針梳機羅拉導柱徑向圓跳動的視覺測量方法
2022-09-30 00:52:58韓京海金守峰沈文軍肖福禮
毛紡科技 2022年9期
關鍵詞:測量
韓京海,金守峰,沈文軍,肖福禮,嚴 楠
(1.南京交通職業技術學院 軌道交通學院,江蘇 南京 211188; 2.西安工程大學 機電工程學院,陜西 西安 710600;3.陜西省計量科學研究院,陜西 西安 710100; 4.寧波職業技術學院 機電工程學院,浙江 寧波 315800)
針梳機廣泛應用于精梳毛紡、化學纖維等前紡工藝過程,通過羅拉牽伸可有效改善纖維的松解平直狀態及毛條結構的均勻程度,適宜精梳長纖維。牽伸羅拉作為紡織機械針梳機的重要零部件,其幾何精度會影響纖維牽伸質量。目前針梳機牽伸羅拉的幾何精度檢測主要以人工接觸式測量為主,測量儀器的測頭與牽伸羅拉導柱表面的直接接觸從而產生接觸摩擦,不僅容易劃傷被測物表面,也影響了測量的精度。
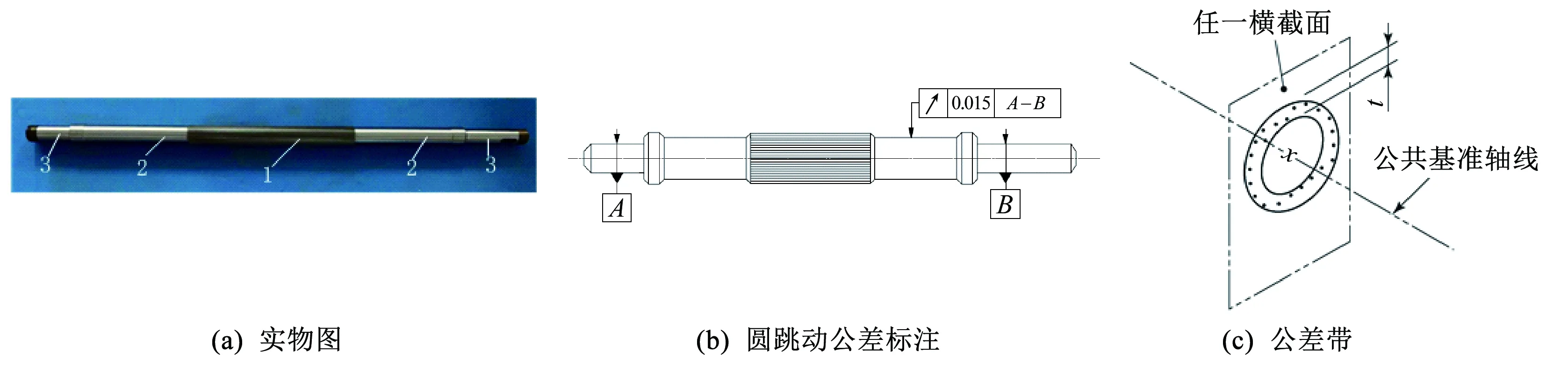
1—羅拉工作面;2—羅拉導柱;3—羅拉頸。圖1 牽伸羅拉及圓跳動公差Fig.1 Draft roller and circular runout tolerance. (a)Physical map; (b)Circular runout tolerance marking; (c)Tolerance zone
隨著機器視覺測量技術的發展,通過視覺測量技術代替人工進行幾何精度的測量在各領域得到了應用。彭凱等[1]提出一種用于適用于低轉速機床主軸徑向跳動誤差的機器視覺測量系統,利用CCD傳感器獲得主軸跳動圖像,測量精度達到了的徑向跳動誤差亞微米級。郭學慶等[2]設計優化算法有效分離主軸回轉誤差,并采用最小二乘法評定了主軸回轉精度。周曉東等[3]提出了一種基于線結構光的圓柱度測量方法,根據軸類零件的特征,建立了結構光測量模型,其測量精度為20 μm,為圓柱度的評價提供可靠數據。胡凌皓等[4]提出了一種基于計算機視覺技術的羅拉倒角非接觸測量方法,通過提取羅拉輪廓影像的根底部倒角特征參數,實現對不同尺寸的回轉類工件的倒角自動檢測。郭天太等[5]提出了二維投影式軸類零件測量方法,實現了對花鍵齒頂圓、長軸等半徑及長度的非接觸式測量,準確率達99.8%。賀秋偉等[6]針對滾珠螺母的形位公差測量要求,提出了基于計算機視覺的檢測方法,通過圖像處理提取螺母的單像素邊緣點,以螺母的圓度、圓柱度及跳動等視覺測量模型實現滾珠螺母幾何公差的測量。張學昌等[7]提出了在圖像域中基于誤差轉換的曲軸圓度及圓柱度誤差評價方法,通過建立圓度、圓柱度評價模型對曲軸軸頸形狀誤差進行測量。劉勇等[8]提出了基于工業CT圖像的管道內表面圓柱度測量方法,以Facet模型提取管道內表面CT圖像的邊緣點信息,建立最小二乘圓柱圓柱度測量模型測量管道內表面的圓柱度。龐云龍等[9]對光纖端面圖像進行預處理,提取邊緣輪廓特征,建立基于最小二乘橢圓擬合的纖芯和包層端面圓度評價模型,通過MatLab軟件實現了光纖端面不圓度的測量。周金波等[10]對沖孔的圓度測量提出一種圖像形態學融合最小二乘法擬圓的邊緣擬合方法,替代圖像拼接方法,實現了對沖孔圓度、半徑及位置的測量。陳厚瑞等[11]利用顯微視覺技術獲取微球圖像,基于微球邊緣輪廓建立基于最小二乘圓擬合算法的微球圓度測量模型,實現對微球圓度有效檢測。楊建西等[12]采用機器視覺方法對機油泵內外轉子結構參數進行非接觸式測量,以改進最小二乘法提取機油泵亞像素邊緣信息,建立機油泵內外轉子結構參數模型,實現中心距、圓度等幾何量的中高精度測量。金守峰等[13]提出了一種基于回轉類零件橫截面輪廓的圓度視覺測量方法,以改進Zernike矩算法提取零件橫截面輪廓的亞像素邊緣信息,通過建立圓度模型測量回轉類零件的直徑與圓度。綜上所述,對于針梳機羅拉導柱徑向圓跳動主要依靠人工檢測。
基于此,本文提出基于機器視覺的牽伸羅拉導柱圓跳動測量方法,通過背光成像獲取旋轉過程中的羅拉導柱軸截面序列圖像,采用三次多項式擬合算法提取羅拉導柱軸截面邊緣亞像素輪廓特征,以最小二乘法擬合基準軸線,構建圖像域下的圓跳動測量模型,實現針梳機牽伸羅拉導柱圓跳動的非接觸式測量。
1 基于機器視覺的牽伸羅拉導柱徑向圓跳動測量系統
1.1 牽伸羅拉
圖1(a)所示為針梳機牽伸羅拉,由羅拉頸、羅拉工作面及羅拉導柱等表面構成,羅拉頸安裝在羅拉座上,工作面加工有溝槽,以對牽伸羅拉的工作面構成鉗口夾持紗條,羅拉導柱是每列羅拉連接的基準,其圓跳動公差影響羅拉轉動及紗條質量。羅拉導柱的圓跳動標注如圖1(b)所示,被測羅拉繞基準軸線(A-B)旋轉1周時,測量儀器的最大變動量為徑向圓跳動[14]。羅拉徑向圓跳動的公差帶如圖1(c)所示,在垂直于基準軸線(A-B)的任一測量截面內,半徑差為公差值t,且圓心在基準軸線上的2個同心圓之間的區域。根據FZ/T 93064—2017《棉粗紗機牽伸下羅拉》規定,羅拉導柱徑向圓跳動公差值t≤0.015 mm。
1.2 基于機器視覺的徑向圓跳動測量系統
由圖1(b)所示的羅拉導柱圓跳動的精度要求,本文構建如圖2所示的基于機器視覺的羅拉導柱圓跳動測量系統,以V型架為基準,牽伸羅拉繞著基準軸線轉動,軸向無位移。由于羅拉的金屬表面會反光干擾成像質量,因此采用背光成像方式,通過LED光源陣列提供均勻的背景光。由大恒水星工業相機在物距為250 mm條件下獲取羅拉導柱圖像,通過USB3.0接口實時傳輸至計算機,計算機顯卡為NVIDIA GeForce GTX 1650,CPU為AMD A8—7680,內存為16 GB,硬盤為1.5 TSSD,在MatLab 2018環境中設計開發圖像處理算法以實現羅拉導柱徑向圓跳動的測量。
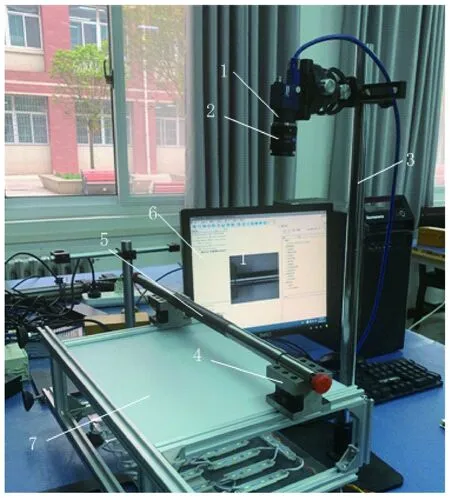
1—工業相機;2—鏡頭;3—相機支架;4—V型架;5—羅拉;6—計算機;7—面光源。圖2 測量系統Fig.2 Measurement system
2 圖像域下的牽伸羅拉導柱徑向圓跳動模型
根據羅拉導柱徑向圓跳動的定義,在圖2的測量系統中,羅拉在V型架上進行等角度間隔旋轉1周,羅拉導柱投影到圖像域的二維軸截面如圖3所示。

圖3 羅拉導柱軸截面圖像Fig.3 Cross section image of roller guide pillar shaft. (a)A frame image. (b)Binary image. (c)Subpixel edge detection
設基準實際軸線的最小二乘軸線為基準公共軸線,其方程見式(1):
y=kx+b
(1)
式中:y為基準公共軸線,x為基準實際軸線點,k為斜率,b為截距。
根據最小二乘原理,基準組成要素的邊緣點pij(xij,yij)到軸線距離平方和最小,計算k、b,確定基準最小二乘軸線,則優化的目標為:
(2)
(3)
在垂直于基準軸線的任一測量截面內,max(rij(k,b))為最大跳動量,min(rij(k,b))為最小跳動量,則二者之差Δrij為:
Δrij=[maxrij(k,b)-minrij(k,b)]
(4)
本文以最小包容區域作為羅拉導柱徑向圓跳動的評定方法,則被測要素的徑向跳動f為:
f=maxΔrij
(5)
3 基于多項式擬合的羅拉導向柱邊緣亞像素輪廓特征提取
羅拉導柱的軸截面圖像如圖3(a)所示,根據羅拉導柱圖像灰度分布特點,采用最大類間方差法對其進行二值化處理,如圖3(b)所示,羅拉導柱邊緣特征明顯,為了提高邊緣檢測精度,采用基于多項式擬合的亞像素檢測方法提取羅拉導柱輪廓特征。
3.1 基于Canny算子的像素級羅拉導柱邊緣檢測
由圖3(b)可知,羅拉導柱的邊緣部分是圖像的前景與背景變化最顯著的位置,為精確得到羅拉導柱的上下邊緣,對羅拉導柱進行Canny算子像素級邊緣檢測。在高斯卷積平滑的基礎上,采用式(6)所示的2×2模板對平滑后的羅拉導柱圖像進行x、y方向的二維一階微分運算。
(6)
式中:Gx為x方向的梯度,Gy為y方向的梯度。
由此得到梯度的幅值M和方向θ為:
θ=arctan[Gy(x,y)/Gx(x,y)]
(7)
3.2 亞像素級檢測
通過Canny算子得到的像素級邊緣如圖3(b)所示,羅拉導柱邊緣特征近似平行線,因此采用基于多項式擬合算法進行羅拉導柱的亞像素級邊緣檢測。利用多項式函數對羅拉導柱像素級邊緣進行最小二乘擬合,根據擬合函數確定羅拉導柱邊緣輪廓。設三次多項式函數的表達式為:
f(x)=ax3+bx2+cx+d
(8)
當y=f(x)時,以測量值與回歸值的偏差平方和S反映全部測量值與回歸值之間的偏離程度[15-16],其表達式為:
(9)
對S進行偏微分計算,取極值條件為:
(10)
由式(10)計算多項式系數a、b、c、d,再根據條件計算羅拉導柱的亞像素邊緣,如圖3(c)所示。
4 實驗分析
4.1 視覺系統標定
視覺系統的標定是決定圖像測量精度的關鍵因素之一,標定主要是確定相機的內、外參數[17]。將光刻工藝加工的1 mm方格標定板固定在工作臺上,保證羅拉導柱表面位于標定面上,標定板與相機位置關系及標定誤差如圖4所示,得到相機的內參數為:
旋轉矩陣為:
平移矩陣為:
T=[-120.805 6,0.184 5,-0.408 8]
得到視覺測量系統的像素當量為0.0 041 mm/像素。
作為城市景觀的焦點和城市公共空間的重要組成部分,小尺度空間水景在城市微觀環境的整治中發揮著積極作用,是城市面貌的櫥窗,也是評價人居環境的重要標準[12].小尺度空間水景的營建具有美學和生態學等多種意義,日益成為住宅小區景觀設計的一大新亮點.東西方均對水景的運用進行了大量研究和應用實踐,也涌現出了一批典型性的佳作,但單獨針對小尺度空間研究水景應用的系統理論和代表性方案并不多.
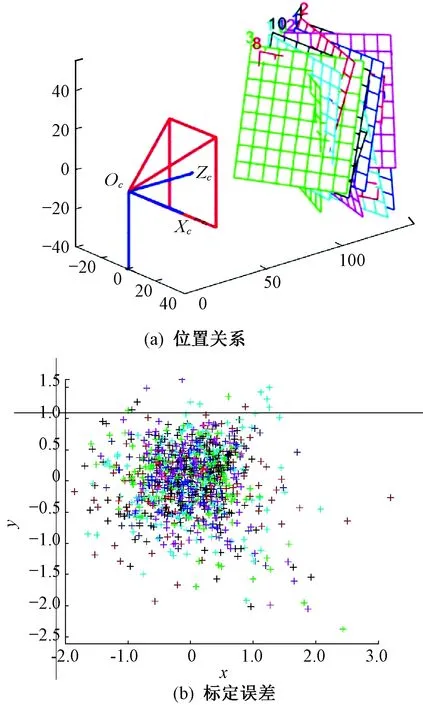
圖4 視覺標定Fig.4 Visual calibration. (a)Positional relationship; (b) Calibration error
4.2 羅拉導柱徑向圓跳動的測量數據分析
4.2.1 測量數據分析
在計算羅拉導柱徑向圓跳動時需對基準軸線進行擬合,在MatLab 2018優化工具箱中,對式(1)(2)采用最小二乘函數 lsqnonlin進行優化計算得到最小二乘基準軸線為y=-0.004 8x+1 181.2,如圖5所示。
由圖2所示的測量系統,以30°為間隔角將羅拉旋轉1周,得到12幀羅拉導柱的軸截面圖像,通過本文亞像素邊緣檢測方法得到如圖5所示的羅拉導柱的上下邊緣的亞像素邊緣點數據,這些數據分布在基準軸線的兩側,通過局部放大可知,羅拉導柱邊緣點數據不完全相同,在直徑方向存在跳動,即徑向跳動。
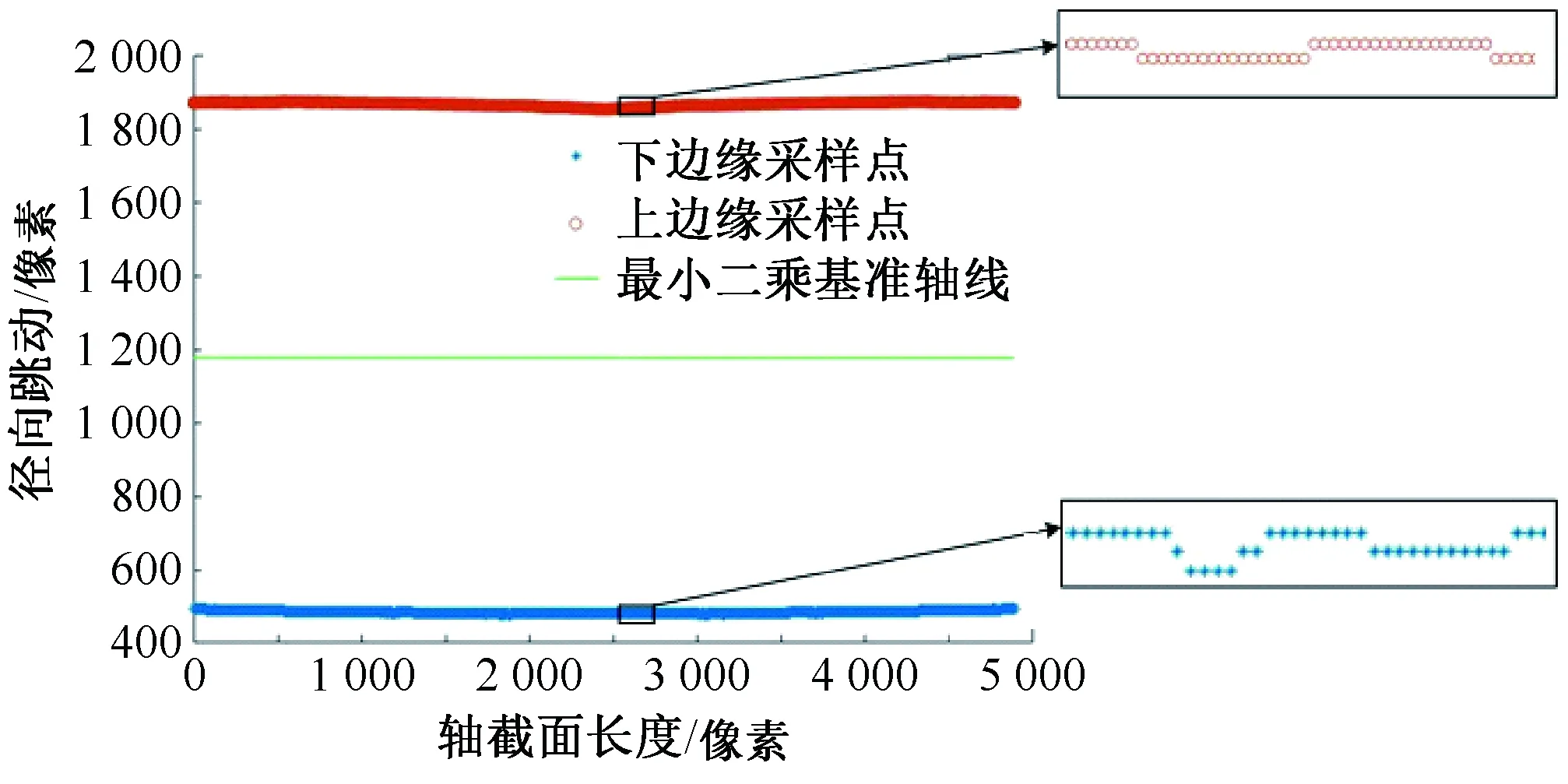
圖5 邊緣點數據分布Fig.5 Edge point data distribution
根據式(3)(4)得到如圖6所示的某一幀羅拉導柱軸截面的最大跳動量與最小跳動量的差值變化曲線,得到測量導柱軸截面長度上任意一個測量截面的差值。根據式(5)計算得該幀軸截面的徑向圓跳動為0.006 8 mm,小于設計的徑向圓跳動公差0.015 0 mm,在公差范圍內。
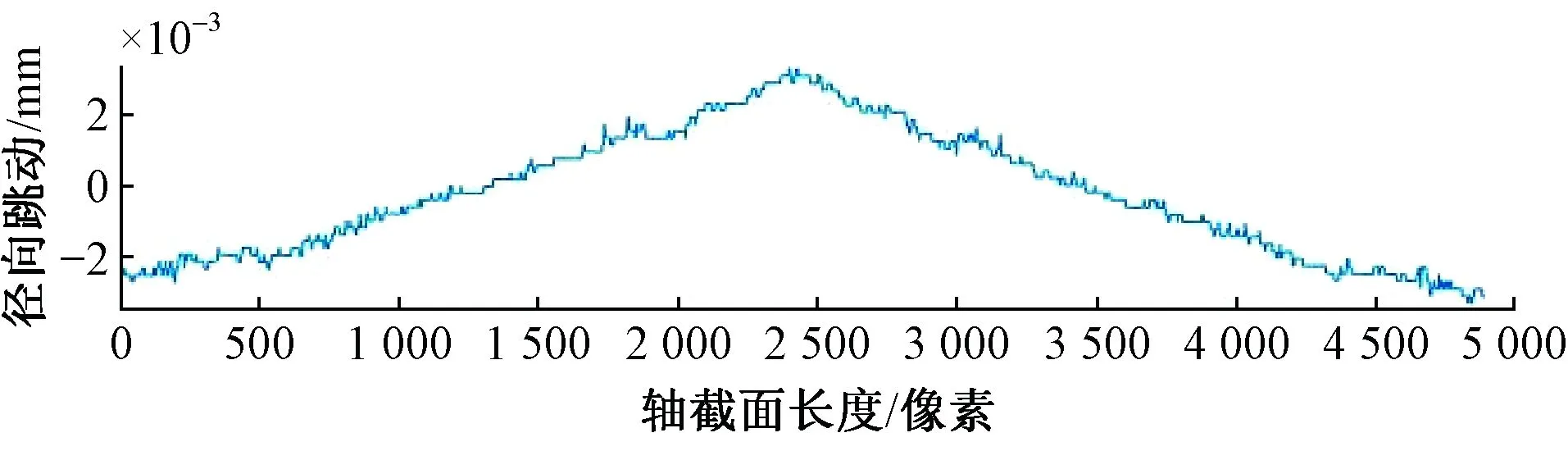
圖6 差值變化曲線Fig.6 Distance difference curve
表1所示為羅拉導柱旋轉1周得到12幀軸截面上的徑向圓跳動測量值,以及人工采用千分表任選12個測量表面的測量值。
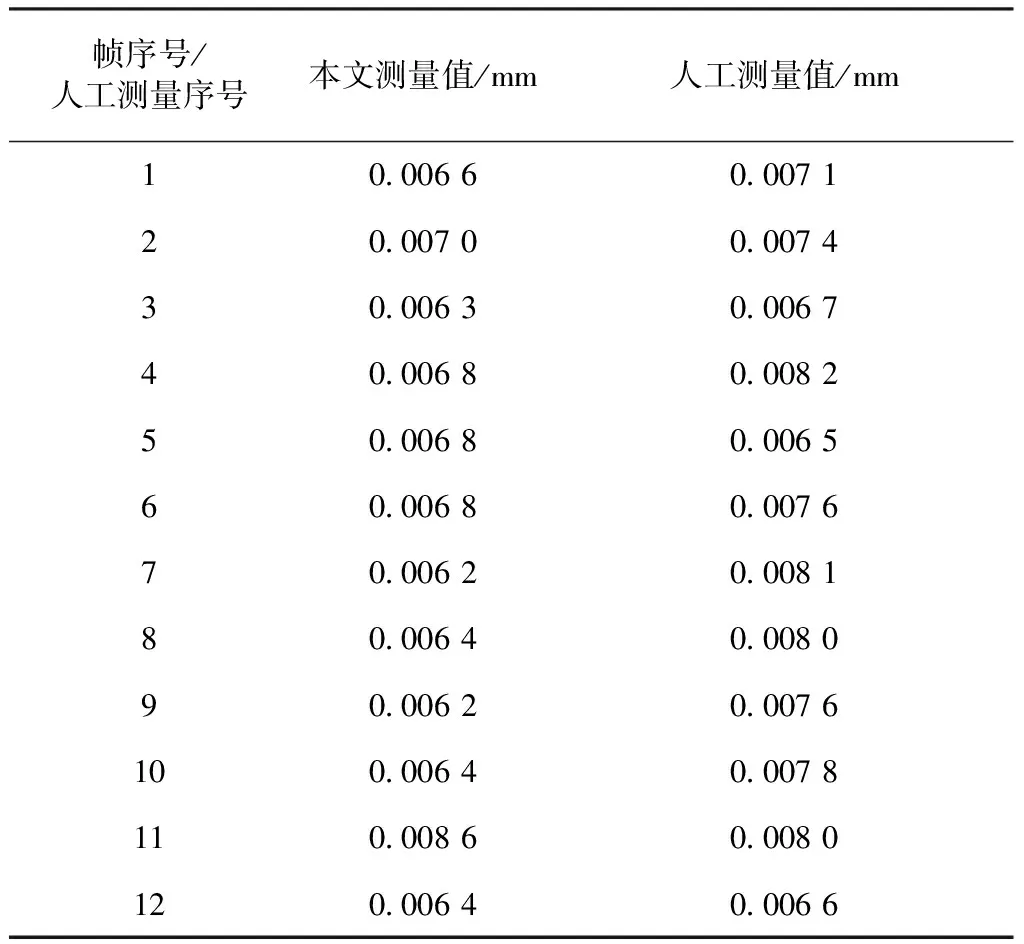
表1 羅拉導柱的徑向圓跳動測量值Tab.1 Measured radial circular runout of roller guide post
由表1可知,本文方法與人工測量方法的測量值均小于徑向圓跳動公差0.015 mm,表明該羅拉導柱的徑向圓跳動合格。本文方法所測量的徑向圓跳動的標準差為6.1×10-4,人工測量方法的標準差為6.6×10-4,可見本文測量方法達到了人工測量的精度,且能夠定量表達羅拉導柱軸向表面的跳動狀態,算法平均耗時0.67 ms。
4.2.2 誤差分析
羅拉導柱的旋轉角度直接影響測量精度與效率,旋轉間隔角度越小,導柱面采樣點越多,越能夠表征羅拉導柱的表面特征,但是速度較慢,測量效率低;旋轉間隔角度越大,導柱面采樣點越少,影響羅拉導柱的表面特征,但是速度較快,效率高。本文在不同旋轉間隔角度下對任取的3個羅拉導柱進行徑向圓跳動的測量,結果如圖7所示。
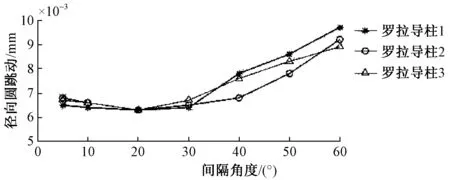
圖7 不同旋轉間隔角度的測量值Fig.7 Measured values of different rotation interval angles
由圖7可知,在旋轉間隔角度在10°~30°之間時,羅拉導柱的徑向圓跳動測量值變化平穩,最大偏差為0.005 mm,說明間隔角度越小不會降低測量精度,且測量值之間的偏差很小。當旋轉間隔角度大于40°后,由于間隔增加,軸截面序列圖片的數量下降,導致測量的誤差增大。因此為了保證精度及效率,旋轉角度一般選取在20°~30°之間。
5 結 論
① 針對紡織針梳機牽伸羅拉導柱圓跳動的人工接觸式測量檢測精度不穩定、效率低等問題,提出基于機器視覺的牽伸羅拉導柱圓跳動檢測方法,通過實驗數據分析,本文方法測量的羅拉導柱徑向圓跳動均在公差范圍內,標準差為6.1×10-4,達到了人工測量的精度,算法平均耗時0.67 ms,具有非接觸、快速、準確的特點,滿足產品檢測的需求。
②采用背光成像消除了羅拉導柱表面的光反射影響,以Canny算子對羅拉導柱的軸截面圖像進行像素級邊緣檢測,利用三項式函數對羅拉導柱像素級邊緣進行最小二乘擬合,確定羅拉導柱邊緣輪廓分布位置,提高了亞像素邊緣點的定位精度。
③建立了基于圖像域的羅拉導柱徑向圓跳動測量模型,對獲取的羅拉軸截面圖像,以基準要素羅拉頸圓柱面構建最小二乘基準軸線,根據徑向圓跳動的定義,以最小區域法建立了羅拉導柱的徑向圓跳動測量模型。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00