儲罐壁面爬壁機器人吸附結(jié)構(gòu)設(shè)計與優(yōu)化
2022-09-26 02:37:34王佳烽俞竹青
自動化與儀表 2022年9期
關(guān)鍵詞:結(jié)構(gòu)
王佳烽,俞竹青,呂 雪
(常州大學 機械與軌道交通學院,常州 213164)
石化企業(yè)作為國家的基礎(chǔ)性產(chǎn)業(yè),它為農(nóng)業(yè)、交通、機械、能源等工農(nóng)業(yè)和人民日常生活提供配套服務(wù),在國民經(jīng)濟中發(fā)揮重要作用[1]。 儲罐是石化企業(yè)必備的重要裝備,用于存放氣態(tài)、液態(tài)等化工原料與產(chǎn)品。 儲罐中儲存的介質(zhì)通常具有腐蝕性,為了確保石化設(shè)備的安全運行,必須定期進行噴漆等其他維護工作,通常每6~8年進行一次整體檢修。目前國內(nèi)傳統(tǒng)的儲罐噴涂方法主要通過人工搭建腳手架的方式,首先,在罐壁表面附近設(shè)置腳手架進行噴漆。 腳手架的搭建時間取決于儲罐的大小。搭建腳手架后,作業(yè)人員用噴槍進行噴漆。 在噴涂過程中,每個罐的主體需要噴3~5 次。 噴涂對象包括儲罐主體的內(nèi)外壁面以及所有附加設(shè)備。 這種傳統(tǒng)的人工作業(yè)方式存在以下主要缺點:
(1)作業(yè)周期長,工作效率低。 從腳手架的搭建到噴涂作業(yè)的完成,腳手架的拆卸,工作量大,勞動強度高。 同時,佩戴防墜落裝置會給作業(yè)人員帶來不便,降低工作效率。
(2)損害人體健康,作業(yè)環(huán)境危險。 霧化噴霧會使作業(yè)人員長時間停留在有毒的氣霧空間里,對他們的身體造成巨大損害。 即便使用防護裝置,也很難完全隔絕與涂料接觸[2]。 噴漆作業(yè)和搭建、拆除腳手架均屬于高空危險作業(yè),具有相當危險性。
總之,傳統(tǒng)的高成本低效率、危害人身健康的人工噴漆方式已無法滿足現(xiàn)階段的工藝要求,亟需被自動化程度高的機器人作業(yè)所取代[3-4]。
1 爬壁機器人結(jié)構(gòu)方案設(shè)計
1.1 整體方案布局
本文設(shè)計的爬壁機器人具備3 個基本功能,即吸附、運動和噴漆檢測[5-6]。 如圖1 所示,爬壁機器人采用永磁吸附,履帶式移動,即使運行過程中機器人出現(xiàn)故障或者斷電時也不會發(fā)生脫離罐壁的情況。
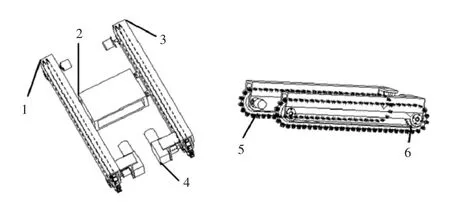
圖1 爬壁機器人結(jié)構(gòu)示意圖Fig.1 Structure diagram of wall-climbing robot
本文設(shè)計的爬壁機器人由爬行驅(qū)動機構(gòu)、永磁吸附機構(gòu)、噴漆檢測機構(gòu)等組成,機構(gòu)組成框圖如圖2 所示。 爬壁機器人通過裝有特制永磁鐵的履帶緊緊吸附在罐壁壁面。 通過蝸輪蝸桿減速電機帶動鏈輪,鏈輪帶動鏈條運轉(zhuǎn),從而使機器人運動,進而驅(qū)動車體向上爬行[7]。
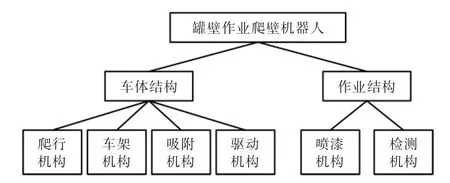
圖2 噴漆爬壁機器人機構(gòu)組成框圖Fig.2 Structure block diagram of painting climbing robot
1.2 自適應(yīng)吸附行走結(jié)構(gòu)模型建立
由于石化儲罐罐壁是一種曲率半徑較大的自由曲面,使爬壁機器人在轉(zhuǎn)彎行走過程中無法實時貼合罐壁保證足夠的吸附力,使爬壁機器人發(fā)生傾覆危險。 根據(jù)上述情況設(shè)計一種自適應(yīng)能力強的吸附行走機構(gòu),該吸附行走機構(gòu)具有兩個方向上的旋轉(zhuǎn)自由度,如圖3 所示,分別為沿X 軸方向如圖3(a)與沿Y 軸方向如圖3(b)所示。
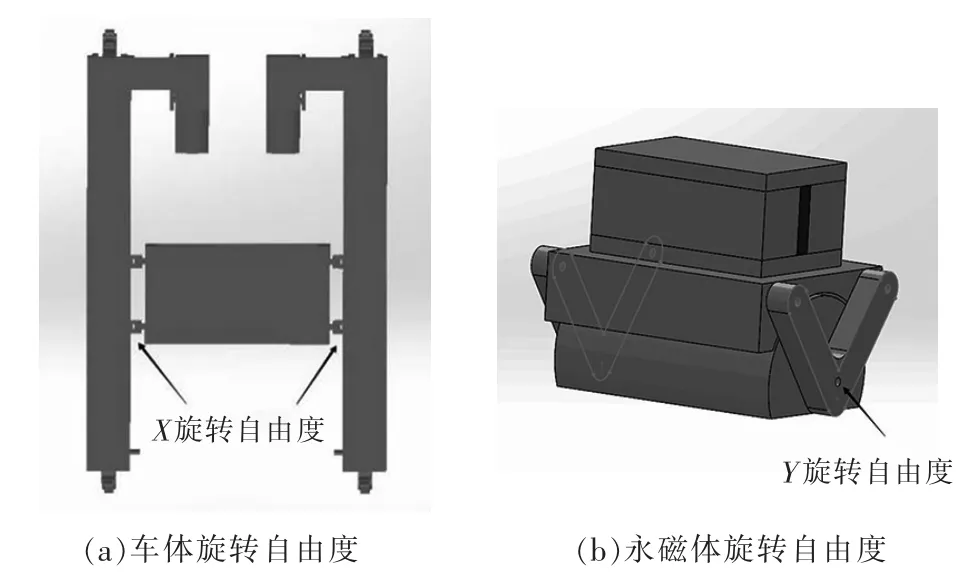
圖3 兩自由度旋轉(zhuǎn)吸附機構(gòu)模型Fig.3 Two degrees of freedom rotating adsorption mechanism model
爬壁機器人通過旋轉(zhuǎn)左右車體與中間平臺的鉸鏈產(chǎn)生沿X 軸方向的旋轉(zhuǎn)如圖4 所示。 當爬壁機器人進行轉(zhuǎn)彎運動時,需要具備在一定范圍內(nèi)實現(xiàn)吸附半徑變化的能力,考慮到機器人轉(zhuǎn)彎時,存在前端吸附結(jié)構(gòu)翹起的情況[8],因此設(shè)計了特殊的吸附結(jié)構(gòu), 使鏈節(jié)與永磁體之間具有旋轉(zhuǎn)自由度,當爬壁機器人轉(zhuǎn)彎運動時,可以通過永磁體旋轉(zhuǎn)自由度,減小吸附結(jié)構(gòu)與罐壁的距離,確保爬壁機器人與罐壁之間具有足夠的吸附力。
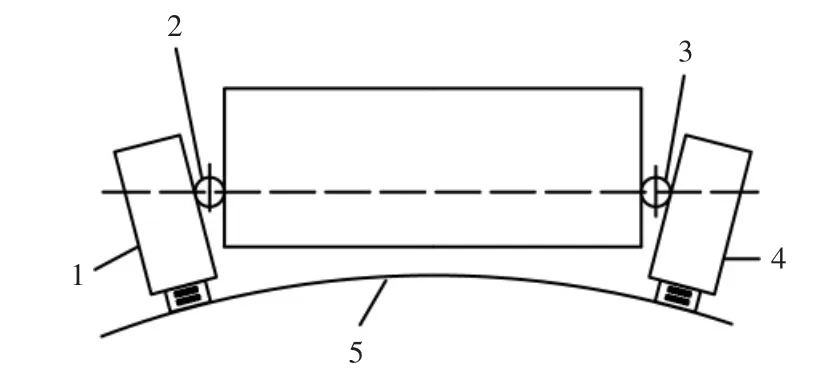
圖4 爬壁機器人曲面適應(yīng)模型Fig.4 Surface adaptation model of wall-climbing robot
2 爬壁機器人靜態(tài)受力分析
本文設(shè)計的爬壁機器人具有結(jié)構(gòu)對稱性,故本節(jié)進行受力分析時只對一半車體進行分析。 爬壁機器人在壁面上處于靜止狀態(tài)時,受重力G,永磁吸附裝置與壁面間的磁吸附力Fi, 壁面對爬壁機器人的支持力Ni以及爬壁機器人和壁面間的摩擦力Ff,爬壁機器人縱向翻轉(zhuǎn)極限點A,爬壁機器人重力偏移軸線距離H,機器人質(zhì)心C。 如圖5 所示,存在4 種失效方式:沿壁面滑動、沿壁面滾動、縱向傾覆和橫向傾覆。
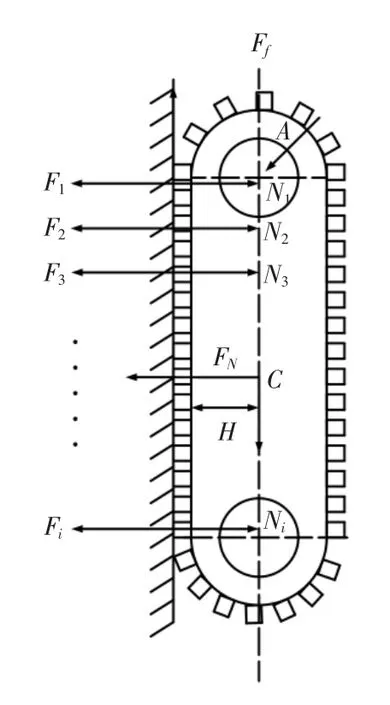
圖5 爬壁機器人縱向受力分析圖Fig.5 Longitudinal force analysis chart of wall climbing robot
2.1 沿壁面滑動時的受力分析
爬壁機器人有沿著壁面下滑的傾向。 為了使機器人靜止在壁面上,機器人與壁面間的摩擦應(yīng)該大于沿壁面外力之和,滿足以下條件:
式中:n 為履帶與壁面同時吸附的永磁體數(shù)目;μ 為靜摩擦系數(shù)。 假設(shè)各永磁體吸附力均相同,則可令:

由公式(4)可以得出:

得到結(jié)果:

式中:N1為沿壁面下滑狀態(tài)下單個永磁體吸附力。
2.2 沿壁面滾動時的受力分析
機器人的向下滾動傾向是由機器人主體上的重力產(chǎn)生的下滾扭矩引起的,是機體內(nèi)部相對作用的結(jié)果。 鏈條上的永磁吸附單元與壁面接觸的總面積不變,機器人在重力力矩的作用下發(fā)生向下滾動。將沿著壁面向下滾動,履帶上端與壁面接觸的第1塊永磁體產(chǎn)生的力矩克服重力矩GH 的作用, 同時電機和減速器提供制動力矩M1和阻力矩M2, 阻止爬壁機器人沿壁面下滾。
式中:L 為最上端與壁面接觸的單個永磁吸附單元的長度。 本文設(shè)計的爬壁機器人采用的是蝸輪蝸桿減速電機,該電機具有自鎖性,可實現(xiàn)反向自鎖,提供足夠大的阻力矩,防止爬壁機器人產(chǎn)生相對下滾。
2.3 縱向傾覆時的受力分析
爬壁機器人不發(fā)生縱向傾覆的條件為:∑MA≥0,通過計算可得:

式中:N2為縱向傾覆狀態(tài)下單個永磁體吸附力。
2.4 橫向傾覆時的受力分析
爬壁機器人本體不發(fā)生橫向傾覆的條件為:∑MB≥0。 橫向受力分析如圖6 所示。
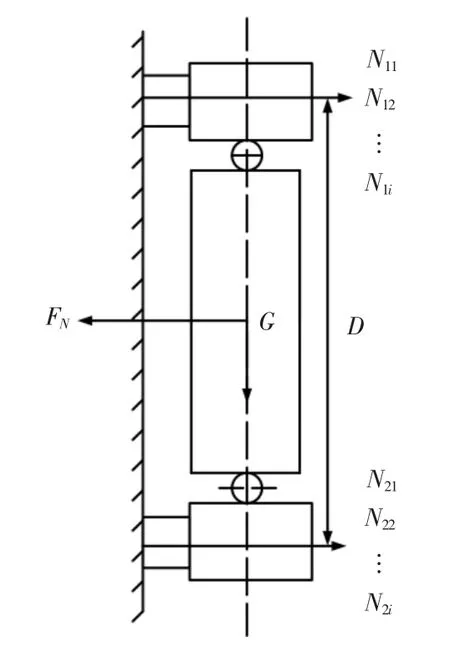
圖6 爬壁機器人橫向受力分析圖Fig.6 Lateral force analysis chart of wall climbing robot
圖中:N1i,N2i為單條履帶永磁體與壁面作用力;D 為爬壁機器人兩履帶吸附中心距離;B 為爬壁機器人橫向翻轉(zhuǎn)極限點。

式中:N3為橫向傾覆狀態(tài)下單個永磁體吸附力。
2.5 靜止吸附狀態(tài)失穩(wěn)極值計算
根據(jù)以上爬壁機器人常見的失穩(wěn)狀態(tài)分析,考慮安全系數(shù),爬壁機器人所需要的最小吸附力為:

式中:K 為安全系數(shù)。
3 永磁吸附結(jié)構(gòu)設(shè)計與仿真分析
3.1 磁吸附力計算
永磁吸附裝置的優(yōu)化,是以永磁輪與壁面間的吸附力為優(yōu)化目標進行設(shè)計計算[9]。由Maxwell 張力法可知,在求解靜態(tài)磁場問題時,需要滿足的條件是磁體為各項同性材料[10],由此作用于磁介質(zhì)上的作用力,等于磁場張量在包圍該磁體的閉合曲面上的曲面積分,可以進行求解計算。

式中:T 為張力張量;s 為永磁體邊界外的代求解閉合面;n 為單位矢量,其方向與積分面積ds 的法線方向一致;B 為通過閉合面s 的磁感應(yīng)強度大小;μ 為空氣相對磁導率。
3.2 永磁體的結(jié)構(gòu)尺寸設(shè)計
初定兩塊永磁體中間的隔磁材料寬度T1=2 mm,軛鐵厚度T2=2 mm,永磁體寬度T3=5 mm 以及氯丁膠厚度T4=1 mm。 爬壁機器人自身重量及負載不超過20 kg。 通過上節(jié)對爬壁機器人的靜態(tài)受力分析可得單個永磁吸附裝置的最小吸附力不得小于15.3 N。 所以對永磁吸附裝置進行3D 建模,運用Ansoft Maxwell 對壁面所受吸附力進行求解,通過改變永磁體高度,確定永磁吸附裝置在滿足最小吸附力的情況時的高度。 仿真分析云圖如圖7 所示。 永磁體高度取5 mm~15 mm,壁面所受吸附力隨永磁體高度變化如圖8 所示。
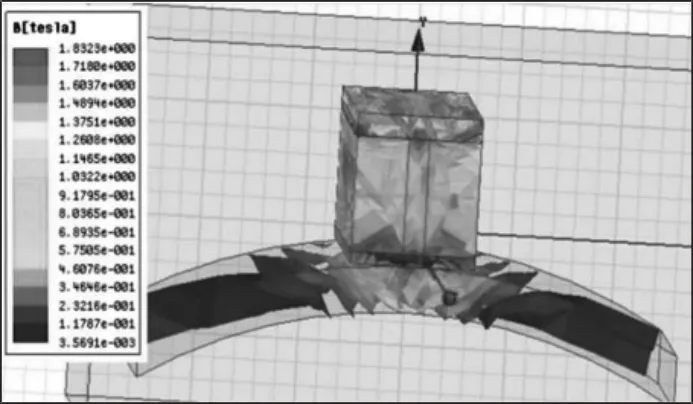
圖7 永磁吸附結(jié)構(gòu)磁感應(yīng)分析云圖Fig.7 Magnetic induction analysis cloud chart of permanent magnet adsorption structure
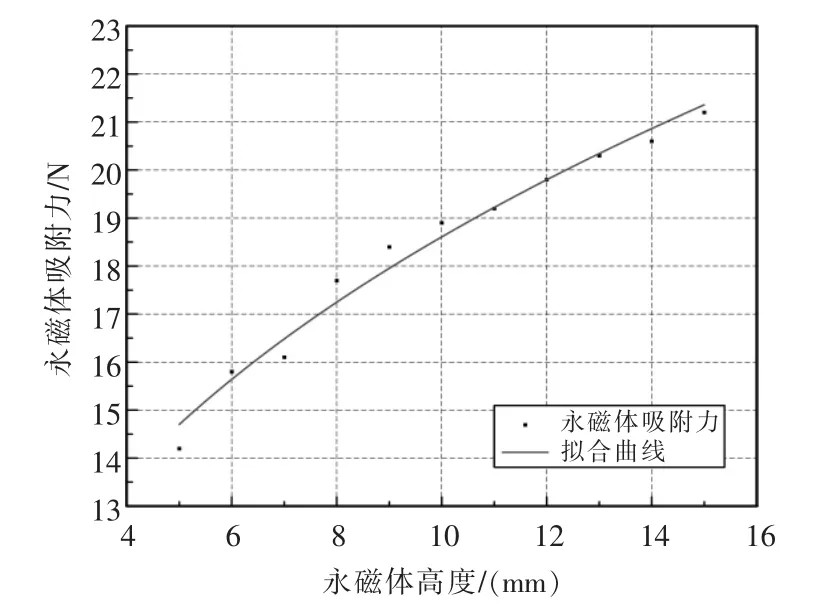
圖8 永磁吸附力隨永磁體高度變化曲線Fig.8 Curve of permanent magnet adsorption force versus permanent magnet height
永磁體的吸附力隨著其高度的增加而增加,當永磁體高度小于8 mm 時,壁面所受吸附力增長較快,當永磁體高度大于8 mm 時,壁面所受吸附力增速減緩,這是因為工作間隙內(nèi)的磁通量有逐漸飽和的傾向。根據(jù)爬壁機器人的靜力學分析,單個永磁體吸附裝置的最小吸附力不小于15.3 N,安全系數(shù)取20%,所以單塊永磁吸附裝置的吸附力應(yīng)為15.3×120%=18.36 N,所以從圖中可以看出永磁體的最小高度應(yīng)取9 mm。
3.3 永磁吸附裝置的結(jié)構(gòu)尺寸優(yōu)化
根據(jù)爬壁機器人的工況條件對磁吸附單元的結(jié)構(gòu)尺寸預先取值,長L=20 mm,寬D=5 mm,高H=10 mm。 本節(jié)利用控制變量法研究不同結(jié)構(gòu)尺寸對磁吸附單元產(chǎn)生的吸附力的影響,并從中選取合適的尺,獲得最佳磁質(zhì)比的磁吸附單元。
待優(yōu)化的永磁吸附單元結(jié)構(gòu)原理圖如圖9 所示,其中需要優(yōu)化的尺寸有:隔磁元件寬度T1;軛鐵厚度T2;永磁鐵寬度T3;氯丁膠保護層厚度T4。 通過Maxwell 軟件進行永磁吸附裝置仿真。
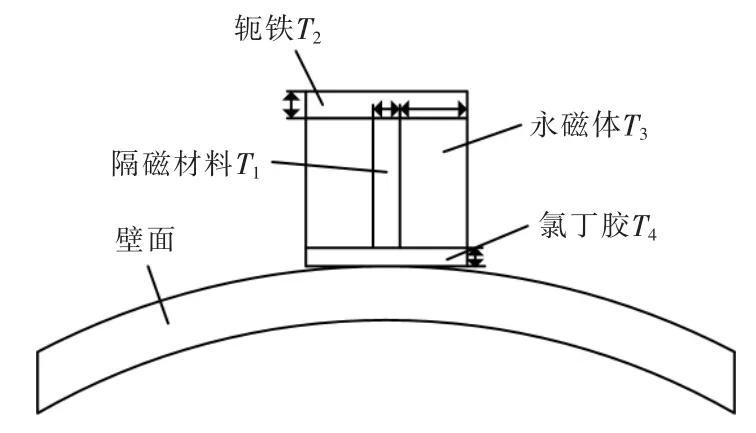
圖9 待優(yōu)化的磁吸附單元結(jié)構(gòu)原理圖Fig.9 Structure schematic diagram of magnetic adsorption unit to be optimized
(1)鋁隔磁元件寬度T1的尺寸優(yōu)化
本節(jié)將以鋁隔磁元件寬度T1為變量,保持其他結(jié)構(gòu)尺寸一定,研究分析其寬度變化對磁吸附力的影響。 選取T1范圍在1 mm~8 mm,并且間隔為1。
通過Maxwell 2D 仿真分析,如圖10 所示,可以看出當T1=1 mm 時產(chǎn)生的最大磁感應(yīng)強度為2.32 T。
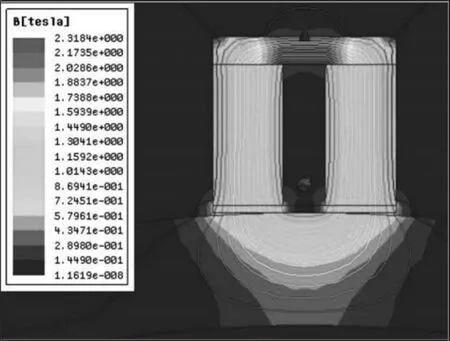
圖10 T1=1 mm 時磁感應(yīng)及磁力線分布圖Fig.10 Distribution of magnetic induction and magnetic line at T1=1 mm
繪圖查看永磁體吸附力隨T1的變化曲線,如圖11 所示。
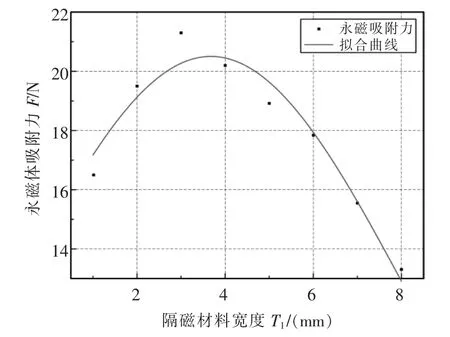
圖11 鋁隔磁元件寬度T1 對磁吸附力的影響Fig.11 Influence of width T1 of aluminum magnetic insulation element on magnetic adsorption force
分析圖11 可知,磁吸附力隨著T1取值的增大呈現(xiàn)先升后降的趨勢,且在T1為3 mm 時達到最大值,其值為21.4 N。 究其原因,不難發(fā)現(xiàn)當鋁隔磁元件寬度不夠大時,永磁體形成的磁力線回路并不都經(jīng)過罐壁內(nèi)部,隨著T1取值的增大,當磁力線回路全都通過罐壁內(nèi)部時,此時產(chǎn)生的磁吸附力為最大值。而當T1繼續(xù)增大,則使磁吸附單元與壁面間的間隙變大,導致磁吸附力下降。 最終選擇鋁隔磁元件寬度T1大小為3 mm,此時能夠產(chǎn)生的吸附力最大。
(2)軛鐵厚度T2的尺寸優(yōu)化
本節(jié)將以軛鐵厚度T2為變量,保持其他結(jié)構(gòu)尺寸一定。選取T2 范圍在1 mm~8 mm,并且間隔為1。
如圖12 所示,可以看出當T2從1 mm~3 mm 時,經(jīng)軛鐵向非工作區(qū)的漏磁減少,同時經(jīng)軛鐵引到工作間隙內(nèi)的磁通量增加。
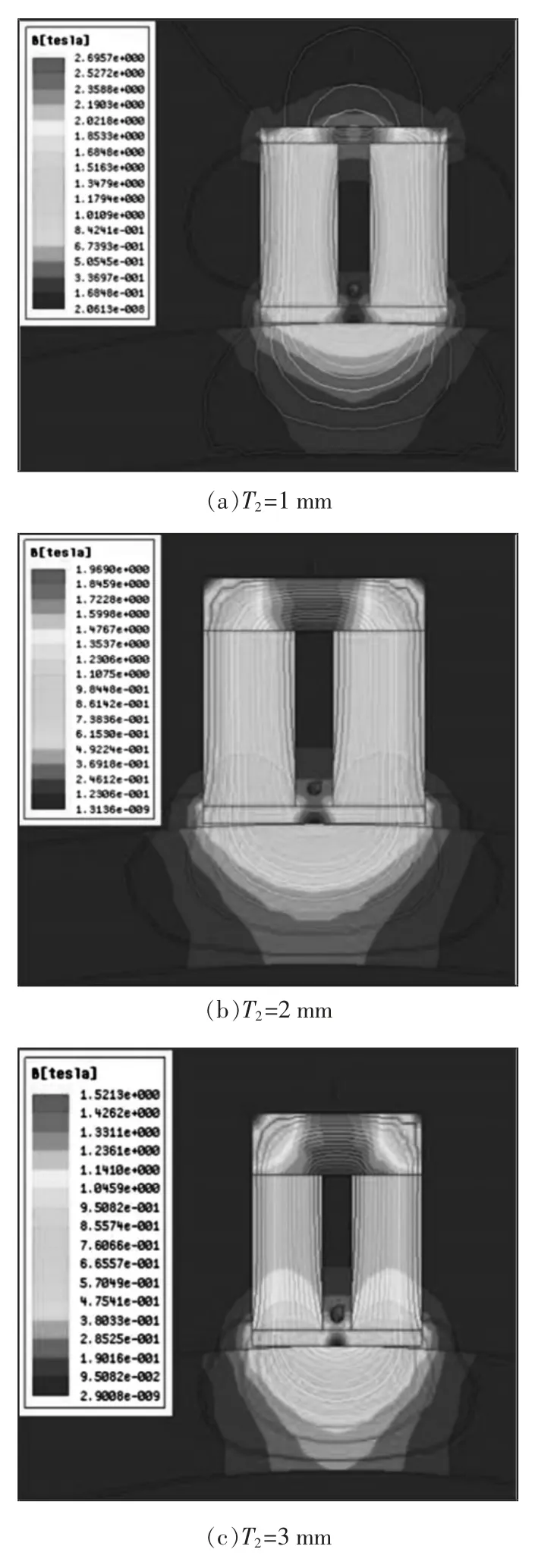
圖12 T2=1,2,3 mm 時磁感應(yīng)及磁力線分布圖Fig.12 Distribution of magnetic induction and magnetic line at T2=1,2,3 mm
繪圖查看永磁體吸附力隨T2的變化曲線,如圖13 所示。
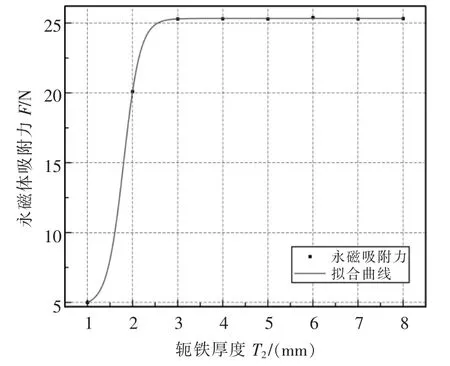
圖13 軛鐵厚度T2 對磁吸附力的影響Fig.13 Effect of yoke thickness T2 on magnetic adsorption
如圖13 所示,當軛鐵厚度T2從1 mm~3 mm 時,壁面所受吸附力陡然增大,壁面所受吸附力在軛鐵厚度3 mm 時達到最大值, 隨后吸附力變化趨于平緩。 產(chǎn)生上述現(xiàn)象的原因是由于當軛鐵厚度不夠大時,磁吸附單元與罐壁間形成的回路不足以容納所有磁力線,導致漏磁現(xiàn)象。 由圖12 可以看出,隨著軛鐵厚度的增加,磁通泄露逐漸減少,工作間隙內(nèi)的磁通量逐漸增加,永磁吸附力增加,隨后磁通量基本不變。 故本文選取軛鐵的厚度T2=3 mm 為宜。
(3)單個永磁體寬度T3的尺寸優(yōu)化
本節(jié)將以永磁鐵寬度T3為變量,保持其他結(jié)構(gòu)尺寸一定,選取T3的范圍在1 mm~8 mm,并且間隔為1。
繪圖查看永磁體吸附力隨T3的變化曲線,如圖14 所示。
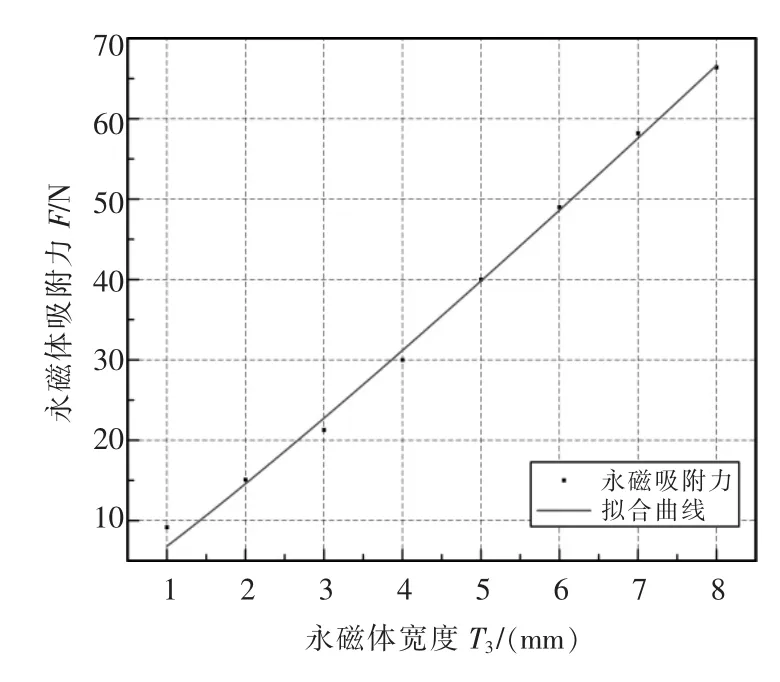
圖14 磁鐵寬度T3 對永磁吸附力的影響Fig.14 Effect of magnet width T3 on permanent magnet adsorption force
根據(jù)圖14 所示,磁吸附力與永磁體寬度T3的變化成正比。 而經(jīng)前文研究可知,爬壁機器人在穩(wěn)定狀態(tài)下的永磁吸附力為47.4 N,而T3=6 mm 時,磁吸附力的取值為48.2 N,符合安全可靠條件,因此本文選擇T3=6 mm。
(4)氯丁膠保護層厚度T4的尺寸優(yōu)化
本節(jié)將以氯丁膠保護層厚度T4為變量,選取T4范圍在1 mm~4 mm,間隔為0.5。
繪圖查看永磁吸附力隨氯丁膠保護層厚度T4的變化曲線,如圖15 所示。
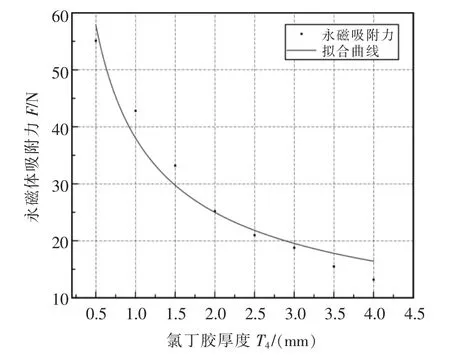
圖15 氯丁膠保護層厚度T4 對永磁吸附力的影響Fig.15 Effect of protective layer thickness T4 of chloroprene on permanent magnetic adsorption
從圖15 可以看出,永磁吸附力隨著T4的增加呈現(xiàn)遞減的趨勢。 為保證永磁吸附力的大小,應(yīng)該選取較薄的氯丁膠保護層,但是太薄的保護層容易受到傷害從而失去保護效果。 綜合考慮分析后,本文選擇T4=1 mm 的氯丁膠保護層為宜。
3.4 永磁吸附裝置的結(jié)構(gòu)尺寸確定
對永磁吸附單元進行磁路研究并設(shè)計出高效的磁路,再以此為基礎(chǔ),采用控制變量法分別對隔磁元件寬度T1,軛鐵厚度T2,永磁鐵寬度T3和氯丁膠厚度T4進行優(yōu)化,得到滿足其穩(wěn)定吸附條件的最優(yōu)參數(shù)。其中T1=3 mm,T2=3 mm,T3=6 mm,T4=1 mm。
4 結(jié)語
針對爬壁機器人在運動過程中因吸附力不足而導致的傾覆問題,通過對爬壁機器人的結(jié)構(gòu)設(shè)計分析,借助Solidworks,Maxwell 等軟件,設(shè)計了一款具有曲面適應(yīng)性的永磁吸附爬壁機器人結(jié)構(gòu):該結(jié)構(gòu)具備兩個方位上的旋轉(zhuǎn)自由度,結(jié)構(gòu)靈活度高,在運行過程中通過旋轉(zhuǎn)自由度使吸附結(jié)構(gòu)自主貼合罐壁壁面,確保爬壁機器人吸附的穩(wěn)定可靠; 對爬壁機器人在靜止狀態(tài)下進行受力分析,考慮不同情況下的失穩(wěn)邊界條件,根據(jù)給定參數(shù)計算得到吸附單元需要提供的有效吸附力,并在確定吸附單元的結(jié)構(gòu)之后,進行磁力仿真和結(jié)構(gòu)優(yōu)化,并獲得了最佳的結(jié)構(gòu)尺寸。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數(shù)理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
