四旋翼飛行器飛行姿態(tài)的自抗擾控制研究
2022-09-23 01:39:44陳昊晟
電子制作 2022年16期
關(guān)鍵詞:模型
陳昊晟
(華北水利水電大學(xué),河南鄭州,450045)
0 引言
四旋翼飛行器由四個(gè)對稱的電機(jī)和螺旋槳構(gòu)成,其通過對四個(gè)動(dòng)力組旋翼轉(zhuǎn)速的調(diào)節(jié)完成垂直起降、水平飛行、懸停、俯仰、偏航等一系列動(dòng)作[1]。近年來,因?yàn)樗男盹w行器具有飛行平穩(wěn)、機(jī)動(dòng)性能卓越、維護(hù)成本較低、易微型化等優(yōu)點(diǎn),已在軍事和生活等多個(gè)領(lǐng)域得到了廣泛應(yīng)用。
四旋翼飛行器具有非線性、強(qiáng)耦合、多變量的特點(diǎn),是一種四輸入六狀態(tài)輸出的欠驅(qū)動(dòng)系統(tǒng)[2],然而飛行器控制系統(tǒng)易受各種外界因素的干擾,如:本身載荷、形狀大小、模型準(zhǔn)確性等。故推出四旋翼飛行器在具有不確定干擾情況下的穩(wěn)定控制系統(tǒng)是研究其姿態(tài)控制問題的重點(diǎn)。國際上對其姿態(tài)控制器進(jìn)行了一定的深入研究,主要的控制方法有經(jīng)典PID算法、自適應(yīng)控制、反步法、滑模控制等。但PID控制調(diào)節(jié)時(shí)間長,不容易滿足高性能要求;自適應(yīng)控制、反步法、滑模控制屬于非線性控制,對模型的精確度要求比較高,而模型參數(shù)的獲取由于各種因素的干擾不可避免地會(huì)存在誤差,在實(shí)際應(yīng)用的過程中,控制性能和抗干擾效果均有一定的減弱。
文獻(xiàn)[3]采用一種基于自耦PID控制器的四旋翼飛行器姿態(tài)回路控制方法。文獻(xiàn)[4]提出了一種基于自適應(yīng)反步法的補(bǔ)償控制策略,所設(shè)計(jì)的控制器即使在集總干擾存在的情況下,也能保證跟蹤誤差的瞬態(tài)性能。文獻(xiàn)[5]設(shè)計(jì)了一種內(nèi)外環(huán)控制算法,內(nèi)環(huán)采用自抗擾控制器,外環(huán)采用非奇異終端滑模控制器提高系統(tǒng)的響應(yīng)速度。文獻(xiàn)[6]利用有限時(shí)間控制理論,提出了一種四旋翼飛行器快速姿態(tài)跟蹤控制算法,可以在有限時(shí)間內(nèi)達(dá)到預(yù)期姿態(tài)。
本文為有效地提高飛行器對外界不確定干擾因素的適應(yīng)能力,建立了關(guān)于四旋翼飛行器的簡化動(dòng)力學(xué)模型,采用一種基于自抗擾控制的四旋翼飛行器姿態(tài)控制方法,在控制過程中通過產(chǎn)生所期望的姿態(tài)角度,進(jìn)而達(dá)到姿態(tài)控制這一目的,研究設(shè)計(jì)得到的自抗擾控制算法對于四旋翼飛行器姿態(tài)的控制具有不依賴于模型參數(shù)精度和較強(qiáng)的魯棒性、穩(wěn)定性等優(yōu)點(diǎn),能對飛行器進(jìn)行精確實(shí)時(shí)控制。最終通過仿真實(shí)驗(yàn)結(jié)果驗(yàn)證了本文控制方法的有效性。
1 四旋翼飛行器動(dòng)力學(xué)模型的建立
四旋翼飛行器一般有兩種模式,分別為“十”字形模式和X形模式[7],本文以X形模式飛行器為例進(jìn)行分析。
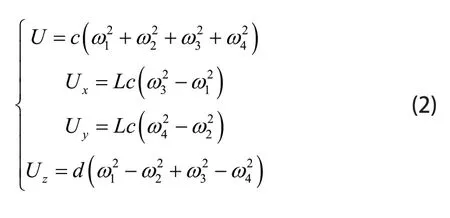
首先,為了獲得四旋翼飛行器控制系統(tǒng)的數(shù)學(xué)模型,分別建立慣性坐標(biāo)系E[OXYZ]和機(jī)體坐標(biāo)系B[oxyz],如圖1所示。定義ψ、θ、φ分別為偏航角、俯仰角、滾轉(zhuǎn)角[8],m為四旋翼機(jī)體的質(zhì)量,g為重力加速度,c為升力系數(shù),d為反扭矩系數(shù),ωj(j=1、2、3、4)為第j個(gè)螺旋槳的轉(zhuǎn)速,U為四旋翼飛行器產(chǎn)生的總升力,Ux、Uy、Uz分別為飛行器在x、y、z軸上所受到的力矩,Ix、Iy、Iz對應(yīng)飛行器繞x、y、z三個(gè)坐標(biāo)軸的轉(zhuǎn)動(dòng)慣量,L為旋翼中心到機(jī)體質(zhì)心的距離。
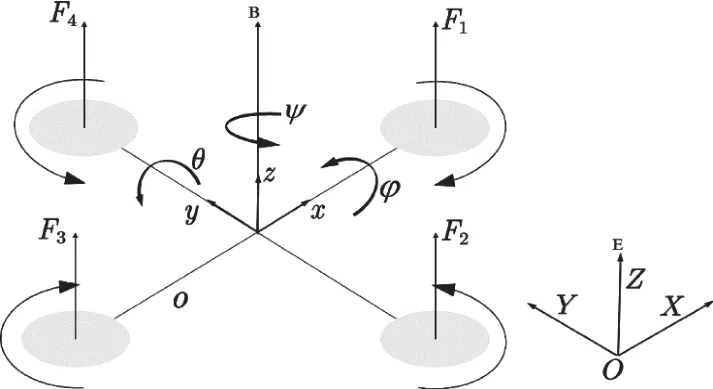
圖1 四旋翼飛行器的坐標(biāo)系
為了簡化模型,假設(shè)四旋翼飛行器為質(zhì)量不變且重心不發(fā)生變化的剛體,在室內(nèi)或室外無風(fēng)及慢速飛行的條件下,忽略阻力等其他外界干擾。基于上述假設(shè)條件,利用牛頓第二定律和歐拉方程可得出小角度姿態(tài)變化情況下四旋翼飛行器的動(dòng)力學(xué)數(shù)學(xué)模型為:

其中:
2 自抗擾控制器研究
觀察四旋翼飛行器的數(shù)學(xué)模型可知,無法得到一個(gè)四旋翼的精確數(shù)學(xué)模型。其姿態(tài)控制系統(tǒng)關(guān)于運(yùn)動(dòng)模型的參數(shù)存在不確定性,為有效提升四旋翼飛行姿態(tài)的穩(wěn)定控制,本文采用自抗擾技術(shù)設(shè)計(jì)四旋翼飛行姿態(tài)的跟蹤控制器。
自抗擾控制技術(shù)不依賴被控對象的精確模型,把所有作用于被控對象的不確定外擾因素作用都?xì)w結(jié)為未知擾動(dòng),并用對象的輸入輸出數(shù)據(jù)對其進(jìn)行估計(jì)和補(bǔ)償,在要求實(shí)現(xiàn)高速高精度的場合能很好地體現(xiàn)其優(yōu)越的控制性能,自抗擾控制器主要包括以下三個(gè)部分:跟蹤微分器(TD)、非線性狀態(tài)誤差反饋律(NLSEF)、擴(kuò)張狀態(tài)觀測器(ESO)[9],其結(jié)構(gòu)框圖如圖2所示。

圖2 自抗擾控制器結(jié)構(gòu)圖
TD根據(jù)設(shè)定值來安排過渡過程,提取被控對象的微分信號,在提取微分的同時(shí),也盡可能地減少運(yùn)算過程中引入的噪聲,這樣有利于得到較高精度的微分信號;ESO實(shí)時(shí)估計(jì)被控對象的狀態(tài)和作用于系統(tǒng)的總和擾動(dòng);NLSEF結(jié)合擾動(dòng)估計(jì)量的補(bǔ)償來生成最終的控制信號。
在對控制器進(jìn)行參數(shù)整定時(shí),可將TD、NLSEF、ESO看作三個(gè)獨(dú)立的部分,分別設(shè)計(jì)完后再組合成完整的自抗擾控制器[10]。
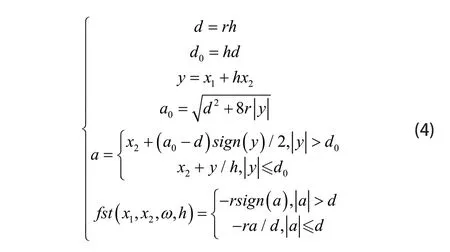
2.1 跟蹤微分器(TD)
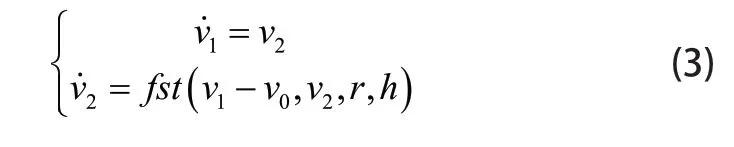
其中r為速度因子,決定著跟蹤的快慢;h為濾波因子,決定著對噪聲的濾波效果;fst函數(shù)為最速控制綜合函數(shù),表達(dá)形式如下:
2.2 擴(kuò)張狀態(tài)觀測器(ESO)
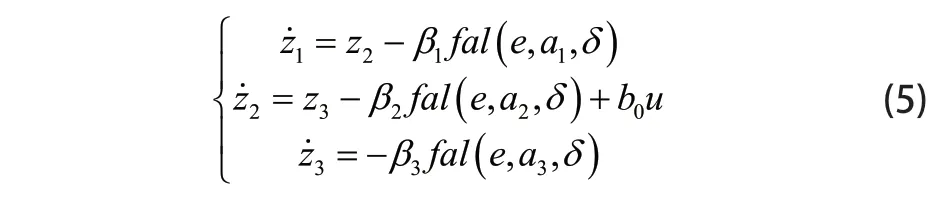
其中b0為補(bǔ)償因子,決定著系統(tǒng)總擾動(dòng)補(bǔ)償量的大小。
2.3 非線性狀態(tài)誤差反饋律(NLSEF)
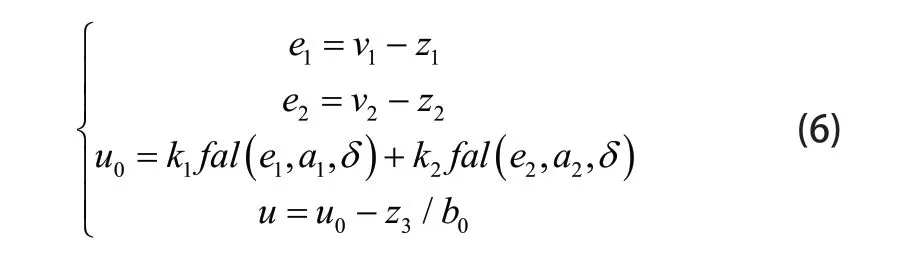
其中k1和k2相當(dāng)于傳統(tǒng)PID控制中的比例增益和微分增益,fal函數(shù)表達(dá)形式如下:

在自抗擾控制器的參數(shù)整定過程中,先整定跟蹤微分器和擴(kuò)張狀態(tài)觀測器的參數(shù)。跟蹤微分器中的參數(shù)r數(shù)值越大,過渡過程越短,h越大,對噪聲濾波效果越好,但二者也不能取的過大,需取值合理才能得到合適的過渡過程與微分信號;擴(kuò)張狀態(tài)觀測器是自抗擾控制器的核心部分,這部分參數(shù)整定的好壞很大程度上決定著控制器的性能,它的跟蹤精度越高,自抗擾控制器的控制性能越好。在取得一定的效果后,再結(jié)合非線性狀態(tài)誤差反饋的性能對自抗擾控制器進(jìn)行整體的參數(shù)整定。經(jīng)過多次的參數(shù)整定,最終確定的參數(shù)取值如表1所示。
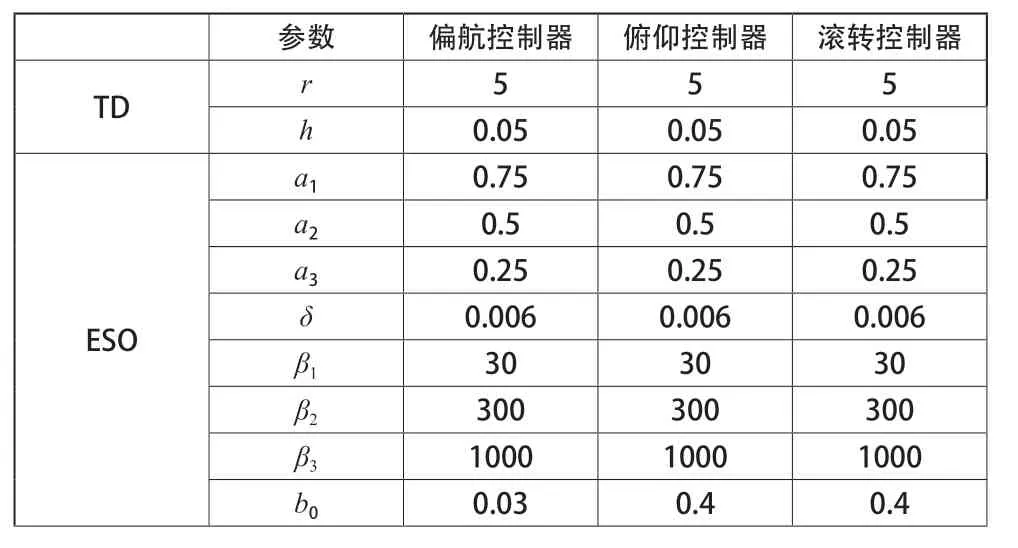
表1 自抗擾控制器仿真參數(shù)取值表

NLSEF a1 0.5 0.5 0.5 a2 0.05 0.05 0.05 k1 25 20 20 k2 240 200 200 δ 1 3 3
3 仿真與驗(yàn)證
設(shè)置四旋翼飛行器系統(tǒng)的仿真參數(shù)為:m=0.85kg, Ix=0.055kg·m2, Iy=0.055kg·m2, Iz=0.11kg·m2, L=0.21m。根據(jù)已經(jīng)建立的四旋翼飛行器動(dòng)力學(xué)模型和設(shè)計(jì)好的自抗擾控制器,在MATLAB軟件中進(jìn)行四旋翼飛行器飛行姿態(tài)控制的仿真實(shí)驗(yàn),測試控制器的性能。將四旋翼飛行器系統(tǒng)分為偏航、俯仰、滾轉(zhuǎn)3個(gè)通道,從而分別進(jìn)行調(diào)節(jié)各個(gè)螺旋槳電機(jī)的轉(zhuǎn)速達(dá)到控制四旋翼飛行器系統(tǒng)的目的,整個(gè)模型的結(jié)構(gòu)如圖3所示。
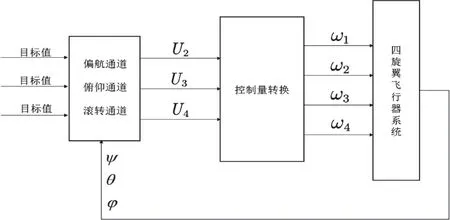
圖3 四旋翼飛行姿態(tài)控制整體框圖
在Simulink中進(jìn)行仿真得到姿態(tài)控制效果,其中偏航角、俯仰角、滾轉(zhuǎn)角的變化分別如圖4所示。

圖4 四旋翼飛行姿態(tài)角控制響應(yīng)曲線
4 結(jié)束語
本文以四旋翼飛行器作為研究對象,對其在數(shù)學(xué)上建立了動(dòng)力學(xué)模型,設(shè)計(jì)了一種基于自抗擾控制研究的控制器,從仿真結(jié)果上看,飛行器的偏航角、俯仰角、滾轉(zhuǎn)角均能較快地對目標(biāo)姿態(tài)位置產(chǎn)生跟蹤響應(yīng),穩(wěn)態(tài)誤差幾乎為零,驗(yàn)證了控制器具有良好的魯棒性和穩(wěn)定性。自抗擾控制器的設(shè)計(jì)克服了實(shí)際中難以建立精確被控模型的困難,無需得到精確的四旋翼飛行器被控模型就能夠達(dá)到控制目的,并且實(shí)時(shí)補(bǔ)償系統(tǒng)擾動(dòng),有效提高了飛行器的響應(yīng)速度及目標(biāo)姿態(tài)角的跟蹤精度,工程應(yīng)用價(jià)值較大。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19