淺談激光三角測距技術
2022-09-23 02:08:52賈治國
科技創新導報 2022年13期
關鍵詞:測量
賈治國
(中國電子科技集團第27研究所 河南鄭州 450047)
激光測距傳感器種類繁多,大體工作原理一致,但是由于應用場景不同,其設計條件也不一樣。以激光三角測距來講,在激光三角測距儀設計過程中,經常要考慮測距范圍和測距精度的取舍問題。為了加深研究和方便用戶選型,本文通用激光測距的原理和特點進行了詳盡分類對比說明,并且針對激光三角測距技術物面上位移量與像面上的位移量的非線性關聯關系進行推論驗證,以促進激光三角測量技術的進步。
1 激光測距技術原理分類
激光測距[1]技術按照工作原理劃分為兩種,分別是光程測距法和激光三角測距法。
1.1 光程測距法
光程測距法是利用光速和往返時間的乘積的一半來描述,一般用于遠距離測量。如果激光[2]以速度C在空氣中傳播,在A、B 兩點間往返一次所需時間為t,則A、B兩點間距離D可用下列表示:

1.2 三角激光測距法
三角激光測距法是利用激光的高方向性、高單色性和高亮度等特點可實現無接觸遠距離測量,一般適用于高精度、短距離的測量。為了保證測量精度,激光光束質量要求能量分布呈高斯分布,原則上一般包含激光發射裝置、目標物、光電接收裝置3 個部分,空間布局呈“三角形”,一般也稱為激光三角測量法。如圖1所示,激光發射器的發射固定波長激光束,垂直照射到非鏡面目標物相對O點高度點A,形成測量光斑,經過目標物漫反射的能量,經接收光學[3]鏡頭T 成像在光電探測器CCD[4](CMOS)器件上,光學鏡頭前置帶通濾光片濾除環境光影響。當被測物體沿激光方向發生移動時,光電探測器上的光斑將產生移動,其位移大小對應被測物體的移動距離,CCD 器件上的像點位置與激光光斑空間位置進行函數關聯,通過幾何換算,可根據像點的相對CCD起點位移量X,求出A物點與相對O點的位移H。
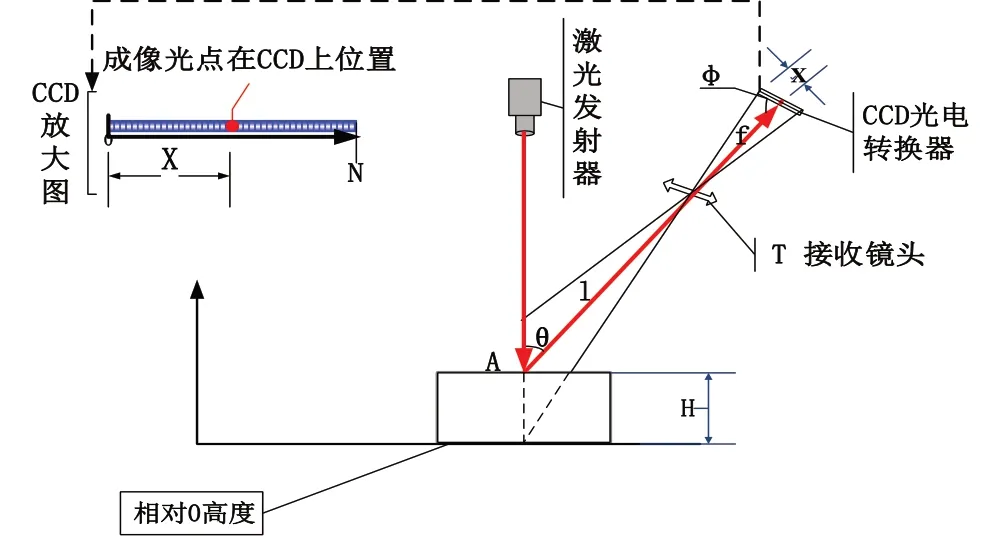
圖1 激光三角測量原理圖
2 激光測距技術方法分類
激光測距儀按照技術實現方法分為3 種,分別是脈沖[5]式(回波法)激光測距法、相位式激光測距法和三角激光測距法。
2.1 激光測距技術方法分類性能指標對比列表
激光測距技術方法分類性能指標對比如表1所示。
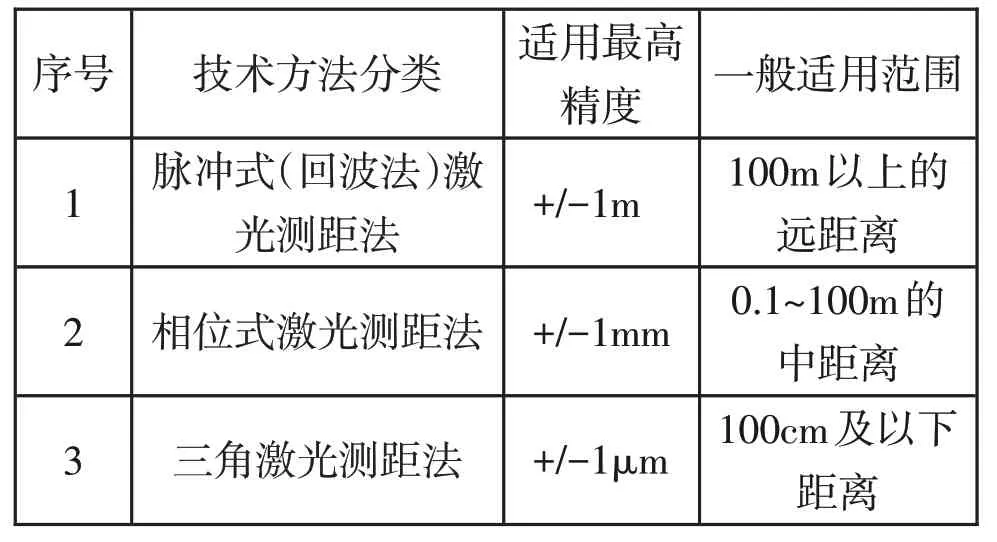
表1 激光測距技術方法分類性能指標對比
2.2 激光測距的技術方法描述
脈沖激光測距簡單來說就是針對激光的飛行時間差進行測距,因為空氣中激光傳播速度很高,注定一般測量距離激光傳播時間很短。為達到高速精確測量,這就要求激光脈沖寬度很窄,能量在時間上相對集中,功率密度很大,計數電路的填充頻率經常要求達到皮秒級別。
脈沖式激光測距法原理如圖2所示。通常設定光速恒定C,由激光發射裝置發出一個(或多個)持續時間極短的脈沖激光,設置高速計數電路,計數填充頻率f,激光發射開啟輸出點時間定義為t0,同時開啟計數電路,經過直線距離S之后,激光在被測目標表面形成散射,散射光的部分能量被預設波段的激光接收系統中的光電探測器接收,高速計數電路準確記錄激光回波信號到達時臨界點定義t1,結束計數,計數為N,那么計數時間間隔(t1-t0)=N/f,因為激光飛行距離即為2 倍待測距離S,飛行時間為N/f,就可以通過速度C 與時間N/f的一半計算出目標物體與發射出的距離S,為了該距離更加精確,也可以通過(脈沖串)多次的測量結果進行累計平均輸出。
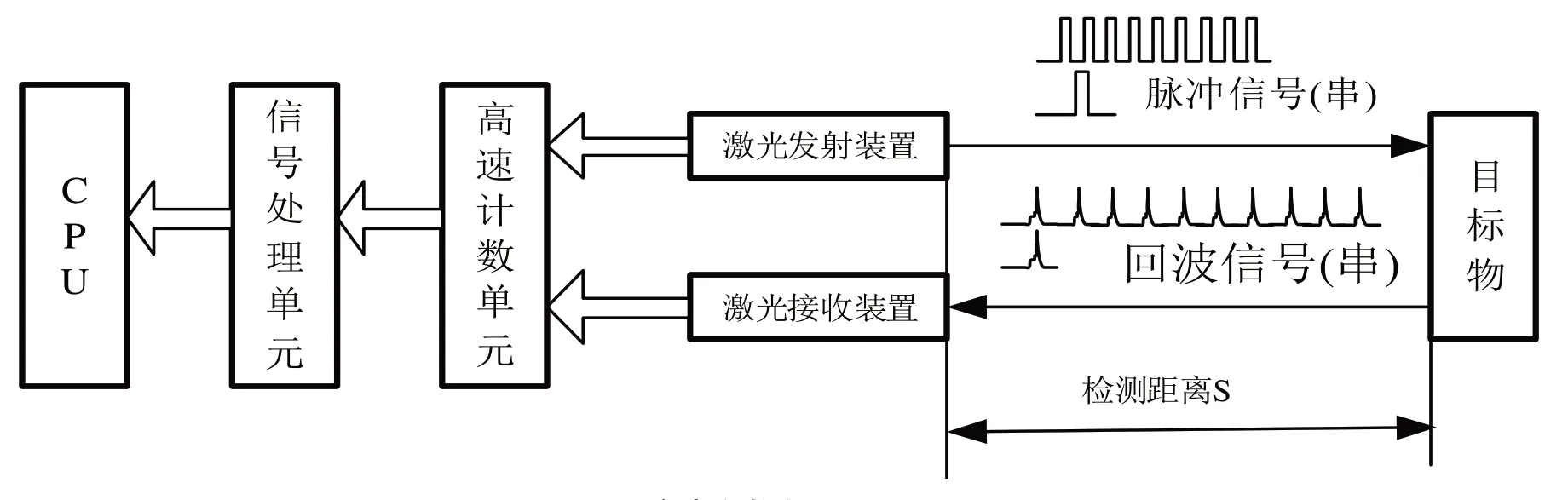
圖2 脈沖式激光測距原理圖
2.2.2 相位式激光測距法
相位式激光測距儀是將一調制信號對激光發射光波的光強進行調制,通過測量測定調制光往返測線一次所產生相位延遲來間接測量時間,再根據調制光的波長,換算此時相位延遲所代表的距離S。
根據測量原理,同時忽略激光在目標物微小反射角影響,存在公式:

式中,C 為激光傳播速度;f 為振動頻率;N 為測線所包含調制半波長整數個數;Δφ為信號往返測線一次產生相位延遲不足半波長部分。
在給定調制和標準大氣條件下,頻率C/(4πf)是一個常數,此時,距離的測量變成了所包含半波長個數的測量和不足半波長的小數部分的測量,即測N 或φ。可以看出,如果采用一個測尺頻率f 時,測距結果只能顯示不足一周的相位差所相應的測距尾數,超過一周的整周數所相應的測距整尺數就無法呈現,因此,相位式測距儀實際電路處理中還包含一組粗測尺的振蕩頻率。把精測尺與粗測尺的結果組合起來,就能得到整個待測距離的數值了,類似于游標卡尺主持刻度加細分游標刻度合計計算。
一般國土資源所檔案管理員都是兼職的,沒有經過系統、專業的檔案管理培訓,缺少檔案管理的專業知識,對土地業務檔案缺少深入細致的分析,從而影響了國土資源所檔案資料的收集、整理和利用。存在想存則存、不存也無所謂的情況。同時,大部分基層所檔案工作還處于“重藏輕用”的被動,單一封閉式狀態,對外服務作用發揮不大。坐等利用者上門,僅限于原始資料的查詢,主動介入服務當地經濟發展和民生的意識較差,由于檔案臺帳不健全,借閱制度未建立,只存不用,檔案的利用程度低,難以體現和發揮國土資源檔案在新農村建設中的作用。
2.2.3 三角激光測距法
三角激光測距法原理如前介紹,即激光光源、被測物面、光接收系統3 點共同構成一個三角形位移測量方法,鑒于其穩定性好精度高,常用在工業品長、寬、厚尺寸測量、平直度、輪廓等方面。
3 三角激光測距的物象關系推導
三角激光測距為了達到一定的分辨率和足夠的接收信號強度,系統采取了激光發射線與接收鏡頭光軸有一定的角度的接收方式采集成像,此時,就會在像面上引起像面傾斜。三角測距物象關系原理圖如圖3所示。
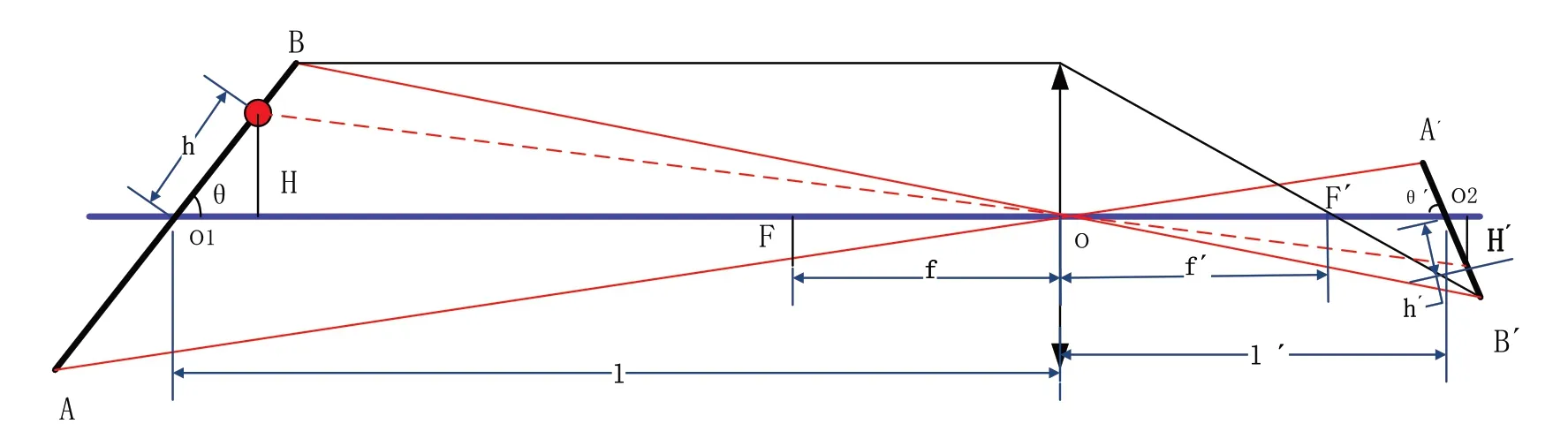
圖3 三角測距物象關系原理圖
在理想光學系統中,表征物象關系[6]的重要參數的垂軸放大率β與軸向放大率α之間滿足如下關系式:

假定H是物面上的一點,Hˊ是像面上的點,二者是一對共軛點。它們的坐標為H(l-h·cosθ,h·sinθ),Hˊ(lˊ+h·cosθ,h·sinθ),對于理想光學系統來講,有如下二式成立(不考慮符號和像的倒正)。
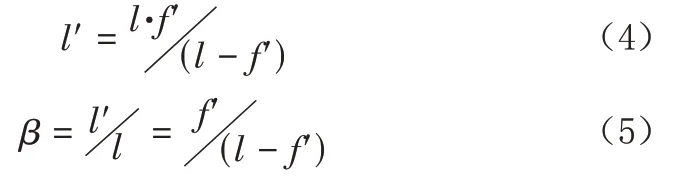
由H和Hˊ二點的坐標可知,有如下關系:
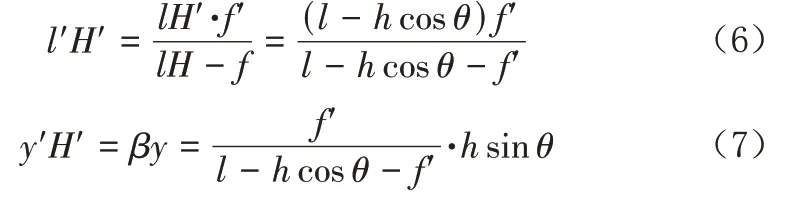
由式(6)化簡(省略l'H'的下標即表示為l'),求得到式(8):

將式(8)代入式(7)化簡,求得到式(9):

針對式(9)數學[7]求導數運算,得到式(10):

式(9)、式(10)表明物平面傾斜后,像平面仍然是一個平面,并且與光軸成一定的夾角,像面的斜率就是式(10),像面與光軸的傾角如式(11)描述:

yˊ的坐標存在如下關系:

整理式(12)得出:

為了簡化設定:a = fˊ·cosθ,b = sinθˊ·cosθ,c =(fˊ- f)·sinθ,且存在θˊ= arc tan(·tan θ),則化簡得到h與hˊ的關系式如下:

因此,式(14)表明,物面上位移量與像面上的位移量之間的函數關系式,當一個光學系統確定之后,即fˊ、l、θ及θˊ等都會確定,那么就可以通過像面上的位移量hˊ計算[7]出物面上位移量h。當然,實際使用三角激光測距儀的時候,還要考慮光斑質量、CCD像素[8]數量尺寸大小、光學相差、電路噪聲等諸多因素,所以,通常對應用于固定場景的三角激光測距儀來說,要進行二次數據標定,以此消除測量系統誤差。
4 結語
通過原理和公式推導,說明三角法測距物面上位移量與像面上的位移量是關聯的,而且是非線性關系,但是存在單調關聯特性。由于設計過程中三角激光測距儀選型光電傳感器的尺寸一般是線性固定的,因此,三角法測距量程越大,精度越低。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00