談實景三維助力房屋安全管理★
2022-09-21 03:20:26孫永康石維康楊建雙
山西建筑 2022年19期
關鍵詞:模型
孫永康,李 楊,閆 昶,孫 磊,石維康,楊建雙
(1.江蘇省地質測繪院,江蘇 南京 211102;2.江蘇省基礎地理信息中心,江蘇 南京 210013)
0 引言
近年以來房屋安全事故頻發,為深入貫徹習近平總書記關于安全生產工作的重要論述和重要指示批示精神,防范遏制重特大房屋建筑安全事故,房屋安全管理受到各界人士的關注。隨著無人機傾斜攝影技術的高速發展,實景三維已經成為未來城市房屋安全管理的主流,同時也可為智慧城市建設、規劃、治理提供基礎數據支撐。
1 研究區概況
響水縣位于東經119°29′~120°06′,北緯33°56′~34°33′。在鹽城、淮安、連云港三市交匯處。東臨黃海,與日本、韓國、朝鮮等國隔海相望。年平均氣溫為13.6 ℃,最高氣溫為38.7 ℃,最低氣溫為-17 ℃。年平均降水量為895.3 mL,年平均日照2 399.7 h。氣候溫和濕潤,四季分明。全縣總面積1 473.8 km2,下轄8個鎮、3個工業園區,總人口60萬人。
響水縣城約37.68 km2(如圖1所示),縣城通榆河以東、雙園路以北以工礦企業和部分居民小區為主,房屋高度普遍較低。部分建筑如濱江上海城等高層建筑高度超過80 m。在雙園路、黃海路、珠江路、金海路圍成的區域內,既有企業房屋,也有部分較高的商業和居民樓房。在通榆河以西的測區范圍內無高層建筑。以銀河路、金海路、黃河路為界限的以南地區,除葛莊十二組、港龍首府等小區有較高樓層外,其他區域均為較矮房屋。除去以上區域,測區內其他區域均有高層建筑,特別是珠江路、金海路、銀河路、通榆河圍成的區域內,高樓林立。總體上,大部分建筑物高度在60 m以內,部分建筑高度超過80 m,但低于100 m。

2 技術路線
通過無人機進行航空傾斜攝影獲得影像數據,進行空中三角測量,以此為基礎,按照國家和行業標準規范制作三維實景建模成果[1]。
2.1 傾斜影像采集
2.1.1 傾斜影像采集準備
本次采用了一架大疆M300 RTK多旋翼無人機搭載一套賽爾PSDK 102S傾斜數碼航攝儀執行本次項目的航空攝影任務。根據縣城實際情況,對響水縣城區域分區后進行航線設計,主要確定航攝儀技術參數、地面分辨率、測區內平均高程、重疊度等。
1)地面分辨率及相對航高。
數碼航空攝影的地面分辨率(GSD)取決于飛行高度,按照下列公式求得相應GSD的飛行高度[2-5]:
其中,h為相對航高;f為下視鏡頭焦距;a為像元尺寸;GSD為地面分辨率。
2)航線布設方向。
根據分塊測區的范圍形狀,進行航線方向設計。
3)航攝范圍覆蓋。
為了保證測區邊界三維建模,旁向范圍和航向范圍的設計均超出測區邊界距離不小于一個行高距離。
4)像片重疊度。
為保證建模質量,本次采用航向重疊度85%,旁向重疊度75%的像片重疊度進行數據采集[6-9]。
2.1.2 傾斜影像數據采集
在航線設計完成后,對測區進行傾斜攝影數據采集工作。數據采集完成后進行航攝數據整理工作,本次使用賽爾航測管家軟件進行影像數據、POS數據等航攝數據下載。
2.2 三維傾斜模型制作
2.2.1 三維建模工程創建
基于外業采集的傾斜模型數據,導入ContextCapture軟件中,進行模型建設工程創建。
1)數據準備與處理。
數據準備工作主要包括影像預處理、作業范圍確認、相機參數確認、POS數據整理等[10]。
2)創建工程。
根據分區范圍及預處理后的影像、POS成果創建工程。數據導入后,需要對影像組進行檢查,確保影像無丟失。
2.2.2 空中三角測量
傾斜影像空中三角測量是指解算相機參數、影像位置和姿態,以及加密點三維坐標的過程。基于ContextCapture軟件進行空中三角測量的具體步驟如下:
1)空三提交。
在進行像片檢查合格后,空三加密計算提交工作。
2)影像自動匹配。
提交空中三角測量之后,軟件自動進行影像匹配和空三結果輸出。對于影像自動匹配的結果,可以通過相應的窗口進行檢查。
3)空三解算。
軟件自動進行空三解算。
2.2.3 模型建設
在空中三角測量的基礎上,進行模型建設。
1)模型參數設置。
根據模型建設需要設置相關模型參數。
2)三角網構建。
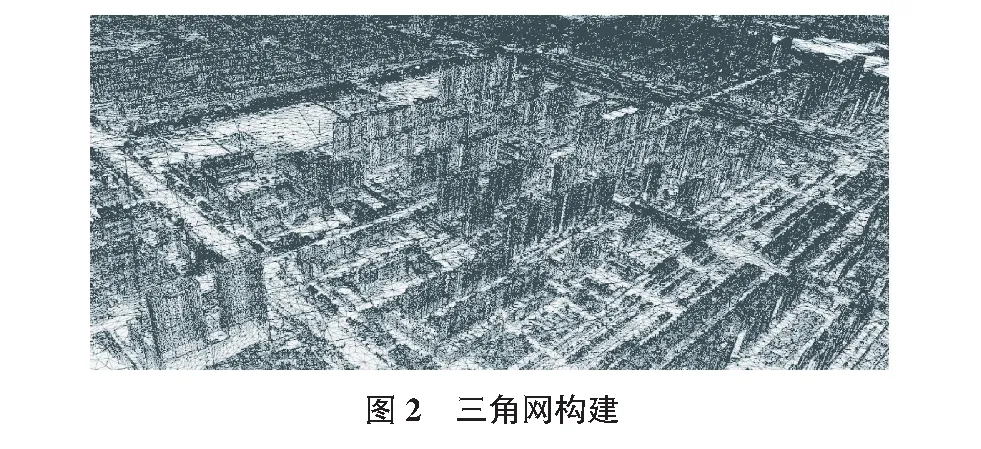
基于空三加密成果進行多視影像密集匹配,獲取高密度的三維點云,構建三維TIN[11]。由于項目密集點云量較大,將項目切塊分割成若干瓦片進行不同層次細節度下的TIN模型構建,瓦片的大小設置為100 m×100 m。模型提交后,軟件自動進行密集匹配工作,并進行三角網建設(如圖2所示)。
3)紋理映射。
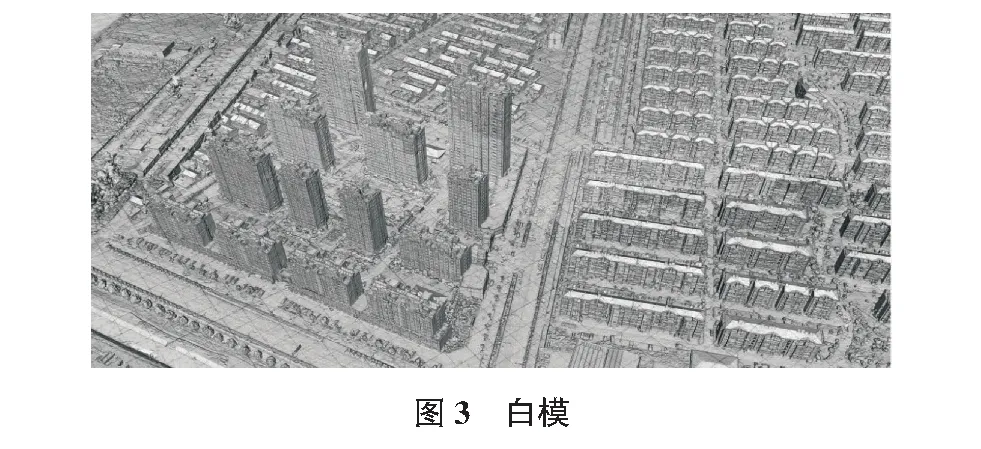
三維模型紋理映射包括三維模型與紋理圖像的配準和紋理貼附。軟件自行計算三維模型的每個三角形與影像中對應區域之間的幾何關系,并找到每個三角形面在紋理影像中對應的實際紋理區域,實現三維模型與紋理圖像的配準。配準的紋理圖像反投影到對應的三角面片上,實現紋理貼附。軟件利用影像密集匹配的結果,由空三建立的影像之間的三角關系構成三角網,再由三角網構成白模(如圖3所示)[12]。
軟件從影像中計算對應的紋理,并自動將紋理映射到對應的白模上,最終形成真實三維場景(見圖4)[13]。

4)模型輸出。
本次輸出傾斜模型為OSGB格式。
2.3 模型修正
在進行城市實景三維建模過程中,由于地物本身的紋理、運動狀態以及數據采集設備、建模軟件等因素。模型中會出現水面的空洞、建筑物的拉花、建筑粘連以及道路不整潔等現象。因此,在進行模型建模后,利用DP Modeler軟件對懸浮物、漏洞、道路等進行了模型修正工作[14-16]。
2.3.1 碎片、懸浮物刪除
在軟件Obj修飾模塊中,選擇需要碎片刪除的Tile,點擊碎片刪除按鈕,設置平面類型后刪除平面以下的碎片;選擇需要懸浮物刪除的Tile,點擊選取懸浮物,對自動選擇的懸浮物進行刪除。
2.3.2 漏洞修補
漏洞修補主要針對水面破洞和建筑玻璃幕墻空洞問題。本次采用軟件的水面修補工具,進行水面破洞、水面不平整、水面紋理等修復工作。建筑破洞修復工作將使用幾何修正中的融合處理方式進行處理。
2.3.3 道路修飾
針對主要道路面的扭曲、漏洞、車輛變形、零散飄浮碎片以及橋梁隧道下變形等問題,項目進行了道路修飾工作。利用DP Modeler軟件采用高程值擬合的方式,在模型上選取三個以上分布均勻的點,進行道路局部的整平操作,保證道路的連續性;對靜止的車輛壓平保留;對移動的車輛產生的拖影等問題,進行了紋理編輯處理。
2.4 實景三維模型提交
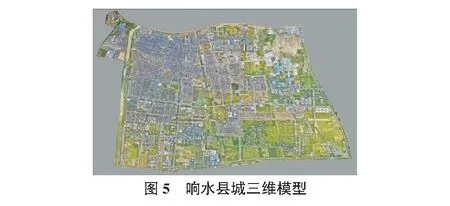
在模型修正完成后,提供OSGB格式的實景三維模型數據(如圖5所示)。該數據為后期配合房屋安全管理提供三維場景基礎數據。
3 實景三維應用
3.1 基于實景三維模型的房屋建筑內業判讀
通過已建成的實景三維模型,可避免因房屋無人在家、視角遮擋等不利排查工作進行的客觀因素,做到內業足不出戶進行初步的排查工作,對房屋的位置坐標、房屋結構、房屋的層次、房屋危險程度、房屋是否改變用途等實現實景排查,大大提高了數據采集的效率與準確度(如圖6所示)。

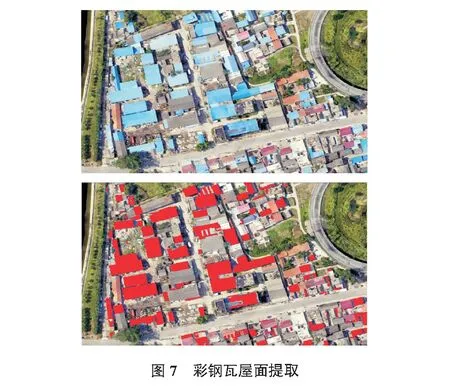
3.2 基于人工智能的影像彩鋼瓦房自動識別與提取
通過已建成的實景三維模型,進行數字正射影像的制作。然后基于影像識別技術根據彩鋼瓦房屋面的特征,實現了對彩鋼瓦房屋面的快速批量提取(見圖7),可以節約大量的排查人力物力。
3.3 基于實景三維模型動態管理
通過已建成的實景三維模型,可進行動態管理,將屬性信息與三維模型相結合,掌握建筑物歷史變遷、權屬變更等重要信息。
4 結論
1)對大范圍區域采用分區航攝的方式進行傾斜數據采集。對于范圍較大城市測區、區域差別較大等區域,采用分區航攝的方法,可以解決遙控器控制范圍有限、高樓遮擋鏈接信號、數據采集系統存儲量有限等問題。
2)實景三維節約房屋安全管理成本、提高管理效率。基于實景三維的房屋安全管理,可節約大量的人力物力,避免視角遮擋、無法進入等不利于管理的客觀因素,結合相關屬性信息為房屋安全管理工作信息化、動態化、常態化提供數據支持,將安全管理工作以新技術手段和新管理方式落到實處、取得實效。
3)實景三維為智慧城市建設提供基礎數據。實景三維的可視性、現勢性為智慧城市建設、城市安全管理、政府規劃設計等提供了有力的數據支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19