基于增強現實技術的筒子紗印染鎖扣機器人運維巡檢系統研究
2022-09-22 14:29:04楊萬然徐朝月王維冠
紡織學報 2022年9期
吳 樂, 張 倩, 楊萬然, 徐朝月, 王維冠, 侯 曦
1. 北京機科國創輕量化科學研究院有限公司, 北京 100083; 2. 先進成形技術與裝備國家重點實驗室, 北京 100083; 3. 中國紡織機械協會, 北京 100028)
增強現實(AR)技術是應用多媒體、智能交互、傳感等多種技術手段,將現實與虛擬世界的信息完美結合的技術[1]。通過AR技術可將計算機生成的文字、圖像等虛擬信息模擬仿真后應用到真實世界中[2]。在傳統的設備及產線運維巡檢過程中,通過引入AR技術,可以實現巡檢過程可視化指導,巡檢數據可追溯,有效解決傳統人工巡檢過程中存在的巡檢記錄不完整、人工巡檢錯檢漏檢等問題,提高設備運維巡檢效率。AR技術已經在設備檢查維護、智能監控、遠程協作、員工培訓、作業指導等多個方面進行應用部署,其應用可以有效地提高工業設備及生產線的安全性[3-4]。
針對AR技術在運維巡檢中的應用,何智頻等[5]分析探討了AR技術在電力設備智能巡檢中的應用;李大勇等[6]研究了AR技術在變電站智能巡檢系統中的設計應用;何明等[7]分析了AR技術在配電站房巡檢業務中的應用;程新求等[8]分析了AR技術在燃氣行業中巡檢檢修應用;王琮皓等[9]分析了建筑信息模型(BIM)+AR技術在建筑運維管理中的應用。
本文基于AR技術,開展筒子紗印染關鍵機器人的運維巡檢系統研究,采用AR巡檢的方式,通過使用手持便攜式設備實現設備及產線的AR監控巡檢,方便巡檢人員及時觀測并發現設備運行中出現的異常和故障,確保設備及生產線的正常運轉,進一步為企業智能化轉型、大數據化轉型提供基礎服務。
1 運維巡檢系統分析
筒子紗印染數字化生產過程應用了多類多臺套機器人,配合完成各工藝單元任務,實現筒子紗染色生產的自動化,提高生產效率,保證產品品質。主要應用機器人包括自動裝卸紗機器人、高速脫水機器人、均勻烘干機器人、鎖扣機器人及前、后落紗機器人等。其中,鎖扣機器人是筒子紗染色生產線的關鍵機器人之一,通過自動裝卸鎖扣可解決大直徑高層紗籠人工裝卸鎖扣困難、勞動強度大的問題,避免人工操作對紗線的污染與損傷,同時進一步提供穩定的鎖扣鎖緊力,保證紗籠染色過程內外壓差,提升筒子紗染色質量與一次符樣率。
1.1 鎖扣機器人組成
鎖扣機器人主要由三坐標運動機構和裝卸手爪2部分組成,機器人單元主要由機器人、紗籠擺渡車和鎖扣緩存平臺2部分組成,如圖1所示。鎖扣機器人主要包括自動裝鎖扣和自動卸鎖扣2個工藝流程。

圖1 鎖扣機器人
1.2 巡檢需求分析
在鎖扣機器人工作過程中,傳統的人工巡檢方式已無法滿足生產現場需求,主要原因包括:1)無法直觀了解設備當前的任務狀態、生產工藝、運行參數等數據;2)當設備出現生產工藝、機械系統、電氣系統等故障時,部分故障原因無法進行有效排查;3)設備的生產進度、生產效率等數據不能快速統計;4)易出現巡檢記錄不完整、問題反饋不及時、錯檢漏檢等問題。
本文研究基于AR技術的智能運維巡檢系統可有效解決現有問題,巡檢人員可直觀了解設備運行實時狀態,快速記錄并反饋現場問題,及時排查設備故障原因并進行維修保養,有效地提高設備可靠性、穩定性,保證設備生產效率,實現巡檢過程有跡可循、巡檢結果全面直觀。
1.3 運維巡檢作業流程設計
鎖扣機器人智能巡檢作業流程主要包括:模型建立、場景加載、巡檢指令、巡檢數據上傳、巡檢數據分析、過程監控與記錄[10]。
1)模型建立。在鎖扣機器人巡檢過程中,根據筒子紗染色生產線安全通道及管理需求,建立鎖扣機器人位置模型,確定巡檢路線,確保巡檢人員安全問題;建立設備圖像識別模型,實現AR巡檢過程的自動識別。
2)場景加載。在顯示器端選擇巡檢場景,通過手持設備iPad,結合設備圖像識別模型識別巡檢設備對象,完成巡檢場景加載,實現巡檢設備的虛實同步顯示。
3)巡檢指令。在巡檢過程中,巡檢人員結合智能巡檢系統管理功能模塊以及巡檢路線流程,選擇不同巡檢指令,識別并查看相應的各類巡檢數據,進行設備狀態巡檢。
4)巡檢數據上傳。鎖扣機器人記錄巡檢過程中的問題,完成巡檢數據存儲與上傳。
5)巡檢數據分析。通過對鎖扣機器人巡檢過程中的各類數據進行分析處理,及時發現設備故障并進行處理,保證設備的穩定運行,提高設備的運行效率。
6)過程監控與記錄。通過AR巡檢的方式,實現鎖扣機器人設備巡檢過程的有跡可循、數據可追溯。
智能巡檢系統流程如圖2所示。
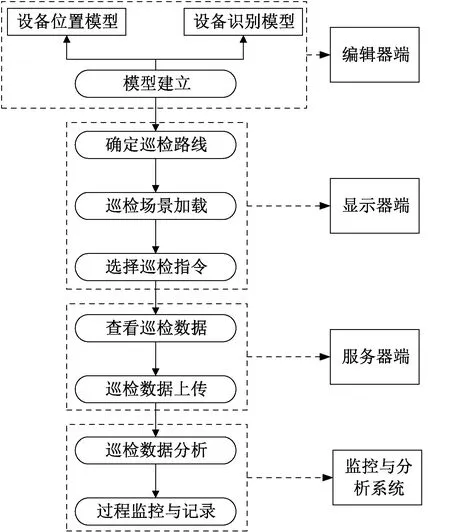
圖2 智能巡檢作業流程
2 運維巡檢系統方案設計
針對筒子紗印染關鍵機器人的運維巡檢需求,具體分析設備組成以及作業流程,開展包括設備狀態、運行參數、任務狀態、設備故障等運維巡檢數據模型研究,實現各類數據的采集、傳輸、分析與存儲,搭建基于AR技術的筒子紗印染關鍵機器人運維巡檢系統。
2.1 系統框架
針對設備運維巡檢的需求,本文以鎖扣機器人的設備運維為研究對象,設計基于AR技術的智能運維巡檢系統,主要包括設備層、數據層、模型層以及應用層等4個部分。系統研究框架如圖3所示。
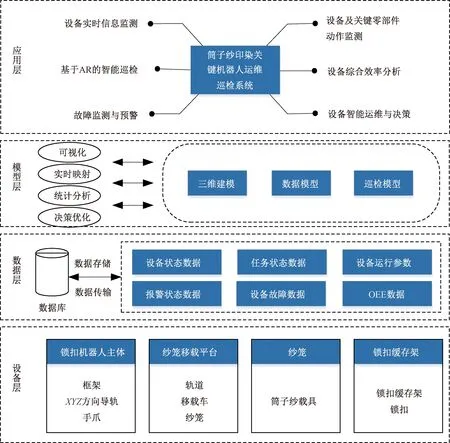
圖3 智能運維系統研究框架
1)設備層是運維巡檢系統的實體基礎,主要以鎖扣機器人主體、紗籠移載平臺、紗籠、鎖扣緩存架等關鍵部件為研究對象。
2)數據層主要針對鎖扣機器人的設備狀態、任務狀態、設備運行參數、報警狀態、設備故障、設備綜合效率(OEE)等各類數據進行采集、存儲與統計分析。
3)模型層是系統實現的核心,在三維模型以及數據模型構建的基礎上,結合設備工藝要求進一步構建設備運維巡檢模型。
4)應用層是系統面向用戶的功能服務。系統可實現設備實時信息監測、基于AR技術的智能巡檢、故障監測預警以及設備智能運維與決策等功能。
2.2 系統主要功能模塊
基于AR技術的運維巡檢系統主要功能包括:智能巡檢、實時監測與預警、虛實同步、桌面同步、培訓指導等[11]。
1)智能巡檢。巡檢人員可通過手持設備iPad實現設備及生產線的智能巡檢,后續可支持穿戴式AR眼鏡,實現解放雙手的巡檢方式。
2)實時監測預警。該系統可實現對設備及關鍵零部件的運行狀態、任務狀態、生產工藝等信息的實時監測,以及對設備的機械、電氣、工藝等各類數據的故障監測與預警功能。
3)虛實同步。采用AR技術構建文字、圖片、網站鏈接、三維模型、全景信息等虛擬世界與物理世界的虛實同步,實現數據的交互體驗,增強用戶體驗效果。
4)桌面同步。支持巡檢手持設備iPad與顯示屏之間的桌面同步,方便現場人員查看與監督指導。
5)培訓指導。巡檢人員可以快速直觀準確地了解設備運行相關狀態,對發生的設備故障進行快速判斷并進行維修指導,對可能發生的風險進行提前預警,同時對設備生產工藝、設備綜合效率(OEE)等數據進行快速掌握,可以輔助決策進一步提升生產效率。
2.3 數據模型與接口
1)數據模型建立。針對鎖扣機器人運維數據類型多樣、數據來源不同等問題,為方便快捷地獲取各類運維數據,具體分析鎖扣機器人生產過程關鍵要素,建立鎖扣機器人運維巡檢系統數據模型,如圖4所示。結合數據模型,具體分析需采集的數據類別、數據來源等信息,如表1所示。另外,OEE數據來源于PLC/數據庫。
2) 配置中心:用于管理微服務應用程序所需的配置參數,選用Spring Cloud Config實現,通過Spring Cloud Bus實現動態的配置更新。
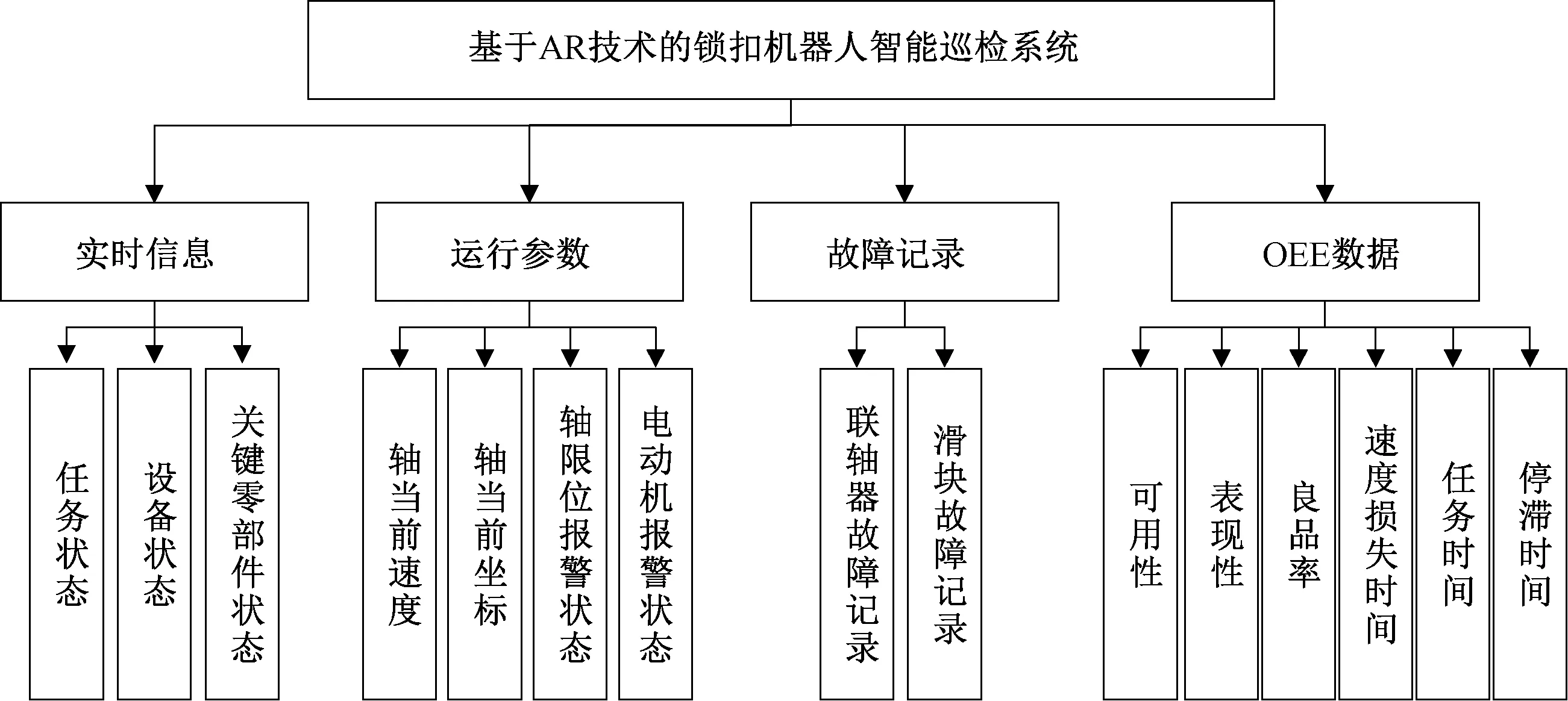
圖4 鎖扣機器人智能巡檢系統數據模型
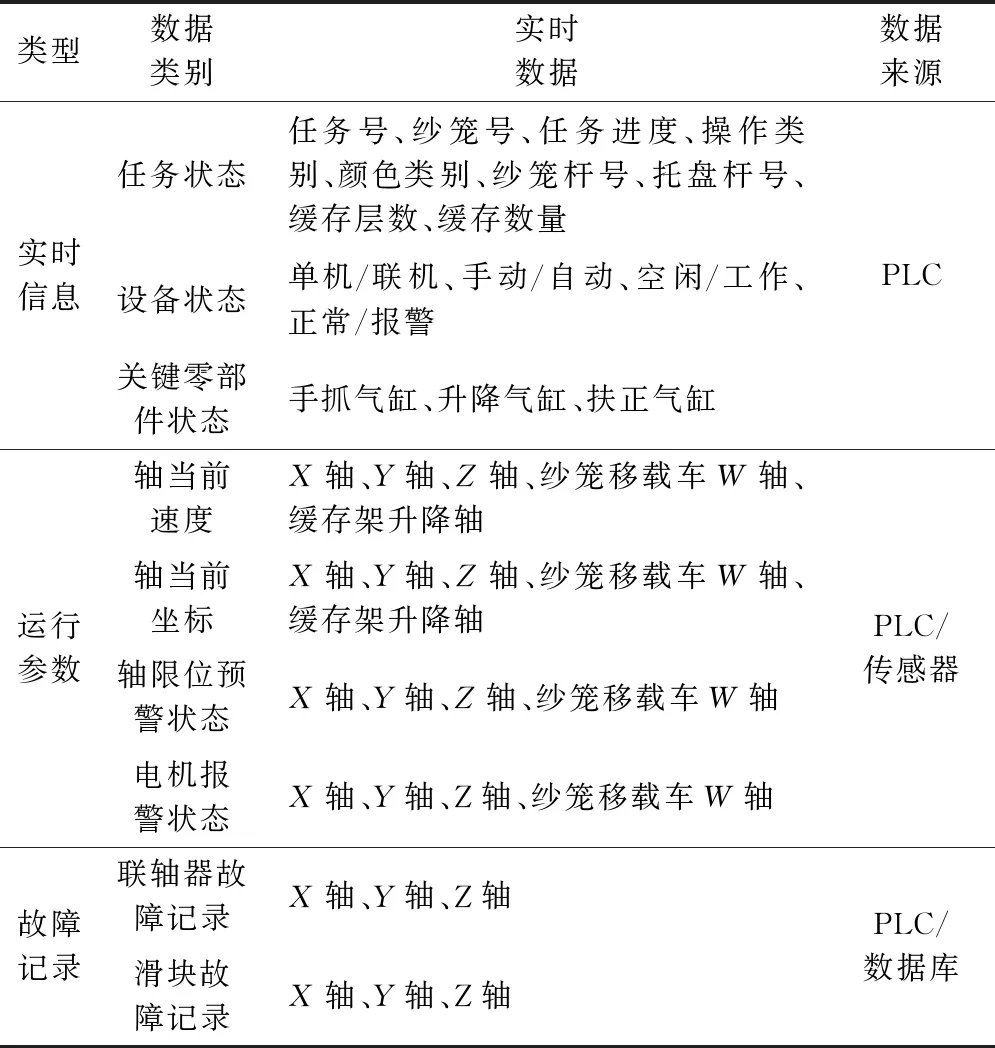
表1 數據類別及來源
2)通信接口設計。為實時準確地獲取鎖扣機器人運維巡檢數據,本文構建了鎖扣機器人運維巡檢系統數據通信架構,如圖5所示。
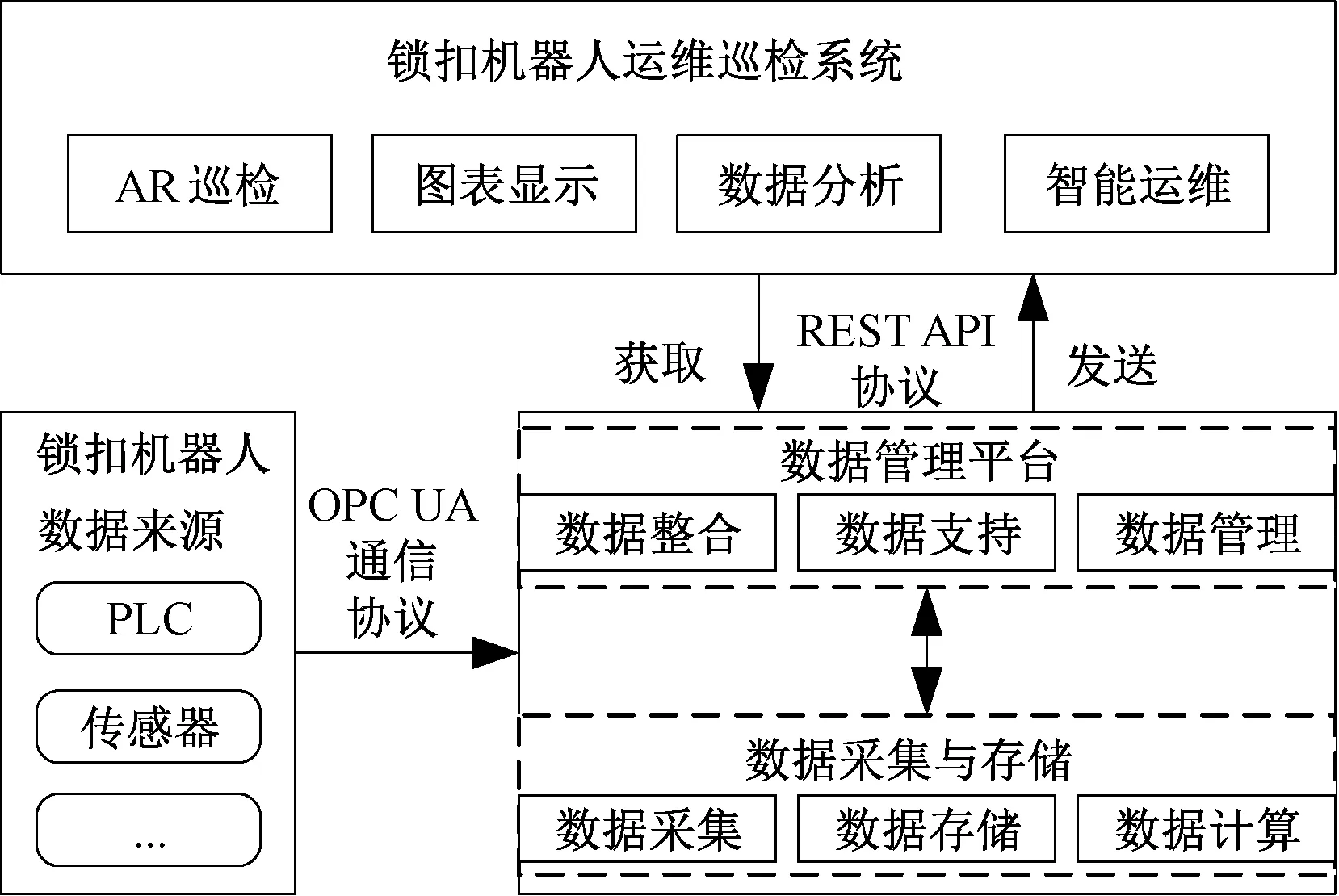
圖5 數據通信架構
鎖扣機器人運維巡檢數據來源于傳感器及可編程邏輯控制器(PLC)工控系統,采用OPC UA通信協議進行數據采集與傳輸[12],并存儲在Mysql數據庫;數據采集存儲系統與服務器數據管理平臺相交互,系統采用REST網絡接口,通過REST API(RESTful API)協議與鎖扣機器人運維巡檢系統實現設備運維數據實時傳輸。同時根據Django的ORM(object relational mapping)框架進行數據的增刪改查操作,以JSON(JavaScript object notation)數據格式輸出,實現客戶端和服務端的數據交互。
REST接口實現環境為:Python 3.6編譯環境,Django 2.2.1以上Web框架,PyCharm編譯器,MySQL 5.7.22以上版本數據庫。
3 運維巡檢系統開發及應用驗證
在巡檢系統架構、功能及數據模型等研究基礎上,以鎖扣機器人為對象,開發了具有設備數據實時監控、故障監測預警、設備綜合效率分析、智能運維與決策等功能的基于AR技術的鎖扣機器人運維巡檢系統。
3.1 鎖扣機器人巡檢系統組成
設備運維巡檢系統主要包含終端顯示系統、服務系統和編輯系統三大組成部分,如圖6所示。

圖6 鎖扣機器人巡檢系統組成
1)編輯器端。主要功能是進行場景的信息配置,包括場景創建、模型加載、模型渲染、界面編輯、工程管理及數據加載等功能。
2)顯示終端(手持iPad)。采用手持iPad進行巡檢作業,選擇巡檢場景,通過掃描設備二維碼自動識別巡檢對象,實現巡檢場景加載,通過巡檢指令選擇查看當前巡檢數據。
3)服務器端。服務器作為數據存放系統,主要實現數據上傳、信息查詢以及數據下載等功能。
3.2 系統配置要求
系統要求在個人計算機(PC)及其兼容機上,使用Windows操作系統,要求i7以上CPU,8 G以上內存,100 G以上硬盤,GTX1080以上顯卡;軟件播放器可使用iPad。
3.3 應用驗證
在編輯器端首先進行鎖扣機器人設備AR模型加載,通過solidworks軟件將設備三維模型保存為.STEP格式,采用PiXYZ軟件將.STEP格式轉換為.obj格式,并導入編輯器端;模型導入后可在場景窗口對模型進行查看與編輯,結合現場實際場景及位置信息,對模型的位置、方向等屬性進行調整。其次進行界面屬性編輯,包括運維巡檢界面的尺寸、位置、布局等,可在界面框中插入文字、按鈕、圖片、網頁、圖表等,并通過“添加組件”按鈕加載REST網絡接口,進行設備實時數據的監測與關聯。最后導入巡檢設備識別圖,完成鎖扣機器人巡檢場景設計及數據關聯,如圖7所示。

圖7 巡檢場景設計
顯示終端(手持iPad)應用程序通過在程序啟動界面的設置中配置服務器地址,配置完成后顯示編輯器中所配置的應用場景,通過選擇巡檢場景,掃描被巡檢設備的識別圖即可開始巡檢作業。顯示端巡檢場景選擇界面如圖8所示。
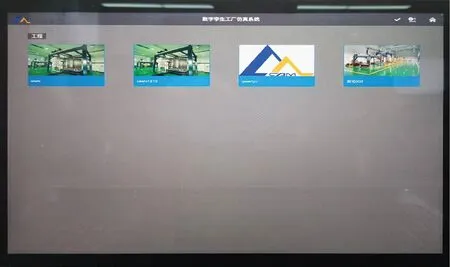
圖8 巡檢場景選擇
顯示終端(手持iPad)最終以AR形式展示鎖扣機器人的實際運動場景,同時以數字化形式展示設備實際運行過程中的實時監測數據,測試場景如圖9所示。具體展示包括設備狀態、運行參數、故障記錄、OEE數據等,部分界面如圖10所示。

圖9 系統測試場景
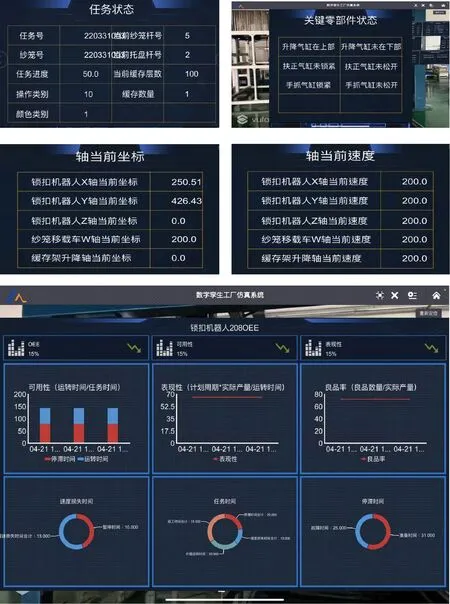
圖10 系統部分界面設計
通過現場應用驗證測試,該系統具有良好的測試效果,提高了設備維護便捷性。通過AR技術可直觀透明地顯示設備運行相關狀態,有效降低了維護難度,提高了生產效率,且保證生產質量;實現了設備運維安全管控,通過使用手持便攜式設備iPad,自動識別現場設備并展示設備狀態信息,實現巡檢人員在安全區域監測設備運行情況,避免人員進入高溫、帶電等危險區域,有效保證人員的安全問題。
4 結束語
本文研究的鎖扣機器人運維巡檢系統,有效解決了設備巡檢過程中存在的巡檢記錄不完整、現場問題反饋不及時、巡檢過程難以追蹤、巡檢結果不直觀、易出現錯檢漏檢等問題,幫助現場人員及時發現設備及產線的問題與故障,實現并驗證了AR運維巡檢系統在紡織行業產線設備的應用。
在鎖扣機器人設備巡檢的基礎上,未來將進一步開展車間級巡檢系統研發,開發基于增強現實技術的筒子紗染色車間智能巡檢系統,實現車間的直觀化、數字化監控巡檢,助力筒子紗印染生產高質量發展。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
電子制作(2018年11期)2018-08-04 03:26:08
光學精密工程(2016年6期)2016-11-07 09:07:19