登高平臺消防車工作斗自動調平技術研究
2022-09-20 07:58:24王龍
科技創新與應用 2022年26期
關鍵詞:系統
王 龍
(東營市消防救援支隊,山東 東營 257000)
隨著我國經濟社會的快速發展,現代城鎮化規模的不斷擴大,城市在規劃建設中高層建筑越來越多,建筑物越來越密集,一旦高層建筑發生火災事故,對于救援難度極大。登高平臺消防車的設計有效地解決了這一問題,是消防員進入火災現場開展高空滅火、營救被困人員的首選裝備,有效提高了消防隊員的滅火能力和救援水平。因此,借助登高消防車進行高空作業,可供消防人員第一時間進行施救,但高空救援對于升降調平系統是極大的挑戰,在消防車工作斗升降的過程中,由于臂架的變幅運動與地面呈現曲線運動,操作不當就會造成工作斗發生傾斜。如果工作斗出現來回調整、傾斜及過調等問題,就無法保證工作斗的穩定性,進而影響消防員的有效救援。為保證工作斗內消防員的安全,本文著重闡述了機械液壓組合對消防車工作斗調平的工作原理,論述了登高平臺消防車工作斗自動調平系統,保證工作斗在升降中始終處于水平狀態,為消防員實施高空救援提供有效保障。
1 登高平臺消防車工作斗調平工作原理
登高平臺消防車主要由升降系統(臂架系統)、工作斗、支撐系統、底盤、消防系統、電氣系統和液壓系統等部分構成,采用獨立調平的液壓設計系統[1]。工作斗又被稱為工作平臺,安設在臂架系統的最前端,工作斗具有載人和滅火的功能,消防員在工作斗中可通過控制平臺操作臂架,噴射水炮滅火或噴出水霧為工作斗降溫。登高平臺消防車工作斗調平性能是保障消防員作業安全、評價消防車工作性能的關鍵環節。在工作斗安裝傾角傳感器用來確定臂架伸展的角度,測算臂架距離地面的水平夾角,通過夾角的變化,操作閥塊控制臂架的伸展、變化等動作,通過調平油缸的伸縮和連桿系統的協調運轉,確保工作斗始終處于正確的水平位置,便于工作斗中的消防人員開展救援。電液比例閥能夠根據電控、手動和液控等方法對液壓油缸進行調節,系統依托算法調節電液比例調節裝置,通過轉換模塊,根據工作斗傾斜的角度按比例與電流信號相對應,將電流信號輸送到PLC控制系統之中,PLC經過計算控制調平油缸的電液比例閥門和伸縮長度,控制工作斗向上傾斜或向下傾斜,以此保證根據現場實際滿足救援的需要[2]。
2 影響登高平臺消防車工作斗調平的因素分析
為確保登高平臺消防車工作斗調平系統的穩定運行,保證消防員高空作業的安全,調平系統必須要保證消防工作斗的穩定性,防止工作斗在升降過程中出現抖動、偏離等問題。目前,經過實踐來看,影響工作斗調平的因素主要有以下方面。
2.1 液壓閥的控制
液壓閥是整個調平系統的關鍵,也是整個控制系統的核心部件,液壓閥的精度決定了調平的穩定性[3]。當前,液壓閥主要有伺服換向閥或比例換向閥。電液伺服閥具有高精度的閥芯監測裝置,在接收到模擬信號后,輸出相應的調制流量和壓力,保證臂架的有效運動,但伺服閥成本較高,對液壓油的清潔程度要求極高,經常因油液受到污染而發生閥門磨損的問題,所以在登高平臺消防車推廣使用上有一定難度。電液比例閥加工相對簡單,元件數量較少,加工成本在可控范圍之內,在復雜環境中可以無障礙使用,能夠連續地無間斷地根據比例需求,對油液的壓力、流量或方向進行控制,有著極高的穩定性和快速響應能力。因此,大多數登高平臺消防車采用液壓比例閥進行調平,這也符合技術進步和產品應用發展趨勢。
2.2 傳感器的控制
調平系統中發揮決定性作用的是傳感器,如果傳感器輸出的信號不準確,就會造成電液比例閥輸出的動作與實際不符。因此,傳感器是調平控制系統的主要信息來源,其傳感器的精準度、穩定性至關重要。當前,登高平臺消防車的傾角傳感器多為重力感應裝置,用來測量傾角的數據,當工作斗與水平地面出現夾角,傳感器受重力偏移的影響,設備中的電位器就會發出電流信號,信號越強傾角越大。但如果工作斗不穩定,在風力或其他外力作用下出現振動,就會使傳感器容易受到環境的影響,使其精準度無法保證。
2.3 算法的控制
通常情況下,控制的精度越高,對工作斗調平系統效果就越好,但實際情況是,精度的提高意味著成本的上升、算法更為復雜,需要根據登高平臺消防車的實際狀況確定控制系統。電液比例調平作為工作斗調平的主流設備,被廣泛應用于調平系統之中,但電液比例調平還有很多不足,為確保工作斗的穩定性和精準度,就需要在不增加硬件設備投入的情況下,不斷優化控制算法,使其與調平系統相匹配[4]。
3 登高平臺消防車工作斗調平系統設計
登高平臺消防車工作斗調平系統主要包括PLC、傾角傳感器、電液比例閥、調平油缸、控制電路等臂架系統等構件組成,分為檢測系統、控制系統和執行系統3部分,檢測系統主要用來檢測收集數據并傳輸給控制系統,控制系統根據傳輸的信號作出響應,執行系統再根據控制動作,根據臂架的實際情況進行升降調平。整個調平系統的工作流程如圖1所示。
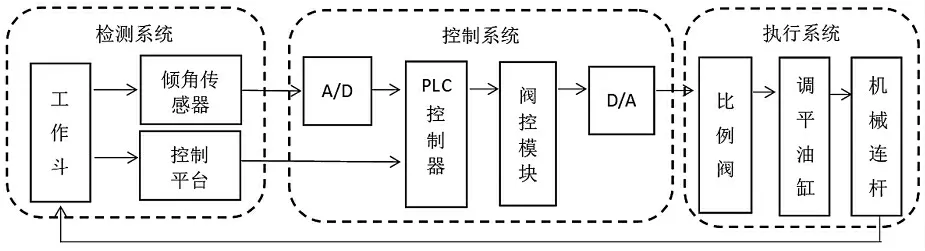
圖1 登高平臺消防車工作斗調平系統結構圖
3.1 檢測系統
檢測系統主要由傾角傳感器組成,用來檢測工作斗與水平地面之間的傾角,檢測的結果作為工作斗調平的重要依據,其傾角傳感器的精度直接影響最終的調平結果[5]。傾角傳感器具有體積小、精度高和功耗低等特點,安裝在消防車工作斗上,可實時采集工作平臺傾角信號,輸出模擬量電流信號,電流輸出的大小是根據工作斗傾斜角度變化而變化的,滿足用戶靜態條件下高精度傾角測量等應用需求。操作人員通過臂架操作臺可以將控制信息傳送到調平控制器,控制器根據接收到的操作信息,將臂架運動的軌跡和狀態形成數據,反饋到控制器之中,獲得臂架角度、臂架姿態等數據。登高平臺消防車工作斗如圖2所示。
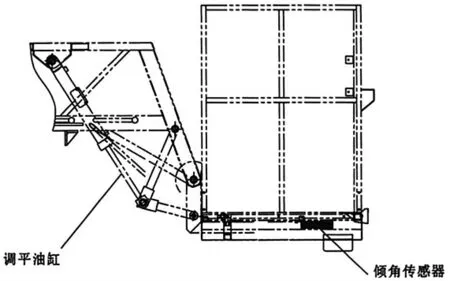
圖2 登高平臺消防車工作斗示意圖
當工作斗升降的過程中,消防車臂架開始運動時,會使得工作斗與水平面發生偏離狀態,即工作斗與水平面產生夾角α,這個過程中傾角傳感器感知夾角大小,經過A/D轉換模塊,轉換為模擬電流信號,傳輸到PLC的輸入端口,從輸入值的變化趨勢可以分析出工作斗的傾斜方向,電流信號輸入越強說明夾角越大,反之輸入越弱則說明夾角越小。傾角傳感器內設繼電器,如果傾斜角度始終在-10°~10°之間,繼電器就始終保持吸合狀態;如果一旦夾角超過-10°或10°以上,說明工作斗發生嚴重傾斜問題,繼電器會自動斷開,液壓系統隨之失去運動能力,工作斗也會緊急停止工作狀態。但在工作斗調平之初,前提條件是要保證消防車處于水平位置,這個階段需要通過液壓泵調節支撐腿,使得4個支撐腿處于同一水平位置,PLC傳感器讀取支撐腿的壓力和數值,根據傾角傳感器調整支撐腿的升降,使得整個消防車控制臺處于同一平面,為下步消防車工作斗升降奠定基礎[6]。
3.2 控制系統
控制系統主要由操縱裝置、電子電路、單片機、PLC和安全裝置組成,用來解決登高平臺消防車臂架、工作斗運動問題,該種方式調平性能好、技術水平領先,而且適用性能廣,可有效確定設備運動方向和運行速度,控制設備的啟動停止。PLC控制器作為控制系統的核心部件,具有通用性好、實用性強、編程容易和可靠性高等特點,可實現登高平臺消防車臂架自動控制、安全保護,使得消防車的操作更加安全、簡單和可靠。PLC控制器在接收到電流信號后,通過PLC控制器的內部模塊算法處理后,得出工作斗傾斜的角度,形成控制調平油缸電液比例閥的脈沖調制信號,觸發液壓缸電磁閥開關,根據傾角傳感器提供的輸入信號,可有效控制電液比例閥的開關比例,從而保證控制油缸的伸展和縮短長度,驅動工作臂和工作斗上下運動,始終保持工作斗在可控水平的范圍內升降。該過程中PWM技術是核心,該技術驅動電液比例閥的開度,通過系統中的半導體元件進行通斷控制,將直流電壓轉變為一種脈沖信號,使得輸出端接收到脈沖進行調節,PWM技術的本質就是脈寬調制,通過輸出不同的占空比,從而將直流電壓轉換成不同電壓值的模擬信號。
電磁閥的換向和開口大小控制液壓油缸的變動幅度,傳遞到臂架結構上,電液比例閥有2個口,進油口A和回油口B。當A口進油,B口回油時,油缸的活塞桿就會伸長,工作斗出現上仰的狀態;當B口進油,A口回油時,油缸的活塞桿就會縮短,工作斗出現下俯的狀態,最終使工作斗恢復至水平。與此同時,為防止自動調平系統出現失靈的問題,登高平臺消防車還設置了手動調平系統,當消防車自動調平系統出現故障,系統會為手動控制平臺電磁閥通電,使得閥芯發生變動,推動油液進入到調平油缸之中,實現消防車工作斗的手動控制。比例閥液壓原理如圖3所示。
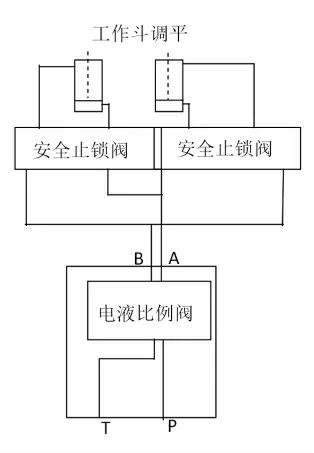
圖3 比例閥液壓原理圖
3.3 執行系統
執行系統基本采用電氣液壓操縱方式,由臂架、機械液壓組合、連接電纜和液壓管路等組成。臂架系統是登高平臺消防車執行系統的重要構件,由高強度、安全性能好的鋼板結構組成,從臂架側面安裝了消防管路,可保證消防液輸送到高空進行滅火。登高平臺消防車臂架結構分為折疊式、伸縮式、混合式和垂直升降式等,消防車普遍使用的是混合式臂架,主要采用伸縮和折疊式臂展結合的方式,對工作斗進行升降控制。該方式兼顧伸縮和折疊優點,可適用于大高度下的高空消防救援。臂架系統主要由調平連桿組成,調平連桿由一組或多組平行四邊形組成,各平行四邊形的短邊相連接,根據平行四邊形對邊保持平行的原理,在臂架運動的過程中2組或多組四邊形對邊始終處于平行位置,由此保證臂架無論如何折疊或伸縮,其工作斗都處于連續的運動過程,始終保持處于水平的狀況[7]。登高平臺消防車機械連桿系統如圖4所示。

圖4 登高平臺消防車機械連桿系統圖
機械連桿系統根據平行四邊形的原理用來保持工作斗處于水平狀態,整體機械的折疊臂主要由BC、CD、EF、FG、GH、HI和IJ等部分構成,臂架主要由3組平行四邊形連桿系統構成,連桿系統將工作斗與調平油缸相連接,調平油缸的伸縮可影響連桿系統的變動,通過銷軸鉸接相連接傳遞作用力,帶動消防車工作斗轉動,點A、G和J作為消防車臂展之間的連接點,在一號臂展和二號臂展變動時,由于幾個點位始終保持平行四邊形狀態,當臂架運動起落時,平行四邊形AB與CD保持平行,FG與DE保持平行,IJ與GH保持平行,這使得臂架無論如何變化,通過變幅油缸的調節變化,工作斗始終保持在水平的狀態。
4 結束語
工作斗是消防車高空滅火、救援人員的必備裝備,對于高層建筑物安全救援具有重要作用,工作斗自動調平系統首要任務就是穩定性、安全性和舒適性,消防員在消防車工作斗作業,一旦升降過程中發生工作斗傾斜,極容易產生新的危險。隨著液壓控制裝備越來越智能化和先進化,快速調平工作斗是保證消防救援的關鍵。本文通過PLC控制系統精準控制油缸動作,解決了消防救援高空作業工作斗調平問題,為驗證登高平臺消防車工作斗自動調平系統的性能,在實際測試中發現,工作斗傾角基本上都可以控制在3°之內,保證了工作斗升降過程自動調平,在眾多場合滿足高空救援的使用需求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
