基于STC單片機的小型直流電機變頻調速控制器系統設計與制作
2022-09-21 01:34:08趙書紅
電子測試 2022年17期
趙書紅
(江陰職業技術學院,江蘇無錫,214432)
0 引言
直流電機因其具有:1)調速范圍非常廣,比較容易平滑調速;2)響應十分快,啟動、制動和過載轉矩都很大;3)控制方便,十分可靠;調速性能非常好、起動容易、能夠載重起動等優點,在節能環保領域具有廣泛的應用前景[1-4]。直流電機節能體現方式如下:1)直流電機的節能改造技術是將傳統的直流無刷電機改變為步進伺服電機;2)不同的機械設備廠家,都正在尋求更加高效率并且可以節能的辦法,以前的改造方式大都雖然能一定程度上節能,但是會有其他的弊端,直流電機的節能改造為工控自動化行業的廠家轉型帶來了新的動力[5-7]。為實現節能控制,現在直流電機調速控制系統中,絕大多數采用晶閘管相控整流供電,其存在系統體積較大,且模擬電路系統中電阻、電感、電容等模擬電路元件容易受外界環境溫度、濕度、等因素影響,抗干擾能力差等弊端[8]。近些年以來,隨著單片機、數字信號處理器(DSP)等微處理器技術的不斷提高,制造成本的不斷下降,電動機調速控制器裝置采用以微處理器為核心的數字控制系統,是電氣傳動發展的主要方向之一[9]。為拓展直流電機應用降低控制成本,本文提出基于STC單片機的小型直流電機變頻調速控制器系統設計。在完成Proteus仿真的基礎上,本文完成變頻調速控制系統的硬件制作及軟件編程以完成系統控制性能的測試。測試結果顯示:本系統測量所得數據符合正太分布,無明顯的差異性,可實現直流電機的變頻調速控制,在實現電機簡單操作、低成本控制方面具有一定的應用價值。
1 系統總體設計方案及仿真
1.1 總體設計
基于STC單片機的小型直流電機變頻調速控制器系統設計主要包括主控制器、電機驅動、按鍵、液晶顯示及電機測速等功能模塊,其總體設計框圖如圖1所示。其中,主控制器自主完成電機測速數據采集,判斷后通過直流電機驅動實現直流電機調速控制;按鍵模塊接收用戶控制信號,對電機進行正轉、反轉、加速、減速以及停止狀態的控制。
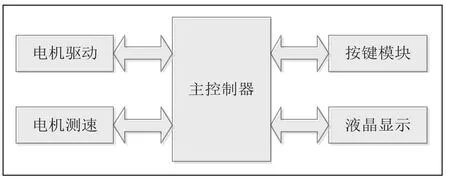
圖1 總體設計框圖
1.2 系統仿真
為驗證系統總體方案的合理性,本文采用Proteus軟件[10]實現系統仿真,如圖2所示。Proteus軟件仿真結果顯示本文所設計總體方案可實現直流電機的變頻調速控制。
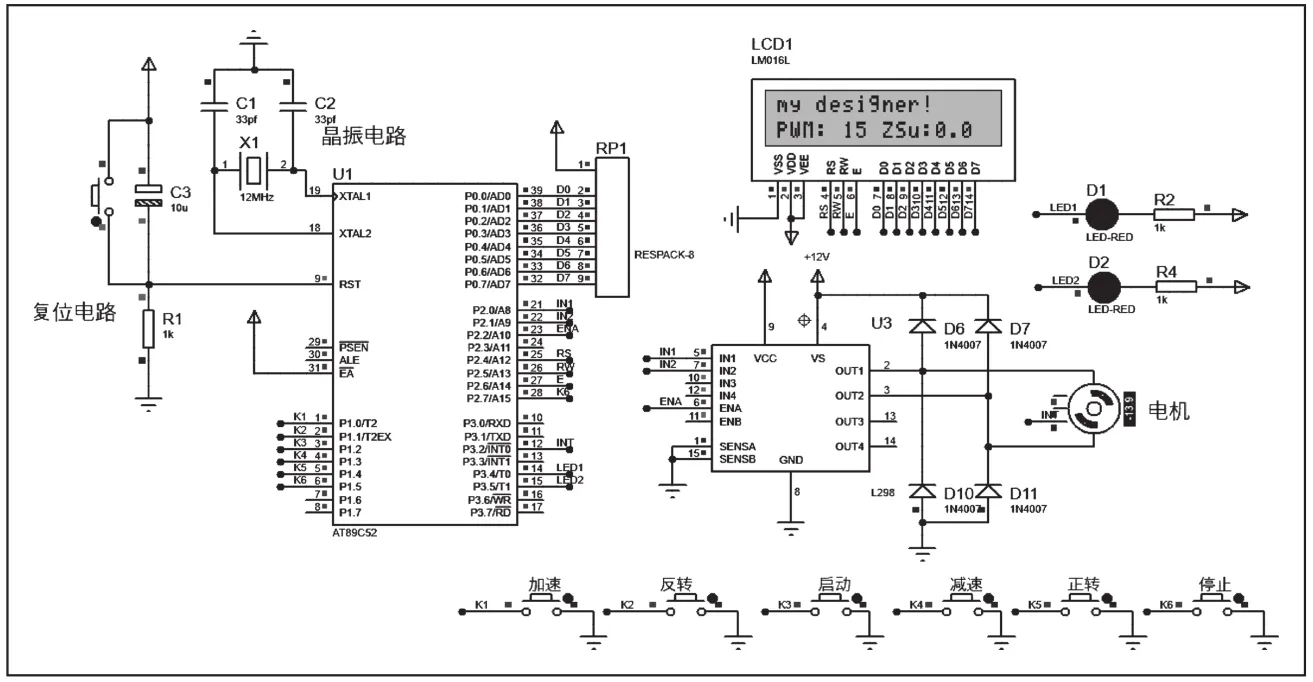
圖2 Proteus軟件系統仿真圖
2 硬件構建及軟件編程
2.1 硬件構建
2.1.1 主控制器
為降低系統成本,本系統主控制器選用STC單片機STC89C52,其電氣原理圖如圖3所示。
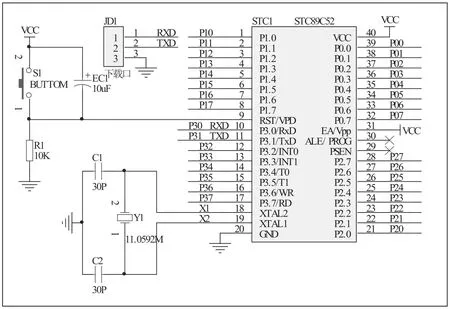
圖3 主控制器電氣原理圖
2.1.2 電機驅動電路
電機驅動選用L298N芯片,其可以通過常用的TTL信號作為輸入信號,7腳為驅動電源輸入,也就是電機的電源輸入端,電氣原理圖如圖4所示。

圖4 電動機驅動電路
2.1.3 按鍵電路
本系統按鍵模塊主要用于實現電機進行正轉、反轉、加速、減速以及停止狀態的控制,其中按鍵S2是電機轉動開始按鍵,接單片機的P1.0;按鍵S3是電機轉動停止按鍵,接單片機的P1.1;按鍵S4是電機正轉控制按鍵,接單片機的P1.2;電機反轉按鍵是S5,接單片機的P1.3;按鍵S6是電機轉動加速按鍵,接單片機的P1.4;按鍵S7是電機轉動減速按鍵,接單片機的P1.5。
2.1.4 顯示電路
本系統顯示模塊選擇LCD1602液晶顯示屏,其電氣原理圖如圖5所示。
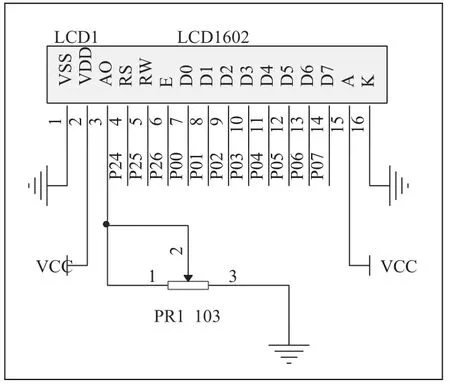
圖5 顯示電氣原理圖
2.1.5 電機測速模塊
本系統中電機測速選用霍爾傳感器,其電氣原理圖如圖6所示。
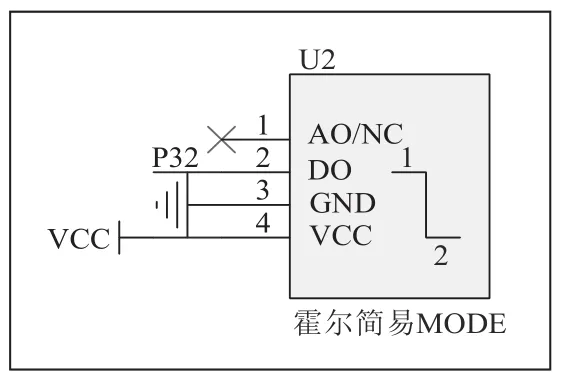
圖6 電機測速原理圖
2.2 軟件編程
本系統軟件編程按照測速、速度設定控制等內容完成軟件編程,其軟件設計流程圖如圖7所示。
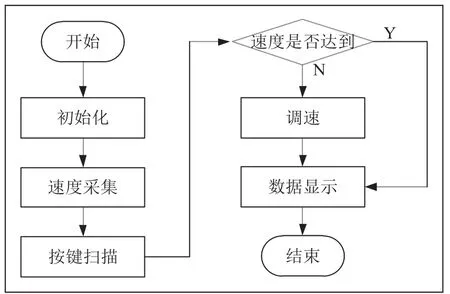
圖7 系統軟件設計流程圖
3 實物制作及數據分析
3.1 實物制作
在完成上述系統硬件構建的基礎上,本系統實物如圖8所示。
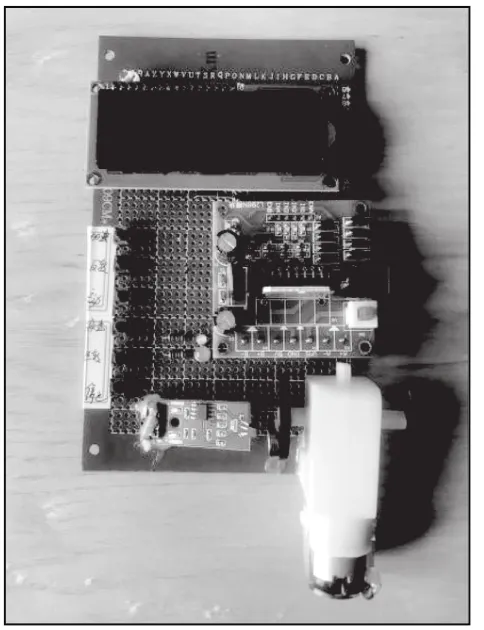
圖8 系統實物圖
3.2 數據分析
將系統實物通電后,通過調整PWM值來改變速度。將采集到的數據進行數據分析,得到分析結果,如下表所示。其中,n為樣本數量;t為student t檢驗[11](Student’s t test),主要用于樣本含量較小(例如n<30),總體標準差σ未知的正態分布;p為相關性分析,當p值大于0.05時,則說明這兩組數據沒有顯著的相關性;R2代表數據的線性度,其數值越接近1,表明線性度越好。
表1線性回歸分析結果數據顯示R2為0.993≈1即兩組數據的線性度很好,即通過調整PWM值可實現直流電機的線性調速;表2經Kolmogorov-Smirnov檢驗[12]及Shapro-Wilk檢驗[13]后正態性檢驗分析結果顯示實物測量所得數據符合正太分布的要求,沒有明顯的差異性;表3配對t檢驗分析結果顯示PWM值配對轉速p值大于0.05時,說明兩組數據沒有顯著的相關性,即PWM值對電機轉速的控制性良好。綜上所述:本文所設計基于STC單片機的小型直流電機變頻調速控制器系統設計可實現直流電機的高線性度、符合正太數據分布的簡易操作、低成本控制,具有一定的應用價值。

表1 線性回歸分析結果(n=10)

表2 正態性檢驗分析結果
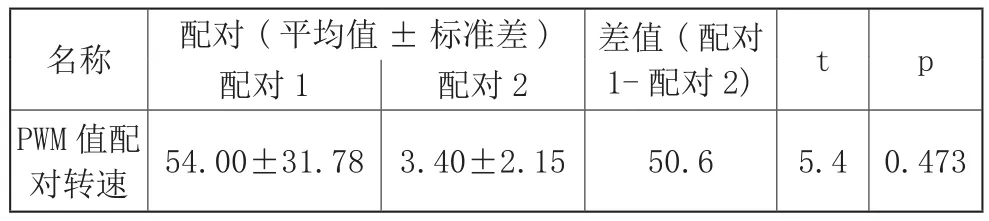
表3 配對t檢驗分析結果
4 總結
為拓展直流電機應用降低控制成本,本文基于STC單片機完成小型直流電機變頻調速控制器系統設計。在完成Proteus仿真的基礎上,本文完成變頻調速控制系統的硬件制作及軟件編程。系統硬件主要由主控制器、電機驅動、按鍵、液晶顯示及電機測速等部分組成,其中主控制器為STC單片機、電機驅動為L298,液晶顯示LCD1602、電機測速為霍爾傳感器。在完成上述系統硬件構建的基礎上對系統實物進行測試,測試數據分析結果顯示:PWM值與電機轉速的R2為0.993≈1即兩組數據的線性度很好,即通過調整PWM值可實現直流電機的線性調速;正態性檢驗分析結果顯示實物測量所得數據符合正太分布的要求,沒有明顯的差異性PWM值配對轉速p值大于0.05說明這兩組數據沒有顯著的相關性,即PWM值對電機轉速的控制性良好。綜上所述,本文所提系統具有成本較低、操作方便、線性度高、控制數據符合正太分布且性能良好,在低成本電機控制方面具有一定的應用前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
