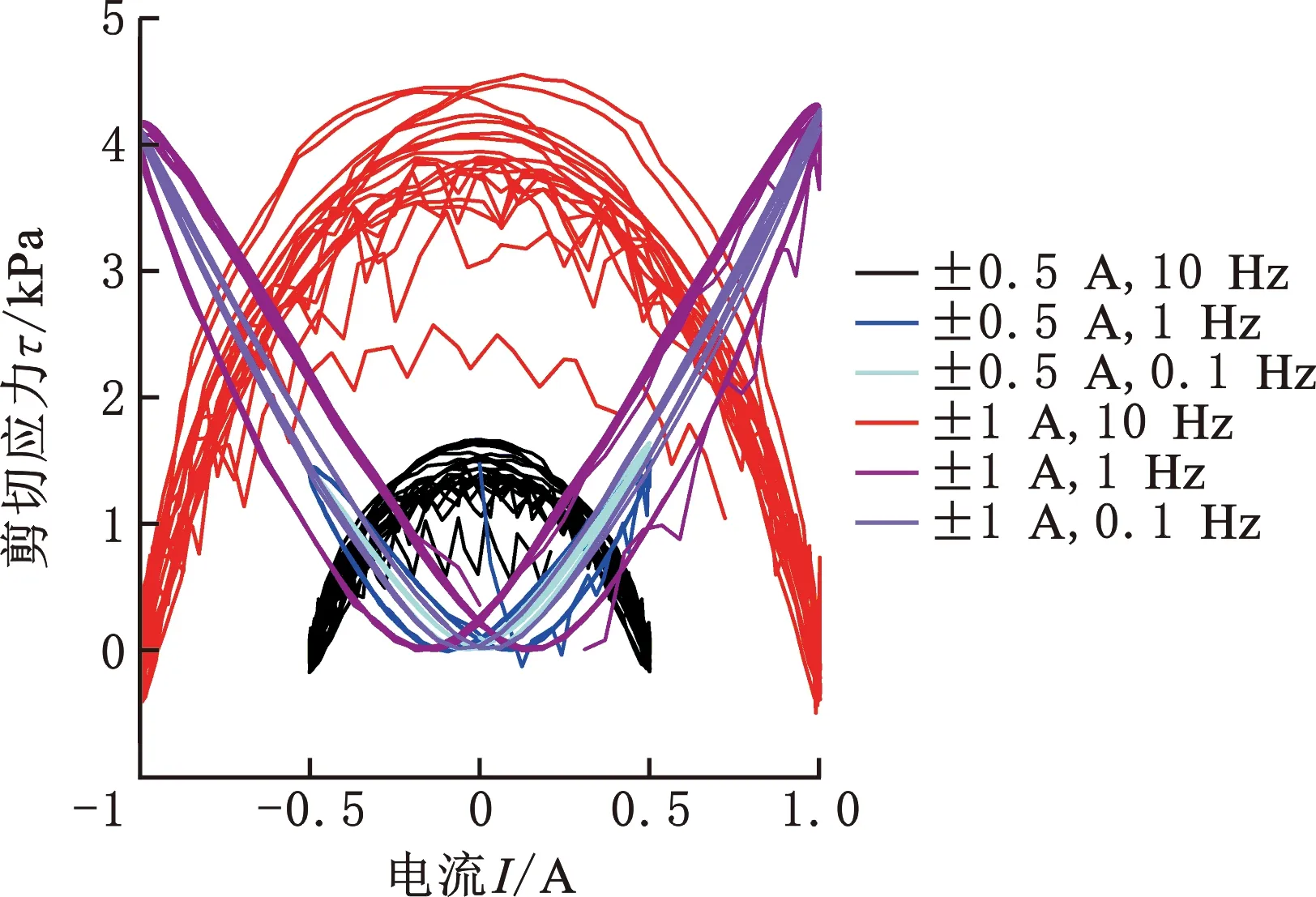
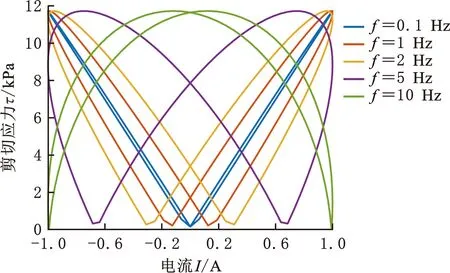
針對無偏置條件測得τ-I曲線的異常現象,固定振幅為1 A,進一步細化激勵頻率,結果如圖6所示(10次循環)。出現非常明顯的蝶形曲線,在0 A處兩側曲線相交于一點,且該點的縱坐標隨頻率逐漸增大;蝶形曲線的下沿,即兩個極小值點,則逐漸向兩側移動,并在10 Hz時到達±1 A位置;滯回曲線的面積則隨著頻率的增加先增大后減小。此外,經數據分析知,該系統無法產生10 Hz以上的交流電,相關數據不可信,故在此略去。

圖6 無偏置的動態頻率響應Fig.6 Unbiased dynamic frequency response
推斷上述τ-I曲線隨激勵頻率發生變化主要源于遲滯現象,因此對其滯后相角進行分析。方法是利用傅里葉擬合I-t和τ-t曲線,形式如下:
i(t)=A′sin(ωt-φ0)+ibias
(12)
τ(t)=A″sin(ωt-φ0-φ)+τbias
(13)
式中,ibias、τbias分別為電流和剪切應力的偏置量;A′、A″分別為電流和剪切應力正弦部分的振幅;φ0為U0(t)與i(t)間的滯后相角;φ為i(t)與τ(t)間的滯后相角。
處理后即可得U0(t)與i(t)以及i(t)與τ(t)間滯后相角隨激勵頻率的變化曲線,如圖7所示(2 A偏置,0.5 A振幅)。不難發現,U0(t)與i(t)間的滯后相角隨激勵頻率的增大最初快速增大,而后變化速度逐漸變慢(圖7a)。
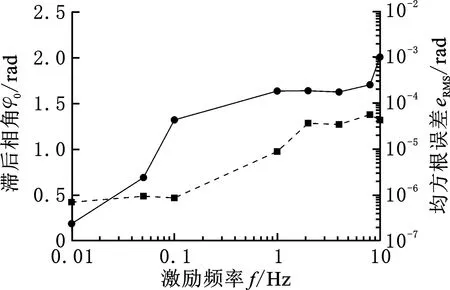
(a)U0(t)與i(t)間
由于電磁部分的動態響應特性并非本研究關注的核心,故對圖7a不做過多討論。HANS等[21]通過測量該子系統的動態響應得出其特征時長約為50 ms,即前文所述響應時間為150 ms。而i(t)與τ(t)間滯后相角則基本隨激勵頻率線性增加(圖7b),用過零點的線性方程擬合可得
φ=0.145 16f
(14)
若針對該現象引入此前所述的滯后時間概念(t1),則式(13)轉化為
τ(t)=A″sin(ω(t-t1)-φ0)+τbias
(15)
其中,ωt1=2πft1=φ,可得t1值為23.1 ms。而引入滯后時間概念的好處是當激勵頻率趨于零時,滯后相角也同時趨于零,相當于使體系有了響應速度的概念,當激勵的變化速度較慢時,系統響應基本跟上,幾乎沒有相角遲滯。若測量環節無滯后,則可知該系統磁場滯后與MRF滯后的總響應時長約為t1,即23.1 ms。
將該滯后時間t1分別代入式(10)和式(11)的線性與非線性模型進行仿真,繪制τ-I曲線,結果如圖8所示。圖8中仿真曲線隨頻率變化的趨勢基本符合圖6中的測試結果,說明測試結果的蝶形曲線主要由遲滯時間導致。比較圖8a、圖8b兩模型仿真結果可知,圖6中τ-I蝶形曲線平滑的上沿和下沿分別由滯后和非線性的τ-B關系所致。此外,對比圖6與圖8的剪切應力范圍可知,非線性模型將圖4中所示S形曲線描述得更準確,而線性模型在小電流情況下存在對剪切應力顯著高估的問題。
(a)線性模型

(b)非線性模型圖8 考慮滯后的仿真結果Fig.8 Simulation results considering hysteresis
對于有偏置電流的情況,還可以細分為偏置大于振幅和小于振幅的兩種情況,仿真和對比結果如圖9所示(共10次循環)。可以發現,對于兩種有偏置電流的情況,仿真結果均能夠較好地與測試結果匹配,證明了仿真模型的有效性。
滯回曲線的本質就是曲線中出現了一對多的情況,即同一橫坐標在曲線上有多個對應的縱坐標。仿真環節中B-I和τ-B均為一一對應關系,滯回曲線出現的主要原因就是滯后導致變量空間出現不對齊。再進一步就是由簡諧振動的拓撲性質決定,即除波峰與波谷處,一個周期內每個值都有兩個時間點與之對應。同一縱坐標的對應關系倍增原理也與之類似,本例中B-I為奇函數(B=0.1758I),而τ-B則為偶函數,故而分別出現橢圓滯后環和蝶形滯后環。

(a)2 A偏置,1 A振幅測試

(b)2 A偏置,1 A振幅仿真

(c)0.5 A偏置,1 A振幅測試
(d)0.5 A偏置,1 A振幅仿真圖9 考慮滯后的測試與仿真對照Fig.9 Comparison of tests and simulations considering hysteresis
此外,值得注意的是,蝶形曲線出現的原因是由于偶函數的翻折作用,故其兩側“翅膀”的滯后環面積并不完整。如圖10所示,蝶形曲線實際的總滯后環面積St=S1+S2+2S3。
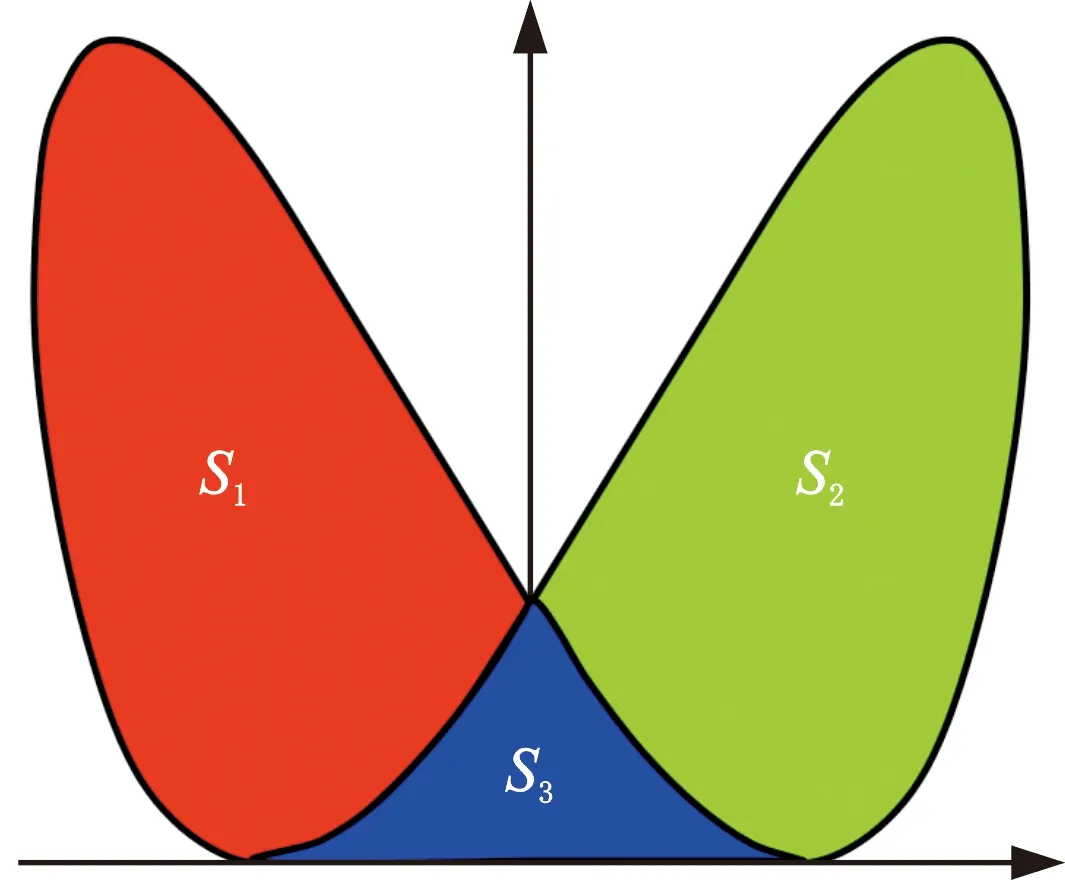
圖10 蝶形曲線滯后環示意圖Fig.10 Illustration of hysteretic loop with butterfly shape
3 結論
通過分析磁流變設備的各滯后環節,本文提出系統研究磁流變系統控制滯后及動態響應的方案,并主要就τ-I環節進行了測試與研究。由測試結果知,電流振幅主要影響滯回曲線的尺寸;偏置大小則影響曲線形狀,并在其小于振幅時出現蝶形曲線;頻率也通過滯后相角影響形狀,且滯后相角隨頻率線性增大。據此,本文引入滯后時間t1描述相關行為,即剪切應力值對應t1前的電流值,對于本測試系統該值為23.1 ms。含該滯后項的非線性模型仿真結果能較好地描述系統動態行為。通過與線性模型的比較和分析,該模型還解釋了蝶形滯后曲線的成因與特征。
綜上所述,本文的分析、測試與建模工作為磁流變設備未來的滯后和動態響應研究奠定了基礎。同時,若測量系統滯后可忽略,則可視該系統磁場滯后與MRF滯后的總響應時長約為t1,這為后續的系統優化提供了重要參數。后續研究將引入高斯計測量磁感應強度來分別獨立研究系統的磁場和磁流變液滯后。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23
