一種用數字電路設計的水傳感器
2022-09-21 01:34:08俞建軍
電子測試 2022年17期
關鍵詞:信號
俞建軍
(浙江機電職業技術學院,浙江杭州,310053)
0 引言
市場上關于涉水檢測的方法及設備有多種,各有千秋,各有特定的應用場合[1]。論文介紹一種性能可靠,應用方便的水傳感器,這是一種用數字電路設計的水傳感器,具有報警器的功能,是一種能夠發出“嘩!嘩!嘩!”間斷聲的電路。
水傳感器中必須產生能夠使蜂鳴器發出聲音的振蕩聲,就是說必須能夠產生出人耳能夠聽得到的音頻,該音頻的頻率與RC振蕩器的頻率相同,RC振蕩器的阻容值與水聲“嘩”的音頻頻率匹配。
電路使用了兩個RC振蕩器來完成這種功能。一個是發出“嘩—”這種連續水聲的振蕩器,另一個是使聲音間斷的振蕩器。水傳感器可每隔0.5秒發出“嘩!嘩!嘩!”的聲音,是因為使聲音間斷的振蕩器每隔0.5秒發生一次“0”和“1”的交變輸出,由與非門將這兩個振蕩器的輸出混合,當與非門的一個輸入端為“1”時,它具有將另一個輸入反轉輸出的作用,所以每隔 0.5 秒重復“0”和“1”, 在“1”的期間發出“嘩”的聲音。
水傳感器的工作利用了水導電時的阻值。根據水的電阻與1MΩ下拉電阻的分壓比來決定是否發出聲音。該傳感器裝置采用3V電池作電源,當把傳感器探頭部分直接短路時,如果發出“嘩!嘩!嘩!”的聲音就表明制作成功。
1 水傳感器總體構成
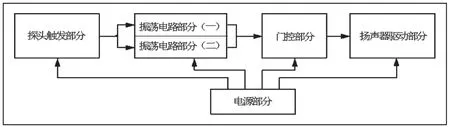
圖1 水傳感器總體框圖
所謂水傳感器就是當電路中的某一處布線被水的電阻值短接時,傳感器的蜂鳴器就會發聲報警。該水傳感器由以下五部分組成:探頭觸發部分,振蕩電路部分,門控部分,揚聲器驅動部分及電源部分等,圖中箭頭表示電源分布情況和信號流向。圖2是水傳感器的電路圖。使用的集成芯片是74HC00(4個2輸入的與非門),使用兩個這種集成芯片產生蜂鳴聲。電路結構中有基本的RC振蕩電路,振蕩信號通過的門電路,揚聲器驅動電路等。
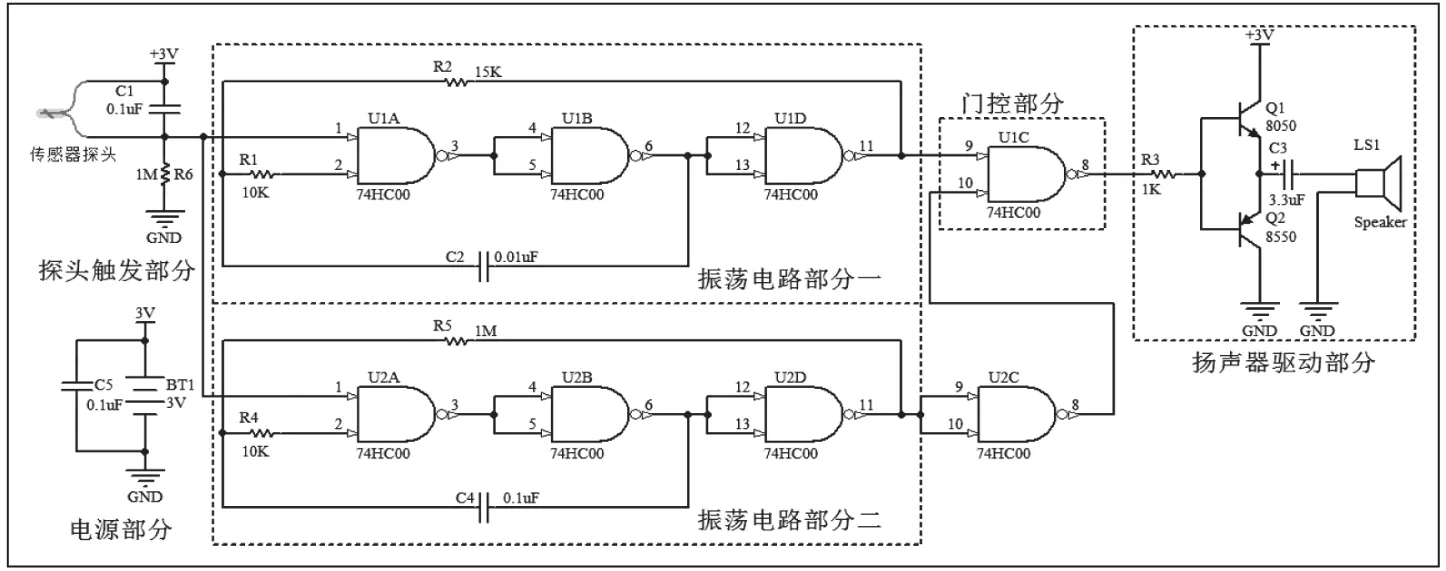
圖2 水傳感器的電路圖
2 水傳感器的具體電路設計
2.1 振蕩電路部分
圖2中,每個振蕩電路部分由3個2輸入與非門和2個電阻和及1個電容器組成,1個集成芯片74HC00包含4個2輸入與非門,拿出3個用于振蕩電路部分,第4個與非門用于門控部分,電源是2個串聯起來的1.5V電池,作為3V電源使用。
使用的數字芯片是有4個2輸入與非門的74HC00芯片,單個2輸入與非門的兩個引腳之間已經相互連接起來了,所以兩個輸入端輸入相同的信號,在動作上只產生“0”與“0”以及“1”與“1”的組合,這種情況下與非門的動作就是輸入的反轉,即與反相器的動作相同。若用3個反相器、兩個電阻及一個電容就可構成振蕩器電路,這種電路叫做RC振蕩電路,原始的RC振蕩電路由集成芯片74HC04反相器構成[2],見圖3。
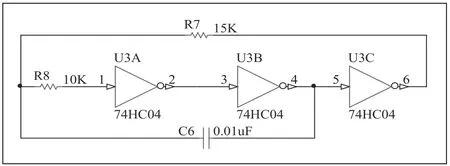
圖3 反相器74HC04構成的RC振蕩電路
圖2中,水傳感器共有兩個振蕩電路部分,分為振蕩電路部分(一)和振蕩電路部分(二),振蕩電路部分(一)由與非門U1A、U1B、U1D,電阻R1、R2及電容C2構成,U1B和U1D因兩輸入引腳短接,變成反相器,U1A是否變成反相器由其輸入引腳1決定,若引腳1是電平信號“1”,U1A的輸入引腳2和輸出引腳“3”邏輯“反相”,構成反相器,振蕩電路工作,若引腳1為電平信號“0”,振蕩電路部分被封鎖,不產生振蕩信號。與非門U1A的輸入引腳1接水傳感器的探頭,振蕩電路部分(一)是否振蕩工作由水傳感器的探頭信號決定。電阻R2并聯接在振蕩電路部分(一)的輸入和輸出之間,電阻R2和電容C2一起決定振蕩電路部分(一)的振蕩頻率,振蕩頻率為1/1.4R2C2,該頻率是水聲“嘩”的音頻頻率。電阻R1接在U1A的輸入引腳2,起限流保護作用。
圖2中,振蕩電路部分(二)由與非門U2A、U2B、U2D,電阻R4、R5及電容C4構成,其工作原理與振蕩電路部分(一)類似,其振蕩頻率由R5和C4決定,振蕩頻率為1/1.4R5C4,該頻率是水聲“嘩”間斷的頻率,該水聲間斷頻率遠小于水聲“嘩”的音頻頻率。
2.2 門控電路部分
圖2中,門控部分的作用是根據振蕩電路(二)變化的電平信號決定是否把振蕩電路(一)的振蕩信號輸出給揚聲器驅動部分,顧名思義,它具有門控的作用。2輸入與非門U1C構成門控部分,其輸入引腳9是振蕩電路部分(一)的振蕩信號,該信號是否輸出由輸入引腳10決定,若引腳10為高電平“1”則可輸出,若引腳10為低電平“0”則振蕩電路部分(一)的振蕩信號被封鎖,所以振蕩電路部分(一)的音頻信號通過門控部分的輸出將時斷時續。
圖2中,揚聲器驅動部分的作用是對通過門控的信號進行放大并且作為聲音能夠從揚聲器發出。由于數字集成芯片的輸岀只有“1”和“0”兩種,所以所謂放大就是強化這兩種狀態,通常用一對互補的三極管Q1和Q2來工作,Q1是NPN晶體三極管8050,Q2是PNP晶體三極管8550,該放大電路是一種對振蕩頻率交變信號的放大。LS1是功率約100mW,電阻約8~32Ω的小型揚聲器。
2.3 探頭觸發部分
圖2中,探頭觸發部分由電容C1,下拉電阻R6及傳感器探頭組成,如果探頭沒有接觸水,因下拉電阻的作用,與非門U1A和U2A的1號管腳為電平“0”,振蕩電路部分被封鎖,不振蕩;如果水傳感器的探頭沾水,發生短接現象,短接電阻和下拉電阻R6對3V電源分壓,分壓電平接入U1A和U2A的1號管腳,若探頭短接電阻的阻值小于下拉電阻R6的阻值(1MΩ),那么與非門U1A和U2A的1號管腳變為“1”,振蕩電路部分就開始振蕩。
2.4 低耗電設計
圖2中,電源部分采用由兩節1.5V干電池組成的電源,振蕩電路部分和揚聲器驅動部分平時在傳感器不涉水時不工作,整個電路只消耗極小的漏電路,只有在傳感器探頭沾水,電路振蕩報警時才消耗較大電流,該電路具有節電功能,電源部分待機使用時間較長。
2.5 傳感器探頭的制作
圖4是水傳感器探頭工作的原理,該探頭遇水即導通,產生分壓電阻,是一種導通傳感器,導通傳感器是檢測布線之間是否相互接觸的電路,工作原理很簡單,只是在布線接觸時將通常處于“0”(通過下拉電阻的地電位)的門電路的輸入變為“1”(電源電壓的+3V)就可以了。
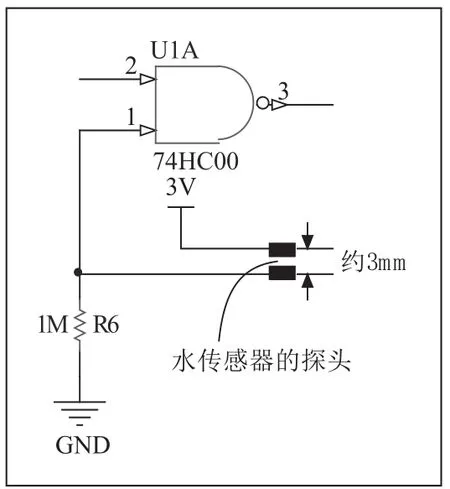
圖4 水傳感器探頭的工作原理
圖5是傳感器探頭的制作方法,在確認電路的正確動作之后,應制作相應的探頭,水傳感器探頭屬導通觸發類型,所以制作起來很方便。降雨傳感器探頭是在比較寬的基板(5cmX10cm)上刻岀叉指狀的電極條,這個傳感器探頭使用的基板的整個面上敷有一層銅箔,引線不能短路,也可以采用把銅箔貼在基板上的方法,電極的間隙約3mm。浴池水位檢測器的探頭是把兩根硬引線直接插到欲檢測的水面上,水位上來時,兩根接觸水的導線導通,兩根引線的前端裸露觸水部分是檢測水位的探頭。
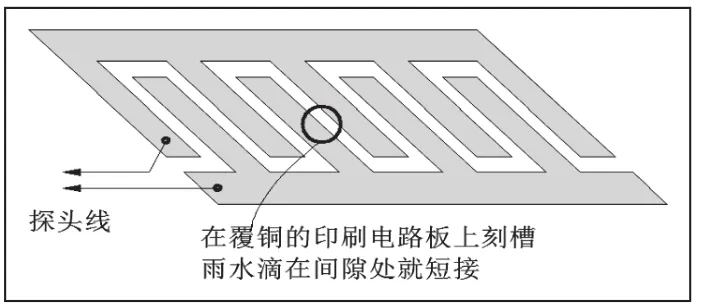
圖5 雨水傳感器探頭的制作方法
3 結論
水傳感器只使用了兩個數字集成芯片,所以部件的數目簡潔,應用方便。水傳感器采用2輸入與非門74HC00芯片是為了控制方便,一是可由與探頭相連的與非門來控制振蕩電路部分是否工作,二是可由門控部分的與非門來控制振蕩信號是否輸出。如果振蕩部分一直在工作著,就有電源提供的電流流過,所以我們要對原先由反相器構成的振蕩電路進行改良,使它兼有振蕩部分的功能和控制振蕩的功能,進行這個改良的目的是減少待機時(不發聲時)的電流。
水傳感器的振蕩電路部分,2輸入與非門U1A和U2A的兩個輸入引腳都沒有直接連接在一起,它是利用振蕩電路中的門U1A和U2A來控制振蕩部分的工作。與非門U1A和U2A的1號管腳是它的控制輸入,為“1”時振蕩,為“0”時停止。U1A和U2A的1號管腳接水傳感器的探頭,是否振蕩由探頭電平決定。振蕩停止(待機)時的電流基本上只是集成芯片的漏電流,所以圖2的電路作為水傳感器電路非常適合于待機狀態長的應用場合。
工業上使用的水位傳感器有多種,大多采用微機控制系統[3],汽車上也有各種涉水傳感器[4-5],有的可遠程報警,這些傳感器系統都較復雜,成本較高,安裝和使用需要一定的條件,論文介紹的水傳感器可檢測水的有無,簡便易用,耗電省,使用時間長,可作為降雨檢測器和浴池水位檢測器使用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
