基于Yolo算法的交通錐標(biāo)顏色檢測
2022-10-02 09:00:00趙梓杉秦玉英衣明悅
汽車實(shí)用技術(shù) 2022年18期
趙梓杉,秦玉英,李 剛,衣明悅
(遼寧工業(yè)大學(xué) 汽車與交通工程學(xué)院,遼寧 錦州 121001)
目標(biāo)檢測在無人駕駛的感知系統(tǒng)中有重要作用,在無人駕駛方程式比賽中,其主要作用是對交通錐標(biāo)的檢測等。
近年來,以卷積神經(jīng)網(wǎng)為基礎(chǔ)的目標(biāo)檢測算法受到學(xué)者們越來越多的重視,許多結(jié)構(gòu)簡單、運(yùn)行效率高的網(wǎng)絡(luò)模型,可以大規(guī)模應(yīng)用這些算法,但是面對目標(biāo)檢測的難點(diǎn),國內(nèi)外的學(xué)者們提出了很多處理方案,并進(jìn)行了大批實(shí)驗(yàn)。例如,ITTI L等為了提取圖像中的特征,構(gòu)建了選擇性注意機(jī)制;VIOLA P和JONES M設(shè)計(jì)了一種級聯(lián)檢測器框架,在人臉檢測領(lǐng)域取得了成功,提高了算法的性能,但其檢測性能嚴(yán)重依賴弱分類器;2014年,HARIHARAN B等提出區(qū)域-卷積神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)的目標(biāo)檢測深度神經(jīng)網(wǎng)絡(luò)在PASCALVOC2012數(shù)據(jù)集上的平均檢測準(zhǔn)確率達(dá)到53.3%;PEDRO F等提出的基于部件的檢測算法,可變形的組件模型,該模型采用改進(jìn)后的方向梯度直方圖特征有利于檢測出現(xiàn)形變的目標(biāo),用一種新Latent支持向量機(jī)分類器進(jìn)行分類,取得了較高的檢測精度。針對一代算法對小目標(biāo)檢測效果不佳、漏檢情況嚴(yán)重等問題,2017年REDMON J等提出Yolov2算法,該模型以Darknet-19為主干網(wǎng)絡(luò);2018年,Yolov3 在原有的Yolov2 網(wǎng)絡(luò)上進(jìn)行改進(jìn),該版本采用全新的主干網(wǎng)絡(luò)Darknet-53,結(jié)合特征金字體網(wǎng)絡(luò),在犧牲檢測速度的前提下,提升了對小目標(biāo)識別的準(zhǔn)確性;2020年,李濤提出基于改進(jìn)的Yolov3-tiny深度學(xué)習(xí)框架開展大賽所使用錐標(biāo)的顏色識別工作,通過少量的卷積層、池化層提取圖像特征,加入了多個(gè)殘差模塊,該算法具有Yolov3的檢測精度,且?guī)蔬_(dá)到 20 f/s。JOCHER G等在2020年提出在Yolov3的基礎(chǔ)上進(jìn)行改進(jìn)的Yolov4,在coco 數(shù)據(jù)集上的平均精確度均值(Mean Average Precision, mAP)為43.5%;識別速率快且精度高的Yolov5,幀率達(dá)到140 f/s。
本文將Yolo算法應(yīng)用在無人駕駛方程式賽車的目標(biāo)檢測系統(tǒng)中,制作了一個(gè)交通錐標(biāo)數(shù)據(jù)集,以Yolov5的算法為基礎(chǔ),算法適用于本實(shí)驗(yàn)所用數(shù)據(jù)集,并適用于無人駕駛方程式比賽特定場景。對原始算法的改進(jìn),根據(jù)數(shù)據(jù)集中真實(shí)邊界框聚類選取初始邊界框尺寸,構(gòu)建一種兼顧檢測精度和檢測速度的算法,以滿足實(shí)時(shí)檢測的需求。
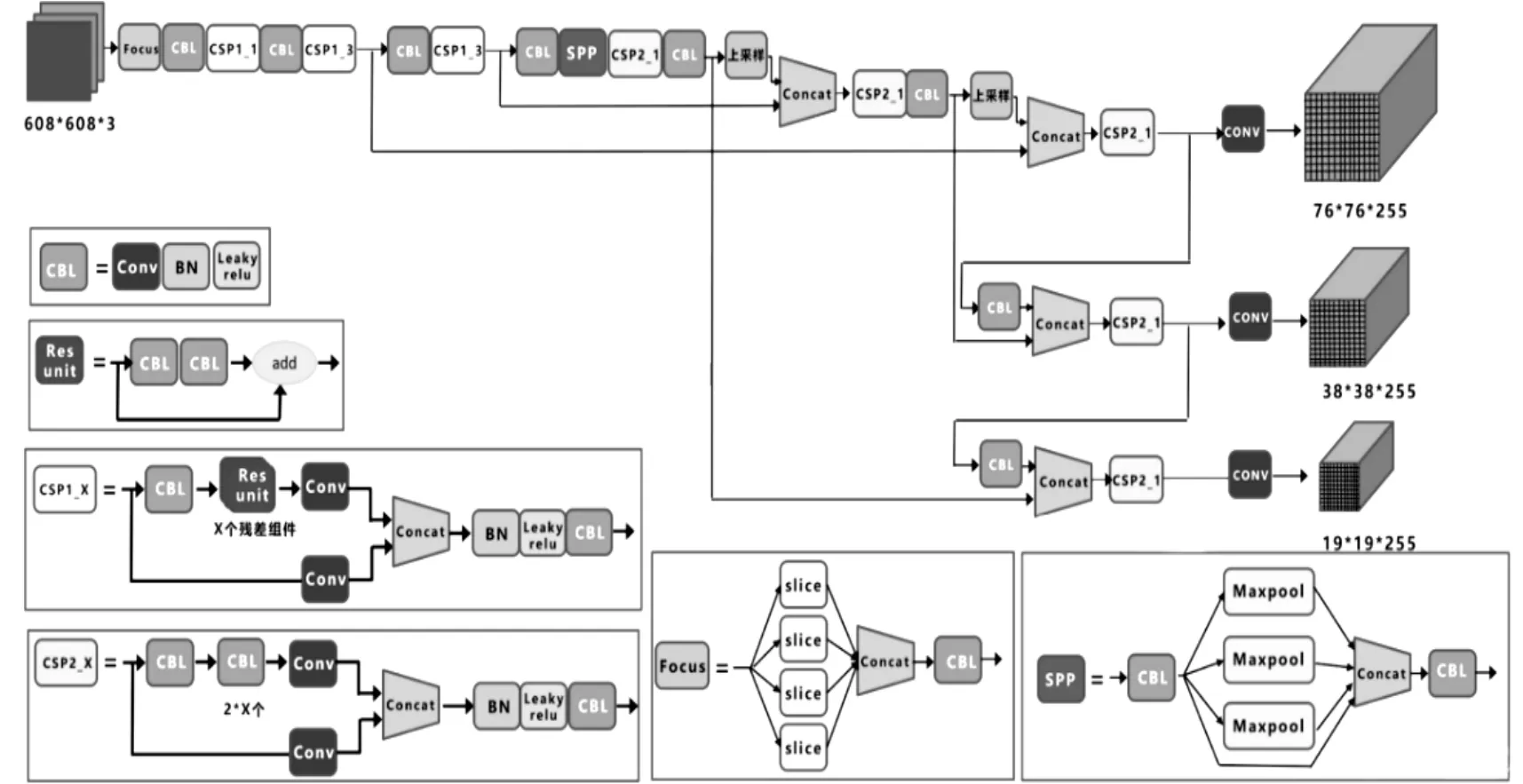
1 Yolov5網(wǎng)絡(luò)模型
Yolov5還是沿用Yolov3、Yolov4的整體布局,將整個(gè)網(wǎng)絡(luò)結(jié)構(gòu)分成Input、Backbone、Neck、Output四個(gè)部分,網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。將Yolov5目標(biāo)檢測算法引入到無人駕駛方程式賽車的感知系統(tǒng)中,最小標(biāo)準(zhǔn)卷積層由卷積層模塊、正則化層模塊和激活函數(shù)模塊組成,張量拼接可以將具有不同通道數(shù)的特征圖拼接到一起。這就意味著在保持寬度和高度不變的同時(shí),增加深度,擴(kuò)張張量的尺寸。
2 實(shí)驗(yàn)與結(jié)果分析
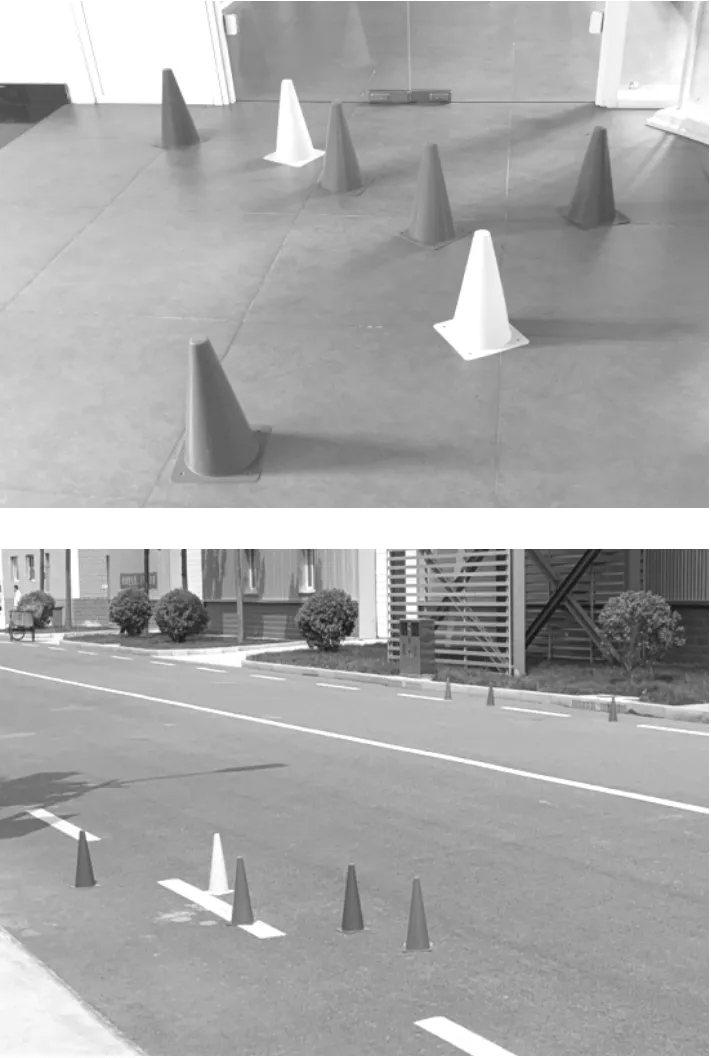
2.1 數(shù)據(jù)集制作
本次實(shí)驗(yàn)自制了一個(gè)交通錐標(biāo)數(shù)據(jù)集,包括三種顏色的錐桶,考慮了不同光照、角度、距離、遮擋等情況,各種示例如圖2所示。使用labelimg工具對圖片中的交通錐標(biāo)進(jìn)行了標(biāo)注。按照8:2的比例將數(shù)據(jù)集換分為訓(xùn)練集和測試集,數(shù)據(jù)集共1 000張圖像,每張圖像包含多個(gè)目標(biāo)。
2.2 YOLOv5網(wǎng)絡(luò)訓(xùn)練
操作系統(tǒng)為Linux Ubuntu18.04;本次實(shí)驗(yàn)操作環(huán)境為中央處理器,其型號分別為Intel Xeon Silver4214、QuadroP2200;開發(fā)語言為Python;安裝統(tǒng)一計(jì)算設(shè)備架構(gòu)11.0庫文件;超參數(shù)中的權(quán)重衰減系數(shù)為0.003 2;Batch大小設(shè)置為4;學(xué)習(xí)率動(dòng)量為0.843;迭代次數(shù)為300。
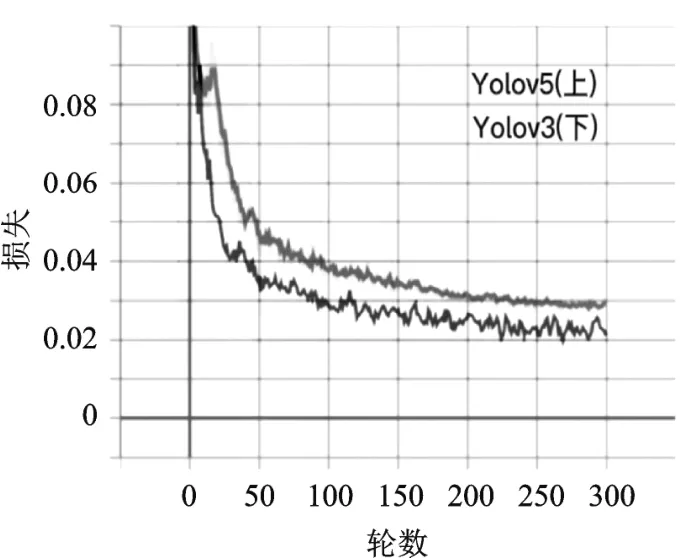
兩種網(wǎng)絡(luò)在訓(xùn)練集上的損失函數(shù)曲線如圖3所示,在相同學(xué)習(xí)率的情況下,Yolov5在訓(xùn)練 200輪時(shí)達(dá)到穩(wěn)定,而Yolov3則訓(xùn)練300輪時(shí)出現(xiàn)了過擬合的情況。
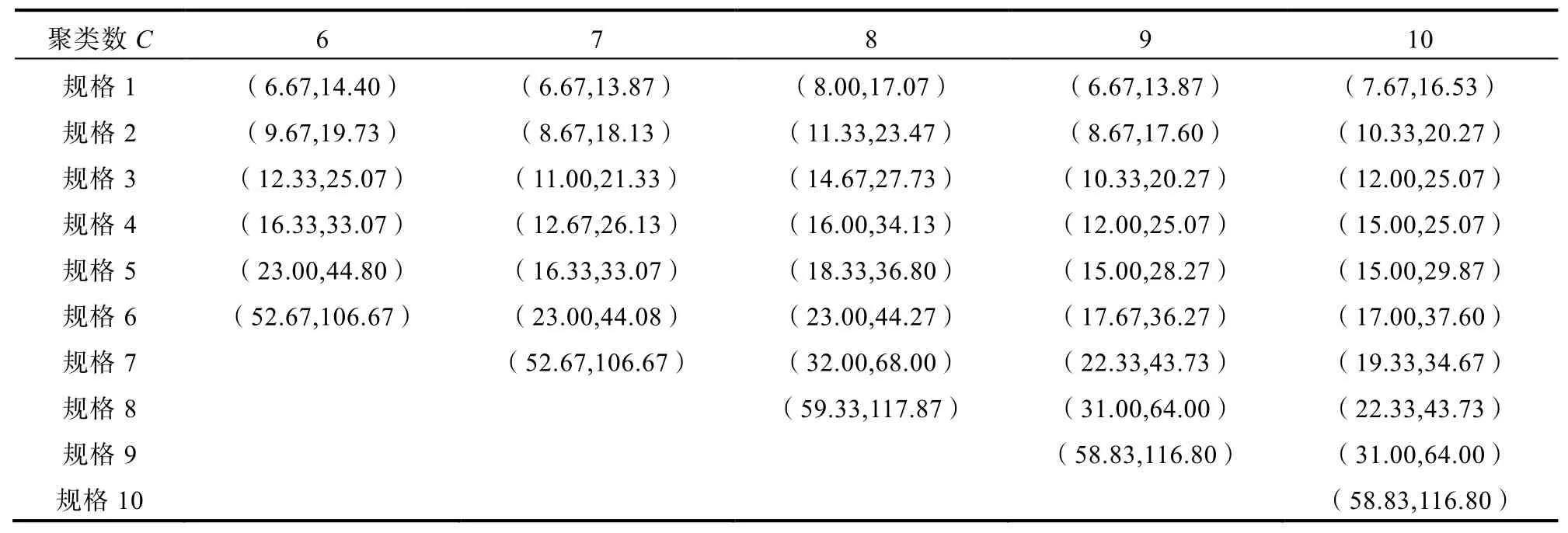
2.3 邊界框聚類驗(yàn)證
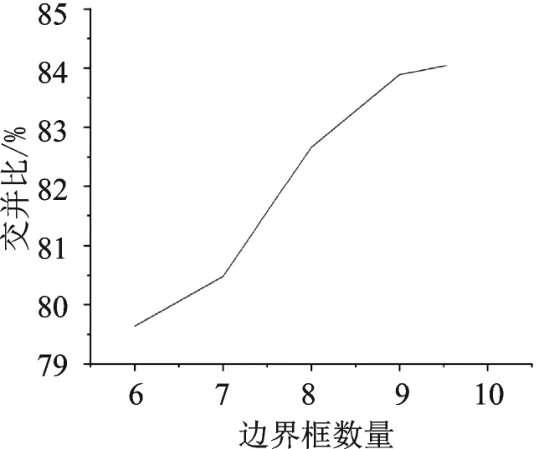
與以往Yolo算法不同,Yolov5采用自適應(yīng)錨框計(jì)算,將計(jì)算代碼寫入訓(xùn)練代碼當(dāng)中自適應(yīng)計(jì)算數(shù)據(jù)集中的最佳邊界框,在Yolov3算法訓(xùn)練時(shí),為了使兩種算法都具有較好的邊界框,使用Kmeans算法對數(shù)據(jù)集的真實(shí)邊界框?qū)捀哌M(jìn)行聚類,取聚類值分別為 6、7、8、9、10,邊界框聚類的結(jié)果如表1所示,不同邊界框數(shù)量對交并比的影響結(jié)果如表2所示。
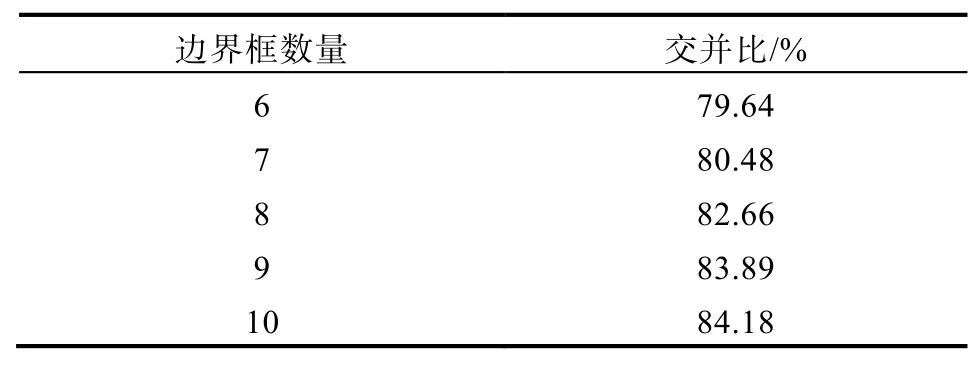
Yolov3中不同規(guī)格邊界框的IOU如圖4所示,雖然隨著邊界框的數(shù)量增加,不同的邊界框數(shù)量對應(yīng)的交并比增加,但是當(dāng)邊界框數(shù)量達(dá)到9個(gè)時(shí),交并比增加的速度開始減慢。由于邊界框的增加會(huì)影響算力,導(dǎo)致算法運(yùn)行時(shí)間增長。故選取邊界框數(shù)量為9。
2.4 測試結(jié)果分析
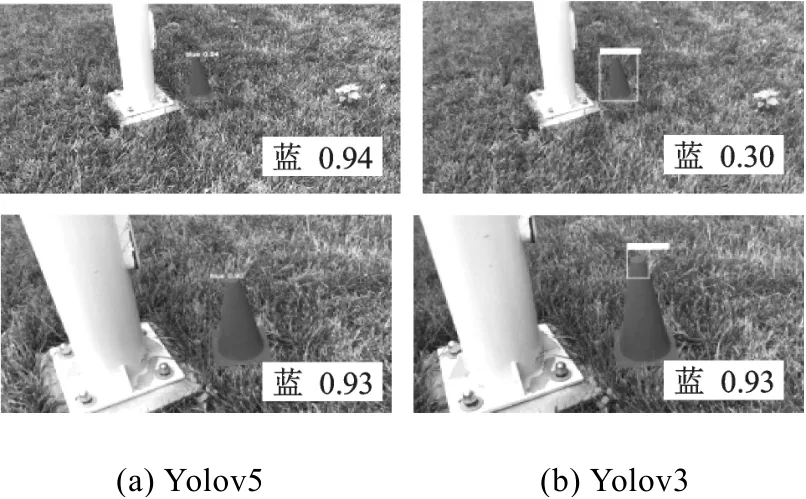
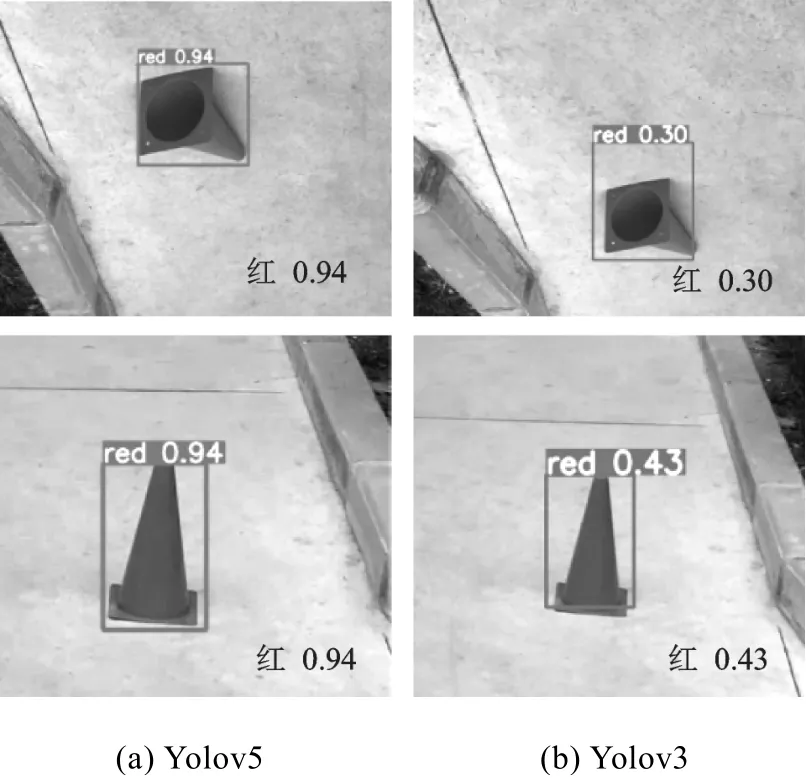
在不同光強(qiáng)、不同錐標(biāo)尺寸、不同錐標(biāo)視角下、遮擋前后和多顏色錐標(biāo)識別情況下對訓(xùn)練好的三個(gè)模型進(jìn)行測試。實(shí)驗(yàn)結(jié)果如圖5—圖8所示,圖中的數(shù)值為置信度。
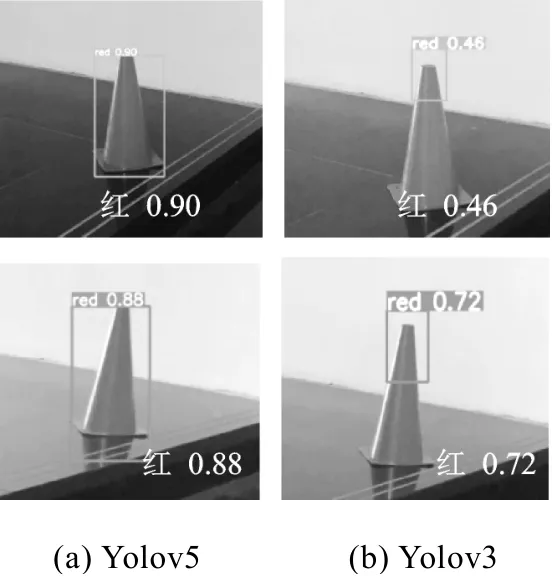
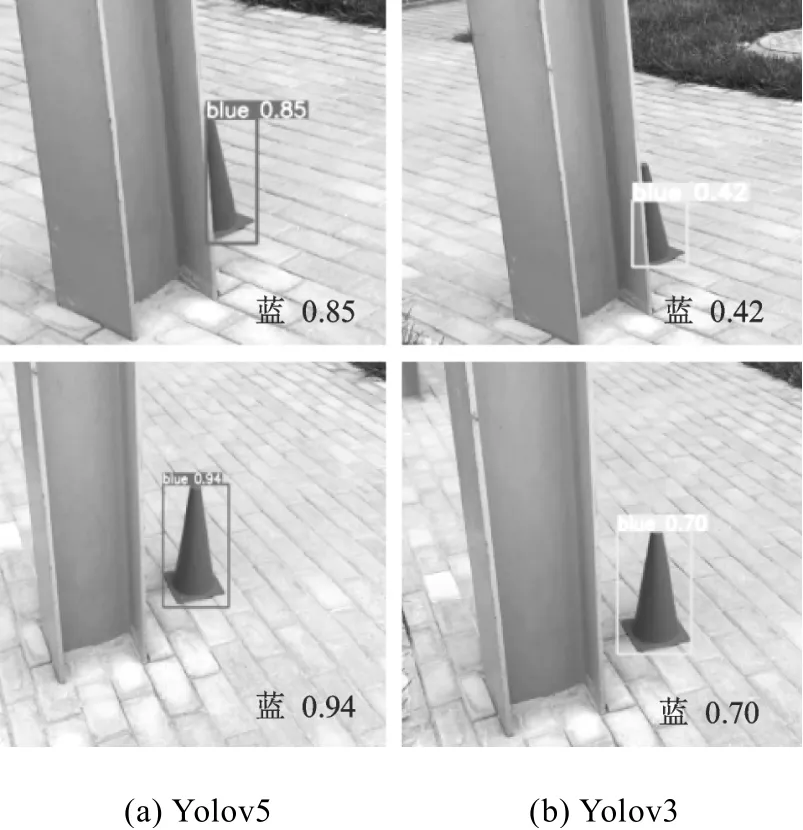
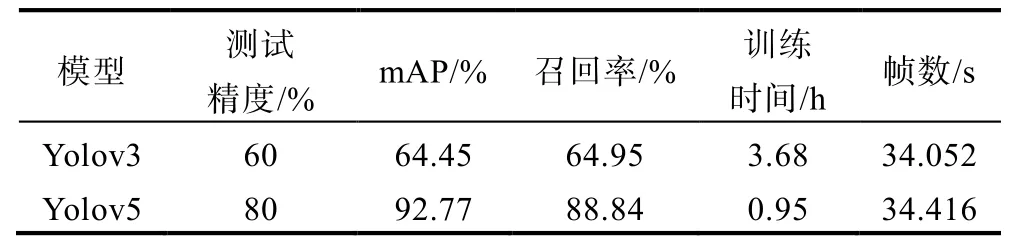
兩種網(wǎng)絡(luò)的檢測性能如表3所示,從檢測結(jié)果可以看出,在不同條件下,Yolov3、Yolov5都能檢測到交通錐標(biāo),但Yolov3的anchor框有一定概率出現(xiàn)回歸不準(zhǔn)確的情況。在少量樣本的情況下,Yolov5的置信度整體明顯高于Yolov3。
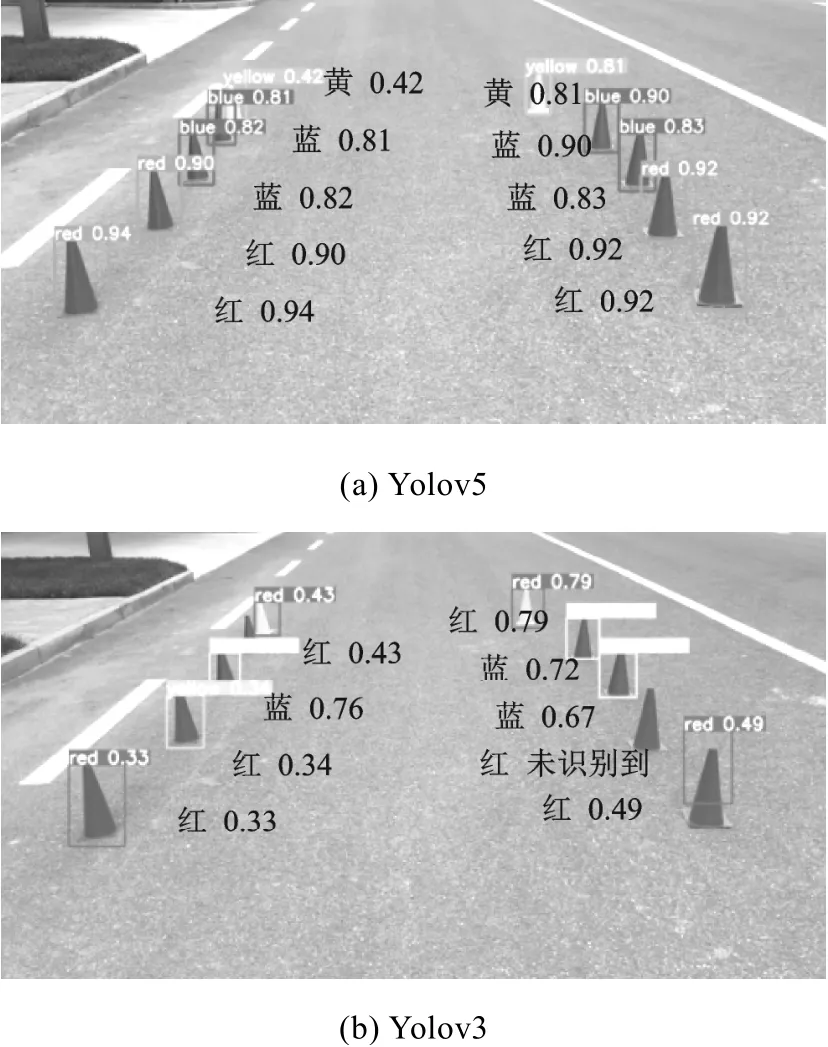
在遮擋情況下,檢測目標(biāo)的置信度均有所下降,多錐標(biāo)檢測效果對比如圖9所示,兩種模型都能對多錐標(biāo)的情況進(jìn)行檢測,但是由于論文數(shù)據(jù)僅為 1 000個(gè),Yolov3 中用于檢測交通錐標(biāo)顏色的特征層含有的語義信息不夠豐富,較低的語義信息會(huì)導(dǎo)致一定的分類錯(cuò)誤或較低置信度,給顏色識別帶來誤檢和漏檢,而 Yolov5 在少量樣本情況下仍能達(dá)到 0.83,且效果優(yōu)異,置信度總體優(yōu)于 Yolov3。
3 結(jié)論
為了實(shí)現(xiàn)交通錐標(biāo)的顏色識別處理,首先介紹了Yolov5基礎(chǔ)網(wǎng)絡(luò)結(jié)構(gòu),并對其輸出端進(jìn)行改進(jìn)。其次,制作了1 000張紅、黃、藍(lán)三種顏色的交通錐標(biāo)數(shù)據(jù)集,調(diào)整網(wǎng)絡(luò)參數(shù)并基于論文數(shù)據(jù)集進(jìn)行訓(xùn)練,得到錐標(biāo)顏色檢測模型。最后,進(jìn)行實(shí)車實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果表明,Yolov5交通錐標(biāo)顏色分類檢測模型相比Yolov3模型和原Yolov5模型,模型體量適中、速度更快且檢測精度更高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
