四足機器人在綜合管廊電力艙巡檢中的應用
2022-10-09 09:32:46劉海峰池威威李志雷賈志輝張繼超
河北電力技術 2022年4期
關鍵詞:檢測
劉海峰池威威李志雷賈志輝張繼超
(國網河北省電力有限公司雄安新區供電公司,河北 雄安新區 071000)
隨著我國經濟的快速發展,城市地下綜合管廊得到越來越多的推廣應用。地下綜合管廊可以將城市中各種管線,如電力、通信、燃氣、供熱、給排水等進行統一規劃、統一設計、統一建設和管理,從而優化配置和合理利用地下空間。以雄安新區為例,預計到2035年入廊220 kV 電纜將達到190 km,入廊110 kV 電纜將達到731 km。面對地下電力設備設施的飛速增長,目前以人工巡檢為主的運維模式已很難適應新的形勢。為解決上述問題,國內一些大城市已經開始探索綜合管廊電力艙機器人巡檢技術。
1 綜合管廊電力巡檢存在的問題
綜合管廊作為保障城市運行的重要基礎設施和“生命線”,一般距離較長,且地形復雜,人工巡檢強度高,存在一定作業風險[1]。同時,綜合管廊電力艙擔負著城市電力供應的重任,需要通過巡檢及時掌握電纜運行狀態和環境變化。
1.1 巡檢設備
目前綜合管廊電力艙巡檢一般依托固定攝像頭、掛軌機器人、輪式巡檢機器人等。監控攝像頭安裝位置固定,視野有限,若對管廊環境全程覆蓋,需要大量部署,成本較高;掛軌機器人可在軌道上運動,對管廊內大部分區域可以進行有效巡檢,但其視野受限于軌道,無法360°全覆蓋;輪式巡檢機器人無視野限制,但輪式機器運動執行機構為車輪,要求地面平坦,并且通過坡度一般小于15°。通常管廊空間狹窄,地形環境復雜,存在坡道、障礙等,輪式機器人很難適應。
1.2 缺陷識別算法
缺陷識別算法可分為基于模式識別與基于學習兩大類。基于模式識別的方法主要有灰度共生矩陣、直方圖統計等。基于學習的方法分為監督和無監督兩類。有監督的深度學習缺陷檢測模型,如Fast RCNN、Yolo系列等,在缺陷類別明確的場景識別率較高,網絡實現相對簡單,但是需要了解缺陷詳細類別,且需要較大的缺陷樣本庫[2]。在管廊中,各位置的環境是固定并已知的,但缺陷是未知、位置不固定(如滲漏水)的,通常缺陷樣本的形狀、顏色都沒有穩定的統計規律,無法窮舉所有的缺陷種類(如電纜的破損),而且由于缺陷樣本難以收集、數量極少,直接使用監督學習會導致訓練集高度不平衡。
2 構建基于四足機器人的自主巡檢體系
2.1 巡檢設備
四足機器人憑借優越的越障能力和自適應能力,對地面條件的要求較輪式機器人大幅降低,在管廊環境中應用前景廣闊。四足機器人從典型四足動物的運動特點出發,采用運動捕捉等手段,對四足動物運動進行抽象和提煉。本文利用仿生設計思想,對機構、驅動和傳動等環節進行設計,重點分析典型四足動物的骨骼結構、主被動柔順運動機理以及柔性足底結構等生理特征。通過運動捕捉技術,采用紅外運動捕捉儀、陀螺儀、三維測力平臺、道格拉斯氣袋、氣體分析儀等設備,可采集典型腿足式動物在不同速度、路面和擾動情況下的關節及全身運動數據、地面作用力、壓力中心和能量消耗等大量數據、信息。采用基于虛擬力控制的方法規劃Trot步態行走,根據機器人期望的運動速度和身體姿態,結合地形適應控制和抗外力擾動控制,結合虛擬力控制生成機器人Trot步態,使其具有較強的路面適應性和抗擾動恢復能力,四足虛擬模型控制系統和Trot步態規劃框,見圖1、圖2。
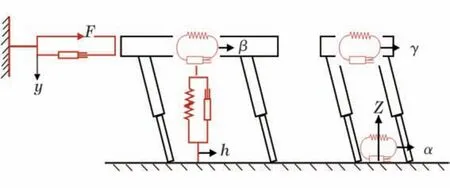
圖1 四足虛擬模型控制系統
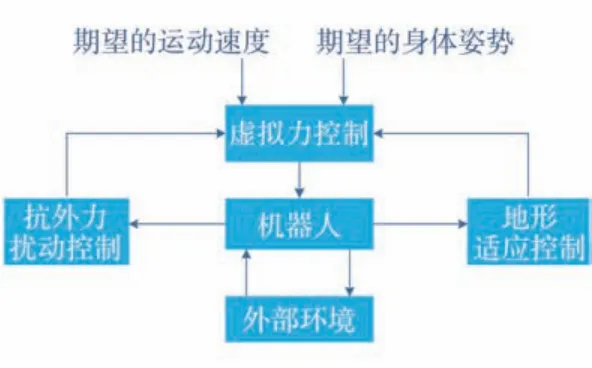
圖2 Trot步態規劃框示意
2.2 缺陷識別算法
相較于有監督學習缺陷檢測模型,無監督學習僅需要正樣本,如基于圖像修復的方法、基于深度自編碼器的方法、基于生成對抗網絡的方法。傳統無監督學習通常依賴生成模型,精確重建正常區域,無法直接異常定位,需要進行復雜的后處理步驟,增加了應用難度,限制了無監督方法的推廣。
應用基于正樣本的缺陷檢測算法DRAEM,并在算法原有網絡基礎上優化重構損失函數GMSD-DRAEM。以端到端的方式對生成的非分布模式進行鑒別訓練,不需要真實地表示目標域缺陷。該網絡由一個重構子網絡和一個判別子網絡組成,重構子網絡通過訓練來學習無缺陷重構,判別子網絡則在原始圖像和重構圖像的聯合外觀上學習,從而生成高保真像素級別缺陷檢測圖。本文根據管廊缺陷特點優化重構了損失函數,在原模型基礎上提升了缺陷識別準確率,提升了算法的適用性[3]。
如圖3所示,第1個缺陷區域(地面滲漏水)由重構子網絡隱式檢測和重構,然后將重構子網絡的輸出和輸入圖像連接起來并送到判別子網絡,使用焦點損失訓練分割網絡定位缺陷區域并生成缺陷圖,最后從缺陷分數圖中獲取圖像級缺陷分數。
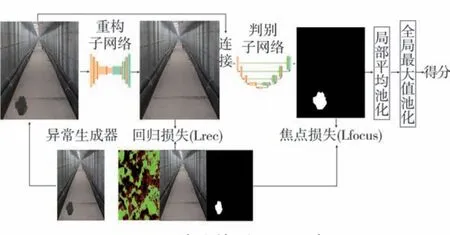
圖3 缺陷檢測原理示意
2.2.1 重構子網絡
重構子網絡被表述為一種編碼-解碼器架構,將輸入待測缺陷區域的局部模式轉換為更接近正常樣本分布的模式。網絡經過訓練可以利用模擬器獲得從人為損壞樣本Ia中重構的原始圖像Ir。使用梯度幅相似偏差(Gradient Magnitude Similarity Deviation,GMSD)優化重構子網絡中的損失函數。Ir損失通常用于基于重構的缺陷檢測方法,但現實中相鄰像素之間并非獨立,因此,額外采用基于圖像相似度亮度、對比度和結構的結構相似性(Structural Similarity Index,SSIM)[4]損失,取值范圍為0 到1,越大表示越相似。SSIM(I,Ir)為原始圖像與重構圖像的結構相似性,定義為
式中:μI、μIr分別為I、Ir的平均值;δ、δIr分別為I、Ir的標準差;δIIr為I、Ir的協方差;c1、c2分 別為常數,避免分母為0帶來的系統誤差。因此重構子網絡的SSIM 損失定義為
式中:h和w分別為圖像I的高度和寬度;Np為I中的像素數;Ir為網絡輸出的重構圖像;SSIM(I,Ir)i,j為I、Ir塊以圖像坐標(i,j)為中心的SSIM 值。
由于管廊場景下圖像有著豐富的局部結構,不同的結構有不同的梯度幅值退化損失,因而增加基于梯度幅值的損失GMSD[5],定義為

式中:h、w、Np、Ir含義同式(2);GMSD(I,Ir)(i,j)為I、Ir以圖像坐標(i,j)為中心的GMSD值。
因此,重構子網絡整體損失為

式中:λ1、λ2為重構損失平衡超參數。
2.2.2 判別子網絡
以往基于重構的缺陷檢測方法,通常將原始圖像與其重構圖進行比較得到缺陷圖,但是人工很難定義缺陷檢測的相似性度量方法。因此本文使用一種判別子網絡自動學習適當的距離函數,然后輸出與輸入圖像尺寸一致的缺陷分數圖。其中判別子網絡使用類似U-Net的架構,并融入跳躍連接操作,提升了網絡多尺度捕獲圖像空間細節和生成高質量的缺陷區域掩碼的能力。同時使用焦點損失函數,以提高對困難示例進行準確分割的魯棒性。
將重構子網絡輸出Ir和原始輸入待測缺陷區域圖像I的通道連接,作為判別子網絡的輸入Ic。由于重構子網絡對正常樣本具有恢復特性,因此當輸入圖像存在缺陷時I和Ir的聯合外觀差異較大,這一點為缺陷區域分割提供了必要的信息。
焦點損失函數定義為

式中:Ma、M分別為ground truth和異常分割掩碼。綜合上述重構和判別子網絡,基于正樣本學習的缺陷檢測模型用于訓練的總損失函數為

式中:Ma、M、I、Ir含義 同上。
2.2.3 缺陷定位和檢測
判別子網絡的輸出為像素級缺陷區域檢測掩碼Mo,可直接判別缺陷位置。同時通過均值濾波器卷積層對Mo進行平滑處理,聚合局部缺陷響應信息,用平滑缺陷分數圖的最大值η作為圖像級別缺陷概率,可判別圖像中是否存在缺陷,η定義為,

式中:fsf×sf為sf×sf的均值濾波器;*為卷積算子。
3 自主巡檢方法測試與應用
3.1 圖像采集
在綜合管廊場景下,四足機器人采用定點巡檢方式進行巡檢。首先四足機器人按照計劃任務定點拍攝待檢測的點位圖片,作為模板圖片;然后四足機器人開始巡檢,同樣按照計劃任務巡檢到待檢測的巡檢點位,采用拍攝模板圖片時相同的距離、角度、變倍系數拍攝待測圖片,待測圖片與模板圖片具有一致的分辨率和相似的視野。
由于四足機器人定點拍攝過程中,導航與云臺存在定位偏差,待測圖像與模板圖像存在一定的偏移,為了消除偏移對后續缺陷檢測造成的影響,將待測圖像與模板圖像進行配準,使得待測圖像與模板圖像對應位置的像素點進一步對齊,配準成功之后,提取待測圖像與模板圖像中缺陷待測區域所對應區域,作為待測圖像的缺陷待檢區域。
3.2 模擬缺陷生成
在綜合管廊場景下,基于正樣本學習的缺陷檢測模型,不需要模擬生成目標域中真實的缺陷外觀,而是生成剛剛超出正常分布的外觀,然后學習適當的距離函數以通過偏離正常分布來識別缺陷[6]。模擬缺陷生成過程見圖4。缺陷模擬器遵循下述規則。
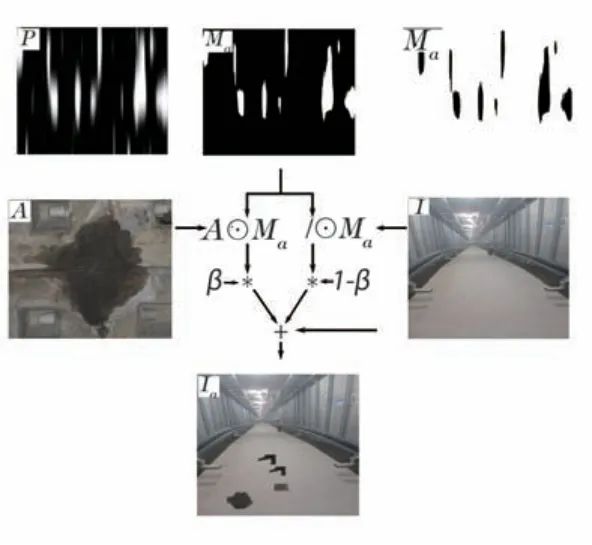
圖4 模擬缺陷生成過程
使用柏林噪聲生成器生成噪聲圖P,可捕獲各種形態缺陷,并通過隨機均勻采樣的閾值將噪聲二值化為缺陷圖Ma。然后從與輸入圖像分布無關的缺陷源圖像數據集中采樣,得到缺陷紋理源圖像A。采用類似Rand Augment隨機增強采樣方法,從集合(后處理、銳度、均衡、亮度變化、顏色變化、自動對比度)中隨機選擇3種操作對圖像紋理A進行增強。增強的紋理圖像A與缺陷圖Ma進行圖像運算,并與I混合用來生成剛剛超出正常分布的缺陷圖,從而有助于收緊訓練網絡中的決策邊界[7]。增強后用于訓練的圖像Ia定義為

式中:為Ma圖像取反;☉為元素乘法運算;β為不透明度參數,從[0.1,1.0]區間中均勻采樣。通過隨機混合和增強,一個單一的紋理可生成不同的缺陷圖像。
3.3 訓練集
收集四足機器人巡檢過程中不同時間段云臺相機拍攝的管廊環境的4個點位圖像進行訓練,為了提高模型魯棒性,減少過擬合程度,將圖像經過平移、旋轉、縮放、光照增強等變換[8]。該數據集命名為管廊環境正樣本訓練集,包含原始1 000張圖像,其中每個類別250張圖像,增強8 000張,每個類別2 000張。使用copy-paste數據增強方法,利用VOC2012數據集和破損、漏水缺陷圖像,制作管廊環境缺陷測試數據集,命名為管廊缺陷測試數據集,包含1 000張正常圖像與3 000張缺陷圖像,缺陷圖像中包含300張管廊破損樣本和300張滲漏水樣本。測試中,GMSD-DRAEM 在管廊缺陷訓練集上訓練了100個epoch,學習率設置為10-4,并在40和60個epoch之后學習率變為原來的0.1倍。在-45°~45°內的圖像旋轉用作訓練期間無缺陷圖像的數據增強方法,以減輕由于較小的無缺陷訓練集而導致過度擬合。可描述紋理數據集用作缺陷模擬生成器缺陷源數據集。訓練損失函數曲線見圖5。
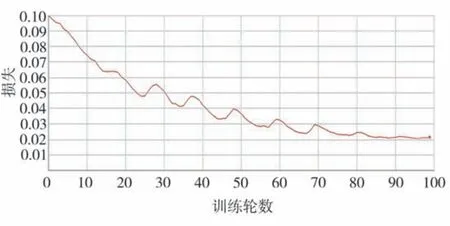
圖5 訓練損失函數曲線
從圖5可以看出,模型的損失曲線下降平滑,表明模型在缺陷訓練集上的有效性。
4 結論
構建基于四足機器人的綜合管廊電力艙巡檢系統,由機器人巡視替代人工巡視,減少管廊人工巡檢頻次,節省運維成本,規避運檢人員作業風險;通過搭載多種傳感器,實現缺陷自主識別,提高巡檢作業效率。通過采集綜合管廊環境、安防、電纜運行狀態等數據,接入后臺監控系統進行分析診斷和風險預警,實現“數據集成、業務協同、管理集中、資源共享”。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48