角錐棱鏡相干合成激光器的自適應(yīng)驅(qū)動(dòng)方法
2022-09-22 06:41:06朱孟真曹海源譚朝勇
激光與紅外 2022年8期
關(guān)鍵詞:信號(hào)
初 華,萬(wàn) 強(qiáng),朱孟真,曹海源,黎 偉,譚朝勇
(陸軍工程大學(xué)軍械士官學(xué)校,湖北 武漢 430075)
1 引 言
高功率激光器在科學(xué)研究、工業(yè)加工和軍事武器等領(lǐng)域具有重要的應(yīng)用[1],而要實(shí)現(xiàn)高功率激光器,目前許多科研單位采用多路激光相干合成的方案[2-4]。為了保證激光器輸出能量最集中,避免能量損失,多路激光的同步是非常重要的。在實(shí)際應(yīng)用過程中,由于受到線路、電子元器件以及其他電磁干擾等因素的影響,要想做到多路激光的絕對(duì)同步是非常困難的[5]。在多路脈沖激光相干合成過程中,脈沖的同步延時(shí)控制精度和脈寬控制精度對(duì)合成光束能量分布具有重要影響[6]。多路激光驅(qū)動(dòng)延時(shí)造成激光不同步,會(huì)使激光能量不集中,峰值功率降低,效率降低。參考文獻(xiàn)[6]研究了脈沖控制精度對(duì)多光束組束的影響,當(dāng)單束激光延時(shí)達(dá)到10 %時(shí),峰值功率會(huì)降低13.73 %,脈寬增加10 %時(shí),峰值功率降低5.57 %[6]。我單位研究團(tuán)隊(duì)在參考文獻(xiàn)[5]的研究過程中,也發(fā)現(xiàn)當(dāng)2束激光不同步達(dá)到10 %時(shí),能量會(huì)降低15 %左右。因此,需要一種對(duì)多路激光進(jìn)行同步驅(qū)動(dòng)的裝置及方法,能夠?qū)す馄鞯尿?qū)動(dòng)進(jìn)行控制,并根據(jù)具體的應(yīng)用條件,自適應(yīng)地改變驅(qū)動(dòng)的延時(shí)及脈寬,實(shí)現(xiàn)最大的能量輸出。
基于角錐棱鏡的相干合成激光器利用角錐棱鏡的反射特性,即不管入射光線與其底面成何種角度入射,光線經(jīng)棱鏡的三個(gè)反射面依次全反射后,出射光線始終是反向平行于入射光線,并以錐頂呈中心對(duì)稱分布。利用角錐棱鏡,以互注入鎖相的方式實(shí)現(xiàn)多根激光介質(zhì)的相位鎖定,使得多路激光的頻率、相位、脈寬盡可能保持一致,從而實(shí)現(xiàn)高功率、高光束質(zhì)量的相干合成激光輸出[5]。但在實(shí)際應(yīng)用中,頻率、相位、脈寬不可能保證完全一致,傳統(tǒng)的方法是根據(jù)實(shí)驗(yàn)結(jié)果或經(jīng)驗(yàn)手動(dòng)改變各路激光的驅(qū)動(dòng)參數(shù),耗時(shí)耗力,且存在一定誤差,而采用自適應(yīng)的驅(qū)動(dòng)方法可以避免手動(dòng)調(diào)節(jié)的誤差輸入,且快速穩(wěn)定,大幅提高激光器的相干性,從而保證高功率、高光束質(zhì)量的輸出[7-9]。
2 激光器整體結(jié)構(gòu)
激光器的整體結(jié)構(gòu)圖如圖1所示,包括6根晶體棒以及與之對(duì)應(yīng)的泵浦源,每個(gè)泵浦源兩端均設(shè)置有驅(qū)動(dòng)電極,通過給兩個(gè)驅(qū)動(dòng)電極施加驅(qū)動(dòng)電流,使泵浦源發(fā)光,工作物質(zhì)受激產(chǎn)生激光。6路激光經(jīng)過角錐棱鏡互注入作用后,再經(jīng)過輸出鏡,形成諧振腔,從而產(chǎn)生6路激光輸出。6路激光分別進(jìn)入導(dǎo)光管的導(dǎo)光孔中,在各個(gè)導(dǎo)光孔內(nèi)均分別安裝濾光片和2個(gè)光電二極管,同時(shí)采集激光信號(hào),并轉(zhuǎn)換成電信號(hào)。采用2個(gè)光電二極管的優(yōu)點(diǎn)是,可以消除光電二極管的瞬態(tài)干擾,避免由于器件自身的差異造成信號(hào)采集不準(zhǔn)的問題。采集的光電信號(hào)經(jīng)過后續(xù)算法處理,并作為驅(qū)動(dòng)信號(hào)經(jīng)過電源隔離放大,最后重新作用于LD,形成光—電閉環(huán)。晶體棒采用Nd∶YAG增益介質(zhì),泵浦脈寬為450 μs,波長(zhǎng)為808 nm,為提高6路激光的合成功率,采用聚焦透鏡在遠(yuǎn)場(chǎng)匯聚。
我團(tuán)隊(duì)曾經(jīng)發(fā)表的文章[10]可使峰值功率更高,其結(jié)構(gòu)如圖2所示。與圖1相比,6路激光可將一路激光采用電光調(diào)Q實(shí)現(xiàn)納秒激光輸出,再作為種子光注入到另外5路激光中,種子光通過角錐棱鏡之后注入到對(duì)稱一路的激光晶體中實(shí)現(xiàn)一次放大,通過角錐棱鏡和兩個(gè)角隅棱鏡實(shí)現(xiàn)6路激光的自準(zhǔn)直自約束放大。由于電光調(diào)Q實(shí)現(xiàn)了納秒激光輸出,不需要再通過聚焦透鏡也能實(shí)現(xiàn)較高的遠(yuǎn)場(chǎng)峰值功率。但存在一個(gè)問題,如果6路激光不同步,不能做到如圖1所示的光—電閉環(huán),因?yàn)殡姽庹{(diào)Q后為納秒激光,在光電采集時(shí),就需要更高數(shù)量級(jí)的光電轉(zhuǎn)換器件,并且后續(xù)對(duì)電信號(hào)的處理要求精度會(huì)更高,很難做到閉環(huán)控制。圖1所示的結(jié)構(gòu),直接采集增益介質(zhì)的泵浦光,光脈寬在450 μs,如果6路激光不能完全同步時(shí),可以引入閉環(huán)控制,在電路控制上更容易實(shí)現(xiàn),更能做到自適應(yīng)驅(qū)動(dòng)。
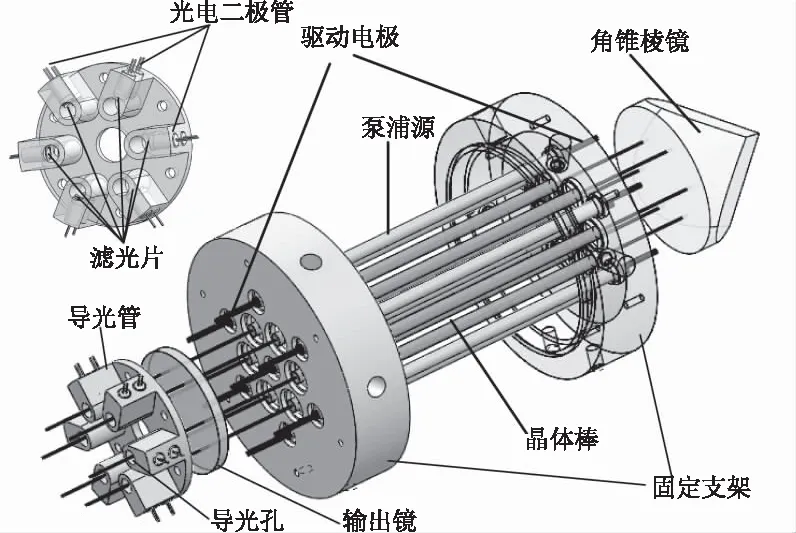
圖1 激光器結(jié)構(gòu)圖
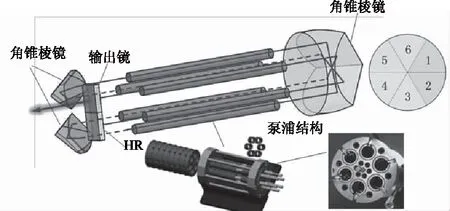
圖2 對(duì)比激光器結(jié)構(gòu)圖
3 原理分析
在此之前,多路激光相干合成采用開環(huán)驅(qū)動(dòng)的控制方法,即6路驅(qū)動(dòng)脈沖作用于激光器電源,激光器電源經(jīng)過隔離放大后作用于LD模塊產(chǎn)生激光,激光經(jīng)過角錐棱鏡多次振蕩后產(chǎn)生相干光,從給定驅(qū)動(dòng)脈沖到產(chǎn)生激光,整個(gè)系統(tǒng)一直處于開環(huán)狀態(tài),經(jīng)過了線路和電子元器件后,從同步的6路電脈沖到產(chǎn)生6路激光,其中引入了眾多不確定因素,最終導(dǎo)致光信號(hào)不同步。不同步的延時(shí)程度可能達(dá)到30~50 μs,具體數(shù)據(jù)參見實(shí)驗(yàn)部分。
3.1 不同步原因分析
針對(duì)圖1所示的激光器,分析6路激光可能不同步的原因有:
(1)電磁干擾。LD的驅(qū)動(dòng)電壓為350 V,6路LD需要6個(gè)激光器電源,激光器電源制造工藝不同,驅(qū)動(dòng)LD時(shí)便不能做到完全同步,并且350 V電壓大多采用開關(guān)電源產(chǎn)生,其噪聲很大,容易產(chǎn)生很強(qiáng)的電磁干擾。如圖3所示,為高壓探筆測(cè)得的負(fù)載LD上的電壓波形,有2個(gè)方面會(huì)影響同步:一是驅(qū)動(dòng)電壓的上升沿,二是驅(qū)動(dòng)電壓的波動(dòng)。明顯看到,加在LD上的電壓受到干擾,其上升沿和電壓波動(dòng)都很明顯,極易造成多路激光的不同步。
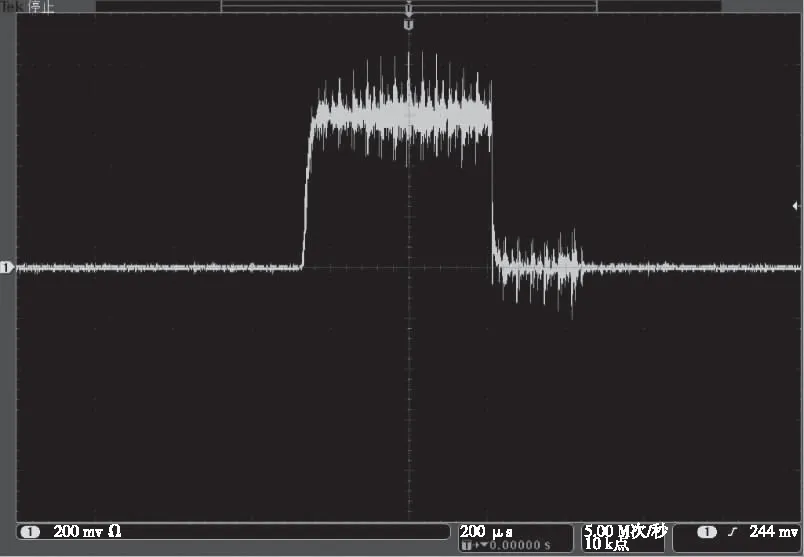
圖3 驅(qū)動(dòng)電壓波形
(2)電路延時(shí)。電路延時(shí)包含同步的驅(qū)動(dòng)信號(hào)經(jīng)過電源的隔離放大后再作用于LD所經(jīng)過的所有電子電路。6路同步驅(qū)動(dòng)信號(hào)為弱電信號(hào),多為TTL電平或者帶有一定驅(qū)動(dòng)能力的5~12 V電平,經(jīng)過隔離放大后,作為L(zhǎng)D電源的驅(qū)動(dòng)信號(hào),雖然驅(qū)動(dòng)信號(hào)能夠保證同步,但是經(jīng)過電路后,由于采用不同的電路元件,電路延時(shí)也會(huì)不同。如圖4所示,為典型的驅(qū)動(dòng)信號(hào)經(jīng)過的電路示意圖,驅(qū)動(dòng)信號(hào)經(jīng)過光電隔離、比較器、運(yùn)算放大器后,經(jīng)過IGBT開關(guān)器件,將高壓作用于LD上,期間經(jīng)過的電子元器件均會(huì)有電路延時(shí),對(duì)比450 μs的泵浦脈寬是不能忽視的,因此會(huì)產(chǎn)生不同步。
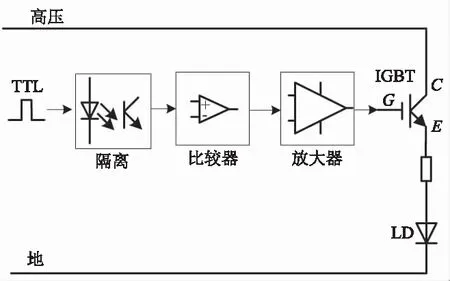
圖4 驅(qū)動(dòng)電路示意圖
(3)打火放電。圖5所示為核心器件的實(shí)物圖。為了適應(yīng)角錐棱鏡的尺寸,6路LD和晶體棒以及水冷管路排列得相當(dāng)緊湊,電極與周圍金屬容易出現(xiàn)打火放電的現(xiàn)象,容易造成多路激光中的某一路或幾路不同步。雖然可通過加強(qiáng)絕緣(圖示絕緣膠帶)等措施,但6路均為400 V左右的高壓是無(wú)法避免的,電極間、電線間還是會(huì)出現(xiàn)“打火”的現(xiàn)象,造成多路激光的不同步。
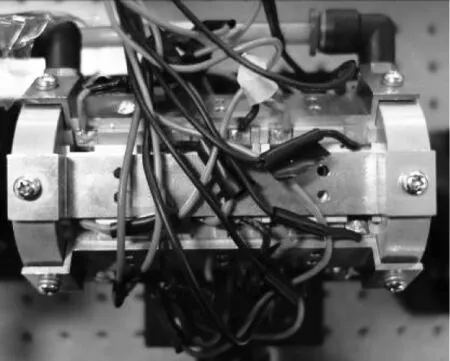
圖5 核心器件實(shí)物圖
3.2 合成效率分析
圖1所示的角錐棱鏡相干合成激光器滿足相干合成的條件,即波長(zhǎng)一致、偏振相同、相位一致,通過聚焦透鏡可在遠(yuǎn)場(chǎng)處以相互干涉的方式疊加[9]。雖然不需要進(jìn)行參數(shù)調(diào)節(jié),但是存在上述不同步的問題,無(wú)法在同一時(shí)刻到達(dá)合成位置,甚至于由于存在線路、器件等延時(shí),雖然驅(qū)動(dòng)LD泵浦時(shí)的驅(qū)動(dòng)脈沖同步,但是激光脈沖并不一定同步,這樣在遠(yuǎn)場(chǎng)處,本應(yīng)同步的6路激光,相互之間的時(shí)間間隔偏差很大,使合成效率降低,如圖6所示。針對(duì)以上分析,需要解決的主要問題是采取合適的手段,使得六路激光器輸出的脈沖激光能夠在同一時(shí)刻到達(dá)遠(yuǎn)場(chǎng),即時(shí)間上同步,如圖7所示。圖6所示的光脈沖輸出,時(shí)間不同步,兩束脈沖激光時(shí)間上重合部分僅為圖中所示的陰影部分,雖然光束1和光束2分別到達(dá)同一空間位置時(shí)的波長(zhǎng)、偏振和相位差都滿足相干條件,但是因?yàn)槊}沖在時(shí)序上無(wú)法有效重疊,不能實(shí)現(xiàn)較好的相干合成效果,此時(shí)的合成效率不高。圖7所示,當(dāng)2束激光完全同步時(shí),光脈沖能夠在同一時(shí)刻達(dá)到同一空間位置,在整個(gè)光脈沖寬度的時(shí)間內(nèi)都能重合,合成效率可以達(dá)到最高。此同步非傳統(tǒng)意義上的相位同步,而是多束激光同時(shí)達(dá)到相干區(qū)域,此時(shí)合成效果為最理想狀態(tài)。這樣就解決了由于線路、器件延時(shí)或者電磁干擾等造成多路激光在遠(yuǎn)場(chǎng)不同步的問題,提高合成效率。
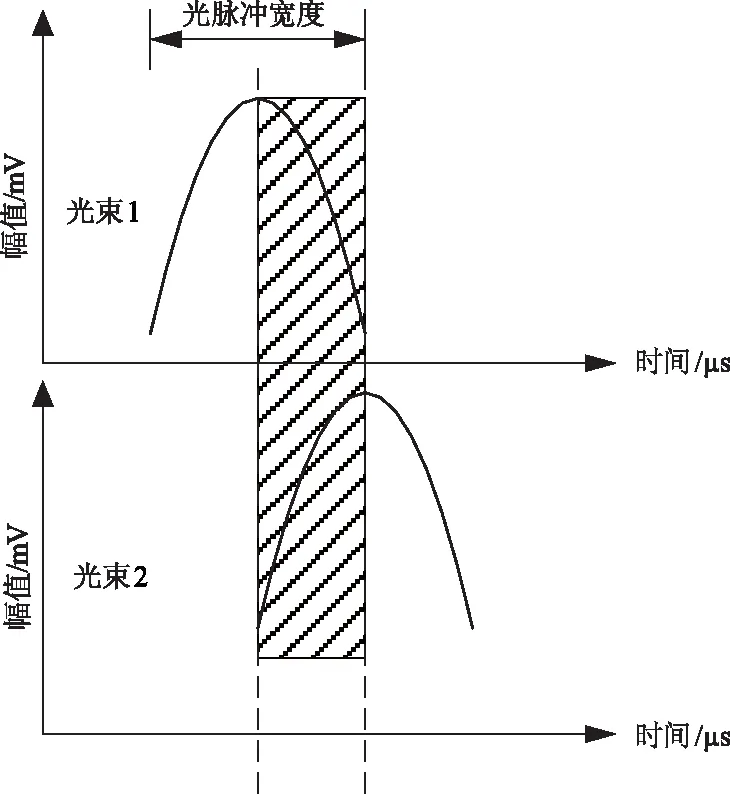
圖6 不同步的2束光合成區(qū)域
3.3 系統(tǒng)設(shè)計(jì)
通過分析6路激光不同步的原因,提出一種自適應(yīng)的驅(qū)動(dòng)方法,系統(tǒng)原理圖如圖8所示。其核心為采集6路激光的時(shí)序,計(jì)算其不同步的時(shí)間差,經(jīng)過算法處理,補(bǔ)償不同步的時(shí)間,形成光—電閉環(huán)。以固定頻率工作的激光器,在單次脈沖時(shí)采集激光信號(hào)并轉(zhuǎn)換成電信號(hào),轉(zhuǎn)換后的電信號(hào)經(jīng)過運(yùn)算放大器的隔離、放大處理后,輸入比較器,產(chǎn)生標(biāo)準(zhǔn)的方波信號(hào),最后輸入到處理器做算法處理,算法處理后產(chǎn)生驅(qū)動(dòng)信號(hào),經(jīng)過激光器驅(qū)動(dòng)電源后作用于LD晶體,產(chǎn)生激光。雖然一次運(yùn)算并不能保證使6路激光完全同步,但是系統(tǒng)一直處于閉環(huán)工作中,適時(shí)地、不停地動(dòng)態(tài)調(diào)整,足以保證6路激光能在可接受的同步范圍內(nèi)工作,提高了合成效率,且抗干擾性強(qiáng),不需要人工頻繁調(diào)整驅(qū)動(dòng)參數(shù),實(shí)現(xiàn)自適應(yīng)驅(qū)動(dòng)。
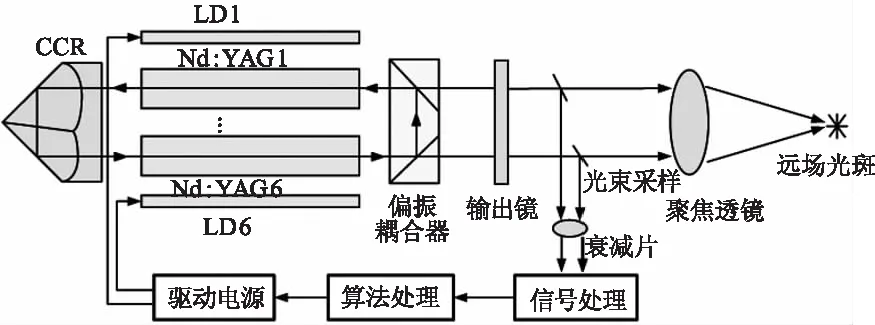
圖8 系統(tǒng)原理圖
4 自適應(yīng)驅(qū)動(dòng)方法
圖9所示為自適應(yīng)驅(qū)動(dòng)的流程圖,整個(gè)過程為光—電閉環(huán),以解決6路激光不同步的問題,使光束在相干合成遠(yuǎn)場(chǎng)區(qū)域合成效率更高。步驟1,通過光電轉(zhuǎn)換器件將光信號(hào)轉(zhuǎn)換成電信號(hào)。步驟2,將光信號(hào)轉(zhuǎn)換成的電信號(hào)進(jìn)行信號(hào)處理,包括利用比較器濾波,利用運(yùn)放將信號(hào)放大。步驟3,將處理完的信號(hào)送給CPU作算法處理。步驟4,經(jīng)過補(bǔ)償后的驅(qū)動(dòng)信號(hào)送給LD驅(qū)動(dòng)電源。步驟5,驅(qū)動(dòng)電源驅(qū)動(dòng)LD泵浦產(chǎn)生激光。
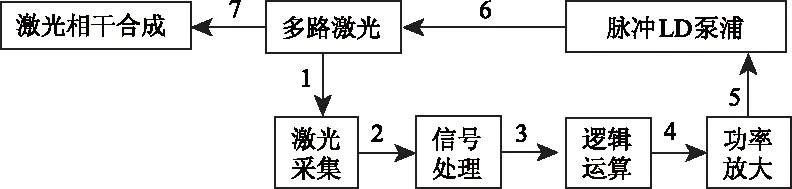
圖9 自適應(yīng)驅(qū)動(dòng)流程圖
算法采用數(shù)字增量式PID控制算法,其控制器的結(jié)構(gòu)框圖如圖10所示。為簡(jiǎn)化論述過程,以2束光為例,其中任意一束光定為基準(zhǔn)光,另一束光定為修正光,6路激光的控制與此相同。
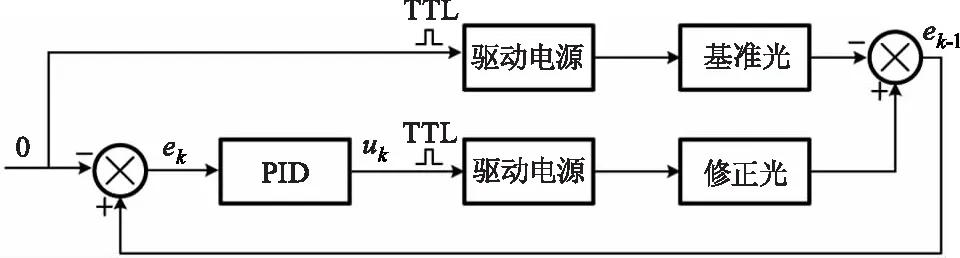
圖10 控制器的結(jié)構(gòu)框圖
增量式PID控制可用下式表示:
(1)
其中,A=kp+ki+kd;B=kp+2kd;C=kd;ek為修正光與參考光的時(shí)間差;uk為經(jīng)過PID算法后的控制量。通過PID算法不斷修正2束光之間的時(shí)間差,直到達(dá)到0時(shí)間差,即可滿足同步要求。PID參數(shù)整定方法為:
(2)
其中,Ts為采樣周期,也是就激光器的工作頻率;Ti為積分時(shí)間;Ts為微分時(shí)間。去掉微分和積分環(huán)節(jié),只保留比例環(huán)節(jié),增大kp,直到系統(tǒng)出現(xiàn)振蕩,記下此時(shí)的比例系數(shù),記為k,采樣周期Ts,振蕩周期Tk,則整定的參數(shù)為:kp=1.7k,Ti=0.5Tk,Td=0.125Tk,帶入式(2),可計(jì)算PID參數(shù)。
值得一提的是,經(jīng)過PID計(jì)算后的驅(qū)動(dòng)信號(hào)經(jīng)過激光器電源后作用于LD,產(chǎn)生激光,完成一次循環(huán)。由于一次循環(huán)的時(shí)間是由激光器的工作頻率決定的,激光器工作頻率范圍為1~10 Hz,激光器工作一次的時(shí)間內(nèi),并不一定能夠完全補(bǔ)償6路激光的時(shí)間差,所以,經(jīng)過多次閉環(huán)驅(qū)動(dòng)調(diào)節(jié),會(huì)逐漸減少6路激光的時(shí)間差,實(shí)現(xiàn)自適應(yīng)驅(qū)動(dòng)控制。
5 實(shí) 驗(yàn)
圖11為我團(tuán)隊(duì)發(fā)表的參考文獻(xiàn)[10]的電脈寬和光脈寬圖,其激光器采用本文圖2所示的結(jié)構(gòu),從圖中可以看出,電脈沖作用于LD再到出光,存在不同步的現(xiàn)象,因此本文采用圖1所示的結(jié)構(gòu),通過引入閉環(huán)反饋,使6路激光同步。
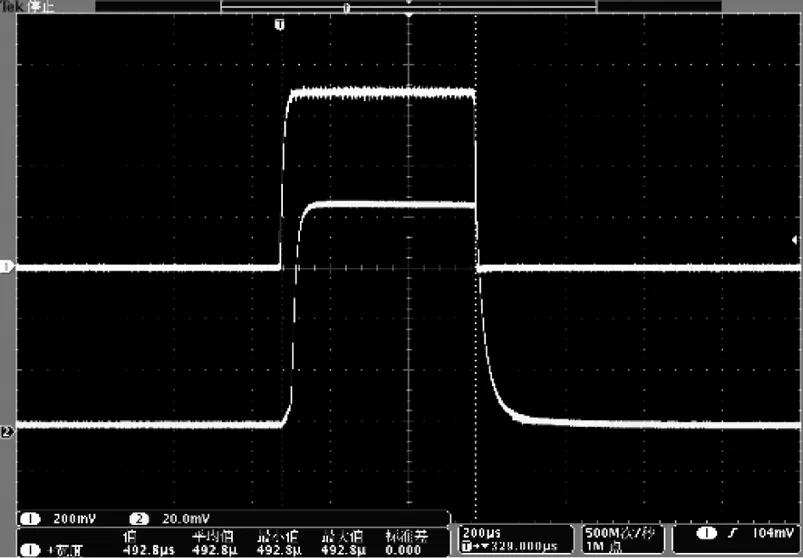
圖11 電脈寬和光脈寬圖
實(shí)驗(yàn)如圖12所示,由于6路LD排列緊密,測(cè)量其中兩路LD的時(shí)序時(shí),光電探頭不足以區(qū)分開2路光束,故實(shí)驗(yàn)時(shí)用分光鏡將2路光分成90°,同時(shí)采集并輸入到示波器中。
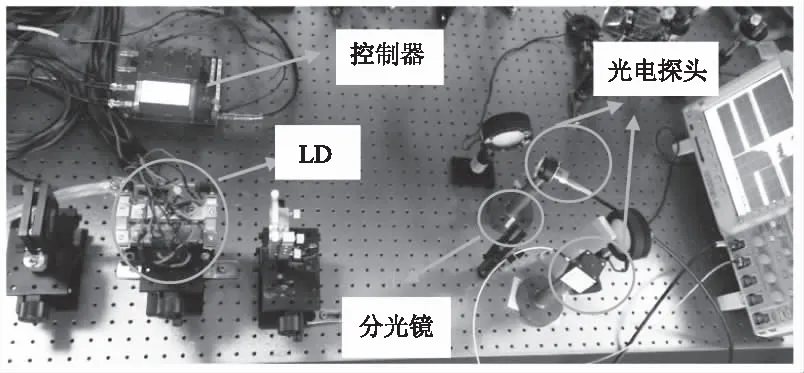
圖12 實(shí)驗(yàn)測(cè)試
圖13、圖14分別是未經(jīng)過自適應(yīng)調(diào)節(jié)的2路激光和經(jīng)過自適應(yīng)驅(qū)動(dòng)調(diào)節(jié)后的2路激光。圖13為兩路激光不同步時(shí)延時(shí)為35 μs,驅(qū)動(dòng)電流為70 A,脈寬500 μs時(shí)測(cè)得能量為0.98 J,圖14為兩路激光自適應(yīng)同步時(shí),驅(qū)動(dòng)電流為70 A,脈寬500 μs時(shí)測(cè)得能量為1.09 J,效率提升11 %。由于所用的激光器為長(zhǎng)脈沖激光器,脈寬為500 μs,不同步時(shí)延時(shí)為35 μs,相對(duì)于500 μs脈寬而言,不同步問題對(duì)激光器輸出能量影響不大,如果是100~200 μs的短脈沖,或者經(jīng)過調(diào)Q輸出后的納秒級(jí)激光,該自適應(yīng)驅(qū)動(dòng)方法將會(huì)顯著提高能量輸出。
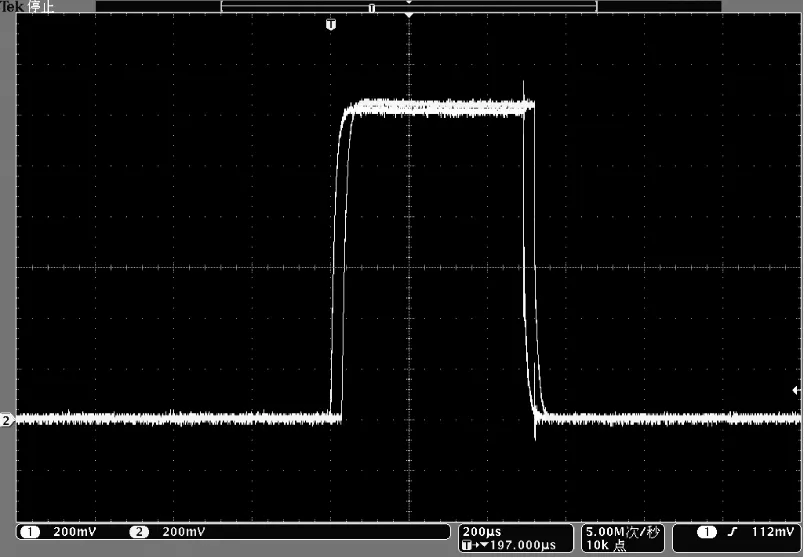
圖13 不同步的2束激光
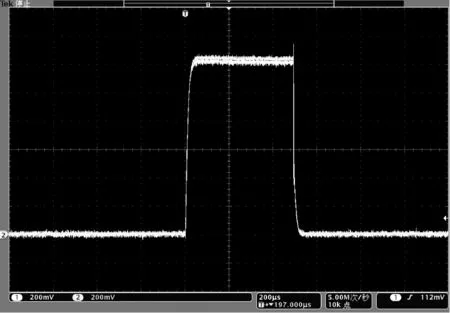
圖14 同步狀態(tài)下2束光
6 小 結(jié)
針對(duì)角錐棱鏡相干合成激光器存在遠(yuǎn)場(chǎng)合成效率不高的問題,分析多路激光不同步是其根本原因,采用自適應(yīng)驅(qū)動(dòng)方法,可以補(bǔ)償多路激光由于線路、器件以及其他電磁干擾等因素造成的不同步問題,提高激光器的相干合成效率。同時(shí),由于是自適應(yīng)閉環(huán)驅(qū)動(dòng),避免人工調(diào)整參數(shù)帶來(lái)的誤差,提高了激光器的穩(wěn)定性和工作效率。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06
