一種基于動(dòng)態(tài)交通子區(qū)相似度的控制方案推薦系統(tǒng)
2022-10-10 09:25:24何通能
計(jì)算機(jī)應(yīng)用與軟件 2022年9期
何通能 王 震 范 琦
(浙江工業(yè)大學(xué)信息工程學(xué)院 浙江 杭州 310023)
0 引 言
在智慧城市的建設(shè)過程中,緩解交通擁堵問題已經(jīng)成為一個(gè)巨大挑戰(zhàn)。雖然優(yōu)化交通路網(wǎng)建設(shè)和控制車輛數(shù)量是最為直接的方法[1],但是隨著物聯(lián)網(wǎng)和智能交通系統(tǒng)等技術(shù)的發(fā)展,優(yōu)化現(xiàn)有的交通控制方案(Urban Traffic Control),提高道路使用率是降低擁堵成本、減少空氣污染最快速且有效的方法[2-5]。
交叉口控制方案推薦是智能交通系統(tǒng)中的重要組成部分,目前已經(jīng)有很多應(yīng)用系統(tǒng)通過將交通路網(wǎng)劃分成多個(gè)交通控制子區(qū)的方式來提高信號(hào)控制網(wǎng)絡(luò)的運(yùn)行性能[6-7]。這些應(yīng)用多為根據(jù)實(shí)時(shí)交通模式調(diào)整配時(shí)參數(shù)(如信號(hào)周期時(shí)長、綠信比等)的自適應(yīng)控制系統(tǒng)[8],例如SCOOT、SCATS系統(tǒng)等[9-10]。
世界上已經(jīng)有許多城市部署了自適應(yīng)信號(hào)控制系統(tǒng)[11],但是在實(shí)際操作過程中仍需要專業(yè)配時(shí)人員根據(jù)多維數(shù)據(jù)提供的信息及專家經(jīng)驗(yàn)進(jìn)行人工調(diào)參。專業(yè)配時(shí)人員致力于提高城市交通路網(wǎng)的運(yùn)行效率,保障城市交通控制的安全有序,以及滿足各種復(fù)雜的交通需求[12]。當(dāng)交通路網(wǎng)呈區(qū)域性擁堵時(shí),例如交通高峰時(shí)期,專業(yè)配時(shí)人員的工作量是相當(dāng)大的。因此,能夠針對(duì)大面積交通擁堵問題的適用于專業(yè)配時(shí)人員的方案推薦系統(tǒng)已經(jīng)成為迫切需求。
目前已有不少動(dòng)態(tài)劃分交通控制子區(qū)和控制方案推薦的方法,但在實(shí)際應(yīng)用過程中,難以滿足復(fù)雜的業(yè)務(wù)需求[13-15]。因此,本文提出一種在短時(shí)交通狀態(tài)預(yù)測下,結(jié)合專家以往調(diào)控經(jīng)驗(yàn),可實(shí)時(shí)劃分控制子區(qū)和下發(fā)控制方案的可視化方案推薦系統(tǒng)。
1 相關(guān)研究
為了能夠充分利用可靠的流量監(jiān)測設(shè)備提供的實(shí)時(shí)數(shù)據(jù)[1],實(shí)現(xiàn)多個(gè)信號(hào)燈聯(lián)網(wǎng)協(xié)調(diào)控制,在20世紀(jì)70年代,自適應(yīng)信號(hào)控制系統(tǒng)已經(jīng)開始研發(fā)[2]。隨著交通控制理論的完善和檢測器技術(shù)的提升,逐漸提出了性能更為優(yōu)越的自適應(yīng)信號(hào)控制系統(tǒng)。Li等[3]根據(jù)安裝在交叉路口處的攝像頭提供的圖像得出車輛排隊(duì)長度,并利用車輛隊(duì)列信息提出了一種自適應(yīng)交通信號(hào)控制方法。Zaatouri等[4]在基于Agent運(yùn)輸模擬MATSim中,實(shí)現(xiàn)了對(duì)單交叉口自適應(yīng)控制的算法,仿真實(shí)驗(yàn)表明該算法總體上優(yōu)于固定時(shí)間控制。此外,Srinivasan等[5]擴(kuò)展了傳統(tǒng)的強(qiáng)化學(xué)習(xí)模式,基于FRL的自適應(yīng)控制器考慮了交通實(shí)際狀況,相較于FAC方案,模擬結(jié)果顯示該方法能夠有效防止交通網(wǎng)絡(luò)過度擁堵。
能夠根據(jù)實(shí)時(shí)交通數(shù)據(jù),將具有類似交通狀態(tài)的交叉口劃分為同一片交通控制區(qū)域進(jìn)行協(xié)調(diào)控制,是目前交通信號(hào)控制常用的方案。Lin等[6]使用規(guī)劃域定義語言的方法,增加資源約束和時(shí)間約束創(chuàng)建區(qū)域交通信號(hào)控制模型。Ma等[7]考慮了交通網(wǎng)絡(luò)的自由尺度特征,將節(jié)點(diǎn)優(yōu)度和高峰時(shí)段交通流作為信號(hào)子控制區(qū)的劃分指標(biāo)。Zhang等[8]等使用網(wǎng)絡(luò)分區(qū)的概念,提出了一種用于調(diào)節(jié)來自鄰近區(qū)域的輸入交通流量的區(qū)域需求管理方法。
Bretherton等[9]采用了一種全網(wǎng)協(xié)調(diào)延遲時(shí)間估計(jì)模型估計(jì)每個(gè)鏈路的車輛總延遲時(shí)間,結(jié)合交通流量數(shù)據(jù)自適應(yīng)控制交通信號(hào)。Theresa等[10]根據(jù)鏈路之間的相關(guān)度使用光譜二分法劃分城市網(wǎng)絡(luò)。盡管大量文獻(xiàn)中都提出了應(yīng)對(duì)區(qū)域交通控制效果較為不錯(cuò)的自適應(yīng)系統(tǒng),但在實(shí)際部署的自適應(yīng)系統(tǒng)中,仍然難以實(shí)時(shí)動(dòng)態(tài)劃分交通子區(qū)。
總之,提出的交通信號(hào)控制系統(tǒng)和子區(qū)域劃分方法大多數(shù)沒有能夠利用歷史劃分的子區(qū)數(shù)據(jù)。Pascale等[11]依賴于當(dāng)前的交通數(shù)據(jù)和歷史數(shù)據(jù)的“窗口”,對(duì)每個(gè)交叉口控制器采取方案優(yōu)化,在仿真實(shí)驗(yàn)中取得了不錯(cuò)的效果。Wen等[12]對(duì)歷史數(shù)據(jù)進(jìn)行深度強(qiáng)化學(xué)習(xí),使用DNQ算法調(diào)整信號(hào)相位實(shí)現(xiàn)信號(hào)定時(shí)的自適應(yīng)調(diào)整,能夠顯著減少交叉口延遲。綜上,本文基于子區(qū)動(dòng)態(tài)數(shù)據(jù)聚類算法及協(xié)同推薦算法的技術(shù)背景下,首先據(jù)動(dòng)態(tài)子區(qū)的路口間的空間關(guān)系完成第一層的聚類,再使用K-means++算法對(duì)具有相同空間數(shù)據(jù)并且不同流量數(shù)據(jù)的交通子區(qū)模型進(jìn)行第二層聚類。在工程實(shí)踐中驗(yàn)證,對(duì)于大型道路網(wǎng)絡(luò)使用歷史動(dòng)態(tài)交通控制子區(qū)實(shí)時(shí)推薦區(qū)域交通控制方案的有效選擇。
2 系統(tǒng)設(shè)計(jì)
2.1 系統(tǒng)架構(gòu)
推薦系統(tǒng)依賴于現(xiàn)有的實(shí)際部署的交通控制系統(tǒng)所提供的數(shù)據(jù),避免重新部署提高成本。本文所設(shè)計(jì)的用于城市交通區(qū)域控制的方案推薦系統(tǒng)架構(gòu)如圖1所示。區(qū)域方案推薦系統(tǒng)由六個(gè)主要部分組成:歷史動(dòng)態(tài)子區(qū)數(shù)據(jù)庫、短時(shí)交通流預(yù)測模型、動(dòng)態(tài)交通子區(qū)劃分模型、動(dòng)態(tài)子區(qū)相似度計(jì)算模型、方案生成器和方案下發(fā)模塊。
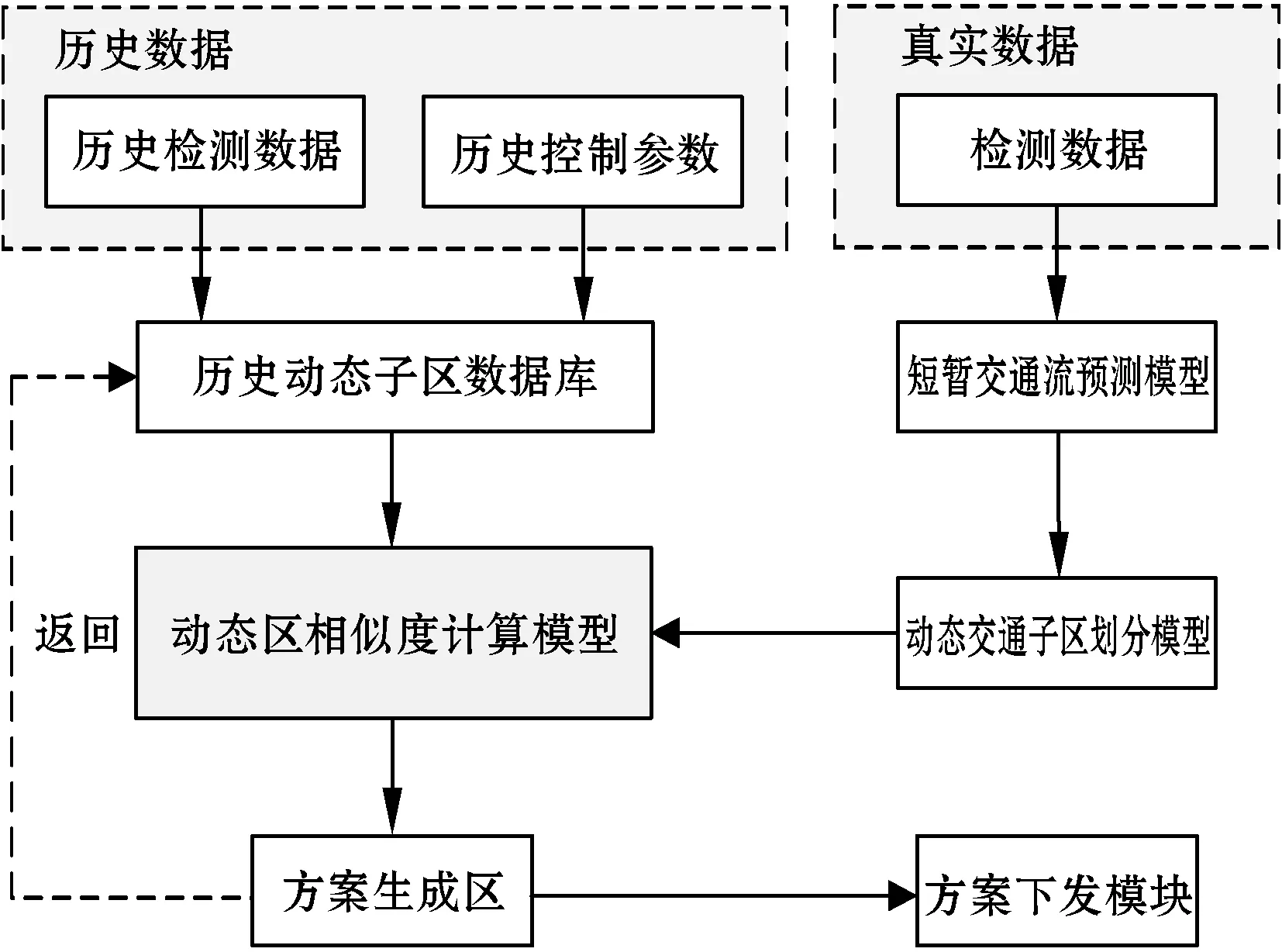
圖1 城市交通區(qū)域控制方案推薦系統(tǒng)架構(gòu)
系統(tǒng)運(yùn)行之前,會(huì)根據(jù)歷史數(shù)據(jù)(歷史檢測器數(shù)據(jù)和歷史控制參數(shù)),在時(shí)間維度上將交通路網(wǎng)中的交叉口進(jìn)行動(dòng)態(tài)劃分。劃分后的交通子區(qū)數(shù)據(jù)存入歷史動(dòng)態(tài)子區(qū)數(shù)據(jù)庫中,動(dòng)態(tài)子區(qū)的數(shù)據(jù)量越大越有助于提高推薦方案的準(zhǔn)確性。系統(tǒng)運(yùn)行時(shí),通常根據(jù)路口實(shí)時(shí)檢測器數(shù)據(jù)在短時(shí)交通流量預(yù)測模塊中預(yù)測路網(wǎng)接下來的交通流量,然后由預(yù)測的交通流量數(shù)據(jù)在動(dòng)態(tài)交通子區(qū)劃分模塊重新劃分交通控制子區(qū)。在動(dòng)態(tài)子區(qū)相似度計(jì)算模塊中,系統(tǒng)將預(yù)測狀態(tài)下的交通控制子區(qū)與歷史動(dòng)態(tài)子區(qū)數(shù)據(jù)庫中的交通子區(qū)進(jìn)行相似度計(jì)算,并根據(jù)相似度進(jìn)行打分排序,將相似子區(qū)的控制方案顯示在方案生成器中。交通信號(hào)工程師可以根據(jù)專家經(jīng)驗(yàn)和實(shí)際交通需求修改或直接選擇最適用的方案,同時(shí)方案生成器將被選中的方案保存在歷史動(dòng)態(tài)子區(qū)數(shù)據(jù)庫中,以提高系統(tǒng)的查準(zhǔn)率。最后,系統(tǒng)通過可視化界面,可以直接將確定的方案下發(fā)到交通控制系統(tǒng)中。
分布式計(jì)算是處理海量時(shí)空數(shù)據(jù)最合適的方案,歷史動(dòng)態(tài)子區(qū)數(shù)據(jù)庫使用K-NN算法將數(shù)據(jù)分類存儲(chǔ),目的是便于動(dòng)態(tài)交通子區(qū)相似度計(jì)算模型的快速檢索。短時(shí)交通預(yù)測模型使用小波神經(jīng)網(wǎng)絡(luò)模型(WNN)[13]。獲取預(yù)測流量后,動(dòng)態(tài)交通子區(qū)劃分模型結(jié)合流量數(shù)據(jù)和路口之間的空間關(guān)系(如拓?fù)潢P(guān)系和距離關(guān)系)將交通路網(wǎng)動(dòng)態(tài)劃分。系統(tǒng)推薦的方案會(huì)直觀地展示子區(qū)中各個(gè)路口的控制參數(shù)。
2.2 動(dòng)態(tài)交通子區(qū)模型

σAB=min(σA,B,σB,A)
(1)
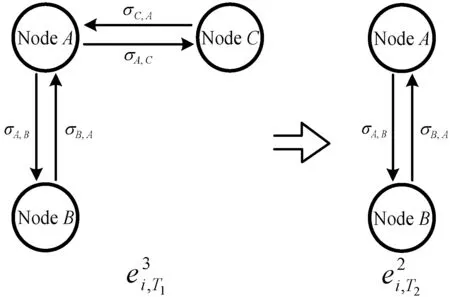
圖2 T1到T2時(shí)間內(nèi)的動(dòng)態(tài)子區(qū)演變
單向相關(guān)度計(jì)算公式為:
(2)

(3)

(4)
2.3 分布式協(xié)同過濾推薦
2.3.1分層聚類
K-means++是一種無監(jiān)督的聚類分析算法,通過計(jì)算聚類中心被選中的概率,在K-means算法的基礎(chǔ)上大幅提高了算法效率[16]。圖3是歷史動(dòng)態(tài)子區(qū)數(shù)據(jù)庫的初始樣本集處理模型,X為初始訓(xùn)練集。我們根據(jù)動(dòng)態(tài)子區(qū)的路口間的空間關(guān)系完成第一層的聚類。由于時(shí)間維度上的切分將導(dǎo)致數(shù)據(jù)指數(shù)倍增加,所以我們將使用K-means++算法對(duì)具有相同空間數(shù)據(jù)并且不同流量數(shù)據(jù)的交通子區(qū)模型進(jìn)行第二層聚類。
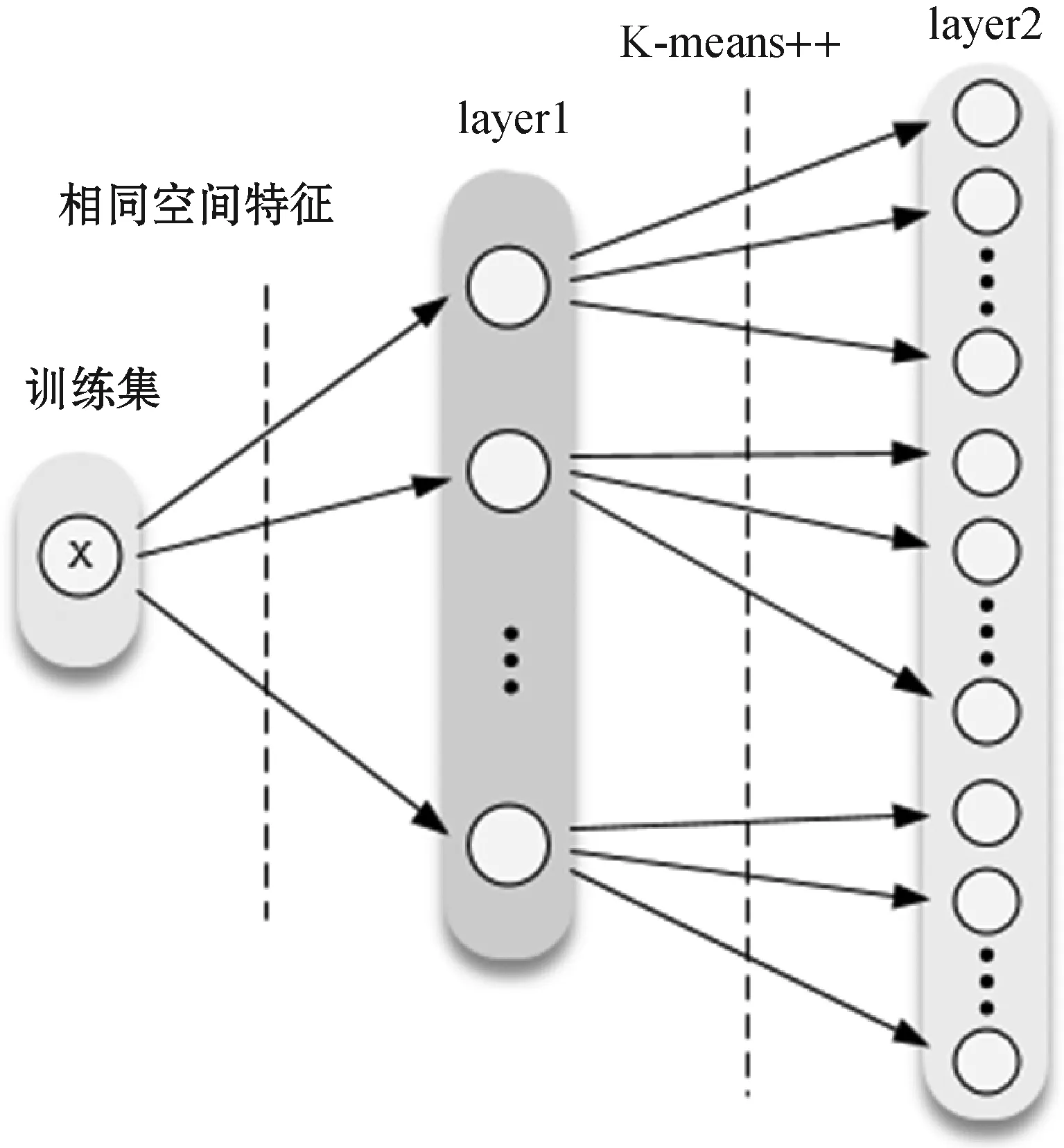
圖3 分層聚類模型
(5)
式中:h為具有相同空間形狀的動(dòng)態(tài)子區(qū)總數(shù)。概率最大的動(dòng)態(tài)子區(qū)流量數(shù)據(jù)作為下一個(gè)聚類中心,并以此迭代。最后,將各維度數(shù)據(jù)均相等并且控制方案完全一致的動(dòng)態(tài)子區(qū)做去重復(fù)處理。
2.3.2子區(qū)相似度計(jì)算
時(shí)空數(shù)據(jù)的相似度計(jì)算對(duì)于算法的性能要求極高,尤其是需要實(shí)時(shí)計(jì)算的方案推薦系統(tǒng)[17]。歐氏距離是推薦算法中最常用的多維數(shù)據(jù)相似度計(jì)算方法[18]。但是,在單個(gè)路口的信號(hào)配置過程中,各相位之間的橫向差異會(huì)影響綠燈時(shí)間的分配[19]。因此,本文不優(yōu)先選用歐氏距離,下面將會(huì)比較歐氏距離與本文采用的ACS模型的實(shí)驗(yàn)效果。
(6)
式中:η為Min-Max標(biāo)準(zhǔn)化參數(shù)(Min-Max normalization parameter),用于相似度的歸一化處理,將數(shù)據(jù)映射到(0-1)區(qū)間內(nèi),提升模型的收斂度和精度。η計(jì)算如下:
(7)
式中:ψmax、ψmin為子區(qū)流量的最大值和最小值。

(8)
式中:Sα表示點(diǎn)集與聚類中心的相似度。如果在聚類算法中使用同種相似度計(jì)算方法并在計(jì)算過程中記憶向量模長,有助于減少實(shí)時(shí)運(yùn)算量[20]。
3 案例分析
3.1 實(shí)驗(yàn)設(shè)置
為了方便系統(tǒng)推薦的方案可以直接控制交通信號(hào)燈,系統(tǒng)將依賴第六代Scats系統(tǒng)。第六代Scats系統(tǒng)可以根據(jù)檢測器數(shù)據(jù)自適應(yīng)信號(hào)控制方案,支持信號(hào)工程師在終端(Windows系統(tǒng))人為設(shè)置方案參數(shù)并控制對(duì)應(yīng)交叉口的信號(hào)燈。因此,本實(shí)驗(yàn)選擇在配備3.4 G Intel Core i7- 6700,16 GB memory 64位Windows 10操作系統(tǒng)的平臺(tái)上進(jìn)行,算法部分使用Python實(shí)現(xiàn)。
圖4展示了中國杭州市交通路網(wǎng)的地理數(shù)據(jù),包含2 328個(gè)交叉口,每兩個(gè)相鄰交叉口之間由路段連接。雙向通行路段包含兩條link,link表示具有方向的路段。我們選取2019年1月份的檢測器數(shù)據(jù)結(jié)合路網(wǎng)地理信息動(dòng)態(tài)劃分子區(qū)。將劃分得到的動(dòng)態(tài)子區(qū)作為訓(xùn)練集,將訓(xùn)練得到的分類數(shù)據(jù)存儲(chǔ)在歷史動(dòng)態(tài)子區(qū)數(shù)據(jù)庫,數(shù)據(jù)結(jié)構(gòu)如表1所示。

圖4 中國杭州路網(wǎng)數(shù)據(jù)
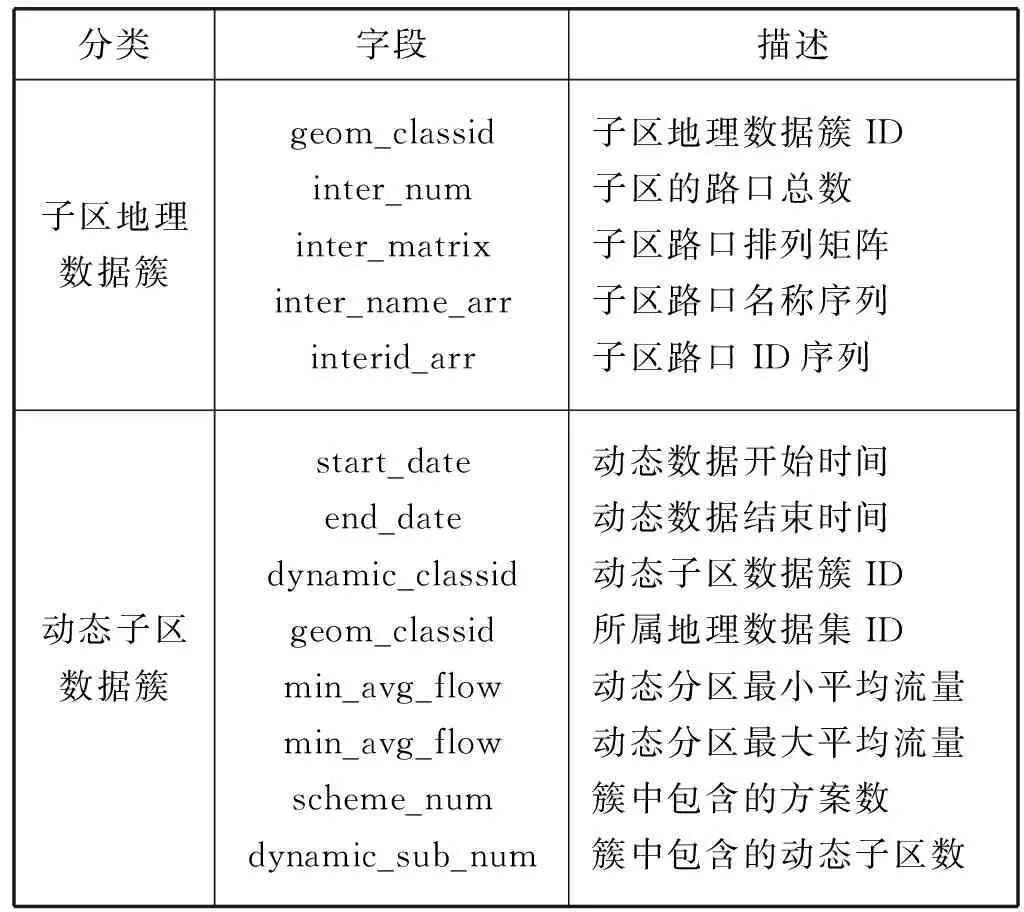
表1 數(shù)據(jù)結(jié)構(gòu)表
本文實(shí)驗(yàn)選擇數(shù)據(jù)集中具有高度復(fù)雜路況和多個(gè)交叉點(diǎn)的子區(qū)域作為例子來驗(yàn)證區(qū)域方案推薦系統(tǒng)的穩(wěn)定性。圖5為文三西路動(dòng)態(tài)子區(qū)在系統(tǒng)中的可視化界面,列表中顯示了組團(tuán)各交叉口的當(dāng)日?qǐng)?bào)警次數(shù)、子區(qū)交叉口數(shù)據(jù)和方案運(yùn)行啟動(dòng)時(shí)間等信息。子區(qū)附近有景區(qū)、學(xué)校、科技園區(qū),在高峰時(shí)段經(jīng)常發(fā)生擁堵狀況。按圖5中編號(hào)順序路口的SCATS編號(hào)分別為SCATS284、SCATS283、SCATS282、SCATS281、SCATS86和SCATS135。
圖5 文三西路動(dòng)態(tài)子區(qū)仿真界面
選取2019年4月某日上午7點(diǎn)到10點(diǎn)的該子區(qū)路口的動(dòng)態(tài)數(shù)據(jù)作為實(shí)驗(yàn)數(shù)據(jù)。為了更好地展示推薦方案的實(shí)際運(yùn)行效果,將真實(shí)的檢測器數(shù)據(jù)作為短時(shí)交通流量預(yù)測模塊的輸出數(shù)據(jù),其中三個(gè)路口的部分?jǐn)?shù)據(jù)如表2所示。表2中流量數(shù)據(jù)指在路口的運(yùn)行周期內(nèi)通過該車道的車輛數(shù)。
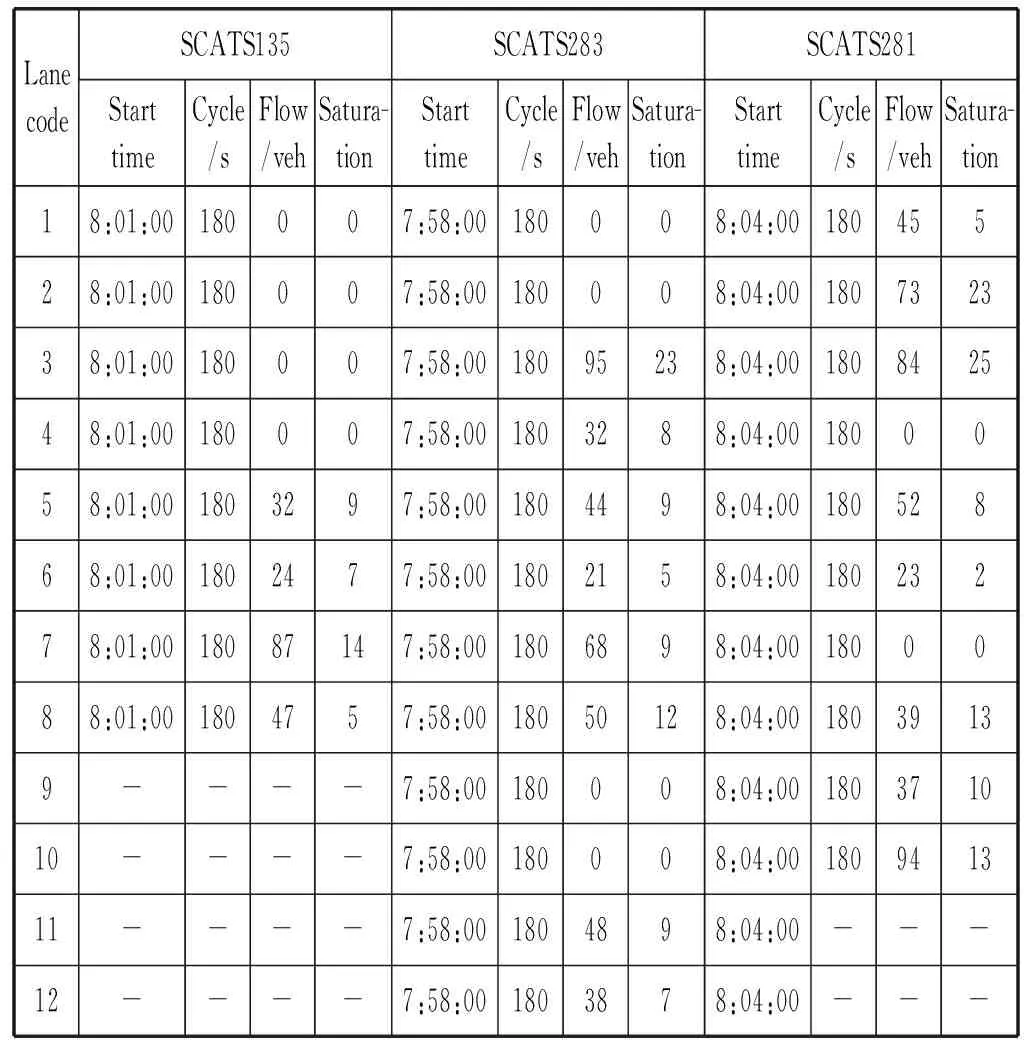
表2 路口檢測器的動(dòng)態(tài)數(shù)據(jù)
3.2 計(jì)算過程
由歷史子區(qū)數(shù)據(jù)庫中已經(jīng)劃分好的子區(qū)地理數(shù)據(jù)簇進(jìn)行動(dòng)態(tài)數(shù)據(jù)的聚類,子區(qū)的劃分由式(1)和式(2)計(jì)算。動(dòng)態(tài)子區(qū)的路口流量數(shù)據(jù)序列用于離線訓(xùn)練過程,使用不同的隨機(jī)種子進(jìn)行1 000次的模擬迭代。本文使用輪廓系數(shù)(SIL)確定k的值,其計(jì)算式表示為:
(9)
即:
(10)
由式(10)可以判斷:



圖6展示了不同簇值的輪廓系數(shù)曲線,在簇值為230時(shí)輪廓系數(shù)最接近1,說明此時(shí)聚類效果最好。
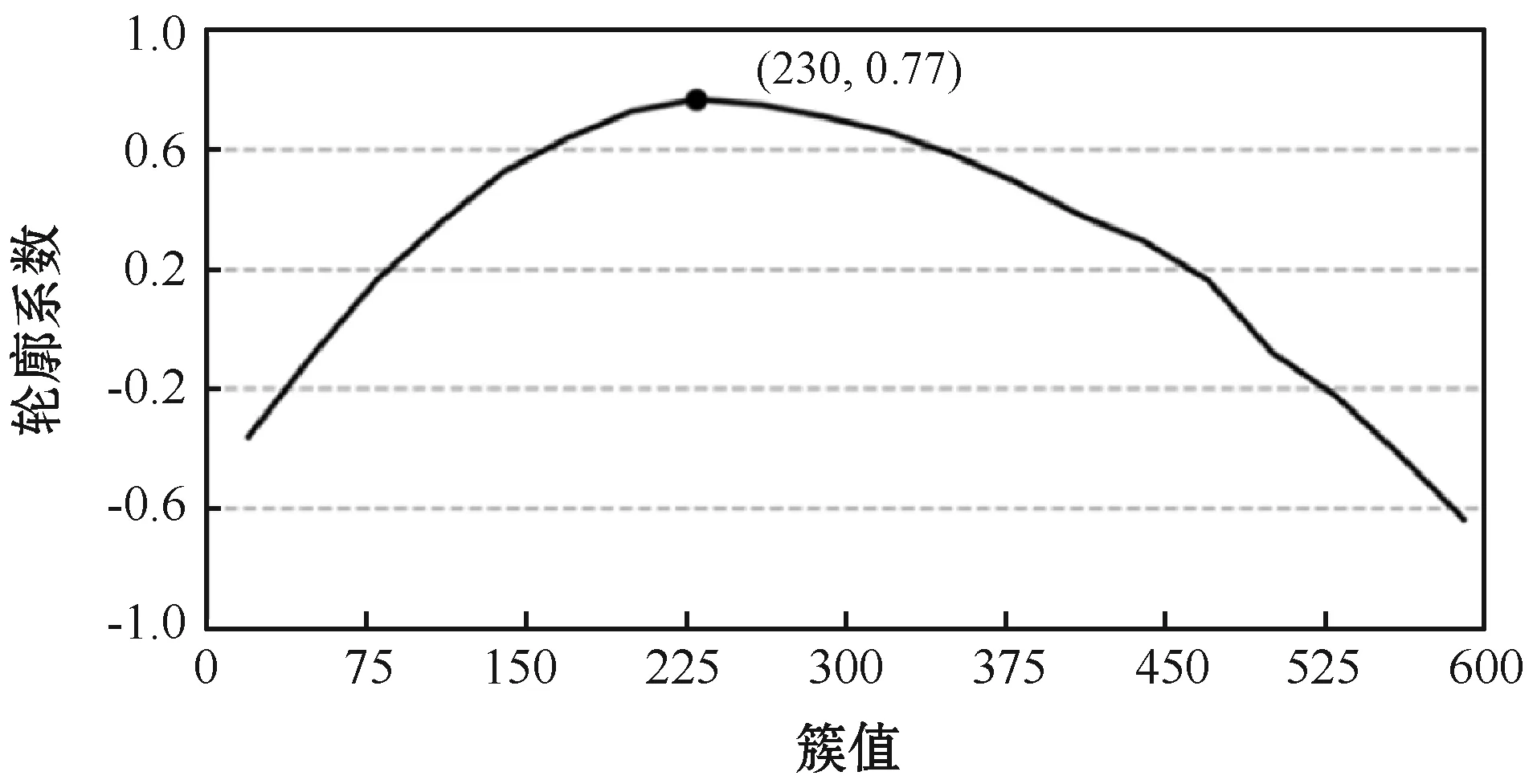
圖6 輪廓系數(shù)曲線
本文將設(shè)置三個(gè)實(shí)驗(yàn)分別使用歐氏距離[21]、皮爾森相關(guān)系數(shù)[22]和ACS模型驗(yàn)證推薦算法的有效性。為了控制實(shí)驗(yàn)的其他變量一致。將2019年1月份的檢測器數(shù)據(jù)分別使用歐氏距離ρ和皮爾森相關(guān)系數(shù)P對(duì)動(dòng)態(tài)子區(qū)簇重新聚類。實(shí)驗(yàn)一中D1(x)和實(shí)驗(yàn)二中D2(x)的取值計(jì)算如下:
D1(x)=ρ
(11)
(12)
Mean Absolute Error(MAE)的值能夠反映推薦方案與人為設(shè)定方案之間的差異,計(jì)算式如下:
(13)
式中:rt,h表示在時(shí)間t處、第h路口的控制參數(shù);T表示時(shí)間總步數(shù);H表示子區(qū)路口總數(shù)。
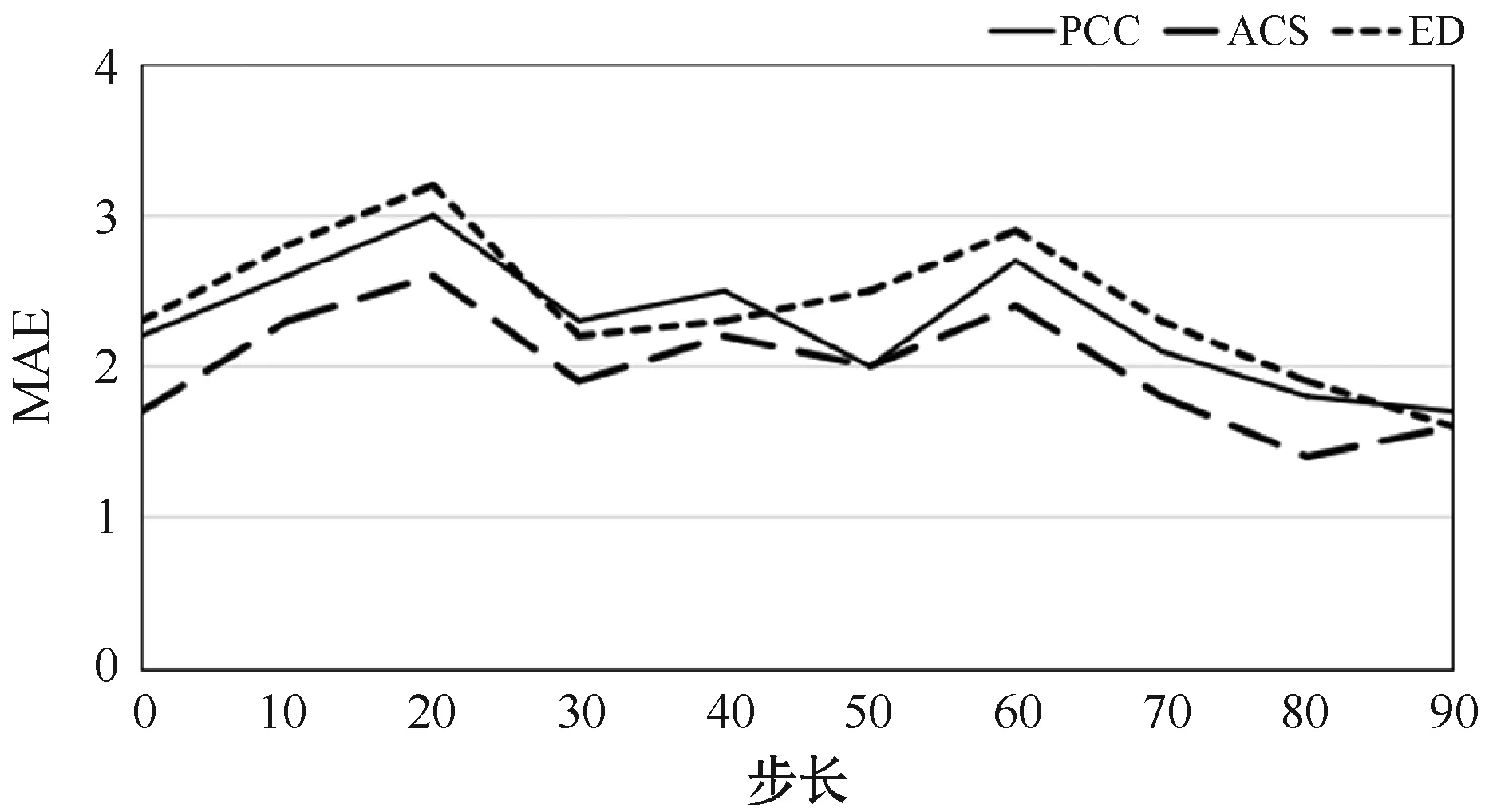
圖7(a)展示了三組實(shí)驗(yàn)在文三西路動(dòng)態(tài)子區(qū)上MAE隨時(shí)間變化曲線,圖7(b)三組實(shí)驗(yàn)推薦方案的運(yùn)行時(shí)間。由于ACS模型對(duì)計(jì)算參數(shù)的存儲(chǔ),ACS模型的運(yùn)行時(shí)間整體遠(yuǎn)低于其余兩組實(shí)驗(yàn)。而且,車道間流量數(shù)據(jù)差值嚴(yán)重影響周期內(nèi)相位時(shí)間的分配,這對(duì)于歐氏距離和皮爾森相關(guān)系數(shù)來說是不夠敏感的。
(a) MAE圖
(b) 運(yùn)行時(shí)間圖7 MAE曲線和運(yùn)行時(shí)間對(duì)比
3.3 實(shí)驗(yàn)評(píng)估
為了更好地驗(yàn)證系統(tǒng)在實(shí)際中的應(yīng)用,對(duì)文三動(dòng)態(tài)子區(qū)中的SCATS281路口進(jìn)行了一個(gè)月的測試。根據(jù)實(shí)際交通需求,靜態(tài)設(shè)置了路口的5個(gè)相位。圖8展示了系統(tǒng)推薦方案窗口。方案不僅分配了相位時(shí)間而且能夠根據(jù)交通需求增減相位,由于方案的參數(shù)源于車道流量的分析。這對(duì)于很多專家經(jīng)驗(yàn)推薦系統(tǒng)是非常困難的,因?yàn)樵谟?xùn)練模型中僅代理了相位。
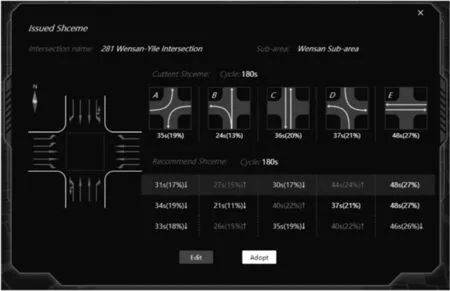
圖8 281路口方案推薦
據(jù)觀察,系統(tǒng)推薦相位調(diào)整策略基本符合人類決策。經(jīng)信號(hào)工程師修改系統(tǒng)推薦方案的數(shù)量遠(yuǎn)低于修改SCATS系統(tǒng)自適應(yīng)方案的數(shù)量,這說明信號(hào)工程師的工作量明顯降低。圖9(a)描繪了工作日SCATS281路口效率指數(shù)變化曲線,在2019年3月路口效率指數(shù)有明顯提高。此外,對(duì)比了系統(tǒng)部署前后文三西路子區(qū)中的主干道車流速度(圖9(b))。在交通高峰時(shí)段,主干道車流速度提高約2.17%,通行效率提高約1.95%。車流速度為車輛經(jīng)過檢測點(diǎn)的平均速度:
(14)
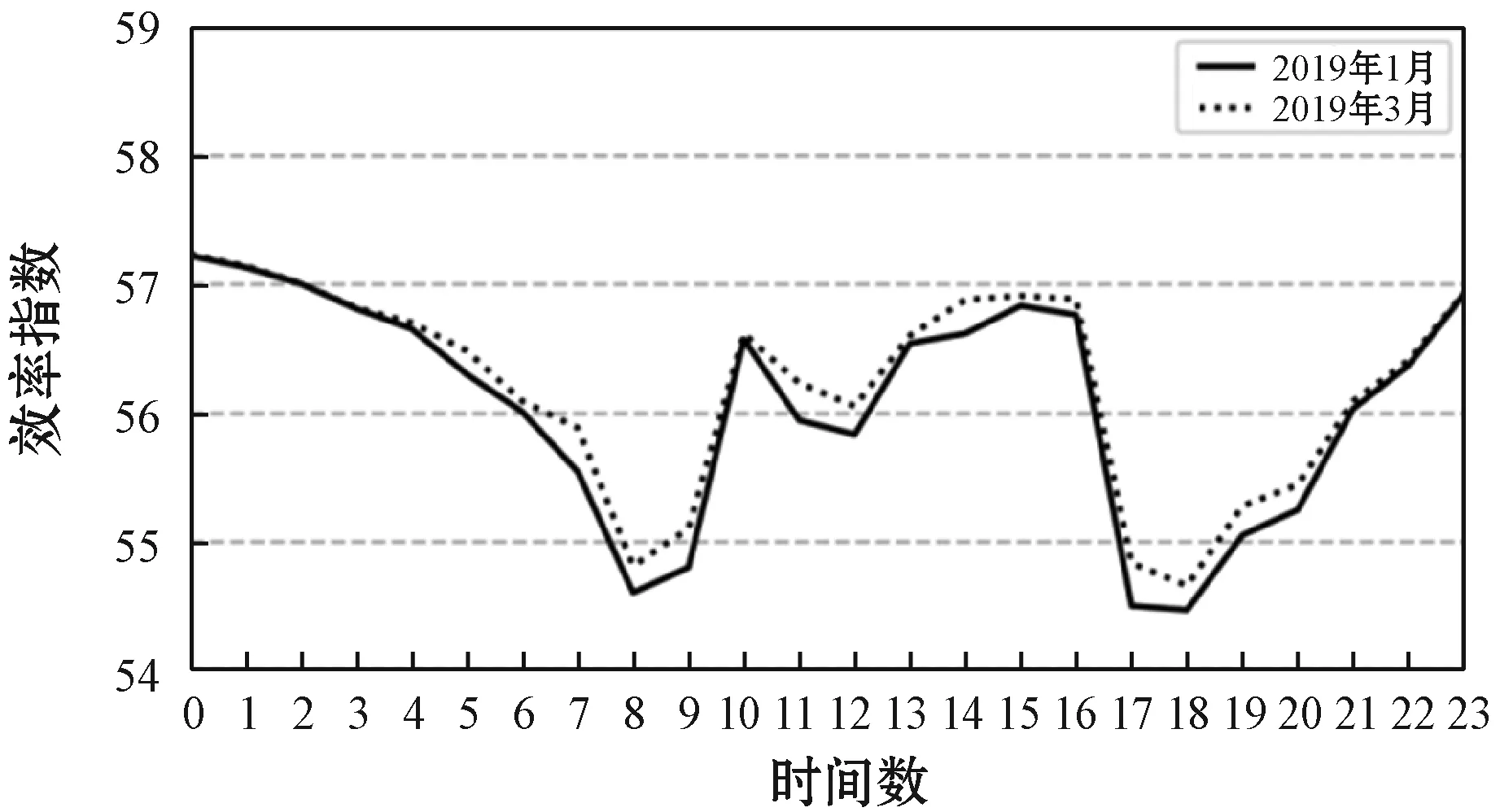
(a) SCATS281路口效率指數(shù)
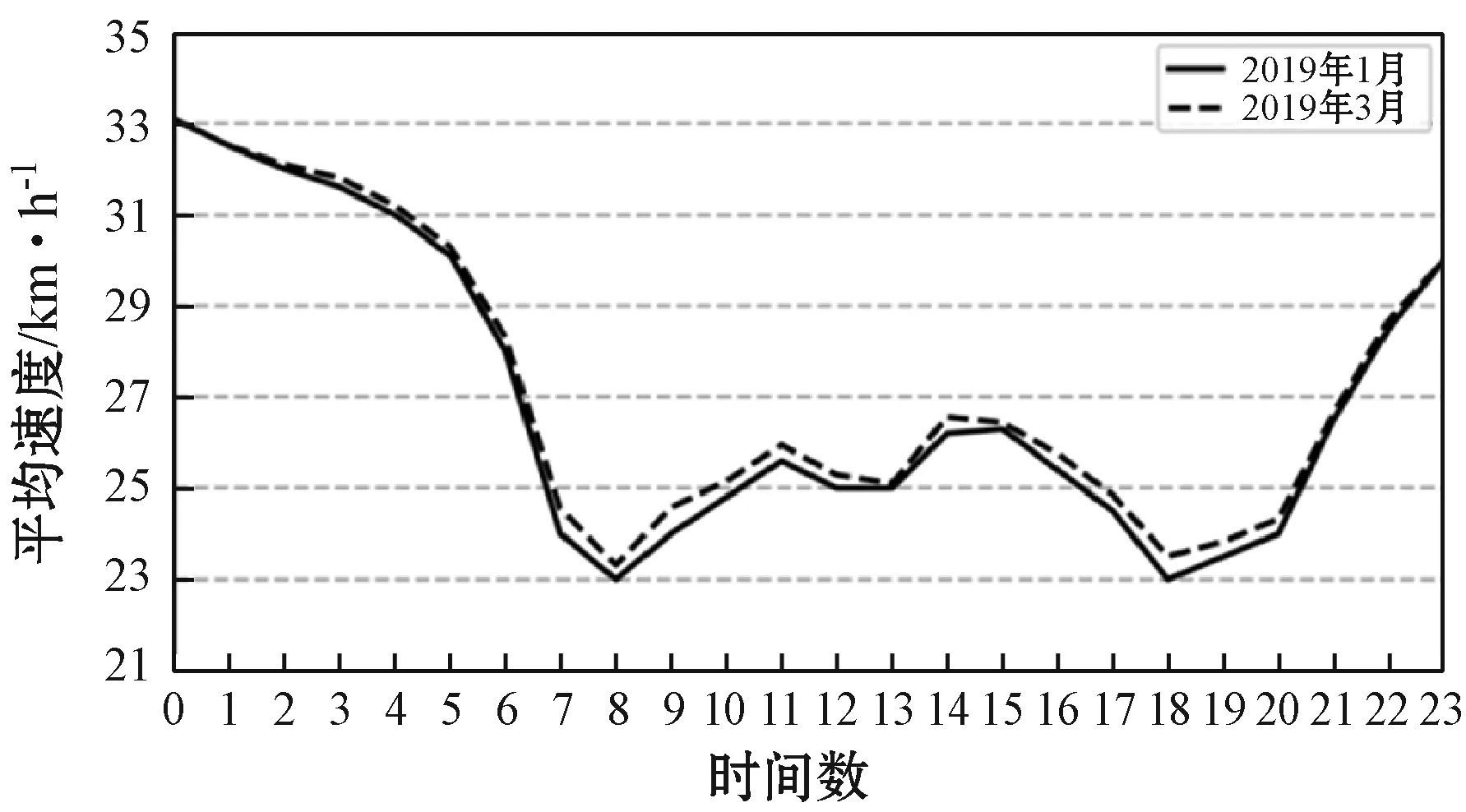
(b) 文三子區(qū)主干道車流速度圖9 子區(qū)通行效率和車流速度
式中:N表示經(jīng)過檢測點(diǎn)車輛的總數(shù);Vk表示第k輛車經(jīng)過檢測點(diǎn)的速度。
通行效率指數(shù):是以無量綱的數(shù)字反映當(dāng)前路口、區(qū)域道路交通通行效率狀態(tài)的一種定量表示,數(shù)值越大表示通行效率越好。計(jì)算方法如下:
(15)
(16)
此外,還對(duì)文三西路動(dòng)態(tài)子區(qū)中的其他路口推薦的方案進(jìn)行了評(píng)估。在某些時(shí)段這些路口沒有被劃進(jìn)相同子區(qū),但控制方案的推薦考慮了臨近路口交通狀況。因此,與SCATS系統(tǒng)自適應(yīng)方案相比,其余路口的推薦方案均得到了專業(yè)信號(hào)工程師的良好評(píng)價(jià)。但是,在平峰時(shí)段推薦方案效果不夠明顯,這可能是由于車道流量差別很小引起的。另一方面,系統(tǒng)存儲(chǔ)路口空間基礎(chǔ)配置信息,當(dāng)出現(xiàn)個(gè)別檢測器失效狀況時(shí),系統(tǒng)能對(duì)比出失效的檢測器編號(hào)并忽略對(duì)該數(shù)據(jù)的檢索,從而降低負(fù)面影響。
4 結(jié) 語
本文提出一種交通子區(qū)控制方案推薦系統(tǒng),在基于子區(qū)動(dòng)態(tài)數(shù)據(jù)聚類算法及協(xié)同推薦算法的技術(shù)背景下,該系統(tǒng)能夠訓(xùn)練歷史控制策略并學(xué)習(xí)當(dāng)前控制決策,輔助信號(hào)控制工程師提高道路通行效率,尤其是在交通高峰時(shí)期。該系統(tǒng)最實(shí)用的能力就是依賴現(xiàn)有的交通控制系統(tǒng)的檢測器數(shù)據(jù)并能夠直接發(fā)至信號(hào)控制終端。本文通過分布式聚類算法和參數(shù)復(fù)用的方式大幅提高推薦方案實(shí)時(shí)推薦的效率,為城市復(fù)雜多變的交通需求提供保障。
所提出的基于子區(qū)相似度的控制方案推薦系統(tǒng)在真實(shí)交通環(huán)境中實(shí)現(xiàn)。系統(tǒng)還包含了子區(qū)通行效率、平均速度等指標(biāo)的實(shí)時(shí)分析計(jì)算。在實(shí)驗(yàn)過程中,我們能直觀地看到控制方案運(yùn)行效果,有助于信號(hào)控制工程師與系統(tǒng)的交互。相比于以往的信號(hào)控制推薦系統(tǒng),該系統(tǒng)更注重路口間的相互協(xié)調(diào)。從相對(duì)宏觀的角度推薦路口的控制方案,從而降低對(duì)周邊路口的反作用。
然而,在實(shí)際運(yùn)行過程中,我們發(fā)現(xiàn)推薦系統(tǒng)仍有改進(jìn)空間。一方面將細(xì)化控制策略的影響因素,單獨(dú)分析特殊交通需求對(duì)推薦方案的干擾。另一方面將探索深度學(xué)習(xí)框架對(duì)歷史可訓(xùn)練數(shù)據(jù)參數(shù)優(yōu)化,以在推薦的方案中更多地考慮專家經(jīng)驗(yàn)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19