側風環境下高速鐵路接觸網腕臂系統受力特性研究
2022-09-26 05:16:36楊紅梅
電氣技術 2022年9期
關鍵詞:系統
楊紅梅
側風環境下高速鐵路接觸網腕臂系統受力特性研究
楊紅梅
(四川鐵道職業學院,成都 611937)
隨著我國鐵路建設向西南、西北等復雜艱險山區大力推進,強風對接觸網腕臂系統的影響愈發受到關注。本文研究側風環境下腕臂系統的定常氣動特性,采用計算流體動力學方法,建立腕臂空氣動力學模型;采用雷諾時均方法對不同風速下的腕臂氣動特性進行模擬,獲得腕臂氣動力系數值;最后對腕臂系統各構件的應力和位移進行詳細分析,得到不同載荷疊加類型下的系統關鍵受力位置。研究結果可為接觸網腕臂選型和結構參數優化提供參考。
高速鐵路;接觸網;腕臂系統;側風環境;受力特性
0 引言
我國八縱八橫鐵路網已基本形成,電氣化鐵路運營里程突破12萬km,鐵路建設向西南、西北等艱險山區推進,牽引供電系統的安全性更加受到關注。接觸網系統作為牽引供電系統的重要組成部分,是為電力機車提供能量的惟一通道,其動態特性是確保機車穩定受流的關鍵之一。
然而,這些地區氣候環境復雜多變,接觸網系統面臨環境風、地震等外界環境激擾影響[1]。腕臂結構是用于固定承力索和接觸線的裝置,通過設置合理的拉出值,使接觸線在受電弓碳滑板運行軌跡范圍內,并將接觸線的載荷傳給支柱。因此,接觸網腕臂系統不僅持續受線索張力作用,而且同時受環境風等影響,其受力特性更需引起重視。
在接觸網腕臂受力研究中,王玉環利用Midas軟件分析高原鐵路接觸網系統的腕臂結構適應性,并提出優化建議[2]。李少鵬實現了基于有限元法的腕臂靜剛度、靜強度分析,并以此為基礎,研究截面的拓撲優化[3]。羅健等通過傳統腕臂與新型腕臂的動態特性對比,以固有頻率為主要評價依據,分析了新型腕臂的結構性能[4],并在非工作支最大工作載荷條件下,通過Abaqus軟件對幾種不同腕臂結構及其定位裝置應力及撓度進行了校核[5]。鄧洪等從理論分析和仿真計算兩個角度,探討了復合材料腕臂的受力情況,并對其拓撲結構進行優化[6]。張靜等通過模態分析法求得接觸網腕臂的固有頻率,進而基于變形方程獲得腕臂系統載荷的傳遞函數,分析腕臂上載荷的分布規律[7]。在環境風作用方面的研究主要集中于其對弓網系統受流性能的影響。郎天翼等以簡單鏈型懸掛為對象分析龍卷風下的接觸網動力響應[8]。吳凡平等針對山區峽谷地形風場,考慮其時間和空間相關性,研究接觸網的風振特性[9]。
綜上可知,目前針對腕臂力學特性的研究工作主要集中在靜力學分析、動力學分析及疲勞特性分析上,考慮側風作用下的腕臂氣動特性的研究相對較少。在西南、西北等復雜艱險風區[10],強風對腕臂系統及接觸網系統的影響不可忽略。因此,本文系統研究側風環境下腕臂系統的定常氣動特性,分析不同腕臂結構、不同載荷疊加類型下各關鍵構件的最大應力、最大位移和最大變形情況,以期為復雜艱險風區大規模接觸網系統的安全可靠運行提供支撐。
1 側風環境下腕臂氣動特性分析
1.1 腕臂流體力學數學模型
本節重點關注不同風速下的腕臂氣動力系數,通過流體計算軟件Fluent高效求解不同工況下腕臂系統各零部件的升力系數和阻力系數大小,滿足工程技術求解要求。
目前,常用的流體力學數值模擬研究方法有大渦模擬(large eddy simulation, LES)、雷諾平均(Reynolds-average Navier-Stokes, RANS)方法和分離渦模擬(detached-eddy simulation, DES)[11-13]。LES能夠獲得詳細的流場瞬態信息,從而準確捕捉不同大小尺度的渦結構,但對近壁面邊界層網格要求非常精細,導致產生較大的網格數,且要求計算的迭代步數非常大。因此,LES方法對計算機硬件水平要求很高,會消耗較多的計算資源和計算時間。DES則是結合了大渦模擬和雷諾平均湍流模型的優點,被應用于列車周圍瞬態流場的模擬,計算結果與試驗結果基本吻合。
RANS方法求解控制方程時進行了時間平均,這導致RANS方法的求解結果只反映了流場流動的宏觀平均量。同時,RANS方法對網格精度的要求不是很高,計算所需的時間步長也相對更低。對于大尺度脈動不是非常明顯的情況,RANS方法快捷、高效的優點可以很好地滿足工程求解要求,因而被廣泛采用。故本文采用RANS方法對腕臂周圍流場及定常氣動特性進行研究。
1)連續性方程

2)動量守恒方程



3)湍動能方程

4)湍動能耗散率方程

1.2 腕臂計算模型及流場區域

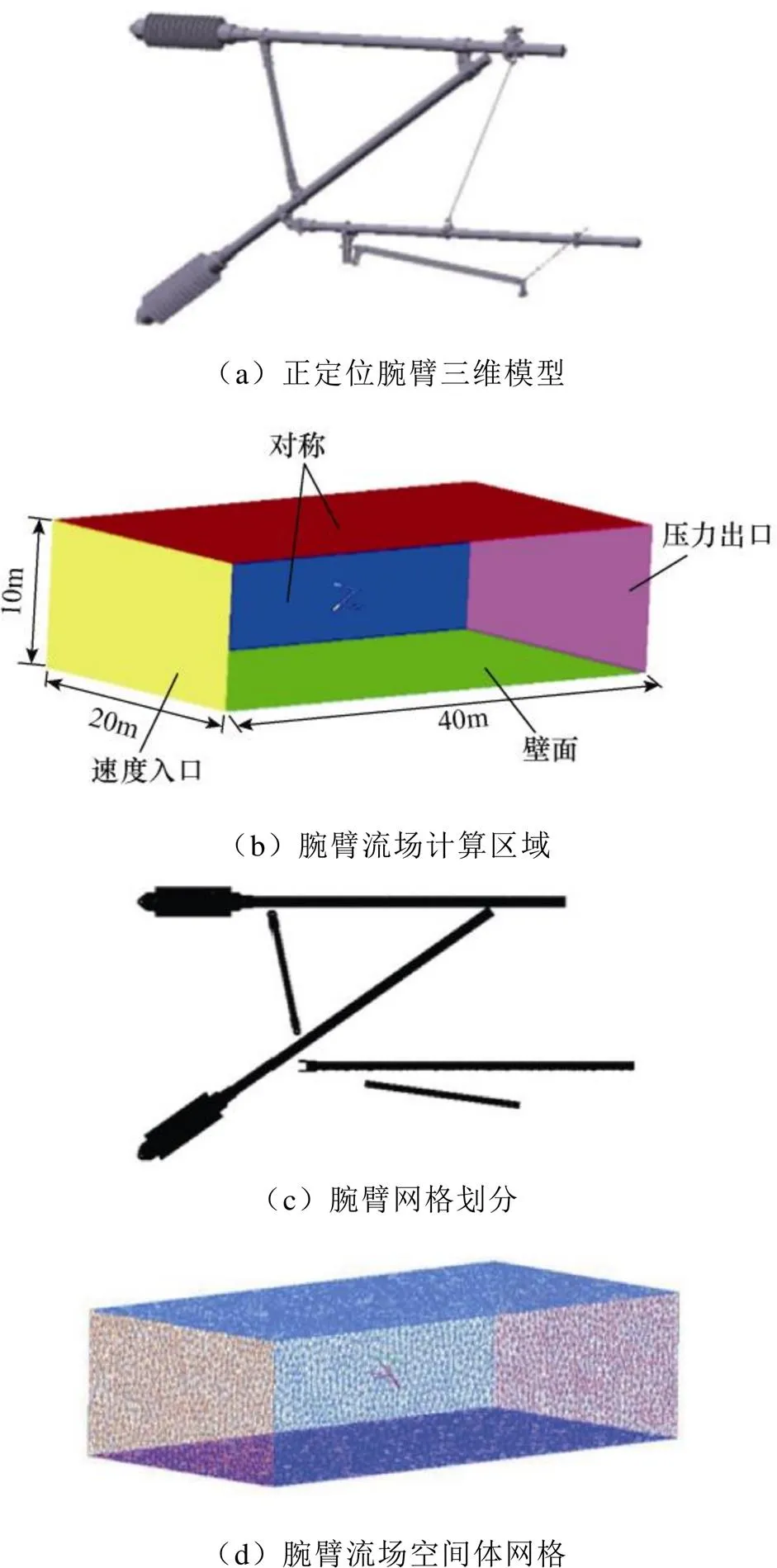
圖1 腕臂流體計算基本模型及網格劃分
速度方向長度取40m,垂直速度方向為20m× 10m的矩形面。腕臂流場計算區域如圖1(b)所示。腕臂表面采用無滑移的壁面邊界條件。根據現場調研情況,并結合TB 10009—2016《鐵路電力牽引供電設計規范》和TB 10621—2014《高速鐵路設計規范》給定的載荷系數,本文確定討論35m/s和46.1m/s兩種風速情況。速度入口面設置為速度入口邊界,入口速度分別為35m/s、46.1m/s,壓力出口面設置為壓力出口邊界,壓力出口的相對壓強設置為0Pa;對稱面即頂面和兩個側面的邊界條件設置為對稱邊界條件。采用非結構四面體網格對流場進行劃分,空間流場最大網格為1m,腕臂表面網格為0.01m。腕臂網格和腕臂流場空間體網格分別如圖1(c)和圖1(d)所示。
1.3 腕臂各部件氣動系數分析
對鋁合金三角正定位腕臂和反定位腕臂進行35m/s、46.1m/s風速下空氣動力學模擬,正反定位腕臂的表面壓力云圖、流場截面速度等值線云圖和流場截面流線云圖如圖2所示,獲得對應風速下的氣動阻力系數和氣動升力系數見表1和表2。由表可知,除定位管外,正定位腕臂大部分部件在不同風速時升力呈相反特性,這是由于氣動系數隨雷諾數變化,使部件在不同風速下呈現出不同值。
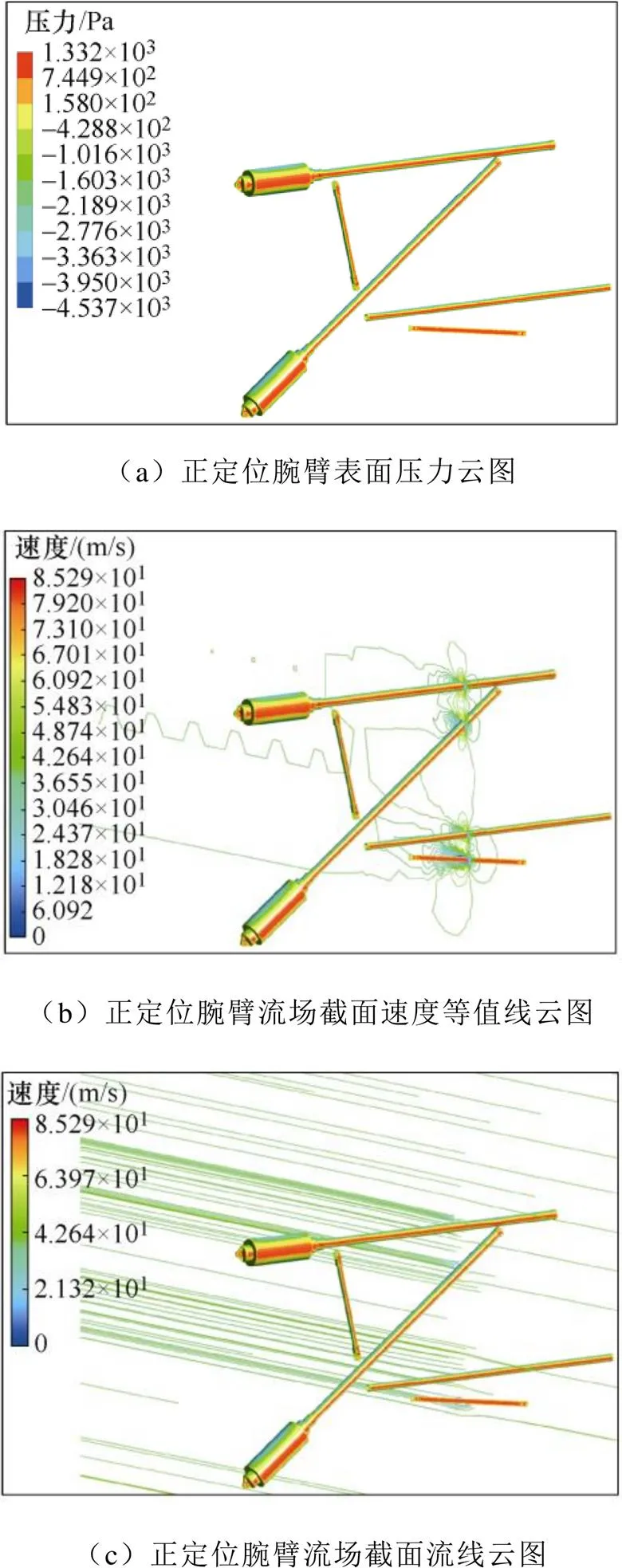

表1 鋁合金三角正定位腕臂氣動力系數
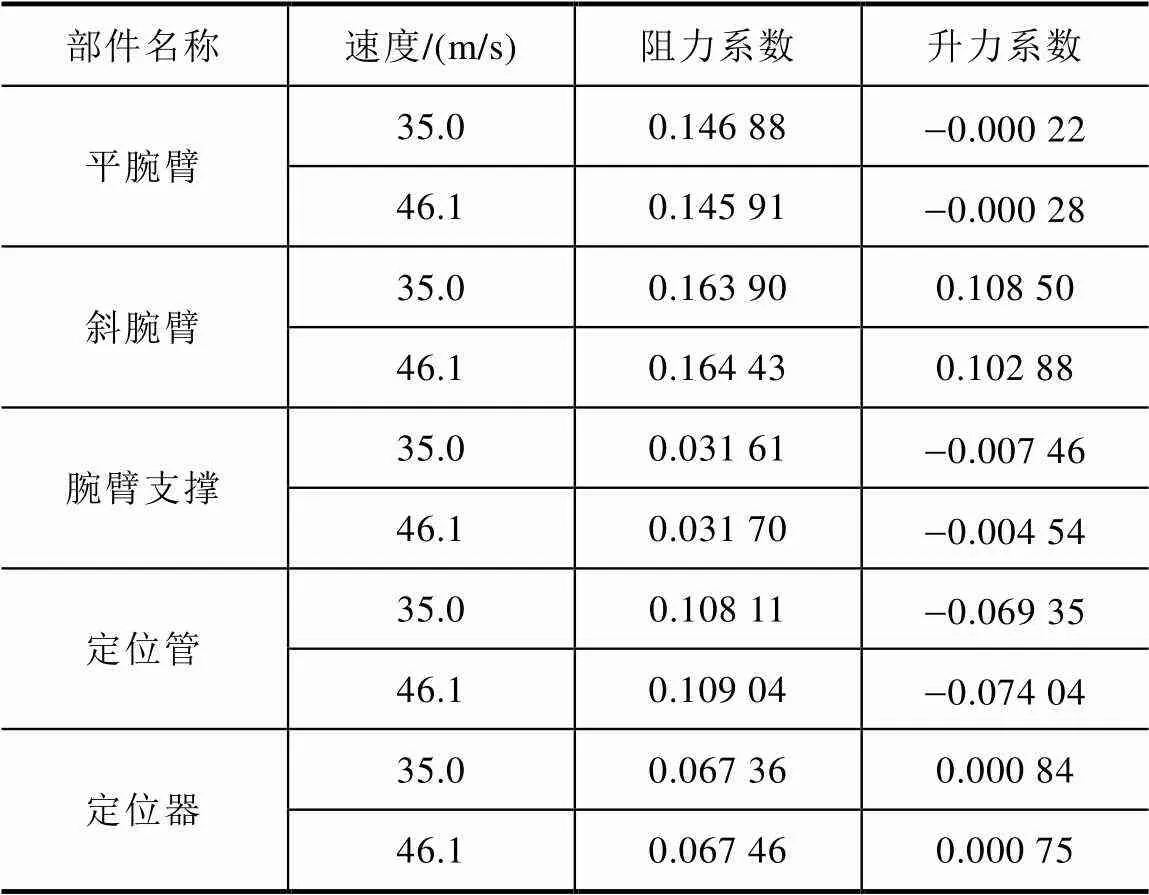
表2 鋁合金三角反定位腕臂氣動力系數
2 接觸網腕臂系統載荷分析
2.1 建模基本設定
為提高仿真效率,對部分零部件做了簡化處理,建立正反定位腕臂裝置有限元模型,分析模型實際受力情況及約束方式,選擇合適的連接方式,加載模型并求解,最終得到關鍵部件應力分布和形變狀態。仿真過程考慮重力作用,同時對關鍵部件和非關鍵部件剛柔體進行區別設置。
1)基本技術條件
依托Ansys Workbench和Fluent仿真平臺,采用的零部件技術條件包括:TB/T 2073—2020《電氣化鐵路接觸網零部件技術條件》、TB/T 2074—2020《電氣化鐵路接觸網零部件試驗方法》、TB/T 2075.1—2020《電氣化鐵路接觸網零部件第1部分:腕臂支撐裝置》和GB/T 6892—2015《一般工業用鋁及鋁合金擠壓型材》。
2)幾何參數
腕臂系統主要幾何參數包括上下腕臂底座距離、絕緣子長度、定位器長度、腕臂管、定位管、絕緣子斷面尺寸等。
3)各構件連接方式
(1)腕臂底座與大地:固定。
(2)各腕臂連接件螺栓連接處:固定。
(3)絕緣子與腕臂底座,定位管與斜腕臂定位環:轉動。
(4)定位器和定位器座連接處:轉動。
4)載荷加載
載荷分為最大工作荷重和破壞荷重;試驗工況分靜態工況和動態工況兩種。本次只針對靜態工況下靜載荷、小風載荷(風速35m/s)+靜載荷、大風載荷(風速46.1m/s)+靜載荷三種工況進行分析。根據TB/T 2074—2020《電氣化鐵路接觸網零部件試驗方法》中整懸掛試驗加力的規定:
(1)接觸線定位處施加水平載荷,大小為定位器的水平工作載荷。
(2)承力索在承力索座處施加水平載荷,大小為承力索座的水平工作荷重,同時施加垂直載荷,大小為承力索座的垂直工作荷重。也可以用一個合力替代水平載荷與垂直載荷,大小及方向由計算確定。
在參考標準的基礎上采用仿真結果的載荷,靜載荷基本力值按標準最大值進行設定,承力索豎直方向4kN、水平方向2.5kN,定位線夾水平方向3kN。通過采用RANS方法測得小風載荷(35m/s)和大風載荷(46.1m/s)時腕臂各部件的阻尼系數。
5)網格劃分
對腕臂各組成部分均賦材料屬性,由于零件種類較多且外形較為復雜,網格劃分方式為Automatic Method,element size為5mm,最終劃分單元數量為1 074 324個。腕臂網格處理和網格劃分示例分別如圖3和圖4所示。
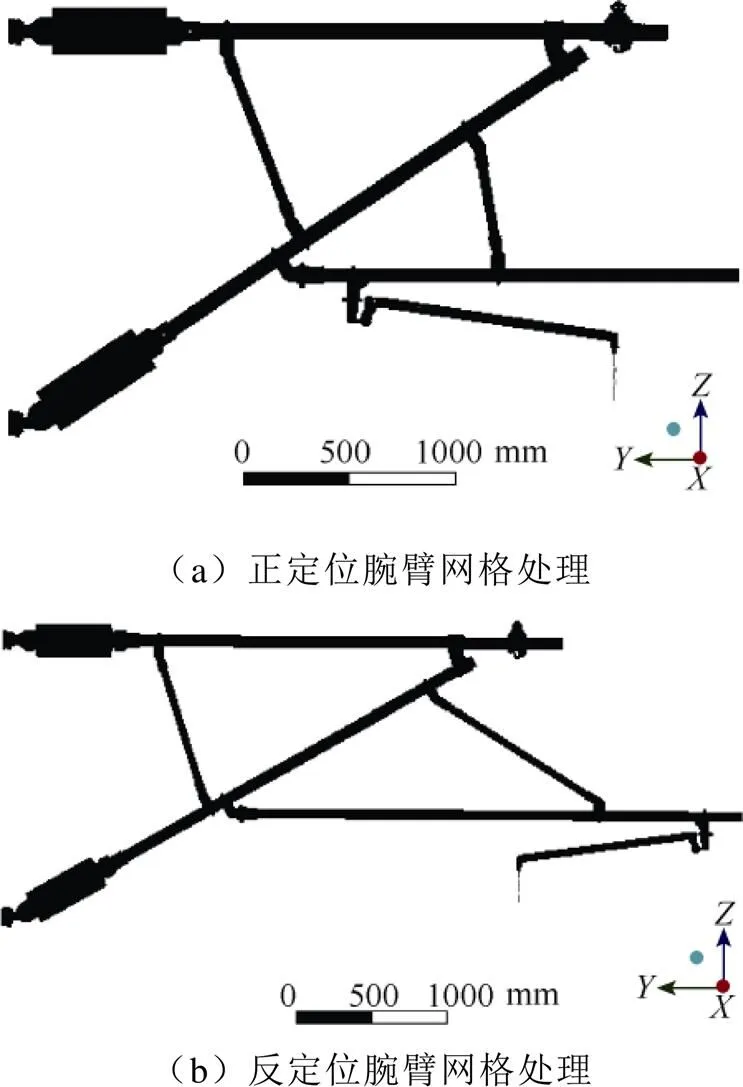
圖3 腕臂網格處理
6)計算結果誤差來源分析
為方便零件受力分析,對部分零件進行簡化處理,網格劃分會丟失部分模型特征,各部件之間的連接方式也未考慮摩擦。綜上,應力和位移計算值可能會稍高于實際值。

圖4 網格劃分示例
2.2 腕臂載荷分析
正定位腕臂裝置各構件應力云圖和位移云圖如圖5所示。

圖5 正定位腕臂裝置靜態求解
正反定位腕臂各構件最大應力見表3,最大位移和最大變形見表4。表3和表4中,A、B和C分別表示靜載荷、靜載荷與小風載荷(風速35m/s)疊加和靜載荷與大風載荷(風速46.1m/s)疊加三種載荷類型;A-sc、B-sc分別表示相應的實測數據,可以看出:
1)無論是正定位腕臂還是反定位腕臂,三種載荷類型下腕臂系統的管件整體應力都較小,最大應力發生在定位器,且位于定位器和定位支座連接處。
2)正定位腕臂在三種載荷類型下的最大位移發生在定位器上,位于定位器和定位線夾連接處,定位器發生最大變形。

表3 不同類型腕臂結構、不同載荷類型下各構件的最大應力 單位:MPa

表4 不同類型腕臂結構、不同載荷類型下各構件的最大位移和最大變形 單位:mm
3)反定位腕臂在三種載荷類型下的最大位移與最大變形大部分發生在定位管上,位于定位管與管帽連接處。
4)根據表3和表4中不同類型腕臂結構、不同載荷類型下各構件最大應力、最大位移實測數據與計算結果的對比可以得出,實測結果與計算結果誤差在10%以內,進一步說明了本文建立的腕臂空氣動力學模型及相應計算方法有效,可以準確反映本文研究對象的動力學特性。
3 結論
腕臂結構的安全可靠是保障接觸網系統穩定運行的必要條件之一,特別在側風等復雜環境下。本文研究了側風環境下腕臂系統的定常氣動特性,采用計算流體動力學方法,建立了腕臂空氣動力學模型;采用雷諾時均方法對不同風速下的腕臂氣動特性進行模擬,獲得了腕臂氣動力系數值;最后對腕臂系統各構件的應力和位移進行了詳細分析,得到了不同載荷疊加類型下的系統關鍵受力位置。
根據仿真數據和實測數據均可以看出,三種載荷下的最大應力均發生在定位器處,正定位腕臂的定位器和反定位腕臂的定位管產生了最大變形。因此,在外界風載荷作用下,腕臂系統的定位結構是薄弱環節,為了提高其可靠性,建議定位器與定位支座連接處采用銷軸形式,可以避免定位器在外界風載影響下,受壓產生不均勻磨損。同時,應適當增加定位管壁厚,提高定位器材質強度,特別是在側風影響較大的地區。研究結果可為復雜艱險山區接觸網腕臂選型與結構優化提供參考。
[1] 孫小軍, 林圣, 張強, 等. 一種牽引供電系統地震災害風險評估方法[J]. 電工技術學報, 2021, 36(23): 4970-4980.
[2] 王玉環. 高原鐵路接觸網腕臂結構適應性研究[J]. 鐵道標準設計, 2022, 66(4): 162-167.
[3] 李少鵬. 基于有限元法的接觸網腕臂截面拓撲優化分析[J]. 電氣化鐵道, 2022, 33(2): 17-20.
[4] 羅健, 張琦. 簡統化接觸網腕臂結構動力學特性分析[J]. 電氣化鐵道, 2021, 32(6): 58-63.
[5] 羅健, 莫繼良, 韓凌青, 等. 新型高速鐵路接觸網腕臂與定位裝置研究[J]. 鐵道學報, 2018, 40(10): 36-42.
[6] 鄧洪. 復合材料接觸網腕臂結構及材料工藝研究[J].鐵道工程學報, 2021, 38(6): 69-74.
[7] 張靜, 劉金增, 劉志剛, 等. 高速鐵路接觸網腕臂系統的力學特性[J]. 西南交通大學學報, 2021, 56(2): 347-353.
[8] 郎天翼, 王浩, 劉震卿, 等. 移動龍卷風作用下高鐵接觸網風振響應分析[J/OL]. 振動工程學報, https://kns.cnki.net/kcms/detail/32.1349.TB.20210727.1351.004.html.
[9] 吳凡平, 徐釗, 劉志剛, 等. 山區峽谷地形風場下柔性接觸網風振特性研究[J]. 鐵道學報, 2021, 43(5): 47-61.
[10] 陳可. 高鐵接觸網彈性吊索配置方案對弓網受流性能的影響[J]. 電氣s技術, 2021, 22(10): 22-27, 33.
[11] 曹鵬程, 廖紹凱, 張研, 等. 基于S-A湍流模型的Runge-Kutta有限元算法[J]. 計算力學學報, 2022, 39(2): 185-191.
[12] 李瀚濤, 舒立春, 胡琴, 等. 考慮覆冰粗糙度影響的風力發電機葉片氣動性能數值仿真[J]. 電工技術學報, 2018, 33(10): 2253-2260.
[13] 張珍, 葉舒然, 岳杰順, 等. 基于組合神經網絡的雷諾平均湍流模型多次修正方法[J]. 力學學報, 2021, 53(6): 1532-1542.
[14] 張玉嬋, 何正浩. 基于Fluent分析交叉跨越輸電線路流場分布[J]. 電氣技術, 2019, 20(5): 5-9.
Stress characteristics of catenary cantilever system of high-speed railway under crosswind environment
YANG Hongmei
(Sichuan Railway College, Chengdu 611937)
With the development of China’s railway construction to the southwest, northwest and other complex mountainous areas, the impact of strong wind on the catenary cantilever system is attracting more attention. In this paper, the steady aerodynamic characteristics of the cantilever system in the crosswind environment are studied. The aerodynamic model of the cantilever is established by using the computational fluid dynamics method. Reynolds time-mean method is used to simulate the aerodynamic characteristics at different wind speeds. The aerodynamic coefficients of the cantilever are obtained. Finally, the stress and displacement of each components of the cantilever are analyzed in detail, and the key stress positions under different load are obtained. The research results may provide a reference for catenary cantilever selection and parameter optimization.
high-speed railway; catenary; cantilever system; crosswind environment; stress characteristics
2022-05-05
2022-05-21
楊紅梅(1987—),女,碩士,講師,主要從事鐵路電氣化研究工作。
國家自然科學基金青年基金項目(52102478)
四川鐵道職業學院重點項目(202111001)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
