高速公路同向曲線路段車輛行駛軌跡研究
2022-10-01 12:08:22張軍華郭筱穆
工程與建設(shè) 2022年4期
關(guān)鍵詞:駕駛員
張軍華, 郭筱穆
(1.安徽省交通規(guī)劃設(shè)計(jì)研究總院股份有限公司,安徽 合肥 230088; 2.公路交通節(jié)能環(huán)保技術(shù)交通運(yùn)輸行業(yè)研發(fā)中心,安徽 合肥 230088; 3.國(guó)家開發(fā)銀行遼寧省分行,遼寧 沈陽 110014)
0 引 言
近年來,我國(guó)高速公路迅猛發(fā)展,并將戰(zhàn)略重心放在“老少邊窮”地區(qū)。這些地區(qū)往往地形崎嶇復(fù)雜,在設(shè)計(jì)時(shí)會(huì)受到多方面的限制,因此在設(shè)計(jì)的過程中需要在滿足規(guī)范的前提下進(jìn)行設(shè)計(jì)指標(biāo)的相應(yīng)調(diào)整。公路平面線形由直線、圓曲線及緩和曲線三種線形單元組成,路線設(shè)計(jì)規(guī)范[1]對(duì)不同組合形式下的各基本單元做出了相應(yīng)的要求。平曲線由于能夠避免長(zhǎng)直線引起的駕駛疲勞和更好適應(yīng)地形的優(yōu)點(diǎn),成了平面設(shè)計(jì)的主要組成部分。但是,平曲線也會(huì)由于增加了駕駛員的操作難度而引發(fā)相關(guān)的安全問題。有關(guān)資料表明,大部分交通事故發(fā)生在平曲線路段,在美國(guó)達(dá)到40%,在中國(guó)達(dá)到36%[2]。因此,平曲線的設(shè)計(jì)對(duì)于公路平面整體的安全性具有重要的影響。平曲線路段是由圓曲線+直線+圓曲線構(gòu)成的,主要包括同向曲線與反向曲線兩類,本文的研究對(duì)象為同向曲線。同向曲線指的是兩個(gè)轉(zhuǎn)向相同的相鄰圓曲線中間連以直線所形成的平面線形。同向曲線在設(shè)計(jì)時(shí)主要需要考慮曲線間的短直線長(zhǎng)度,因?yàn)榍€間直線長(zhǎng)度過短會(huì)引起駕駛員的視覺誤判,容易從視覺上忽略,而把兩個(gè)曲線看成一個(gè)曲線;當(dāng)直線長(zhǎng)度不足以將兩個(gè)曲線完全獨(dú)立時(shí),容易把中間的直線段看成反彎的斷背曲線[3],這對(duì)車輛的安全行駛產(chǎn)生了嚴(yán)重的影響。
目前國(guó)內(nèi)外對(duì)于同向曲線間最短直線長(zhǎng)度的要求都有相應(yīng)的規(guī)定。我國(guó)規(guī)范規(guī)定[1]兩曲線間以直線徑相連接時(shí),直線的長(zhǎng)度不宜過短,設(shè)計(jì)速度大于或等于60 km/h時(shí),同向曲線間最小直線長(zhǎng)度(以m計(jì))以不小于設(shè)計(jì)速度(以km/h計(jì))的6倍為宜。美國(guó)對(duì)最小直線長(zhǎng)度沒有進(jìn)行規(guī)定[4],而是根據(jù)不同的設(shè)計(jì)速度對(duì)平曲線長(zhǎng)度提出不同的要求。日本對(duì)于同向曲線間的短直線長(zhǎng)度也未做出規(guī)定,有日本學(xué)者通過透視圖檢查,同向曲線間直線長(zhǎng)度最好避免在500~700 m。德國(guó)作為世界上最早對(duì)最短直線長(zhǎng)度進(jìn)行規(guī)定的國(guó)家,提出了最小長(zhǎng)度為設(shè)計(jì)車速6倍的要求[5]。我國(guó)現(xiàn)行的規(guī)范則是主要參考了德國(guó)規(guī)范的取值,但是對(duì)于這一取值的具體意義沒有進(jìn)行相應(yīng)的解釋說明。國(guó)內(nèi)學(xué)者對(duì)于同向曲線間的短直線合理長(zhǎng)度進(jìn)行了深入的研究,早期張正云和劉遵紀(jì)[6]從力學(xué)、舒適性和經(jīng)濟(jì)性角度對(duì)斷背曲線的定量問題進(jìn)行探討,認(rèn)為力學(xué)條件對(duì)定量斷背曲線沒有控制意義,當(dāng)直線長(zhǎng)度達(dá)到設(shè)計(jì)車速的6秒行程以上就能滿足駕駛員操作需要,從駕駛員視覺連貫性和舒適性方面考慮才有了6倍速度(6V)的要求。在北京工業(yè)大學(xué)賀玉龍和鄭柯的博士論文[7,8]中則分別考慮了運(yùn)行速度以及駕駛員心生理反應(yīng)等因素對(duì)同向曲線間的短直線長(zhǎng)度進(jìn)行了研究。張榮潔[9]認(rèn)為同向曲線之間的最小直線長(zhǎng)度,隨著曲線半徑的增大而減小,當(dāng)半徑大于一定值 (約為600 m)后,直線最小長(zhǎng)度穩(wěn)定在220 m左右。
總而言之,目前的研究在考慮同向曲線間短直線長(zhǎng)度時(shí),主要以是否引起反彎錯(cuò)覺為判斷依據(jù),但是對(duì)于反彎錯(cuò)覺的界定標(biāo)準(zhǔn)又存在很大的主觀性,因此對(duì)于同向曲線間的短直線長(zhǎng)度進(jìn)行定量化研究具有重要的意義。本文利用UC-win/Road軟件進(jìn)行不同設(shè)計(jì)條件下的工況仿真模擬,得到了在不同平面設(shè)計(jì)指標(biāo)和車速情況下的行車軌跡,量化分析行車速度、圓曲線半徑及同向曲線之間直線長(zhǎng)度對(duì)同向曲線路段最大橫向偏移量的影響顯著性,同時(shí)對(duì)比分析同向曲線之間具有不同直線長(zhǎng)度的同向曲線路段橫線偏移值沿道路縱向分布規(guī)律,從行車軌跡角度對(duì)同向曲線路段進(jìn)行綜合分析。
1 同向曲線行車特性
在進(jìn)行同向曲線設(shè)計(jì)時(shí),主要考慮了短直線長(zhǎng)度不足引起的駕駛員視覺誤判和操作困難問題。在同向曲線之間插入短直線被稱為“斷背曲線”。“斷背曲線”不僅會(huì)破壞線形的連續(xù)性,甚至?xí)柜{駛員產(chǎn)生錯(cuò)覺,如圖1所示,把線形看成兩段同向彎曲的連續(xù)曲線中間插入一個(gè)反向彎曲曲線,在行車過程中,駕駛員常因未能注意到曲線半徑的變化,不能及時(shí)調(diào)整方向及行駛速度而發(fā)生事故。此外,保證駕駛員操縱方向盤不感到困難的行程長(zhǎng)度至少有6秒的行駛時(shí)間,這是因?yàn)橥粋€(gè)方向轉(zhuǎn)動(dòng)方向盤最少需要3秒。若直線長(zhǎng)度過短,將會(huì)導(dǎo)致駕駛員操縱方向盤困難,引發(fā)交通事故[10]。
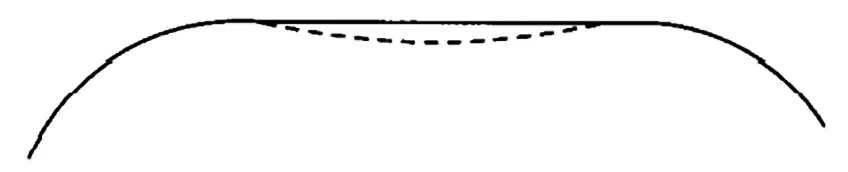
圖1 斷背曲線的錯(cuò)覺
車輛在曲線路段行駛時(shí),由于受到視距不良和線性限制的原因,駕駛?cè)藛T會(huì)通過不斷調(diào)整車速和轉(zhuǎn)向來使車輛安全通過曲線,因此車輛在通過曲線路段時(shí)很難完全沿著設(shè)計(jì)的行車道中心線進(jìn)行行駛。而實(shí)際的行車軌跡也會(huì)由于車速和平面半徑的不同而有所區(qū)別。鄧天民等[11]的研究,根據(jù)軌跡橫向偏移率的聚類結(jié)果,得到山區(qū)公路曲線路段有6種軌跡模式,具有明顯的多樣性特征;而且平曲線半徑越小,切彎效應(yīng)越大,事故風(fēng)險(xiǎn)可控,駕駛?cè)嗽絻A向于采用切彎方式來通過彎道,曲線路段是否發(fā)生切彎行為的臨界半徑值為 200 m。由于曲線的存在,大型車和小型車駛于基本型曲線時(shí),于彎道內(nèi)側(cè)QZ斷面軌跡橫向偏移量最小,而于彎道外側(cè)QZ斷面軌跡橫向偏移量最大,當(dāng)駕駛員對(duì)連續(xù)彎道路況較為熟悉或者行車過程逐漸適應(yīng)彎道頻繁轉(zhuǎn)向后,傾向于靠近道路中心線行駛。李晨[12]提出了車輛在通過曲線路段時(shí)主要有4種軌跡模式,并分別介紹了每一種軌跡模式所對(duì)應(yīng)的條件,這4種軌跡模式分別是正常軌跡、漂移型軌跡、校正型軌跡和切彎型軌跡。一般情況而言,駕駛?cè)藭?huì)根據(jù)期望產(chǎn)生相應(yīng)的期望速度與期望軌跡,當(dāng)實(shí)際情況發(fā)生變化時(shí),行車軌跡和速度就會(huì)做出相應(yīng)調(diào)整。邢大偉[13]提出視覺作為駕駛員獲取信息的主要途徑,約85%以上的信息都依靠視覺獲得,因此視覺感知特性直接影響到駕駛員的操作與車輛的運(yùn)行狀態(tài)。綜上,行車軌跡能間接反映駕駛員對(duì)于路況信息的處理。
因此,為了研究車輛在通過同向曲線路段時(shí)的橫向穩(wěn)定性,以軌跡橫向偏移值為研究對(duì)象,綜合考慮車速、半徑以及曲線間短直線長(zhǎng)度的影響,本文以此為切入點(diǎn),對(duì)同向曲線路段車輛進(jìn)行駕駛仿真實(shí)驗(yàn)。通過得到的實(shí)際軌跡數(shù)據(jù),首先分析了影響行車軌跡最大橫向偏移量的影響因素以及影響強(qiáng)弱,其次對(duì)于橫向軌跡偏移量在不同設(shè)計(jì)車速和半徑下的縱向分布規(guī)律進(jìn)行了總結(jié)與分析。
2 駕駛仿真實(shí)驗(yàn)設(shè)計(jì)
目前關(guān)于車輛行車軌跡的獲取方法主要分為實(shí)車實(shí)驗(yàn)法、計(jì)算機(jī)仿真法和駕駛模擬仿真法等三大類。具體如下。
(1) 實(shí)車實(shí)驗(yàn)法:實(shí)驗(yàn)者駕駛車輛在選定的實(shí)驗(yàn)路段行駛,通過無人機(jī)攝影,路側(cè)安置的攝像機(jī)、傳感器等來捕捉車輛運(yùn)行軌跡或在特定斷面的橫向偏移值。例如,F(xiàn)itzsimmons等[14]通過路面充氣管來記錄曲線路段的軌跡和速度,分析了軌跡橫向偏移以及切彎行為。符鋅砂、林慧等[15]均采用了路側(cè)攝像來獲取軌跡偏移。
(2) 計(jì)算機(jī)仿真法:應(yīng)用電子計(jì)算機(jī)實(shí)現(xiàn)對(duì)道路、車輛、駕駛員及環(huán)境的全面模擬,相應(yīng)模型均為特定的算法或程序。常見的計(jì)算機(jī)仿真法軟件有Carsim、Trucksim等。
(3) 駕駛模擬仿真法:實(shí)驗(yàn)者通過操縱駕駛模擬器,在搭建的虛擬實(shí)驗(yàn)道路上行駛,通過軟件系統(tǒng)自帶的數(shù)據(jù)記錄、輸出功能獲取行車軌跡數(shù)據(jù)。與計(jì)算機(jī)仿真法將特定程序作為駕駛員決策模型不同,駕駛模擬仿真法是駕駛員通過操縱駕駛模擬器來對(duì)駕駛決策進(jìn)行輸入,主導(dǎo)者仍是人。常見平臺(tái)如同濟(jì)大學(xué)的交通行為與交通安全模擬實(shí)驗(yàn)平臺(tái),長(zhǎng)安大學(xué)的六自由度汽車性能虛擬仿真實(shí)驗(yàn)平臺(tái)、2自由度UC-win/Road運(yùn)動(dòng)仿真平臺(tái)等。
結(jié)合上述內(nèi)容,總結(jié)各方法優(yōu)缺點(diǎn)見表1。

表1 行車軌跡獲取方法對(duì)比
本研究的目的是探討高速公路短直線路段在不同平面設(shè)計(jì)指標(biāo)及行車速度下的行車軌跡特性,在現(xiàn)實(shí)道路上選擇具有不同平面設(shè)計(jì)指標(biāo)的實(shí)驗(yàn)路段并開展實(shí)車實(shí)驗(yàn)十分困難;此外,實(shí)車實(shí)驗(yàn)也僅能獲取部分?jǐn)嗝娴能壽E橫向偏移值,并存在一定的安全隱患,因此本研究放棄采用實(shí)車實(shí)驗(yàn)法。
對(duì)于計(jì)算機(jī)仿真法和駕駛模擬仿真法,兩者在構(gòu)建道路模型方面差別不大,計(jì)算機(jī)仿真法在車輛模型方面更為精確,而駕駛模擬仿真法在駕駛員決策方面更加貼近實(shí)車駕駛情況;在數(shù)據(jù)采集方面,軟件系統(tǒng)自帶的數(shù)據(jù)采集、輸出功能均較為強(qiáng)大,基本可認(rèn)為能采集任意位置的行車軌跡數(shù)據(jù),因此均可滿足實(shí)驗(yàn)數(shù)據(jù)采集的要求。而行車軌跡可間接反映駕駛員感知道路、環(huán)境等信息,通過大腦分析處理后,并采取相應(yīng)駕駛操作的結(jié)果,該過程受駕駛員影響較大。綜上,本研究采用駕駛模擬仿真方法獲取行車軌跡數(shù)據(jù)。
2.1 道路模型
如圖2所示,要確定一個(gè)短直線路段的平面線形,需要輸入的指標(biāo)包括兩端的直線段長(zhǎng)度L1和L3;第一段曲線及第二段曲線之間的直線長(zhǎng)度L2;第一段曲線的圓曲線半徑R1,及其兩端的回旋線參數(shù)A11,A12;第二段曲線的圓曲線半徑R2,及其兩端的回旋線參數(shù)A21,A22。本研究主要探討短直線路段圓曲線半徑(圖2中R1及R2)、同向曲線之間直線長(zhǎng)度(圖2中L2)以及通過短直線路段的行車速度對(duì)短直線路段行車軌跡的影響。同時(shí)采用正交實(shí)驗(yàn)設(shè)計(jì)實(shí)驗(yàn)方案。
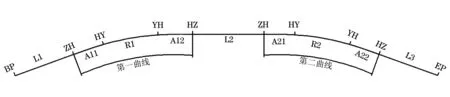
圖2 短直線路段示意圖
本研究將以上三個(gè)因素均劃分為三種水平。其中,通過直線路段的行車速度分別采用80 km/h、100 km/h、120 km/h,分別與高速公路常用的設(shè)計(jì)速度相對(duì)應(yīng)。短直線路段的圓曲線半徑分別采用800 m、1400 m、2000 m,分別與設(shè)計(jì)速度80 km/h、100 km/h、120 km/h時(shí)圓曲線半徑一般值相對(duì)應(yīng)。根據(jù)《公路路線設(shè)計(jì)規(guī)范》同向曲線之間直線長(zhǎng)度小于設(shè)計(jì)速度6倍形成短直線路段, 因此本研究也將同向曲線之間的長(zhǎng)度劃分為三種水平0~2 V,2~4 V,4~6 V,同時(shí)分別取其中值1 V、3 V、5 V進(jìn)行道路模型構(gòu)建。因素水平劃分見表2。
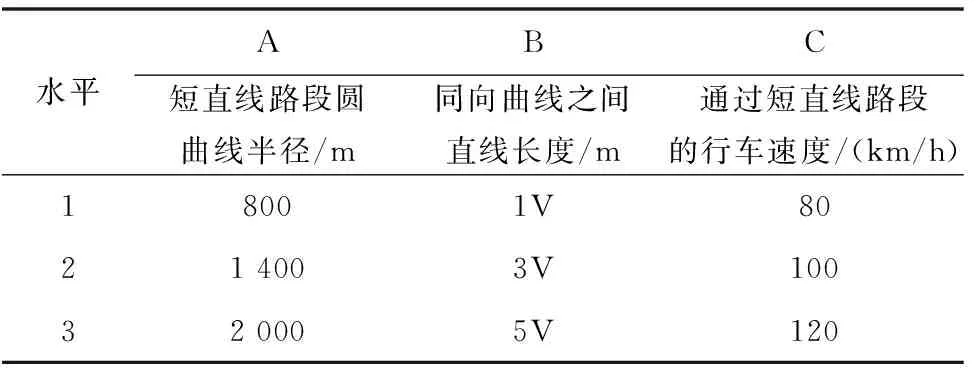
表2 因素水平表
同時(shí),選用合適的正交實(shí)驗(yàn)表L9(34)進(jìn)行實(shí)驗(yàn)方案設(shè)計(jì),具體見表3。
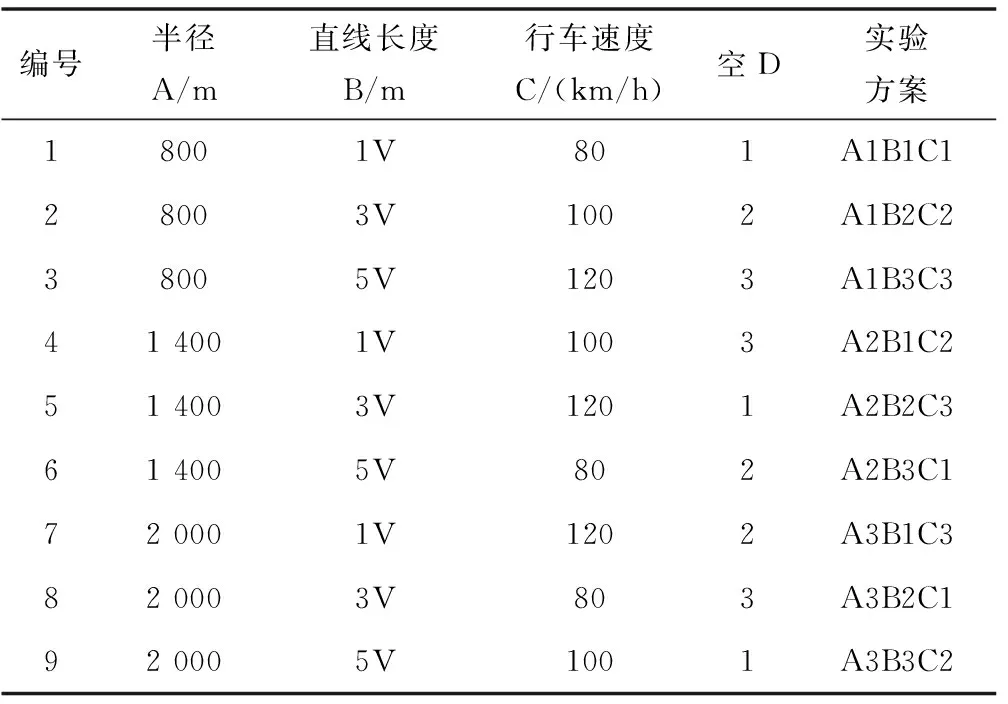
表3 正交實(shí)驗(yàn)方案
除了以上三個(gè)參數(shù)外,為使車輛到達(dá)曲線路段時(shí)能夠達(dá)到預(yù)定的行車速度,本研究在曲線路段兩側(cè)設(shè)置了兩個(gè)直線段L1、L3,兩段長(zhǎng)度均為1 km。緩和曲線參數(shù)A11、A12、A21、A22取值則參考《公路路線設(shè)計(jì)規(guī)范》相關(guān)要求,同時(shí)兼顧超高過渡長(zhǎng)度、最小緩和曲線長(zhǎng)度的要求。本研究中用到的實(shí)驗(yàn)路段具體參數(shù)見表4。
本研究主要探討短直線路段平面設(shè)計(jì)指標(biāo)及通過短直線路段的行車速度與短直線路段行車軌跡之間的關(guān)系,因此在道路建模時(shí)道路縱斷面采用直坡段,未設(shè)置豎曲線。此外,為減小縱坡對(duì)實(shí)驗(yàn)結(jié)果的影響,本研究道路縱坡采用0.3%,道路縱斷面圖如圖3所示。

圖3 道路縱斷面參數(shù)標(biāo)定
本研究道路橫斷面采用國(guó)內(nèi)雙向四車道高速公路常用橫斷面組成,其路幅組成為:0.75 m土路肩+3 m硬路肩+2×3.75 m行車道+0.75 m左側(cè)路緣帶+2 m中央分隔帶+0.75 m左側(cè)路緣帶+2×3.75 m行車道+3 m硬路肩+0.75 m土路肩=24.5 m。本研究標(biāo)準(zhǔn)橫斷面如圖4所示,標(biāo)準(zhǔn)斷面路幅寬度24.5 m,行車道、硬路肩橫坡均采用2%。應(yīng)當(dāng)注意,道路位于曲線路段時(shí),會(huì)隨著圓曲線半徑、設(shè)計(jì)速度等的變化采用不同的超高值,本研究對(duì)道路的超高進(jìn)行標(biāo)定,不同路段超高取值按照《公路路線設(shè)計(jì)規(guī)范》(JTG D20—2017)進(jìn)行取值,例如設(shè)計(jì)速度為80 km/h、圓曲線半徑為800 m時(shí),該路段行車道、硬路肩超高均采用4%。不同路段之間的超高過渡可通過添加Transition來進(jìn)行設(shè)置,設(shè)置完成后其會(huì)在道路縱斷面圖中進(jìn)行位置示意。某工況下UC-win/Road道路模型如圖5所示。
圖4 道路橫斷面參數(shù)標(biāo)定

圖5 道路模型
2.2 車輛模型
UC-win/Road車輛模型主要包括車輛3D模型及其動(dòng)力學(xué)模型兩部分。本研究以小型車為研究對(duì)象開展仿真實(shí)驗(yàn),參考《公路工程設(shè)計(jì)標(biāo)準(zhǔn)》中對(duì)車輛寬度、軸距等相關(guān)要求,在UC-win/Road中對(duì)車輛3D模型進(jìn)行參數(shù)標(biāo)定,如軸距設(shè)置為2.5 m,車輛寬度設(shè)置為1.8 m等。相關(guān)參數(shù)設(shè)定如圖6所示。
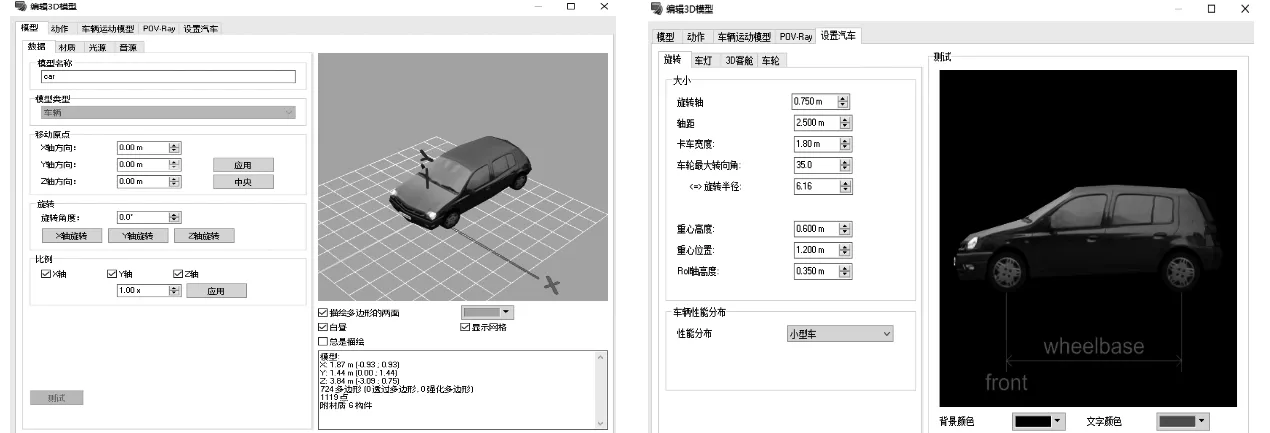
圖6 車輛參數(shù)標(biāo)定
車輛動(dòng)力學(xué)方面,UC-win/Road除了可采用其自身車輛動(dòng)力學(xué)外,還可采用INNOSIMULATION車輛動(dòng)力學(xué)以及CarSim車輛動(dòng)力學(xué),本研究采用UC-win/Road車輛動(dòng)力學(xué)。
2.3 實(shí)驗(yàn)方案
建立完仿真模型后,即可開展駕駛模型仿真實(shí)驗(yàn)。對(duì)于駕駛?cè)说倪x取,本次駕駛實(shí)驗(yàn)由15位志愿者實(shí)際操作,在所建立的道路模型中進(jìn)行無干擾的自由駕駛,平均每人駕駛次數(shù)為2次,每個(gè)工況得到約30組樣本。仿真結(jié)束后,即可得到車輛行駛軌跡。志愿者由10名男性駕駛員和5名女性駕駛員組成,駕駛年齡主要是3~5年,具有相對(duì)充分的駕駛經(jīng)驗(yàn)。根據(jù)得到的實(shí)驗(yàn)結(jié)果,對(duì)每組工況下的所有樣本數(shù)據(jù)進(jìn)行平均值計(jì)算。
本研究采用車輛重心偏移相應(yīng)行車道重心線的距離分析短直線路段行車軌跡特性,而UC-win/Road駕駛模擬器輸出的行車軌跡為車輛左側(cè)輪胎至左邊界的距離或右側(cè)輪胎至右邊界的距離(圖7中的A或B)。因此,需要將其轉(zhuǎn)化為車輛重心偏移相應(yīng)行車道中心線的距離(圖7中L),以便后文分析車輛的橫向偏移特性。轉(zhuǎn)換公式為:
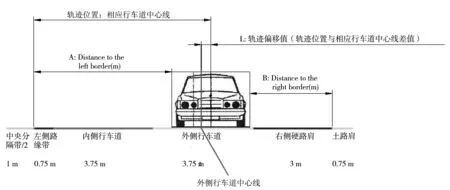
圖7 L與A、B關(guān)系示意圖
式中:L為車輛重心與相應(yīng)行車道中心線距離,m;
A為車輛左側(cè)輪胎至左側(cè)邊界距離,m;
B為車輛右側(cè)輪胎至左側(cè)邊界距離,m。
根據(jù)L定義以及圖7可知,L為負(fù)值時(shí),表示車輛向右側(cè)偏移;L為正值時(shí),表示車輛向左側(cè)偏移。
3 仿真結(jié)果分析
3.1 最大橫向偏移值
本研究按前文所述的實(shí)驗(yàn)方案進(jìn)行駕駛仿真實(shí)驗(yàn),得到了駕駛員采用不同行車速度通過不同圓曲線半徑、不同短直線長(zhǎng)度的短直線路段時(shí)車輛的最大橫向偏移值,不同實(shí)驗(yàn)方案下最大橫向偏移值仿真結(jié)果,見表5。
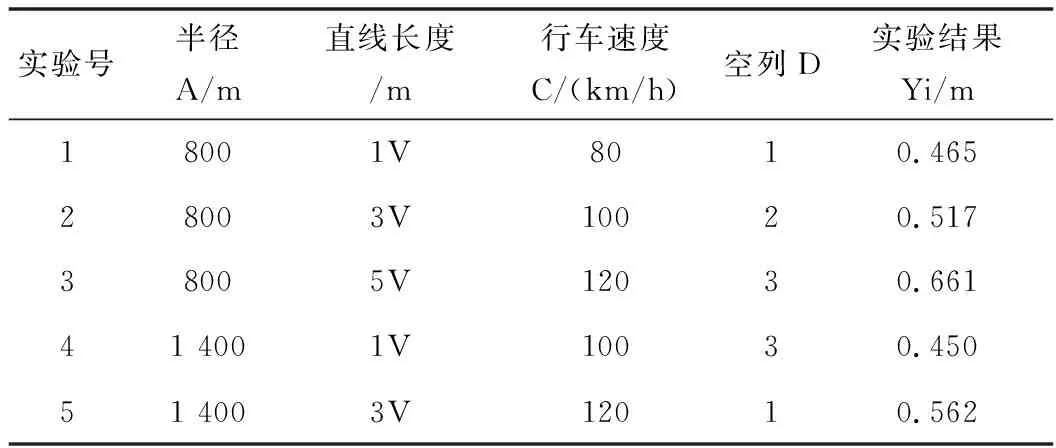
表5 最大橫向偏移值
續(xù)表
對(duì)正交試驗(yàn)結(jié)果的分析方法主要有兩種,一種是極差分析(直觀分析),另一種是方差分析。極差分析原理簡(jiǎn)單,可排出影響因素的主次順序,并確定最優(yōu)水平的搭配,但無法判斷考察因素對(duì)試驗(yàn)結(jié)果的影響是否顯著,也無法確定考察因素的顯著性水平;方差分析除了具有極差分析功能外,克服了極差分析的缺陷,但其分析過程較為復(fù)雜[16]。本研究需確定行車速度、圓曲線半徑以及同向曲線之間直線長(zhǎng)度對(duì)軌跡最大橫向偏移量的影響是否顯著,并確定相應(yīng)的顯著性水平,因此對(duì)正交試驗(yàn)結(jié)果進(jìn)行方差分析。方差分析相關(guān)原理及計(jì)算方法可參考上文提到的數(shù)理統(tǒng)計(jì),同時(shí)也可借用SPSS、MATLAB、MINITAB等統(tǒng)計(jì)工具進(jìn)行方差分析。
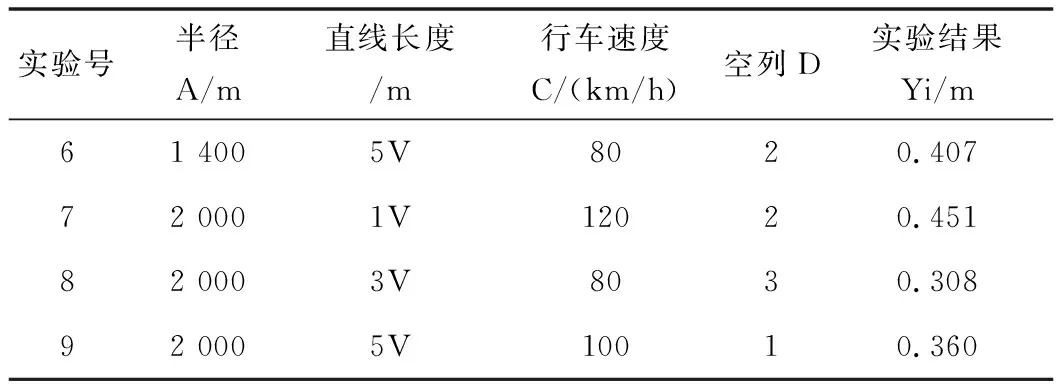
短直線路段行車軌跡最大橫向偏移值方差分析結(jié)果見表6。
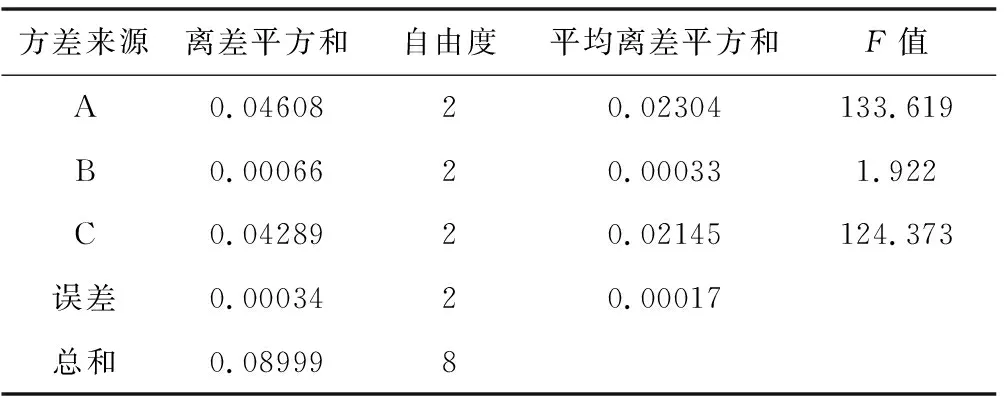
表6 方差分析結(jié)果
當(dāng)給定顯著水平α=0.05時(shí),F(xiàn)分布上側(cè)分位數(shù),F(xiàn)0.05(2,2)=19.000。由表6可知,因素A、C對(duì)應(yīng)F值分別為133.619和124.373,遠(yuǎn)大于F0.05(2,2)=19.000,說明圓曲線半徑,以及通過短直線路段的行車速度對(duì)短直線路段行車軌跡最大橫向偏移值都是非常顯著的。文獻(xiàn)[12]研究結(jié)果與本文研究結(jié)果一致,對(duì)于短直線路段而言,圓曲線半徑以及通過短直線路段的行車速度仍然是影響行車軌跡最大橫向偏移值的兩個(gè)關(guān)鍵因素。根據(jù)表6可知,因素B對(duì)應(yīng)F值為1.922,小于F0.05(2,2)=19.000,說明同向曲線間直線長(zhǎng)度對(duì)短直線路段行車軌跡橫向偏移值不顯著,從道路幾何設(shè)計(jì)指標(biāo)角度來說,其不是影響短直線路段行車軌跡最大橫向偏移值的關(guān)鍵因素。
3.2 橫向偏移值沿道路縱向分布
在圓曲線半徑一定的條件下,同向圓曲線之間采用不同的短直線從而形成不同的短直線路段。本研究以設(shè)計(jì)速度80 km/h,圓曲線半徑采用800 m條件下不同的短直線路段為例,對(duì)短直線路段最大橫向偏移值的位置進(jìn)行分析。仿真實(shí)驗(yàn)時(shí),通過短直線路段的行車速度均采用80 km/h,同向曲線間的直線長(zhǎng)度分別取設(shè)計(jì)速度的1倍(1V)、3倍(3V)、倍(5V),即80 m、240 m和500 m。
本研究在分析短直線路段行車軌跡最大橫向偏移值位置時(shí),為獲得一個(gè)參照標(biāo)準(zhǔn),獲取了基本型曲線路段的行車軌跡數(shù)據(jù)。該基本型曲線圓曲線半徑、轉(zhuǎn)角、緩和曲線參數(shù)及長(zhǎng)度與短直線路段保持一致。
通過駕駛模擬獲取了駕駛員采用80 km/h行車速度通過基本型曲線路段(即直線+緩和曲線+圓曲線+緩和曲線+直線)時(shí)車輛的行車軌跡,其橫向偏移值與樁號(hào)的關(guān)系如圖8所示。
圖8 基本型曲線行車軌跡(單位:m)
結(jié)合前文可知,圖7所采用的實(shí)驗(yàn)路段ZH點(diǎn)樁號(hào)為K1+000,HY點(diǎn)樁號(hào)為K1+100,YH點(diǎn)樁號(hào)為K1+555,HZ點(diǎn)樁號(hào)為K1+655。由圖7可知,車輛進(jìn)入曲線段時(shí),行車軌跡表現(xiàn)為向曲線內(nèi)側(cè)偏移(向右側(cè)偏移),車輛駛出曲線路段時(shí),行車軌跡表現(xiàn)為向曲線外側(cè)偏移(向左側(cè)偏移)。這與文獻(xiàn)[17]研究結(jié)果“車輛右轉(zhuǎn)彎時(shí),入彎至出彎呈現(xiàn)右偏—左偏”相一致。同時(shí),由圖7可以看出向曲線內(nèi)側(cè)的橫向偏移量最大值發(fā)生在K1+150附近,向外側(cè)偏移的橫向偏移量最大值發(fā)生在K1+550附近,即分別發(fā)生在HY和YH點(diǎn)附近。
通過駕駛模擬獲取了駕駛員采用80 km/h行車速度通過采用不同直線長(zhǎng)度(80 m、240 m、400 m)的短直線路段時(shí)車輛的行車軌跡,其橫向偏移值與樁號(hào)的關(guān)系如圖9所示。
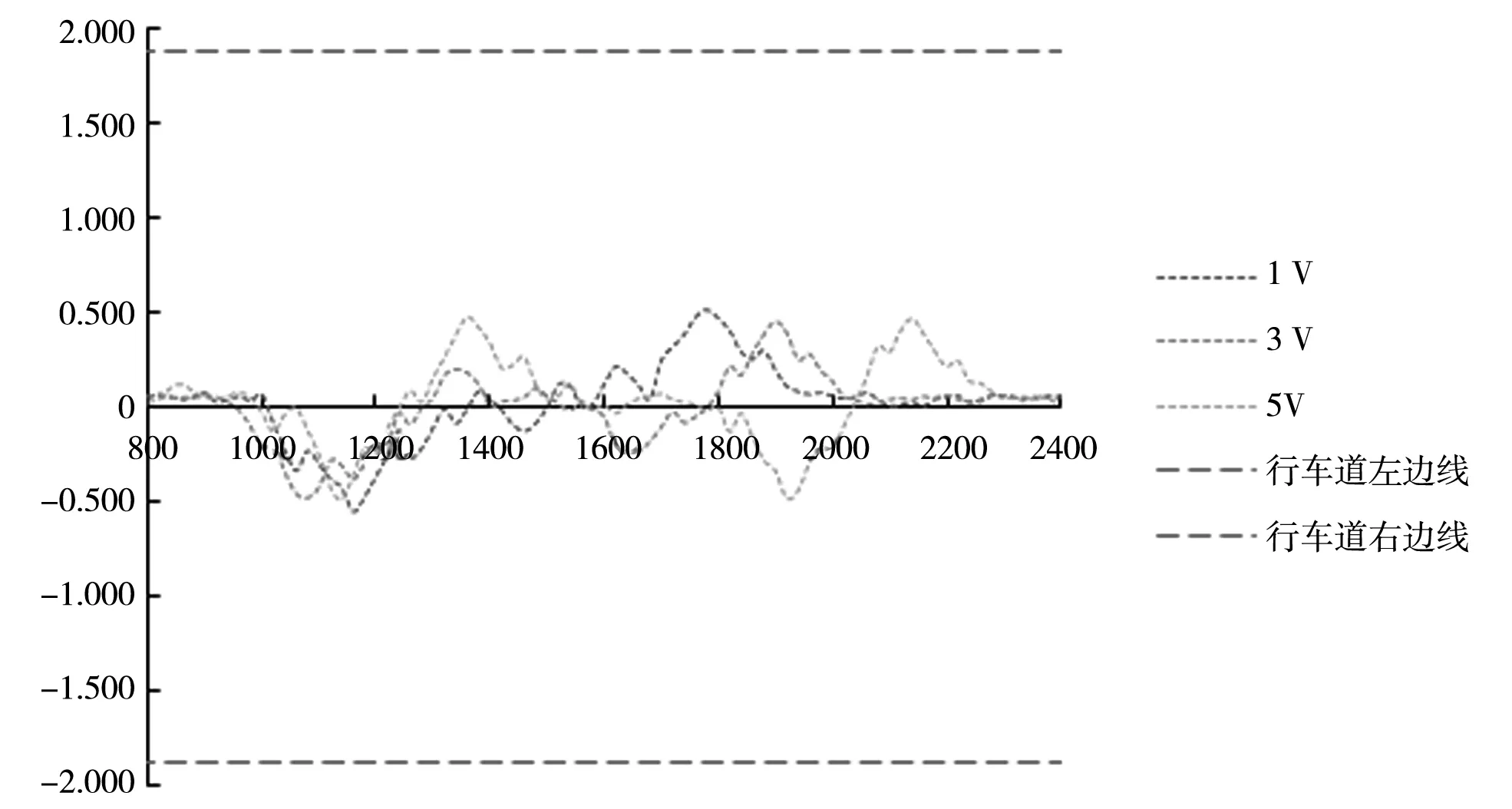
圖9 橫向偏移值(單位:m)
由圖8可知,同向曲線之間分別采用80 m、240 m和400 m所形成的短直線路段其行車軌跡最大橫向偏移值均約為0.5 m,同時(shí)與圖7中基本型曲線路段行車軌跡最大橫向偏移值也較為接近,進(jìn)一步說明了同向曲線之間的直線長(zhǎng)度不是影響短直線路段行車軌跡最大橫向偏移值的主要因素。
同時(shí),由圖8還可發(fā)現(xiàn),當(dāng)同向曲線之間直線長(zhǎng)度較短時(shí)(圖8中的1V),行車軌跡橫向偏移值隨樁號(hào)的變化情況與基本型曲線較為接近,這說明當(dāng)同向曲線之間直線長(zhǎng)度較小時(shí),其往往被駕駛員誤以為是曲線路段,駕駛員即使行駛在短直線上也不會(huì)將方向盤回正,而是與基本型曲線路段類似,采用一定的方向盤轉(zhuǎn)角來通過短直線路段。隨著同向曲線之間直線長(zhǎng)度的增加(圖8中的3V),駛?cè)氲谝欢吻€和駛出第二段曲線時(shí)行車軌跡偏移值隨樁號(hào)變化情況與基本型曲線類似,駕駛員均有向曲線內(nèi)側(cè)或外側(cè)偏移的傾向,而由第一段曲線駛?cè)攵讨本€(駛出第一段曲線)和由短直線駛?cè)氲诙吻€(駛?cè)氲诙吻€)時(shí),駕駛員有向曲線內(nèi)側(cè)或曲線外側(cè)偏移的傾向,但不明顯,這說明駕駛員開始意識(shí)到同向曲線之間的短直線,并具有將方向盤回正的意識(shí),但因直線長(zhǎng)度較短,其沒有充足時(shí)間來完成操作。隨著同向曲線之間直線長(zhǎng)度的進(jìn)一步增加(圖8中的5V),駛?cè)搿Ⅰ偝龅谝欢吻€,或駛?cè)搿Ⅰ偝龅诙吻€時(shí)行車軌跡偏移值隨樁號(hào)變化情況分別與基本型曲線類似,駕駛員在駛?cè)腭偝龅谝欢巍⒌诙吻€時(shí)行車軌跡向內(nèi)側(cè)、外側(cè)偏移的傾向均較為明顯,說明駕駛員已經(jīng)能夠較為清楚地意識(shí)到同向曲線之間的直線路段,并有較為充裕的時(shí)間來將方向盤回正,完成駕駛操作。
4 結(jié) 論
(1) 分析了同向曲線路段最大橫向偏移值與行車速度、圓曲線半徑及同向曲線之間長(zhǎng)度之間的相關(guān)性,發(fā)現(xiàn)圓曲線半徑、行車速度對(duì)其影響較為顯著,而同向曲線之間直線長(zhǎng)度對(duì)其影響不顯著。
(2) 在80 km/h行車速度、圓曲線半徑采用800 m條件下,對(duì)比分析了同向曲線之間長(zhǎng)度分別采用1V、3V、5V所構(gòu)成的同向曲線路段行車軌跡橫向偏移值沿道路縱向的分布規(guī)律,發(fā)現(xiàn)同向曲線之間直線長(zhǎng)度的變化不影響橫向偏移量的峰值(最大橫向偏移量),但對(duì)橫向最大橫向偏移量出現(xiàn)的位置具有顯著影響。
(3) 同向曲線之間長(zhǎng)度較短時(shí)(1V),其行車軌跡縱向變化規(guī)律與基本型曲線類似,僅在駛?cè)氲谝欢吻€及駛出第二段曲線時(shí)有較為明顯的橫向偏移;當(dāng)同向曲線之間長(zhǎng)度較大時(shí)(5V),在駛?cè)腭偝龅谝欢吻€,駛?cè)腭偝龅诙吻€時(shí)均有較為明顯的橫向偏移;而當(dāng)同向曲線之間長(zhǎng)度適中時(shí)(3V),在駛出第一段曲線及駛?cè)氲诙吻€時(shí)有一定的橫向偏移,但不明顯。
(4) 僅分析了同向曲線路段最大行車軌跡偏移值與圓曲線半徑、同向曲線之間直線長(zhǎng)度、行車速度之間的相關(guān)性,后續(xù)研究中可建立同向曲線路段最大行車軌跡偏移值的預(yù)測(cè)模型。
(5) 在建立道路模型時(shí),第一段曲線半徑R1與第二段曲線半徑R2采用了同一半徑,同時(shí)第一段曲線緩和曲線參數(shù)A11、A12與第二段曲線緩和曲線參數(shù)A21、A22均相等,后續(xù)可研究參數(shù)以上參數(shù)取值的變化對(duì)同向曲線路段行車軌跡的影響。
猜你喜歡
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
活力(2019年22期)2019-03-16 12:46:58
汽車電器(2018年1期)2018-06-05 01:22:54
紅土地(2016年6期)2017-01-15 13:45:55
汽車與安全(2016年5期)2016-12-01 05:22:10
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2014年7期)2014-02-27 07:28:09
解放軍生活(2013年5期)2013-04-29 21:51:50