STATCOM對電力系統的穩定性影響仿真分析
2022-10-07 13:49:58張勝安曹天成
黑龍江科學 2022年18期
關鍵詞:系統
張勝安,曹天成
(常州博瑞電力自動化設備有限公司,江蘇 常州 213000)
當前的配電網建設有待加強,總體上電能質量還達不到電網要求,常常由于電氣化鐵路、鋼鐵冶煉等非線性負荷的增長及風電光伏等新能源發電的接入導致出現一系列沖擊、擾動甚至導致電網故障停運現象。電網系統主要存在以下問題:輸配電網負載不均勻,最大靜態穩定傳輸功率不足,長距離輸電線路過電壓,電網系統較弱,不夠穩定,非線性負荷引起的電壓畸變嚴重等。無功補償能有效解決這些問題。
無功補償設備能提供系統功率因數,減少功率損耗,穩定電壓,提高供電質量。從補償方式上看,常用的有三種,分別是集中補償、就地補償和分組補償[1]。集中補償通常適用于控制線路總配電處的功率因數,就地補償則是針對具體需要無功的線路或設備進行補償,分組補償則適用于用戶負荷較為分散情況,目前以就地補償方式較為普遍。
無功補償設備的發展經歷了4個時期,即同步調相機、電容電抗器組、靜止同步補償器及靜止無功發生器。同步調相機發展最早,主要應用于要求較高的場合,但操作復雜,造價昂貴,目前應用較少。電容電抗器組采用整組投切方式,造價低且簡單,但響應速度慢且容量不能平滑調節,一般用于補償性能要求不高或和其他無功補償設備相互配合的情況。靜止同步補償器則利用大功率電力電子器件進行控制,在響應速度和補償性能上有了很大改進,目前應用最多。靜止無功發生器則是在靜止同步補償器的基礎上更為小巧靈活,小容量情況下應用較多。
對于不同型式的無功補償設備在電力系統的補償性能研究已有不少學者作出了探究。文獻[2]針對串聯無功補償電容在低壓配電網中的應用進行了仿真計算分析,表明了在配電網低壓線路上加入串聯補償電容可以提升用戶端電壓,提升線路的功率因數,降低線損。文獻[3]基于地鐵項目實際情況,針對TCR和MCR兩種無功補償方式的補償效果進行了對比分析闡述。文獻[4]則根據某35kV煤礦的供電系統比較了僅采用FC支路進行無功補償和采用靜止無功發生器兩種情況下系統電能質量指標變化,突出了靜止無功發生器動態跟蹤補償的優勢。文獻[5]研究了靜態無功補償對風機輸電系統次同步振蕩特性的作用。本研究以STATCOM為例進行原理分析,以25kV配電網線路為例進行仿真分析,探究了STATCOM對電力系統的影響。
1 無功補償原理
1.1 STATCOM系統架構
STATCOM系統主要包含4個部分,即啟動回路間隔、連接電抗間隔、功率閥組間隔、控制保護系統間隔,具體模型如圖1。
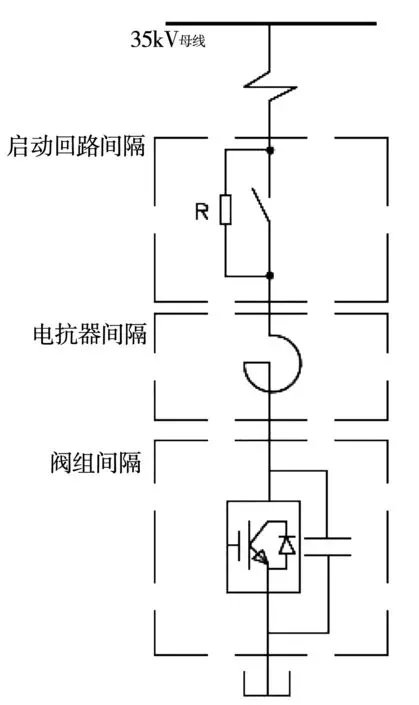
圖1 STATCOM系統主接線模型Fig.1 STATOM system main wiring model
啟動回路。啟動回路主要由啟動電阻和旁路開關組成。啟動回路用于STATCOM功率模塊的直流電容充電,當STATCOM未投入運行時,功率模塊中的電容電壓為0V,當支路開關合上時,如果直接合上旁路開關,會給STATCOM系統造成較大的沖擊,因此在剛投入運行后的短時間內,先經過啟動電阻限流,給功率模塊充電,當功率模塊上的電容電壓到達預定值時,旁路開關合上,功率模組解鎖正式運行。
連接電抗間隔。連接電抗間隔主要起到能量緩沖、降低輸出電流紋波的作用。一般有兩種型式,即電抗器和變壓器。當STATCOM的容量要求較高時采用電抗器連接,當STATCOM的容量要求較低時采用變壓器連接,不僅可以利用變壓器的漏感充當電抗器的作用,還能經過變壓降低STATCOM閥組的工作電壓,穩定性和經濟性更好。
功率閥組間隔。功率閥組是STATCOM系統的核心,主電路采用鏈式串聯結構,每相由若干個功率模塊單元組成。功率閥組和功率單元的拓撲結構如圖2。
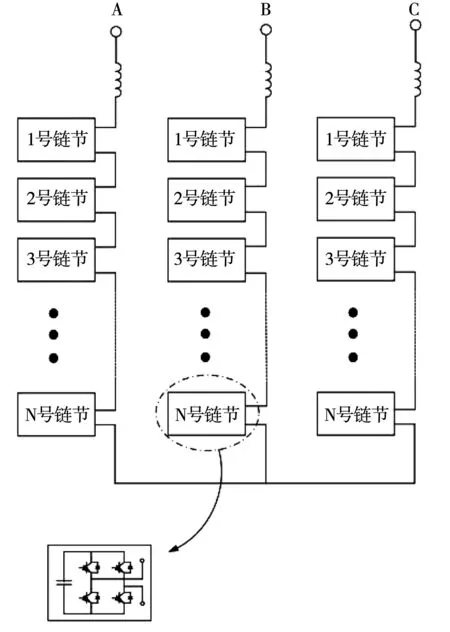
圖2 功率閥組和功率單元拓撲圖Fig.2 Power valve group and power unit topology
功率模塊單元的核心器件是IGBT(絕緣柵雙極型晶體管)和薄膜電容,目前較為先進的結構為H橋型,由4個IGBT組成,直流電容并聯在H橋兩端,H橋的中間為電壓的輸出端。外部閥組控制器采用PWM(脈寬調制技術)輸出調制波脈沖來觸發IGBT導通,通過改變調制脈沖來改變IGBT的導通角及導通時間,從而使功率模塊輸出的電壓電平不同。當每相多個功率模塊串聯時,通過多個模塊電平的疊加得到所需要的輸出電壓。功率模塊輸出電平及電壓疊加原理如圖3(a)(b)(c)所示。
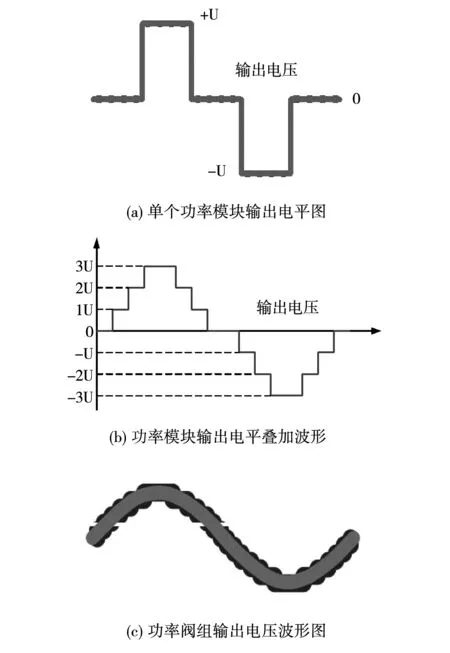
圖3 功率模塊輸出電平及電壓疊加原理Fig.3 Superposition principle of power module output level and voltage
通過直接改變每個功率模塊的輸出電壓可以間接改變STATCOM系統的輸出電壓,并且通常電網系統配置的STATCOM系統都會有足夠的冗余,因此可以在感性和容性之間自動切換,從而達到實時跟蹤電網系統狀態并快速補償、維持系統電壓和穩定的作用。
1.2 無功補償原理
以單相系統為例,當忽略STATCOM系統本身產生的諧波時,補償回路可以簡單等效為如圖4所示的電路。其中,Us為電網側的電壓,U1為STATCOM等效的輸出電壓,X為線路連接電抗,R為等效損耗電阻。規定從電網側流向STATCOM為電流I的正方向,當線路設備參數確認后,可通過調整Us和U1兩者的幅值與相角就可以調整連接電抗器兩端的電壓UL,通過控制UL的大小和相位,便可以達到控制流經連接電抗器的電流I,進而控制無功功率輸出。通過調節電壓和相位來調節無功輸出的原理向量圖如圖5。
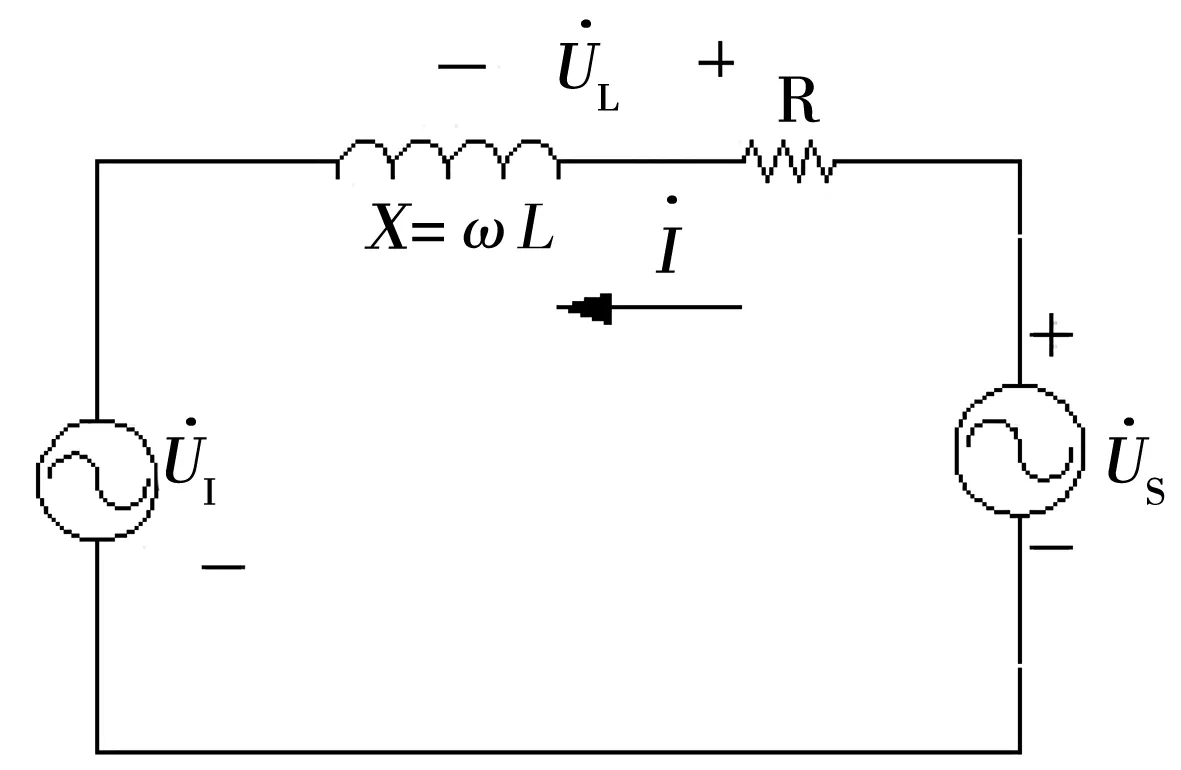
圖4 STATCOM單相等效電路Fig.4 STATOM single phase equivalent circuit
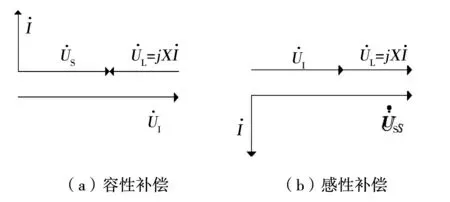
圖5 不考慮R時的補償向量圖Fig.5 Compensation vector graph without considering R
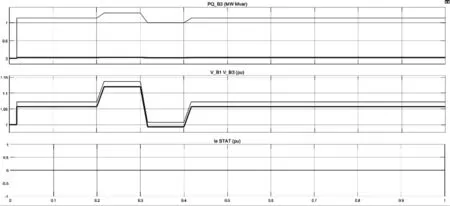
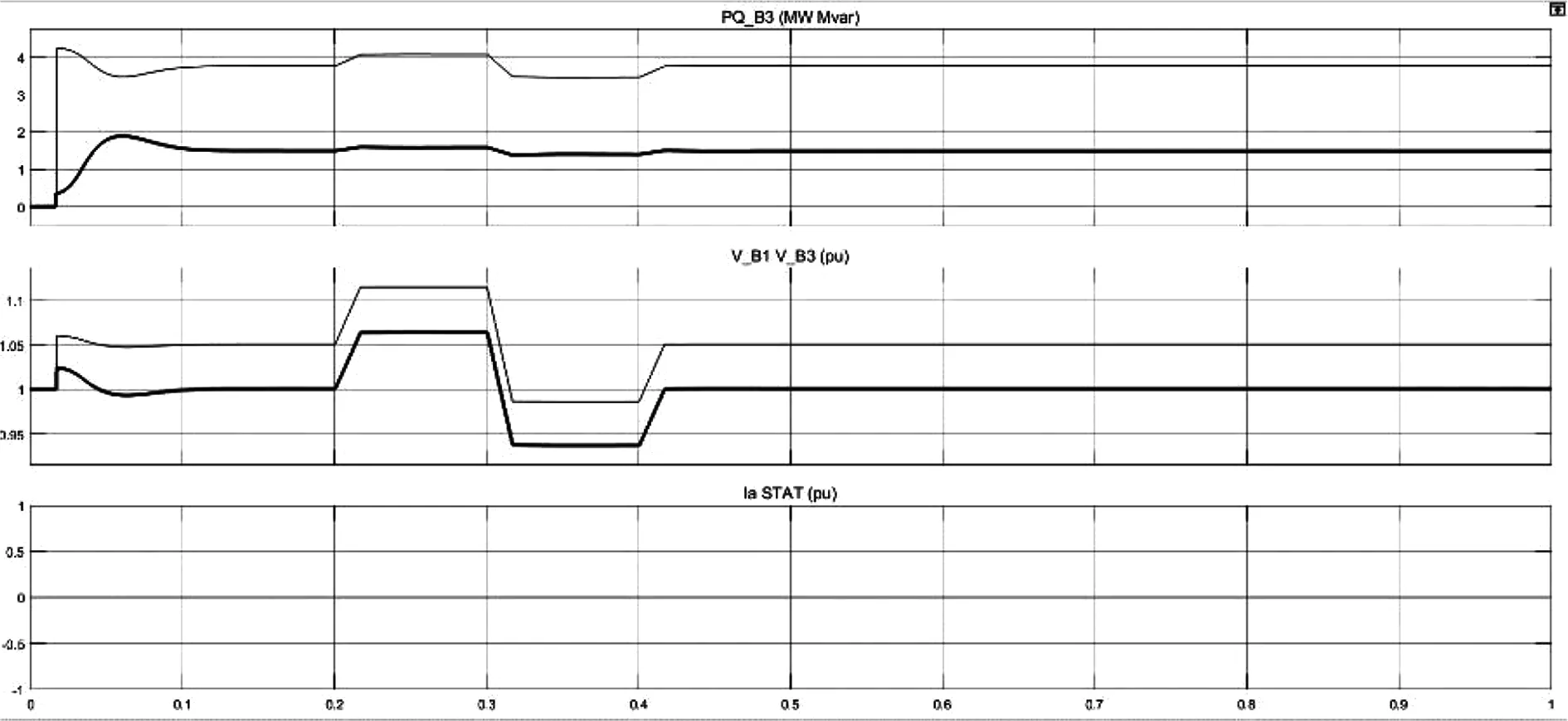
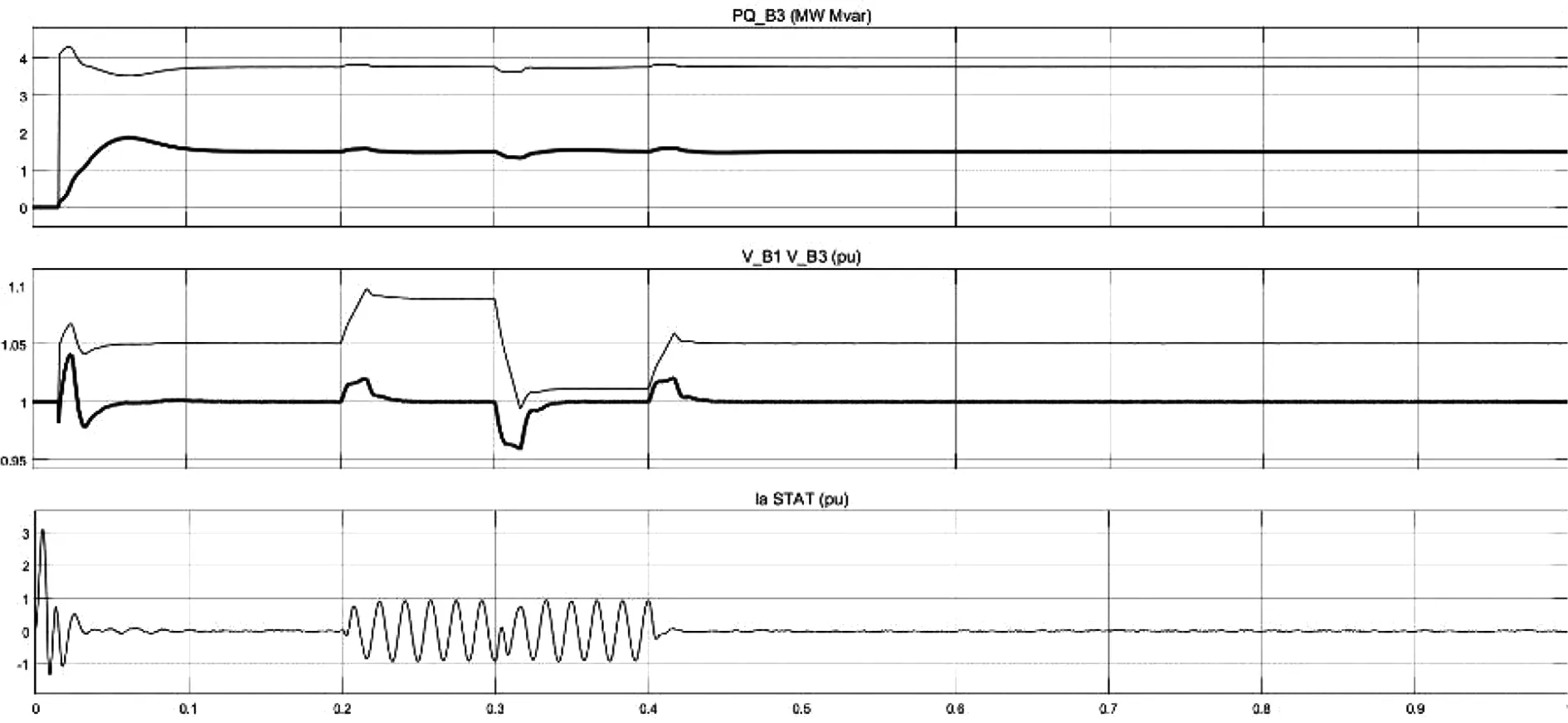
忽略線路電阻R,若U1和Us相位相同,當改變U1,使U1>Us,則產生超前電網電壓90°的電流I,如圖2(a)所示,此時STATCOM工作在容性的工況下,吸收容性的無功功率,發出感性的無功功率;當U1 當考慮STATCOM內部損耗時,補償向量圖如圖6所示。 圖6 考慮R時的補償向量圖Fig.6 Compensation vector graph under the consideration of R 由于有R的存在,U1和Us的相位并不完全相同。STATCOM直流側一般為電容或電感,由STATCOM產生的電流I與電網電壓Us之間會有一個小于90°的相位差,將I在Us方向上投影便可得到STATCOM損耗的有功電流,而I與Us方向垂直的分量則為STATCOM產生的無功電流,根據無功電流的超前或滯后來判斷是工作在感性還是容性工況下。 STATCOM能自動跟蹤并精確補償無功功率,本質上改變并控制的物理量為電流,通過采集監測點無功電流,從而調節STATCOM輸出所需的無功電流,其控制方法主要是直接電流控制和間接電流控制。控制系統直接控制STATCOM交流側的輸出電流,稱為電流直接控制,否則就是電流間接控制。 2.1.1 電流間接控制 電流間接控制是將STATCOM視為交流電壓源,通過調節STATCOM輸出電壓基波的幅值和相位達到間接控制交流側輸出電流的目的。電流間接控制有兩種方法,即單δ控制、δ與Θ配合控制。 單δ控制。δ指的是STATCOM輸出電壓和電網電壓間的相位差,STATCOM吸收的無功功率與2倍的δ的正弦值成正比。由數學極限可知,當δ變化很小時,STATCOM吸收的無功功率近似和δ成正比。通過控制δ的大小,可以控制STATCOM從電網中吸收的無功功率的大小和方向。 δ與Θ配合控制。Θ為將檢測到的三相電壓和電流經3/2變換后得到的電壓和電流矢量之間的夾角。δ與Θ配合控制方法需要同時控制δ和功率器件的導通關斷來調節STATCOM輸出電壓的幅值,具有直流側電容電壓穩定的優點,動態性能較好,但控制相對繁瑣,通常還需加上電流反饋控制,并引入直流電壓的反饋控制以便維持電容電壓的恒定。 2.1.2 電流直接控制 電流直接控制對STATCOM輸出側的無功電流直接進行控制。跟蹤型PWM(脈寬調制)技術是其控制的核心。跟蹤型PWM技術控制無功電流輸出是由PWM輸出的脈沖信號驅動變流器輸出相應的電流實現的,通常有以下幾種主要的PWM技術。 三角波比較法。三角波比較法的控制思想為利用給定電流參考信號和實際電流反饋信號的偏差作為確定功率開關的參數,經過PI調節器,再與某一設定頻率的三角波進行比較,并利用所得的比較結果控制功率器件的開關狀態,最后實現無功電流的跟隨。STATCOM容量較大時,三角波比較法應用較多,具有開關頻率固定、電路簡單易行等優勢,但輸出波形中高次諧波分量會導致其動態響應特性相對較差。 滯環比較法。滯環比較法與三角波比較法不同之處在于求得給定電流和反饋電流的偏差后將偏差送入環寬一定的滯環比較器中,進行滯回比較并產生相應的PWM觸發信號,控制功率器件的開關動作。例如,在給定信號和參考信號的偏差大于環寬上限時,觸發信號輸出低電平,功率開關處于關斷的狀態,減小輸出電流。反之,如果偏差小于環寬下限時,觸發信號輸出高電平,功率開關處于開通狀態,增大輸出電流,使得STATCOM的輸出電流在環寬內有效跟蹤參考電流。滯環寬度決定了電流的跟蹤效果。滯環比較法在電流變化和容量較小的STATCOM中應用較為廣泛。 以25kV配電網電力系統為例,利用仿真工具進行建模,其仿真系統圖如圖7所示。 圖7 25 kV配電系統仿真圖Fig.7 Simulation diagram of 25 kV power distribution system 仿真系統圖從左到右主要由以下幾部分組成:帶阻抗的25kV三相電源、三相線路、并聯濾波支路、STATCOM、配電變壓器及負載(包括可變負載和1MW固定負載)。B1、B2、B3為母線節點,通過左下角的數據監測模塊和示波器來觀測各節點相應的電壓、電流或有功與無功變化情況。 本研究主要關注STATCOM對系統的性能影響,故仿真過程關注B1節點的電壓和B3節點的電壓、有功和無功,重點分析在相同條件下,增加STATCOM系統前后系統的相關電氣量變化情況如何,由于三相電壓變化情況基本相同,故電壓檢測均只針對其中一相。 圖8為系統無可變負載和STATCOM時的波形圖,PQ_B3為B3節點的有功和無功波形圖,V_B1和V_B3分別為B1節點和B3節點的電壓波形。 圖8 無可變負載和STATCOM時波形圖Fig.8 No variable load and STATCOM waveform 圖9在圖8的基礎上在系統末端帶上可變負載后的仿真波形圖,數據監測的節點同圖8。 圖9 有可變負載且無STATCOM時波形圖Fig.9 Variable load and no STATCOM waveform 圖10在圖9情況的基礎上在B3節點前增加一套3Mvar的STATCOM系統后的仿真波形圖。 圖10 有可變負載和STATCOM時波形圖Fig.10 Variable load and STATCOM waveform 由圖8~圖10比較可知,當系統運行帶電后,在0.2~0.4 s的時間內,系統的功率和電壓均有不同程度的振蕩,當系統無STATCOM時,如圖8和圖9,節點B3處的功率和節點B1及節點B3處的電壓的幅值振蕩范圍較大,而增加STATCOM系統后,如圖10,STATCOM在振蕩時輸出無功電流,使得相同監測節點處的功率和電壓的振蕩幅度明顯變小。由此可見,STATCOM可以有效抑制電力系統的功率和電壓的振蕩,增加電力系統的穩定性。 介紹了STATCOM的發展背景及結構組成,分析了其補償原理和控制策略。利用仿真工具,搭建25 kV配電網系統仿真模型,通過波形分析,對比電力系統增加STATCOM設備前后系統功率和電壓振蕩情況來驗證STATCOM對電力系統穩定性的影響。仿真結果表明,STATCOM可以有效抑制電力系統振蕩,增強電力系統的穩定性。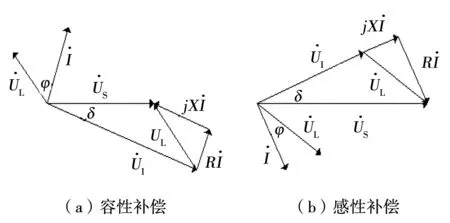
2 系統建模與仿真分析
2.1 STATCOM控制方法
2.2 STATCOM仿真
3 結論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
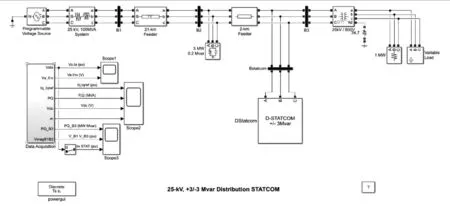
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32