磁懸浮高速電機轉(zhuǎn)子低頻振動機理及補償方法
2022-09-20 03:58:04馬雪晴陳震民
中國機械工程 2022年17期
紀 歷 馬雪晴 陳震民
1.杭州電子科技大學(xué)信息工程學(xué)院,杭州,311305 2.浙江中源磁懸浮技術(shù)有限公司,杭州,310011
0 引言
磁懸浮高速電機(本文特指磁懸浮軸承支撐的高速電機)的定轉(zhuǎn)子之間無接觸、無摩擦,轉(zhuǎn)子轉(zhuǎn)速普遍在100 000 r/min以上,可直接與高速原動機或工作機相連,取消了原有的增速/減速機構(gòu),能夠大幅提高設(shè)備效率[1-3]。基于這一關(guān)鍵技術(shù)開發(fā)的磁懸浮鼓風(fēng)機、磁懸浮壓縮機等產(chǎn)品已經(jīng)逐漸成熟,并在工業(yè)應(yīng)用中取得了很好的節(jié)能效果。然而,在一些對可靠性要求較高的場合,由磁懸浮轉(zhuǎn)子振動超限而導(dǎo)致的停機成為了制約磁懸浮產(chǎn)品推廣的主要瓶頸。
針對這一問題,大量的研究工作著眼于解決由轉(zhuǎn)子不平衡質(zhì)量引發(fā)的同頻振動[4-8],如自平衡控制(最小力補償)[9-10]和不平衡補償(最小位移補償)[11-13]。然而,根據(jù)大量的實測數(shù)據(jù),在現(xiàn)場工況中磁懸浮轉(zhuǎn)子的振動情況非常復(fù)雜,并不僅限于同頻振動。一個較為常見的現(xiàn)象是,當(dāng)設(shè)備振動超限跳停時,除了同頻振動外,常伴隨與轉(zhuǎn)速無關(guān)的低頻(50 Hz以下)振動。
文獻[14]認為低頻振動由磁懸浮系統(tǒng)中的非線性引發(fā),認為非線性會使低頻增益下降,導(dǎo)致系統(tǒng)不穩(wěn)定。文獻[15]發(fā)明了一種諧振質(zhì)量阻尼器來抑制磁懸浮飛輪系統(tǒng)的低頻振動。文獻[16]提出利用干擾觀測器對轉(zhuǎn)子高速旋轉(zhuǎn)時的低頻振動進行觀測和抑制。
目前,有關(guān)磁懸浮轉(zhuǎn)子低頻振動的研究較少,并不能很明確地解釋其產(chǎn)生的機理。本文在已有研究基礎(chǔ)之上,分析了導(dǎo)致轉(zhuǎn)子低頻振動的外部激勵,結(jié)合磁懸浮系統(tǒng)的數(shù)學(xué)模型研究了該低頻振動產(chǎn)生的機理,并提出了基于擴展?fàn)顟B(tài)觀測器的振動補償策略及穩(wěn)定性判據(jù)方法。通過仿真與試驗對得出的結(jié)論進行了驗證,為磁懸浮技術(shù)在工業(yè)應(yīng)用中的進一步推廣提供了參考。
1 磁懸浮轉(zhuǎn)子低頻振動產(chǎn)生機理
1.1 磁懸浮系統(tǒng)的數(shù)學(xué)模型
本文以磁懸浮系統(tǒng)的數(shù)學(xué)模型為基礎(chǔ)進行研究。經(jīng)典的磁懸浮系統(tǒng)主要由控制器、功率放大器、磁懸浮軸承-轉(zhuǎn)子、位移傳感器四部分組成。其中,控制器是磁懸浮系統(tǒng)的核心,在工業(yè)應(yīng)用中最為成熟的是PID控制器,其數(shù)學(xué)模型如下:
(1)
式中,KP、KI、KD分別為比例、積分、微分系數(shù);Tf為不完全微分環(huán)節(jié)的時間常數(shù),用來濾除信號中的噪聲,避免微分環(huán)節(jié)過度放大系統(tǒng)中的噪聲。
磁懸浮功率放大器[17]放大控制信號,實現(xiàn)對勵磁電流的控制,該環(huán)節(jié)是典型的非線性設(shè)備,其工作過程會引入大量的高次諧波。但由于勵磁線圈及磁懸浮轉(zhuǎn)子系統(tǒng)本身具有較大慣性,高頻諧波電流對系統(tǒng)影響較小,因此在設(shè)計控制系統(tǒng)時通常將其簡化為一個線性的增益KA。
磁懸浮轉(zhuǎn)子是系統(tǒng)中的被控對象,可根據(jù)磁懸浮軸承-轉(zhuǎn)子的結(jié)構(gòu)推導(dǎo)出懸浮力與勵磁電流及轉(zhuǎn)子位移間的關(guān)系,從而得到其數(shù)學(xué)模型。由于電磁力的非線性及結(jié)構(gòu)上的耦合,磁懸浮轉(zhuǎn)子是一個高階的非線性系統(tǒng),但對于剛性轉(zhuǎn)子通常將其簡化為一個SISO的線性模型,如下:
(2)
式中,m為轉(zhuǎn)子單端的等效質(zhì)量;Ki為電流剛度;Kx為位移剛度。
轉(zhuǎn)子的振動量由傳感器檢測并轉(zhuǎn)換為電壓信號用于反饋控制,該環(huán)節(jié)用增益KS來表示,通常情況下傳感器及其檢測電路帶有低通濾波器,可以由一個串聯(lián)的一階慣性環(huán)節(jié)來描述。
磁懸浮轉(zhuǎn)子系統(tǒng)在工作時受到的外部激勵主要來自轉(zhuǎn)子的不平衡力,其形式表現(xiàn)為一個與轉(zhuǎn)子同步旋轉(zhuǎn)的力矢量:
(3)
式中,ep為轉(zhuǎn)子偏心距(質(zhì)心到形心的距離);Δd為形心到旋轉(zhuǎn)中心的距離,即動態(tài)偏心量;ωr為轉(zhuǎn)子角速度。
此外,系統(tǒng)工作時不可避免地受噪聲的影響,如數(shù)字系統(tǒng)A/D轉(zhuǎn)換中引入的白噪聲、功率放大器引入的開關(guān)噪聲以及位移傳感器調(diào)理電路引入的相關(guān)噪聲,這些噪聲將在微分控制器的作用下被放大,從而對系統(tǒng)造成不利的影響。為便于分析,本文將其統(tǒng)一等效為信號采樣處的白噪聲。
1.2 轉(zhuǎn)子低頻振動的仿真分析
在MATLAB中建立上述磁懸浮系統(tǒng)的數(shù)學(xué)模型,逐步加入激勵,得到的仿真結(jié)果如圖1所示。仿真主要參數(shù)如表1所示。
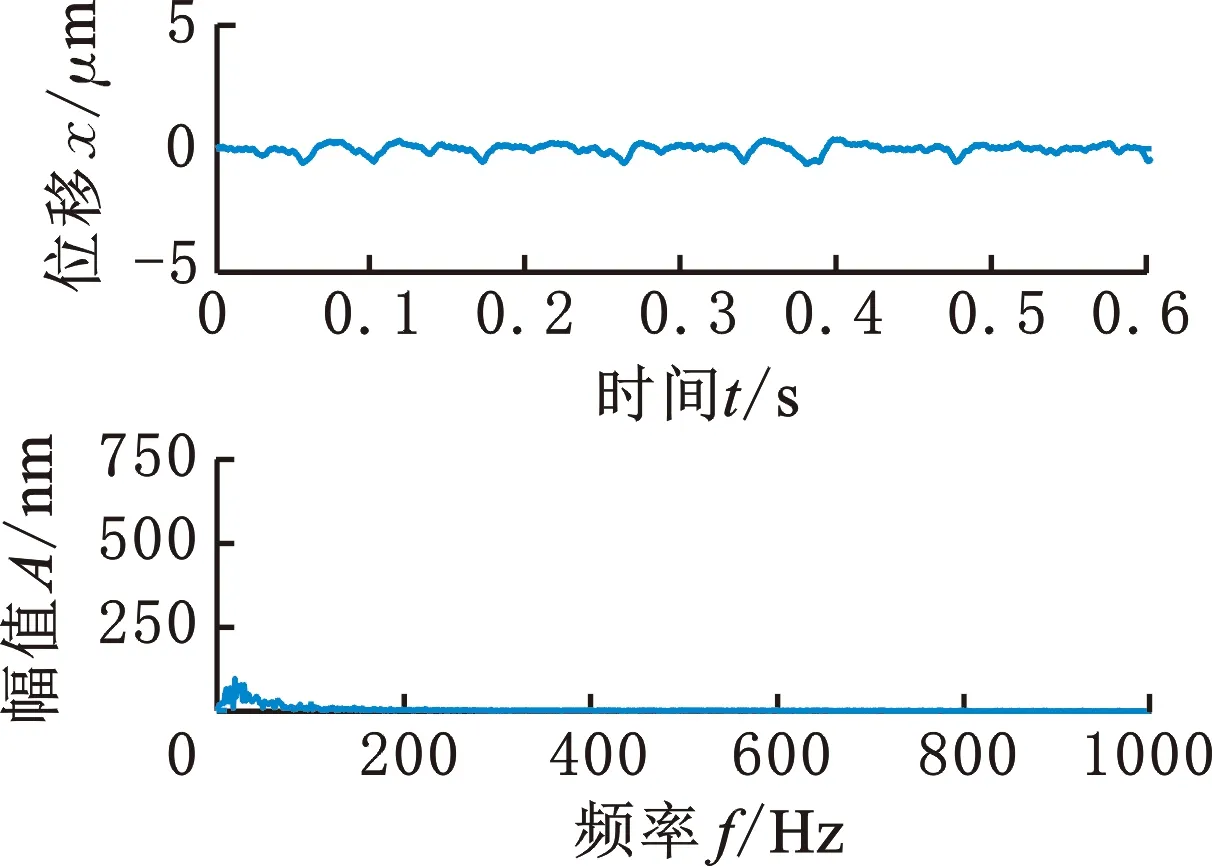
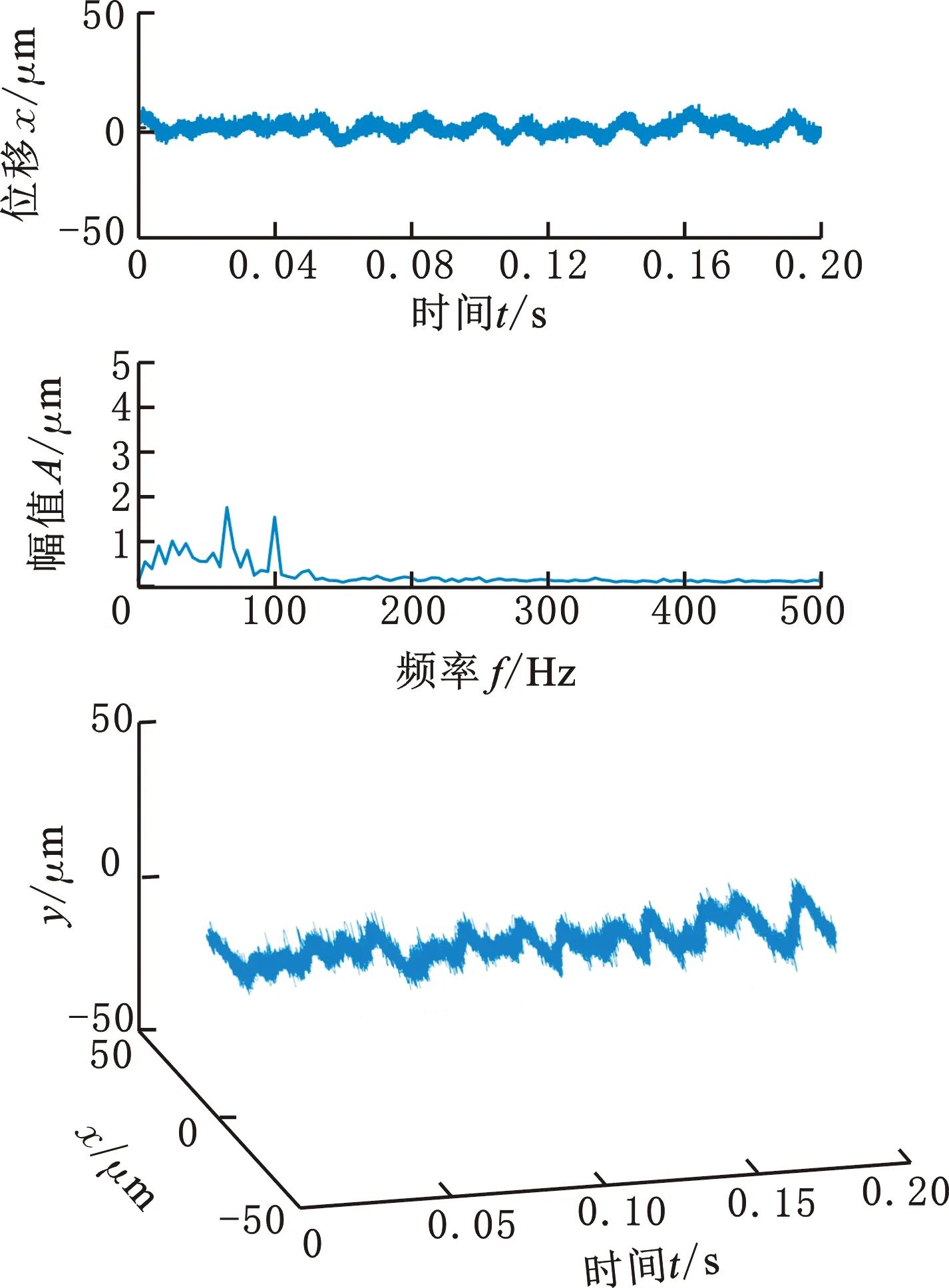
(a)無激勵
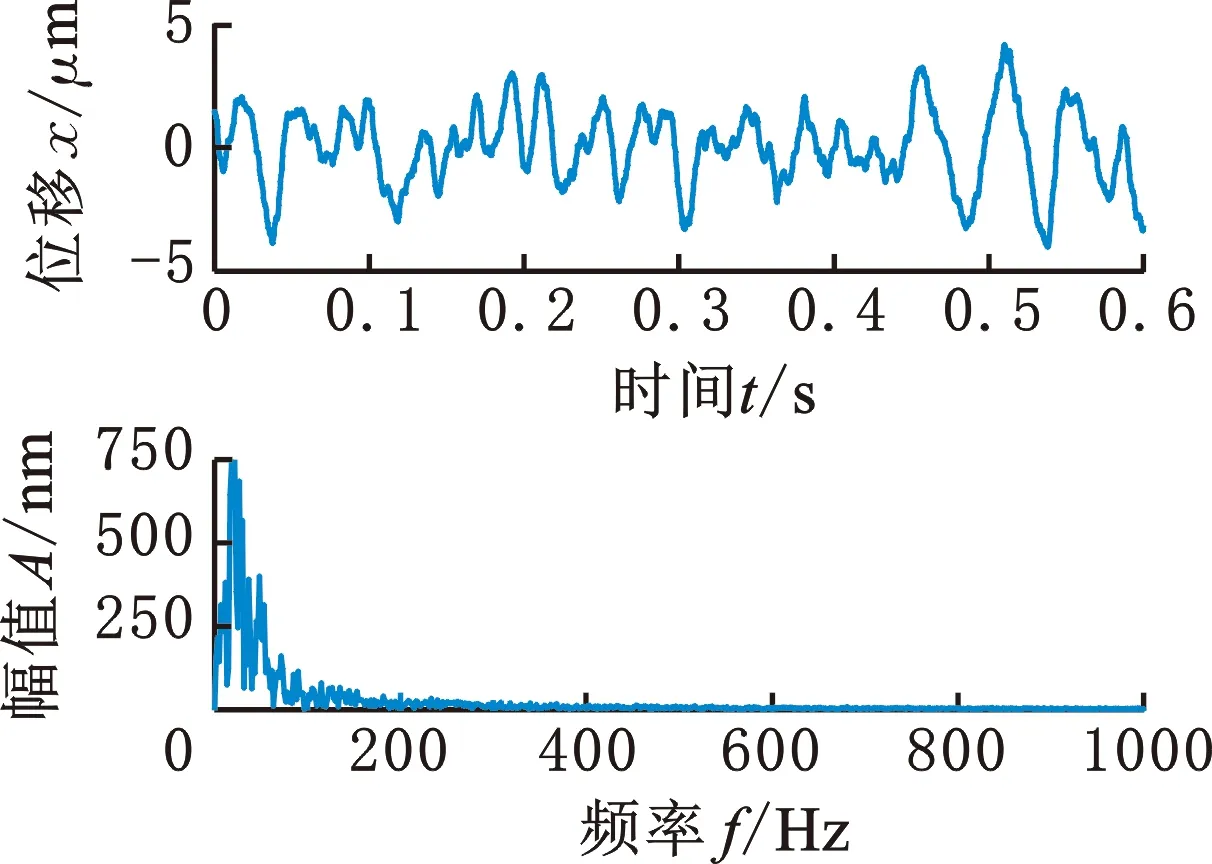
(b)施加高斯白噪聲
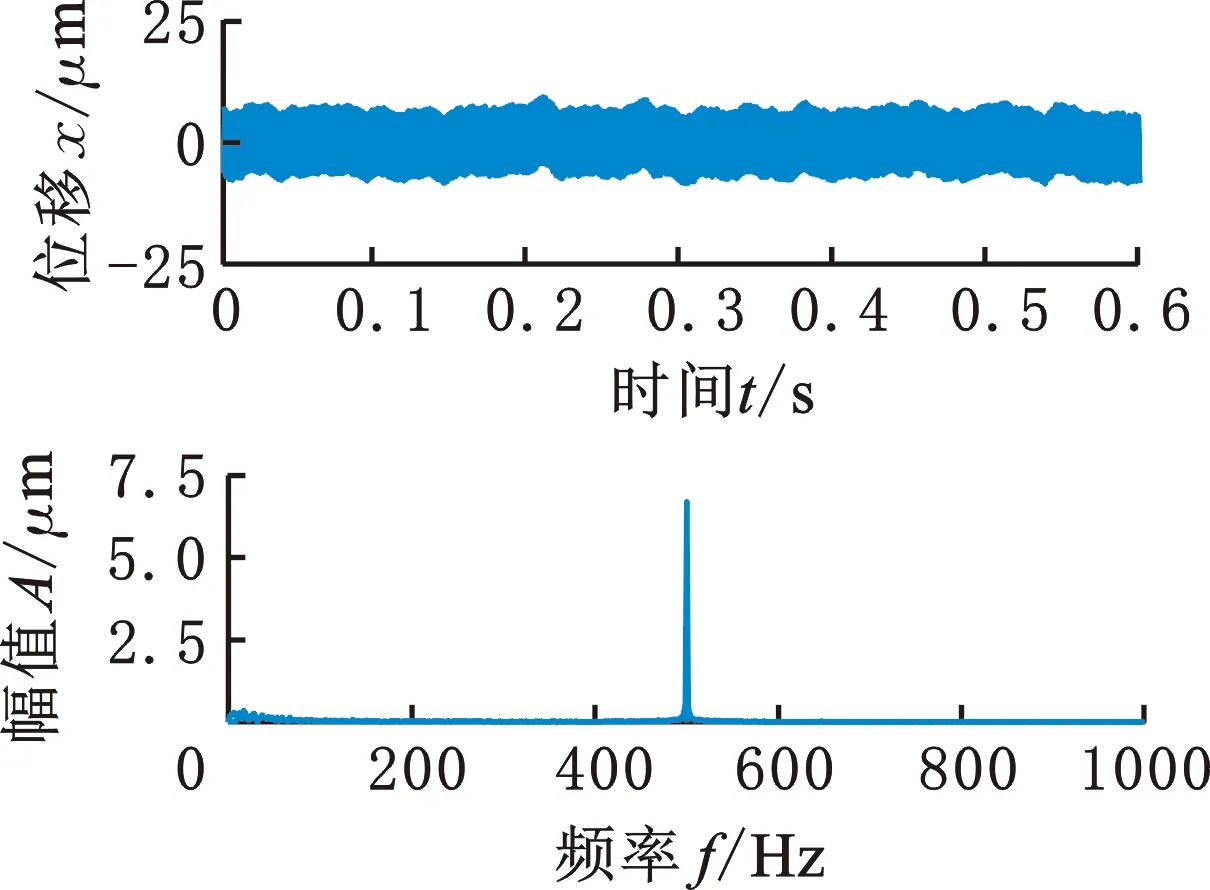
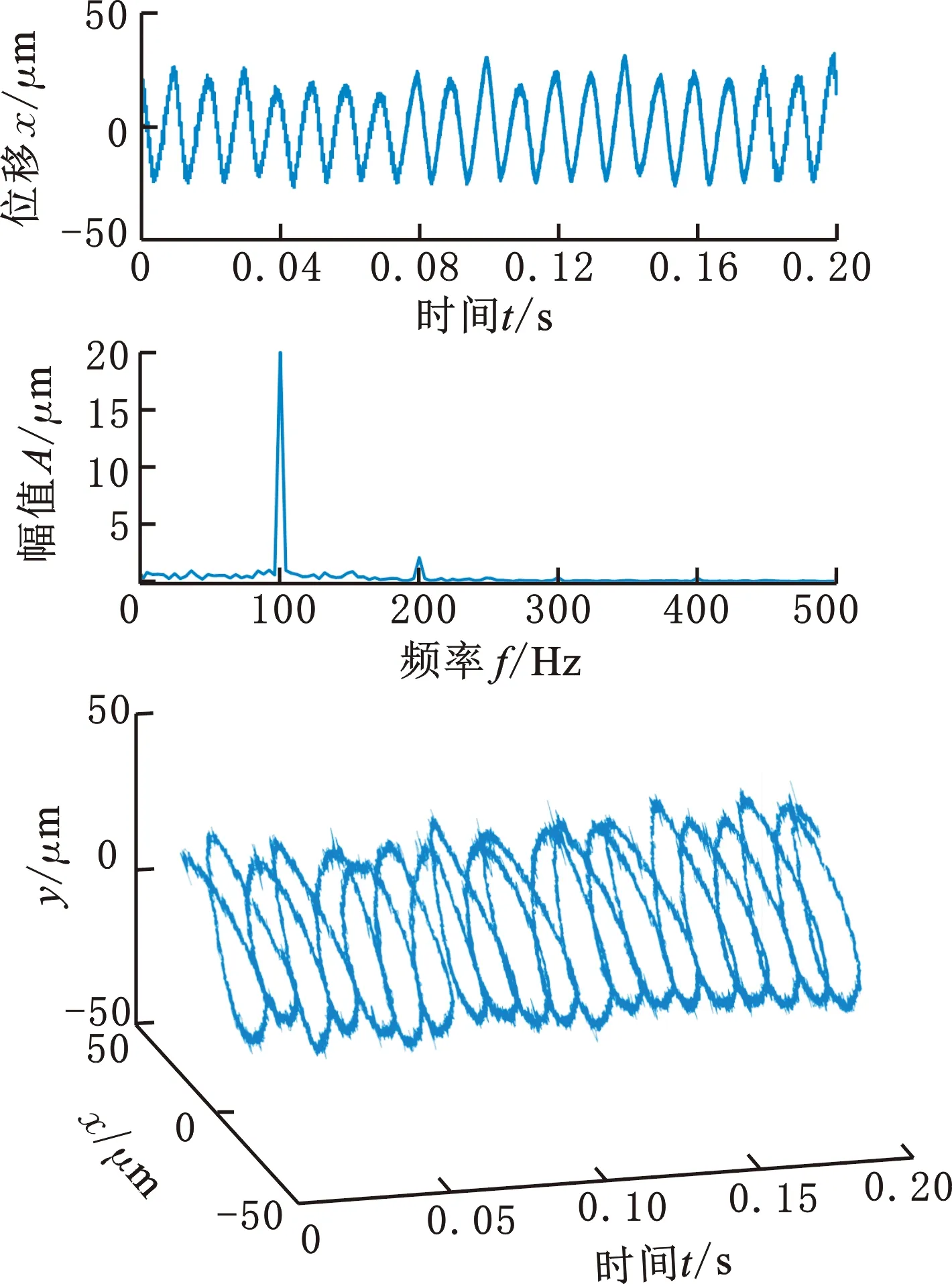
(c)施加不平衡力

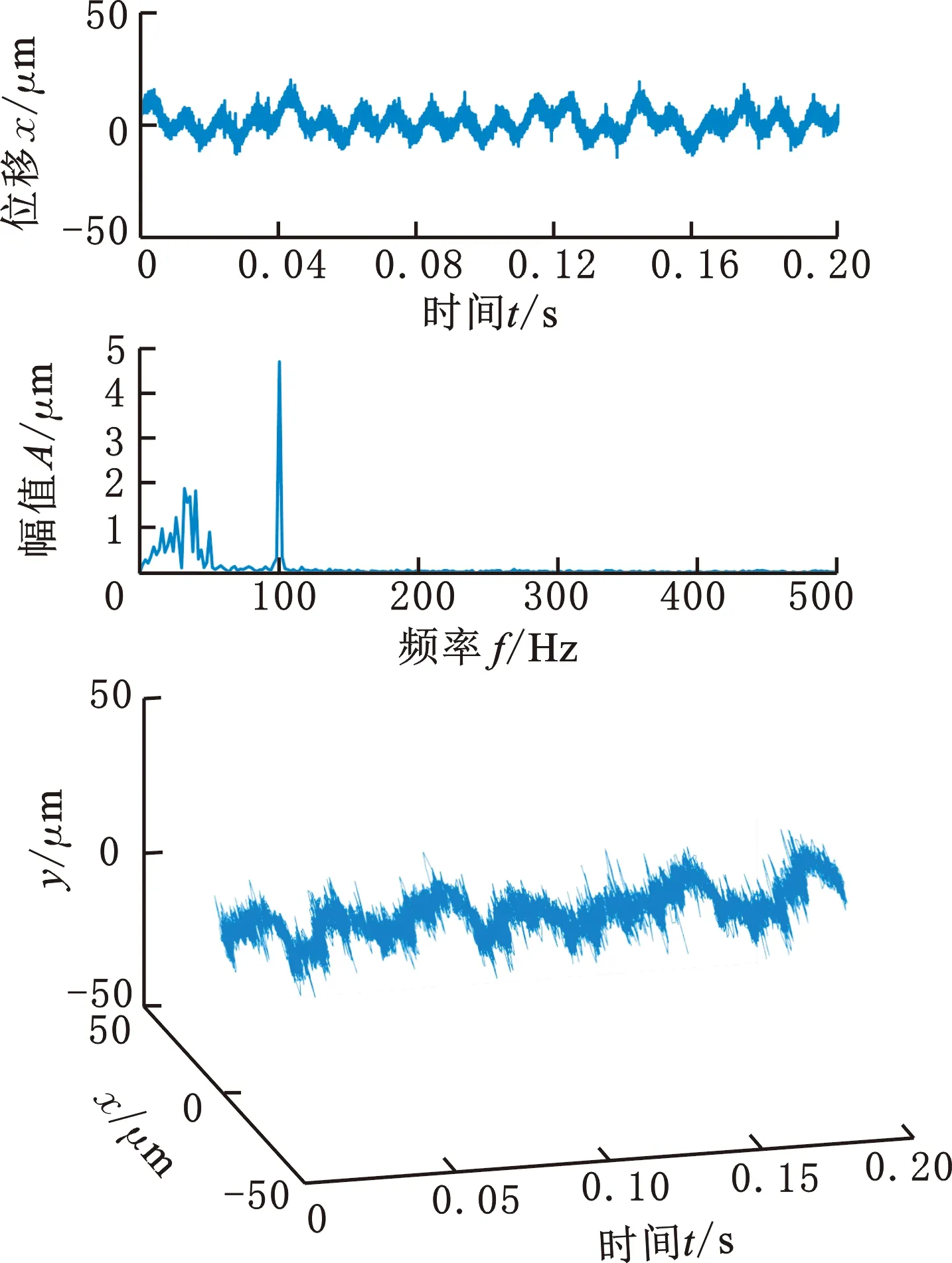
(d)施加高斯噪聲和不平衡力圖1 不同激勵下磁懸浮轉(zhuǎn)子的振動波形及頻譜特性Fig.1 Vibration waveforms and its spectrum for AMB based rotor with different noise excitation
表1 磁懸浮控制系統(tǒng)主要參數(shù)Tab.1 The key parameters of the AMB system
圖1a所示為無外部激勵作用時磁懸浮轉(zhuǎn)子穩(wěn)態(tài)懸浮的振動波形,此時轉(zhuǎn)子的振動信號極其微小,但仍可見微弱的低頻振動。在轉(zhuǎn)子位移信號采樣處加入PSD(能量譜密度)高度為0.03的高斯白噪聲,得到轉(zhuǎn)子振動波形如圖1b所示,可以看出,在白噪聲的激勵下,轉(zhuǎn)子產(chǎn)生了明顯的低頻振動,主要頻率成分集中在50 Hz以下,其中30 Hz為頻率的峰值。在仿真模型中施加幅值為400 N、頻率為500 Hz的不平衡力,模擬轉(zhuǎn)子高速旋轉(zhuǎn)時的不平衡振動,得到轉(zhuǎn)子的振動波形如圖1c所示,此時轉(zhuǎn)子將產(chǎn)生很大的同頻振動,低頻振動則非常微小。最后,同時施加不平衡力與高斯白噪聲,得到的轉(zhuǎn)子振動波形如圖1d所示,其中除占主導(dǎo)的同頻500 Hz振動外,圖1b中原有的低頻成分也同時出現(xiàn)。
由圖1可看出,磁懸浮轉(zhuǎn)子振動信號中的固有低頻成分與轉(zhuǎn)子受到的不平衡力無關(guān),而當(dāng)系統(tǒng)中存在白噪聲時該低頻振動會明顯增大。
進一步研究系統(tǒng)在白噪聲激勵情況下各環(huán)節(jié)的輸出,如圖2所示。圖2a、2b分別表示系統(tǒng)中控制器環(huán)節(jié)與功率放大器環(huán)節(jié)的頻率特性曲線,圖2c、2d為控制器輸出信號與功率放大器的輸出電流波形。可以看出,白噪聲通過PID控制器后,在中高頻段出現(xiàn)了明顯放大,而由于功率放大器的帶寬限制,輸出控制電流在高頻段幾乎完全衰減,與其傳遞函數(shù)的頻率特性相一致。最后,由于磁懸浮軸承-轉(zhuǎn)子本身具有很大慣性,高頻成分在通過轉(zhuǎn)子后完全衰減,得到圖1b所示的位移輸出。此外,由圖2c、2d可以看出,圖1中所示的低頻成分在控制器與功放的輸出中都存在,且占據(jù)主導(dǎo)作用。
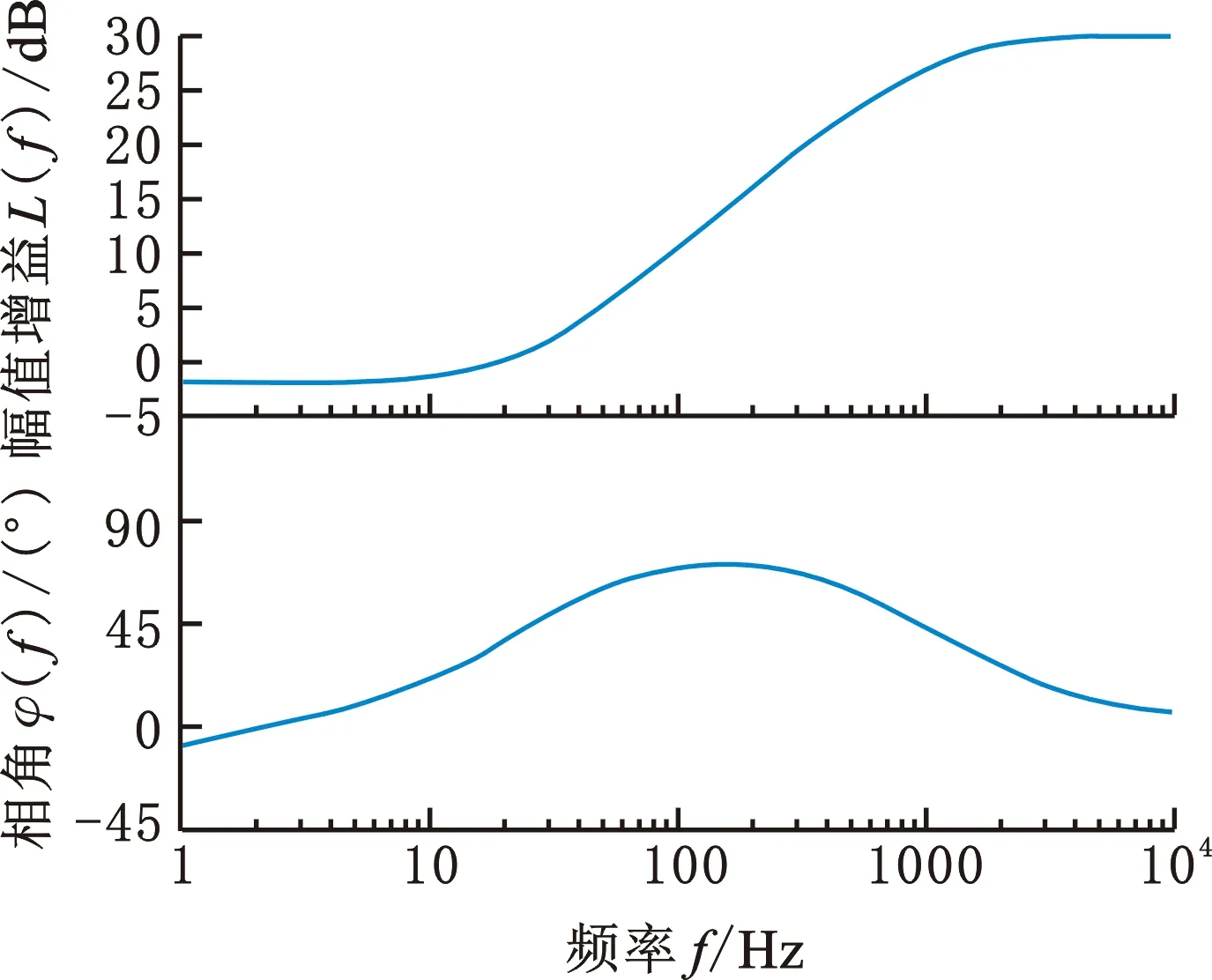
(a)控制器頻率
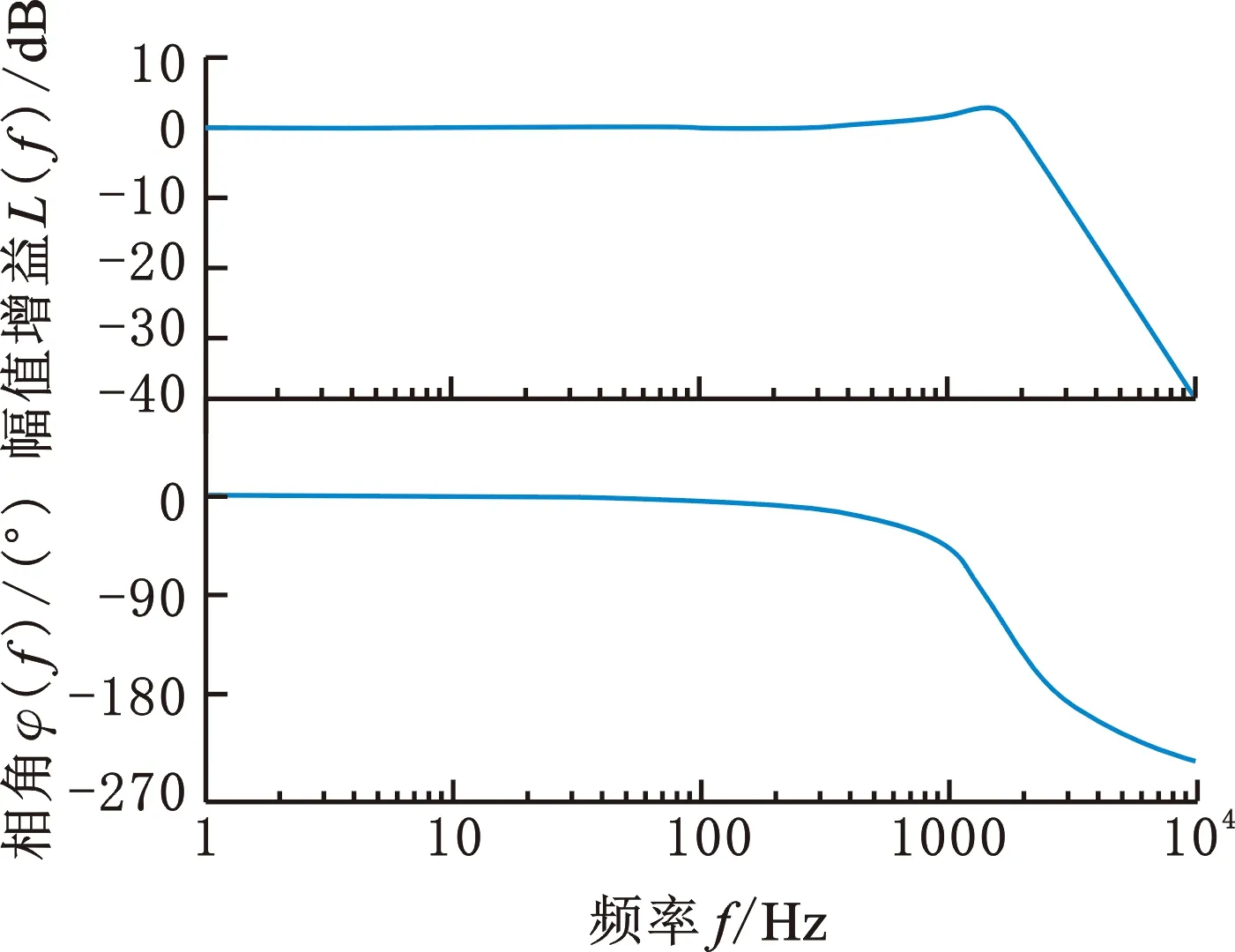
(b)功放環(huán)節(jié)頻率
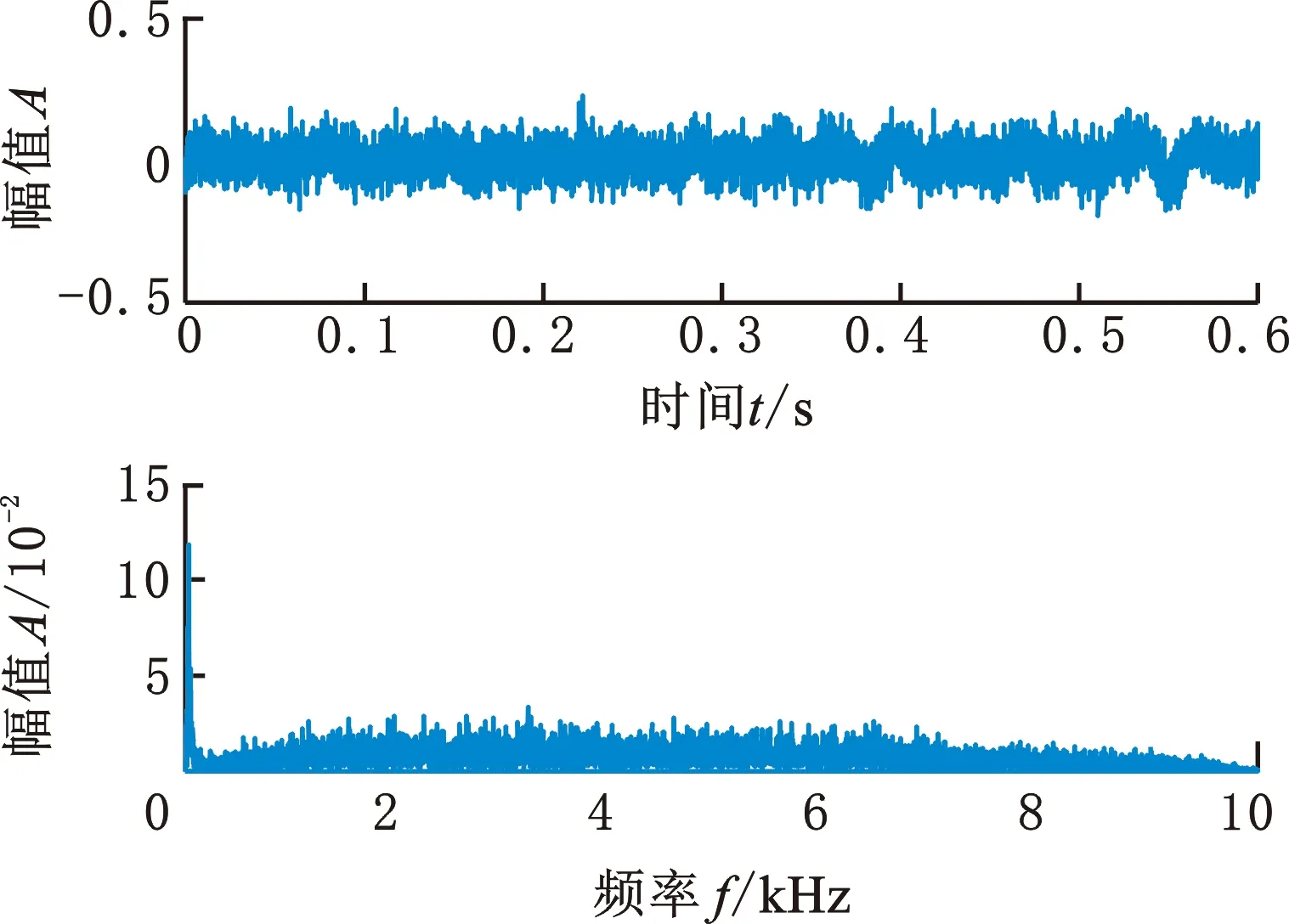
(c)控制器輸出
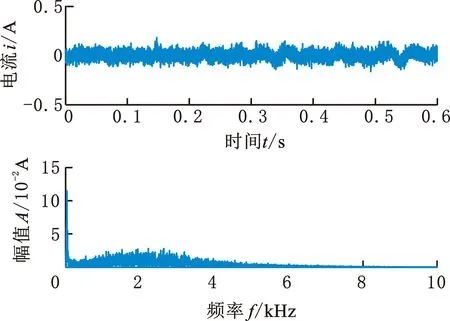
(d)功放環(huán)節(jié)輸出圖2 磁懸浮系統(tǒng)控制器和功放環(huán)節(jié)的伯德圖及白噪聲激勵下的輸出波形Fig.2 Bode diagrams for AMB system and its output waveform
將表1中所有相關(guān)參數(shù)代入上述磁懸浮系統(tǒng)的閉環(huán)傳遞函數(shù),計算其特征根,得到此時整個磁懸浮系統(tǒng)的主導(dǎo)極點,為一對共軛復(fù)根-205.37±42.54j,根據(jù)自動控制原理的基本理論計算該磁懸浮系統(tǒng)的固有頻率,為33.38 Hz,與仿真結(jié)果非常接近,因此可以得出如下結(jié)論:磁懸浮轉(zhuǎn)子的低頻振動由閉環(huán)控制系統(tǒng)的固有頻率決定,該振動會在噪聲的激勵下被激發(fā),減小系統(tǒng)的噪聲可以有效地抑制該低頻振動。
2 基于ESO的振動補償策略
擴展?fàn)顟B(tài)觀測器(extended state observer,ESO)是在原有全階觀測器的基礎(chǔ)上,將外部干擾及模型中的不確定性作為擾動,并將其擴展成為一種新的狀態(tài)變量的方法,它不依賴于生成擾動的數(shù)學(xué)模型,具有很強的實用性。對于n階系統(tǒng),ESO的基本形式如下:
(4)
(5)


以磁懸浮轉(zhuǎn)子系統(tǒng)為被控對象,將式(2)改寫為狀態(tài)方程的形式:
(6)
式中,x1為轉(zhuǎn)子位移量x(t);u(t)為磁懸浮控制電流i(t);a=Kx/m;b=Ki/m。
考慮工程實現(xiàn)的簡便性,將ESO中的非線性函數(shù)簡化為線性,即gi(e1)=e1,則得出線性ESO的形式如下:
(7)
將模型式(7)與磁懸浮軸承系統(tǒng)狀態(tài)空間方程式(6)作差,并記e1=z1-x1,e2=z2-x2,e3=z3-x3,即可得到誤差方程:
(8)

根據(jù)式(7)可以得到加入ESO的磁懸浮控制系統(tǒng),如圖3所示。

圖3 加入ESO的磁懸浮控制系統(tǒng)結(jié)構(gòu)原理圖Fig.3 The schematic diagram of AMB control system with ESO
當(dāng)前關(guān)于ESO本身收斂性的理論已較為成熟,但是如圖3所示,ESO的加入改變了原有磁懸浮控制系統(tǒng)的結(jié)構(gòu),必然導(dǎo)致系統(tǒng)的穩(wěn)定性發(fā)生改變,需要進一步研究。
根據(jù)圖3中控制系統(tǒng)的結(jié)構(gòu),將控制器輸出量u改寫為位移量Vx,得
(9)
將式(9)代入式(7),可使ESO簡化為一個SISO系統(tǒng),推導(dǎo)出其傳遞函數(shù)為
(10)
為進一步簡化設(shè)計過程,根據(jù)文獻[18],將參數(shù)β01、β02、β03配置成β01=3ω,β02=3ω2,β03=ω3的形式,則ESO系統(tǒng)的收斂性及磁懸浮系統(tǒng)的穩(wěn)定性取決于系數(shù)ω。代入圖3中所有傳遞函數(shù)及表1中的相關(guān)系數(shù),以ω為單一變量求取嵌入ESO后磁懸浮閉環(huán)控制系統(tǒng)的特征根,并繪制出相應(yīng)的主導(dǎo)根軌跡,如圖4所示。可以得出當(dāng)ω>530后,閉環(huán)系統(tǒng)全部特征根均位于左半平面,系統(tǒng)保持穩(wěn)定。

圖4 加入ESO的磁懸浮閉環(huán)系統(tǒng)主導(dǎo)根軌跡Fig.4 Root locus of AMB control system with ESO
3 仿真與試驗
3.1 仿真分析
在MATLAB/Simulink中建立圖3所示的磁懸浮控制系統(tǒng),仿真涉及的主要參數(shù)如表1所示。首先驗證控制系統(tǒng)對白噪聲的抑制效果,在穩(wěn)態(tài)懸浮時加入PSD高度為0.03的白噪聲,當(dāng)ESO的控制增益ω分別為500、600、10 000時,系統(tǒng)輸出的轉(zhuǎn)子振動波形及ESO的誤差量e1、e2如圖5a、5b、5c所示。從圖中可以看出,當(dāng)ω=500時,系統(tǒng)并不穩(wěn)定,轉(zhuǎn)子振動信號經(jīng)過短時振蕩后逐漸失穩(wěn)。ω增加至600后,系統(tǒng)輸出穩(wěn)定,但由于增益較小,ESO并不能很好地抑制干擾,此時磁懸浮轉(zhuǎn)子在白噪聲的干擾下仍呈現(xiàn)了較大的低頻振動,通過圖5b、5c中展示的誤差信號也可以看出,此時ESO對系統(tǒng)狀態(tài)的估計還存在較大的誤差,繼續(xù)增大ω至10 000,此時ESO的估計誤差基本為零,對比圖1b中未加入ESO反饋的情況(振動峰值4.65 μm),轉(zhuǎn)子原有低頻振動大幅下降(峰值1.12 μm)。

(a)轉(zhuǎn)子振動波形
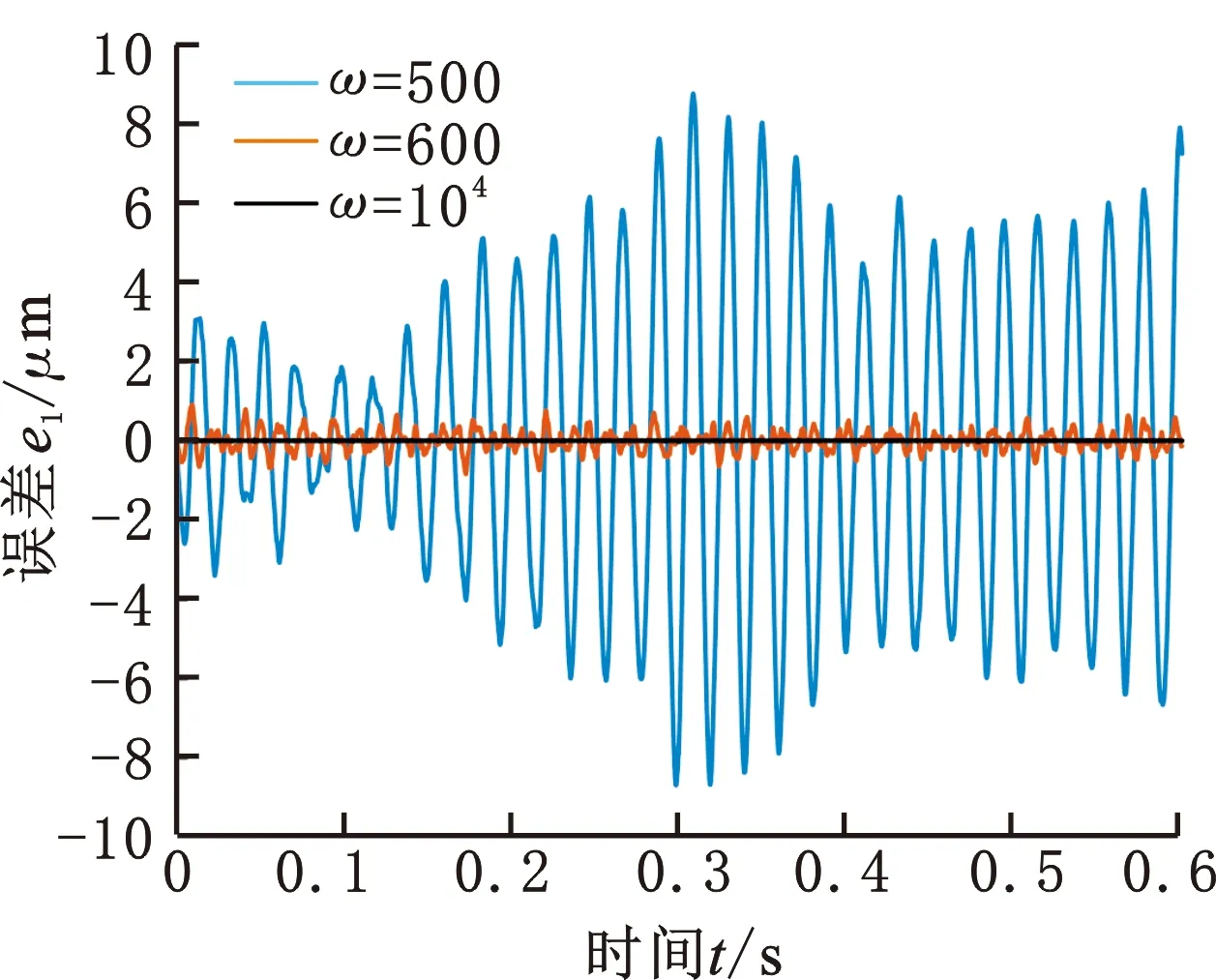
(b)誤差e1
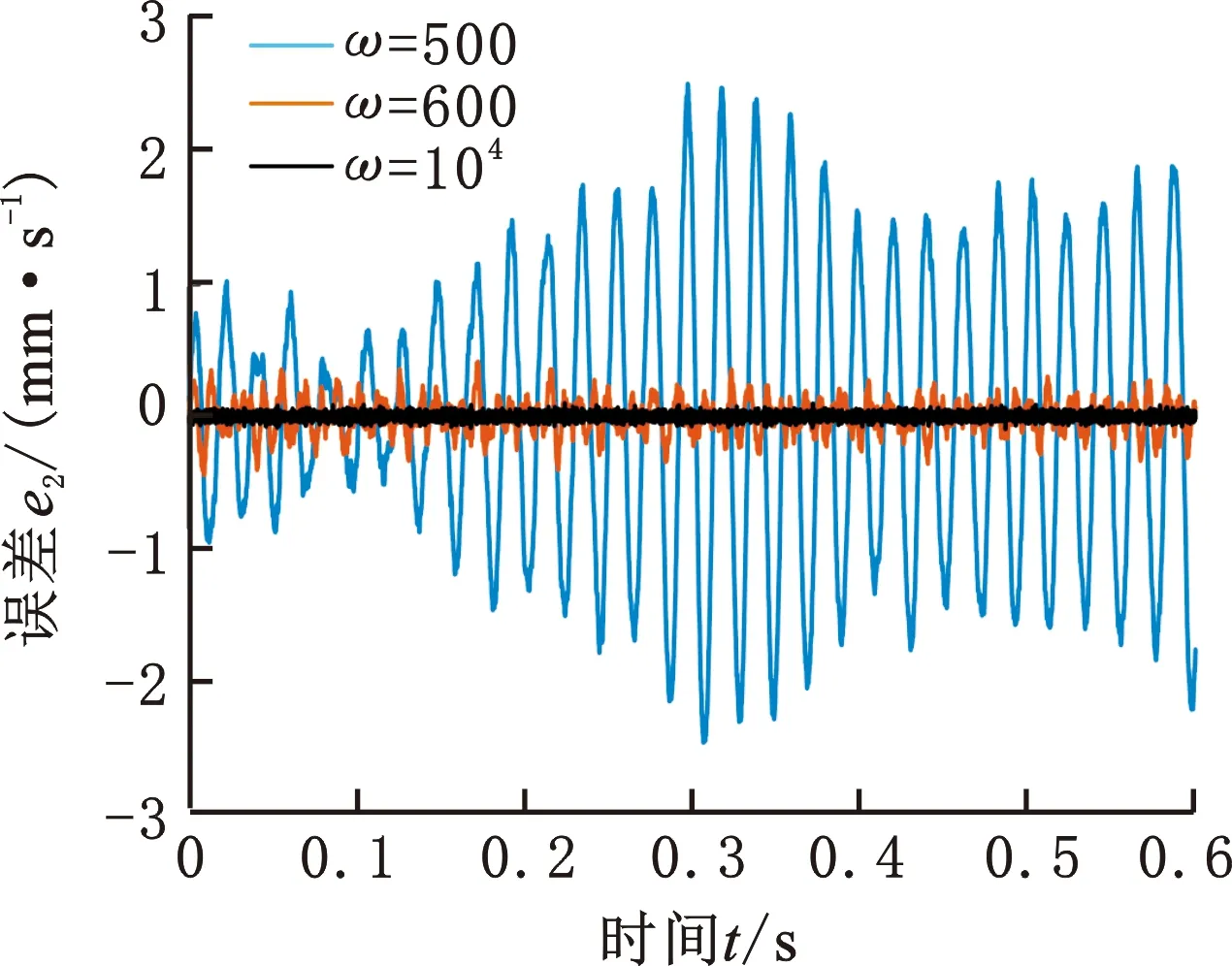
(c)誤差e2

(d)加入500 Hz不平衡力圖5 加入ESO的磁懸浮閉環(huán)系統(tǒng)仿真波形Fig.5 Simulation waveforms of AMB control system with ESO
在白噪聲的基礎(chǔ)上進一步加入500 Hz不平衡力,轉(zhuǎn)子振動輸出信號如圖5d所示,圖中藍色波形為未加入ESO反饋的情況,黑色波形為加入ESO反饋后的輸出情況,對比可知,加入ESO反饋后,轉(zhuǎn)子的振動量大幅下降,由峰值14.5 μm下降至峰值6.9 μm,通過頻譜圖可以進一步看出100 Hz以下低頻分量明顯下降。由此可以得出結(jié)論:提出的基于ESO的擾動補償策略可以很好地克服外界的擾動,降低磁懸浮轉(zhuǎn)子運行時的振動量。
3.2 試驗研究
為驗證磁懸浮轉(zhuǎn)子低頻振動與激勵的關(guān)系及振動補償策略的有效性,本文在一臺額定功率110 kW的磁懸浮高速永磁電機上進行驗證試驗。試驗所用電機及測試環(huán)境如圖6所示,電機及基礎(chǔ)控制系統(tǒng)主要參數(shù)如表1所示。試驗波形均為示波器實測數(shù)據(jù)后在MATLAB中繪制,為便于分析,繪制波形時將示波器測試的電壓值直接換算為了轉(zhuǎn)動量(傳感器的靈敏度為20 V/mm)。
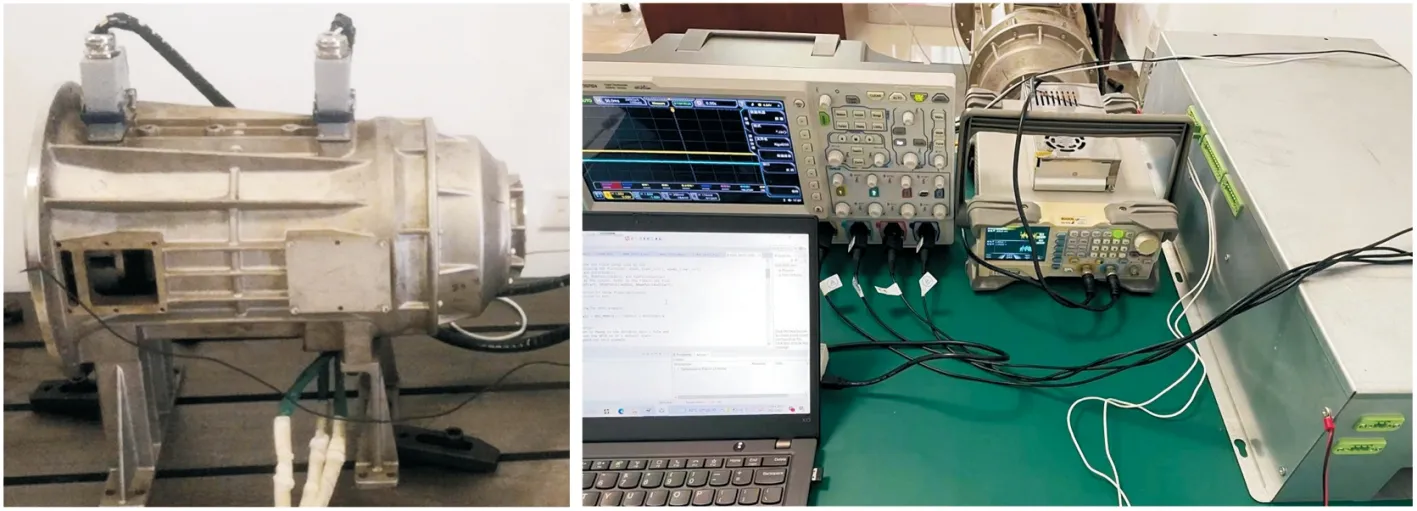
圖6 磁懸浮高速電機及其試驗臺Fig.6 The prototype of AMB based motor and its test board
圖7所示為穩(wěn)態(tài)懸浮時,白噪聲作用下磁懸浮轉(zhuǎn)子的振動波形及頻譜特性。圖7a所示為使用單一PID控制時轉(zhuǎn)子的振動波形,可以看出轉(zhuǎn)子表現(xiàn)出了明顯的低頻振動,其峰值頻率為35 Hz,與之前的理論分析非常接近,此時的最大振動量為13.8 μm,圖中100 Hz的振動為電子整流器引入的干擾(兩倍于工頻)。在控制系統(tǒng)中加入ESO補償,則在同樣白噪聲激勵下,輸出的振動波形如圖7b所示。在ESO的作用下,轉(zhuǎn)子的振動得到了一定的抑制,最大振動量下降至10.9 μm,較單一PID控制時下降約21%,且從信號頻譜看,其低頻振動被有效抑制。
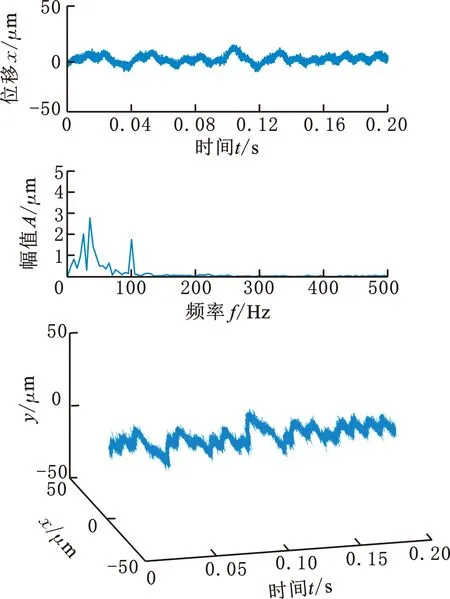
(a)單一PID控制
(b)加入ESO圖7 白噪聲激勵下轉(zhuǎn)子振動波形及頻譜特性Fig.7 Vibration waveforms and its spectrum for AMB based rotor with random excitation
同時對系統(tǒng)施加白噪聲及100 Hz不平衡力激勵,得到的輸出波形如圖8所示。圖8a所示為單一PID控制時的波形,由于不平衡力起了主導(dǎo)作用,轉(zhuǎn)子產(chǎn)生了很大的同頻振動,達到36.2 μm,低頻振動此時并不明顯,但仍然存在。同樣條件下,加入ESO補償,輸出如8b所示。此時轉(zhuǎn)子振動大幅下降至20 μm,比單獨PID控制下降了44.8%,可見本文提出的補償策略對同頻干擾同樣適用。
(a)單一PID控制
(d)加入ESO圖8 白噪聲與不平衡力激勵下轉(zhuǎn)子振動波形及頻譜特性Fig.8 Vibration waveforms and its spectrum for AMB based rotor with noise and unbalanced force excitation
圖9展示了轉(zhuǎn)子在30 000 r/min高轉(zhuǎn)速下的振動波形及頻譜特性。圖9a所示為使用單一PID控制方法時轉(zhuǎn)子的振動波形,此時轉(zhuǎn)子在不平衡力的激勵下表現(xiàn)出了較大的同頻振動并同時伴隨有很小的低頻振動,其最大振動量達到27.8 μm。同樣轉(zhuǎn)速下,加入ESO補償,振動波形如圖9b所示,可以看出在補償器的作用下,同頻振動明顯減小,最大振動量下降至20.4 μm,下降幅度約26.6%。

(a)單一PID控制

(b)加入ESO圖9 30 000 r/min時轉(zhuǎn)子振動波形及頻譜特性Fig.9 Vibration waveforms and its spectrum for AMB based rotor during 30 000 r/min
4 結(jié)論
(1)磁懸浮轉(zhuǎn)子的低頻振動由閉環(huán)控制系統(tǒng)的固有頻率決定,與轉(zhuǎn)子當(dāng)前的轉(zhuǎn)速無關(guān)。
(2)低頻振動會在外部噪聲的作用下被激發(fā),減小控制系統(tǒng)中的噪聲可以有效抑制該低頻振動。
(3)ESO可以很好地估計外部噪聲,相應(yīng)的振動補償策略能夠有效地抑制轉(zhuǎn)子的振動。通過試驗驗證,在同樣白噪聲激勵下,加入ESO補償器后轉(zhuǎn)子最大振動量較單獨使用PID控制時下降約21%;在30 000 r/min轉(zhuǎn)速下,ESO補償器的作用更為明顯,轉(zhuǎn)子最大振動量下降了26.6%。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
